Спосіб руху транспортних засобів
Номер патенту: 114827
Опубліковано: 27.03.2017
Автори: Верхман Олександр Аркадійович, Лєвін Барух, Верхман Ілля Олександрович
Формула / Реферат
1. Спосіб руху транспортних засобів, що здійснюється шляхом пересування на ногах-опорах, які нерухомо стоять на землі, з почерговим переходом на інші ноги-опори, які можуть рухатись під платформою транспортного засобу в напрямку його руху, не торкаючись землі, періодично спираючись на землю і беручи на себе вагу транспортного засобу, який відрізняється тим, що ноги-опори за допомогою магнітного або вакуумного поля можуть утримуватись і рухатись під дном транспортного засобу в будь-якому напрямку, швидко змінюючи свою довжину, що дає їм можливість спиратись на землю незалежно від рельєфу дороги, беручи на себе вагу транспортного засобу і передаючи імпульси руху платформі транспортного засобу, наприклад, за допомогою лінійних (розгорнутих) електродвигунів.
2. Спосіб руху транспортних засобів за п. 1, який відрізняється тим, що живлення електроенергією всіх силових механізмів, лінійних електродвигунів, механізмів ніг-опор, системи автоматики тощо, транспортних засобів, виконаних за способом, здійснюється центральною енергетичною установкою або окремими енергетичними установками в кожній з ніг-опор з єдиною комп'ютеризованою системою керування їх рухом.
Текст
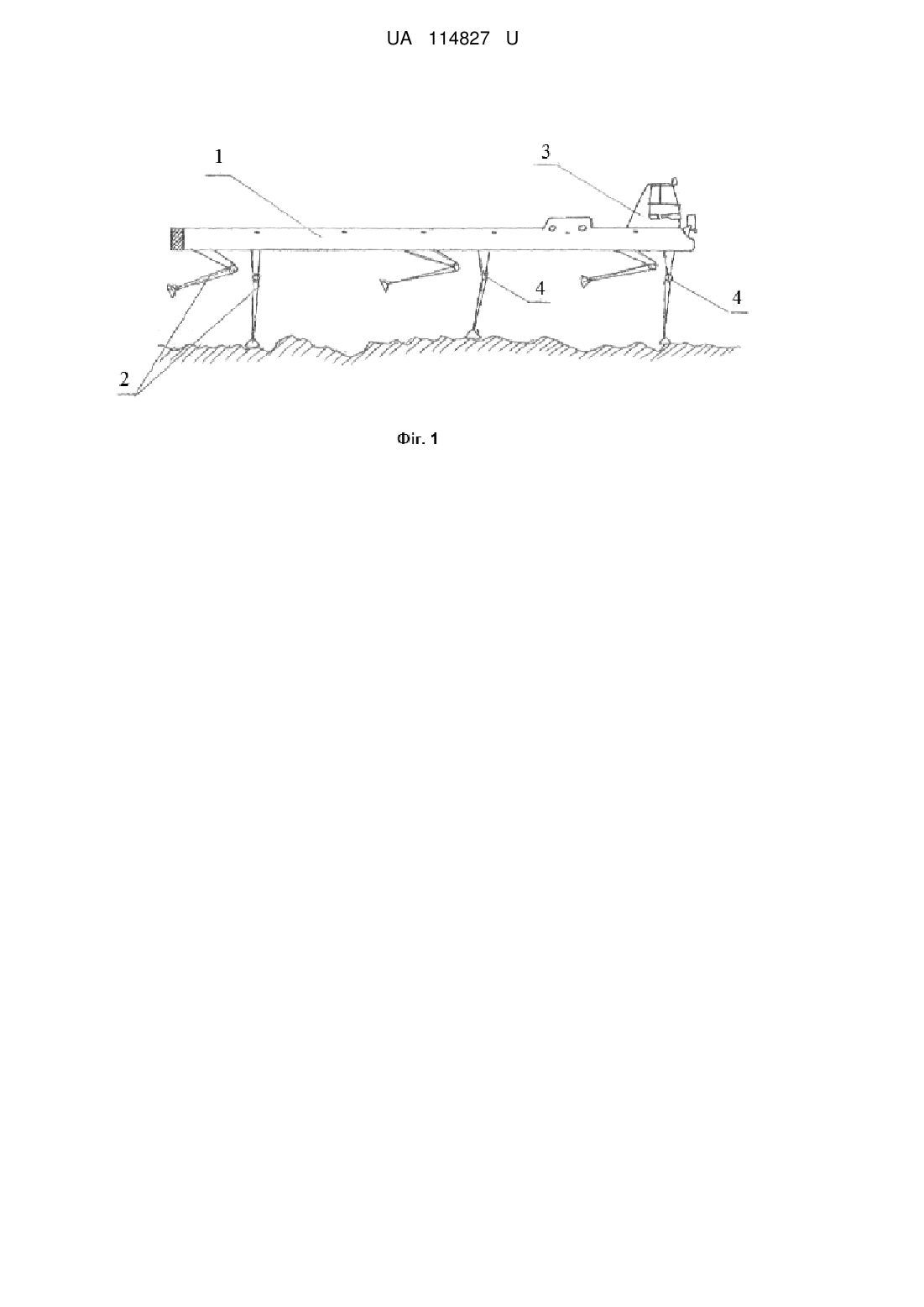
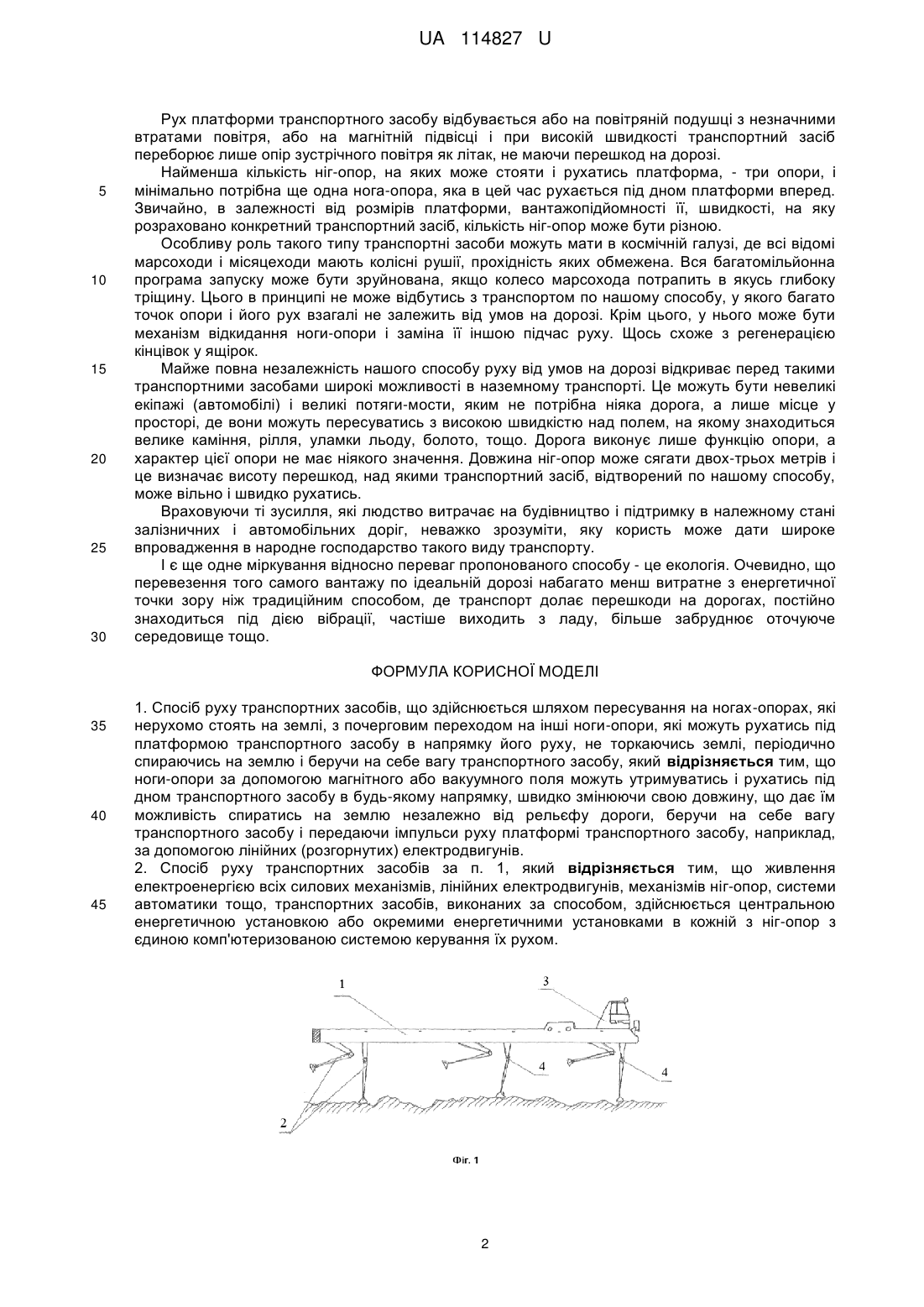
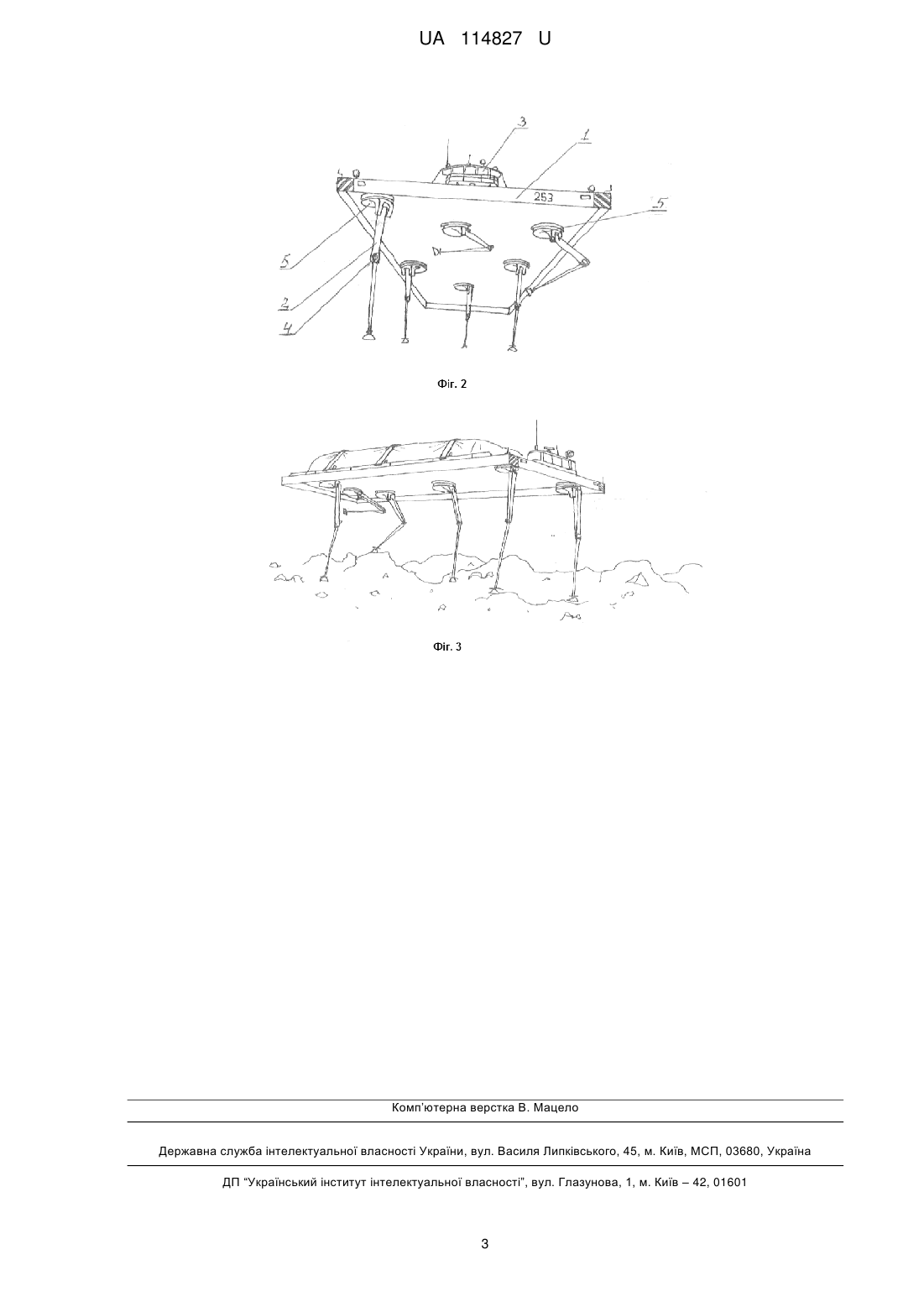
Реферат: Спосіб руху транспортних засобів здійснюється шляхом пересування на ногах-опорах, які нерухомо стоять на землі, з почерговим переходом на інші ноги-опори, які можуть рухатись під платформою транспортного засобу в напрямку його руху, не торкаючись землі, періодично спираючись на землю і беручи на себе вагу транспортного засобу. При цьому ноги-опори за допомогою магнітного або вакуумного поля можуть утримуватись і рухатись під дном транспортного засобу в будь-якому напрямку, швидко змінюючи свою довжину, що дає їм можливість спиратись на землю незалежно від рельєфу дороги, беручи на себе вагу транспортного засобу і передаючи імпульси руху платформі транспортного засобу, наприклад, за допомогою лінійних (розгорнутих) електродвигунів. UA 114827 U (54) СПОСІБ РУХУ ТРАНСПОРТНИХ ЗАСОБІВ UA 114827 U UA 114827 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до способів руху механічних транспортних засобів, а саме до транспортних засобів, які використовують важільні рушії, що спираються на дорогу, створюючи можливість позашляхового руху транспортного засобу в найтяжчих умовах бездоріжжя. Фактично сам рух по такому способу відбувається не по дорозі, а над дорогою, де створюються умови руху, незалежні від стану дороги. Всі транспортні засоби і колеса, і гусениці мають якісь точок, які хоч коротку мить нерухомо стоять на дорозі, спираючись на неї. Гусеничні рушії настеляють собі дорогу, по якій їдуть, і весь час перевозять її з собою. Їх залежність від умов на дорозі менша, ніж у коліс, і вони відповідно мають кращу прохідність, але і вони мають свої недоліки і залежать від мікрорельєфу дороги і її умов. В основу способу, який ми пропонуємо, поставлена задача зменшити залежність транспортного засобу від умов на дорозі, повністю відділити рух від дроги, не витрачати енергію на переборювання перешкод на ній, а використовувати дорогу тільки для того, щоб на неї спиратись. Відомий пристрій по а. с. СРСР № 310012 МПК Ε02F9/04 "Механизм перемещения транспортных и землеройных машин", де цей спосіб частково використано, але далеко не повною мірою. В цьому пристрої не вирішена проблема повертання транспортного засобу, він складний конструктивно і має невелику швидкість руху, що витікає з його призначення - це землерийна машина, яка може рухатись тільки в прямому напрямку. Цей пристрій один із великої кількості конструктивних втілень, які дозволяє відтворити спосіб, який ми пропонуємо. Суть нашого способу полягає в тому, що транспортні засоби, відтворені по ньому, рухаються над дорогою на ногах-опорах, які нерухомо стоять на землі, з почерговим переходом на інші ноги-опори, які вільно рухаються в будь-якому напрямку під платформою транспортного засобу, не торкаючись землі, періодично по команді ручної або комп'ютерної системи керування, спираючись на землю і беручи на себе вагу транспортного засобу, а сам рух ніг-опор під платформою відбувається за допомогою магнітного (або вакуумного) поля і, наприклад, лінійних електродвигунів. Одним із втілень пропонованого способу є пристрій, показаний схематично на фіг. 1, де показано: 1 - платформа транспортного засобу; 2 - пересувні ноги-опори; 3 - енергетична установка, кабіна керування; 4 - механізм зміни довжини ніг-опор; 5 - механізм повертання ніг-опор, лінійний електродвигун. На фіг. 2 показано вигляд платформи транспортного засобу під час руху на глядача. До речі, маючи теплові датчики в ногах-опорах, такий транспорт ніколи ні на кого не наїде. На фіг. 3 показано рух транспортного засобу, який рухається по перетятій поверхні Марса або Місяця. Спосіб руху транспортних засобів, пропонований нами, очевидний з креслень (фіг. 1-3) і не потребує спеціальних пояснень. Платформа транспортного засобу 1 спирається на ті ногиопори 2, які в даний момент нерухомо стоять на землі. Лінійні електродвигуни 5 або інші пристрої передають момент руху платформі і вона рухається в визначеному напрямку, спираючись на нерухомі ноги-опори через повітряну подушку (в умовах атмосфери) або через механічні підшипникові опори, або через магнітну рухому підвіску (в безатмосферних умовах) тощо. Рух транспортних засобів по пропонованому способу відбувається над дорогою, яка служить тільки опорою для ніг-опор 2, які нерухомо стоять на дорозі, в той час як платформа транспортного засобу 1 їде по верхніх частинах опор переважно в горизонтальному напрямку, не переборюючи ніяких перешкод на дорозі. Коли якась з ніг-опор 2 доходить до задньої частини платформи, включається механізм скорочення довжини опор 4 і нога-опора, не торкаючись землі, швидко рухається в передню частину платформи. Там вона знову впирається в землю, беручи на себе частину ваги транспортного засобу і передаючи йому момент руху в заданому напрямку, наприклад, за допомогою лінійного електродвигуна 5, ротором якого слугує нижня частина платформи. Спрацювання ніг-опор 2 керується автоматично або в ручному режимі, і рух платформи транспортного засобу 1 над дорогою є безперервним. На відміну від прототипу по а. с. СРСР № 310012 рух транспортного засобу по нашому способу може відбуватись в будь-якому заданому напрямку. В залежності від розміру платформи, кількості ніг-опор, часу спрацьовування механізму зміни довжини ніг-опор, швидкість руху транспортного засобу по пропонованому способу може бути значною, а витрати енергії невеликими, тому що рух відбувається без перешкод на дорозі і практично завжди в горизонтальному напрямку. 1 UA 114827 U 5 10 15 20 25 30 Рух платформи транспортного засобу відбувається або на повітряній подушці з незначними втратами повітря, або на магнітній підвісці і при високій швидкості транспортний засіб переборює лише опір зустрічного повітря як літак, не маючи перешкод на дорозі. Найменша кількість ніг-опор, на яких може стояти і рухатись платформа, - три опори, і мінімально потрібна ще одна нога-опора, яка в цей час рухається під дном платформи вперед. Звичайно, в залежності від розмірів платформи, вантажопідйомності її, швидкості, на яку розраховано конкретний транспортний засіб, кількість ніг-опор може бути різною. Особливу роль такого типу транспортні засоби можуть мати в космічній галузі, де всі відомі марсоходи і місяцеходи мають колісні рушії, прохідність яких обмежена. Вся багатомільйонна програма запуску може бути зруйнована, якщо колесо марсохода потрапить в якусь глибоку тріщину. Цього в принципі не може відбутись з транспортом по нашому способу, у якого багато точок опори і його рух взагалі не залежить від умов на дорозі. Крім цього, у нього може бути механізм відкидання ноги-опори і заміна її іншою підчас руху. Щось схоже з регенерацією кінцівок у ящірок. Майже повна незалежність нашого способу руху від умов на дорозі відкриває перед такими транспортними засобами широкі можливості в наземному транспорті. Це можуть бути невеликі екіпажі (автомобілі) і великі потяги-мости, яким не потрібна ніяка дорога, а лише місце у просторі, де вони можуть пересуватись з високою швидкістю над полем, на якому знаходиться велике каміння, рілля, уламки льоду, болото, тощо. Дорога виконує лише функцію опори, а характер цієї опори не має ніякого значення. Довжина ніг-опор може сягати двох-трьох метрів і це визначає висоту перешкод, над якими транспортний засіб, відтворений по нашому способу, може вільно і швидко рухатись. Враховуючи ті зусилля, які людство витрачає на будівництво і підтримку в належному стані залізничних і автомобільних доріг, неважко зрозуміти, яку користь може дати широке впровадження в народне господарство такого виду транспорту. І є ще одне міркування відносно переваг пропонованого способу - це екологія. Очевидно, що перевезення того самого вантажу по ідеальній дорозі набагато менш витратне з енергетичної точки зору ніж традиційним способом, де транспорт долає перешкоди на дорогах, постійно знаходиться під дією вібрації, частіше виходить з ладу, більше забруднює оточуюче середовище тощо. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 1. Спосіб руху транспортних засобів, що здійснюється шляхом пересування на ногах-опорах, які нерухомо стоять на землі, з почерговим переходом на інші ноги-опори, які можуть рухатись під платформою транспортного засобу в напрямку його руху, не торкаючись землі, періодично спираючись на землю і беручи на себе вагу транспортного засобу, який відрізняється тим, що ноги-опори за допомогою магнітного або вакуумного поля можуть утримуватись і рухатись під дном транспортного засобу в будь-якому напрямку, швидко змінюючи свою довжину, що дає їм можливість спиратись на землю незалежно від рельєфу дороги, беручи на себе вагу транспортного засобу і передаючи імпульси руху платформі транспортного засобу, наприклад, за допомогою лінійних (розгорнутих) електродвигунів. 2. Спосіб руху транспортних засобів за п. 1, який відрізняється тим, що живлення електроенергією всіх силових механізмів, лінійних електродвигунів, механізмів ніг-опор, системи автоматики тощо, транспортних засобів, виконаних за способом, здійснюється центральною енергетичною установкою або окремими енергетичними установками в кожній з ніг-опор з єдиною комп'ютеризованою системою керування їх рухом. 2 UA 114827 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори російськоюLevin Baruch
МПК / Мітки
МПК: B62D 57/02, B62D 57/032
Мітки: спосіб, транспортних, засобів, руху
Код посилання
<a href="https://ua.patents.su/5-114827-sposib-rukhu-transportnikh-zasobiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб руху транспортних засобів</a>
Спосіб регулювання дорожнього руху при виїзді оперативних транспортних засобів за викликом
Номер патенту: 92948
Опубліковано: 10.09.2014
Автори: Руденко Дмитро Васильович, Рицький Володимир Ігорович
МПК: B60W 40/04
Мітки: виїзді, дорожнього, руху, викликом, оперативних, спосіб, транспортних, регулювання, засобів
Формула / Реферат:
Спосіб регулювання дорожнього руху, який включає застосування GPS-моніторингу руху оперативного транспортного засобу, який відрізняється тим, що диспетчер оперативно-диспетчерської служби здійснює управління регулюючими сигналами світлофорів у відповідності з маршрутом руху оперативного транспортного засобу у необхідних місцях, згідно з прокладеними, заздалегідь розрахованими GPS-маршрутами.
Спосіб підвищення безпеки руху транспортних засобів
Номер патенту: 33987
Опубліковано: 25.07.2008
Автори: Кирєєв Володимир Петрович, Пабат Анастасія Анатоліївна, Пабат Анантолій Іванович
МПК: B61L 25/00, G08G 1/00
Мітки: спосіб, безпеки, руху, транспортних, засобів, підвищення
Формула / Реферат:
Спосіб підвищення безпеки руху транспортних засобів, який полягає в тому, що уздовж напрямку руху встановлюють засоби регулювання руху, дорожні знаки та світлофори, а водії зчитують інформацію знаків і сигналів світлофорів та керують транспортним засобом з урахуванням отриманої інформації, який відрізняється тим, що інформацію засобів регулювання руху, дорожніх знаків і сигналів світлофорів дублюють адекватним сигналом кодованого...
Система координації руху транспортних засобів і комплексного контролю за безпекою транспортного руху
Номер патенту: 96433
Опубліковано: 10.02.2015
Автори: Саратова Тетяна Сергіївна, Дергачов Константин Юрійович, Бандура Іван Миколайович, Кулік Анатолій Степанович
МПК: G08G 1/01
Мітки: засобів, контролю, координації, транспортних, безпекою, руху, комплексного, транспортного, система
Формула / Реферат:
Система координації руху транспортних засобів і комплексного контролю за безпекою транспортного руху, що містить антену супутникової навігації, на вхід якої надходить інформація від супутників, а вихід з'єднаний з першим входом першого блока управління на базі ЕОМ, що розміщений на посту-комутаторі, першу антену системи GSM, вихід якої з'єднаний з другим входом першого блока управління, перший модуль безпровідної передачі даних, вхід якого...
Спосіб визначення швидкостей руху транспортних засобів при зіткненні
Номер патенту: 54738
Опубліковано: 17.03.2003
Автори: Любарський Костянтин Анатолійович, Байков Валерій Павлович, Кисельов Володимир Борисович
МПК: G01N 19/00, B60J 9/00
Мітки: спосіб, визначення, засобів, швидкостей, зіткненні, руху, транспортних
Формула / Реферат:
Спосіб визначення швидкостей руху транспортних засобів при зіткненні, що включає визначення сумарних енергетичних витрат, які складаються з робіт сил опору переміщенням транспортних засобів в процесі їх відкидання після зіткнення і робіт деформацій кожного і-того транспортного засобу в момент зіткнення, визначення величин початкових лінійних швидкостей відкидання, які еквівалентні цим енергетичним витратам,...
Спосіб навантаженого резервування вимірників тримірного руху транспортних засобів
Номер патенту: 81711
Опубліковано: 25.01.2008
Автори: Корженко Олексій Васильович, Бандура Іван Миколайович
МПК: B64C 13/00
Мітки: тримірного, резервування, транспортних, спосіб, засобів, вимірників, навантаженого, руху
Формула / Реферат:
Спосіб навантаженого резервування вимірників тримірного руху транспортних засобів, який полягає у тому, що вимірюють проекції вектора на три взаємно перпендикулярні напрямки, співпадаючі з осями керування транспортного засобу, й логічно обробляють сигнали виміру, який відрізняється тим, що одночасно з виміром проекцій вектора на осі керування транспортного засобу вимірюють проекції вектора на чотири додаткові осі, розраховують проекції...
Попередній патент: Лопатка робочого колеса осьового компресора
Наступний патент: Пристрій для створення поперечних механічних напружень у рейках
Випадковий патент: Олива для компресорів холодильних машин