Культиватор-рослинопідживлювач
Номер патенту: 116320
Опубліковано: 10.05.2017
Автори: Надикто Володимир Трохимович, Малюта Сергій Іванович, Кошовий Микита Олексійович, Чаплинський Андрій Петрович

Формула / Реферат
1. Культиватор-рослинопідживлювач, що містить раму з причіпним пристроєм та приєднаними до неї секціями робочих органів, на яких за допомогою призм та бокових тримачів закріплені стійки робочих органів, який відрізняється тим, що стійки робочих органів виконані у вигляді прямих призм, основою яких є рівнобічні трапеції, а в тримачах виконані отвори відповідної форми.
2. Культиватор-рослинопідживлювач за п. 1, який відрізняється тим, що грані стійок, спряжені з більшими основами трапецій, розташовані "по ходу" агрегату.
3. Культиватор-рослинопідживлювач за п. 1, який відрізняється тим, що уклони бокових граней стійок близькі до 1:20.
Текст
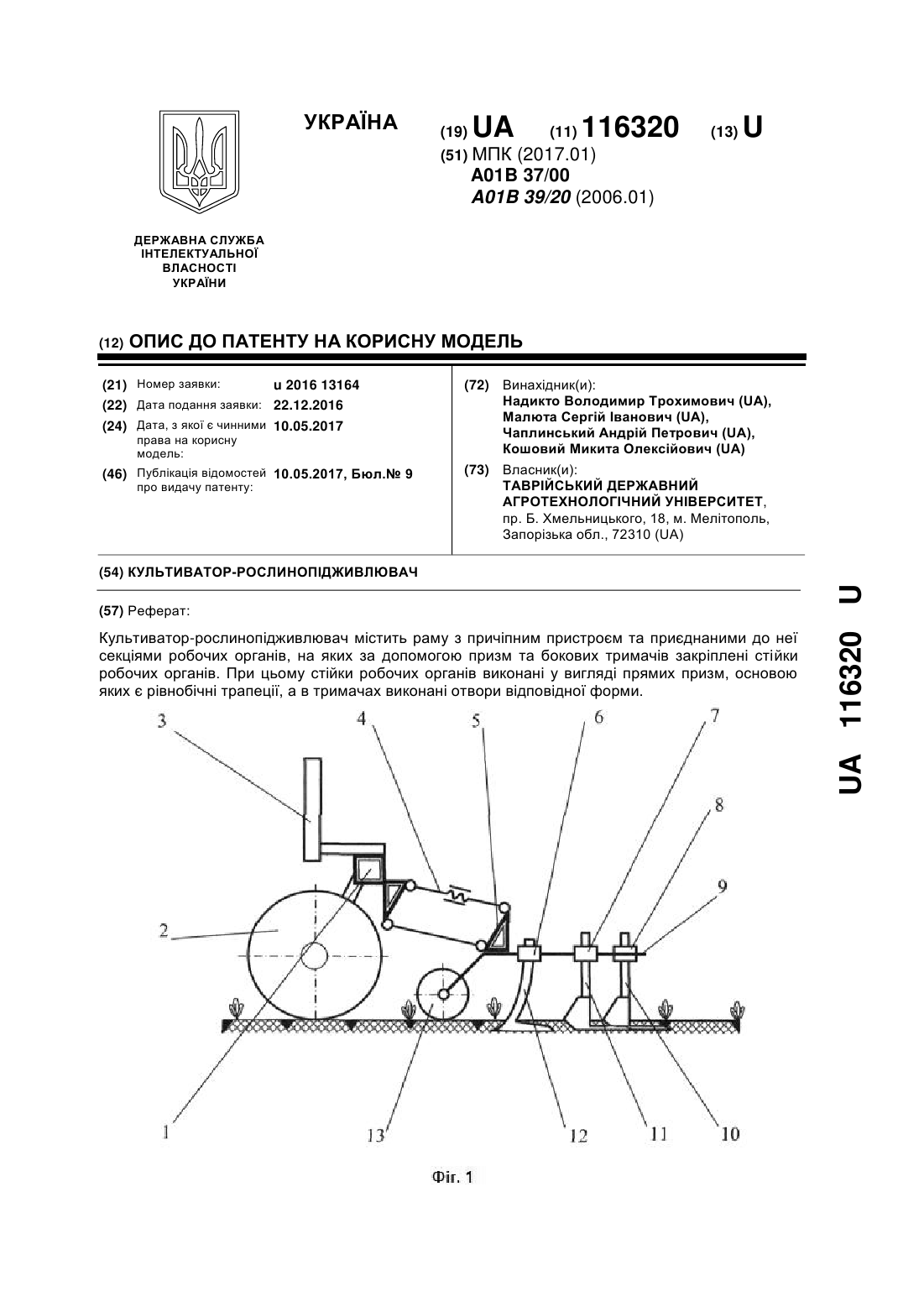
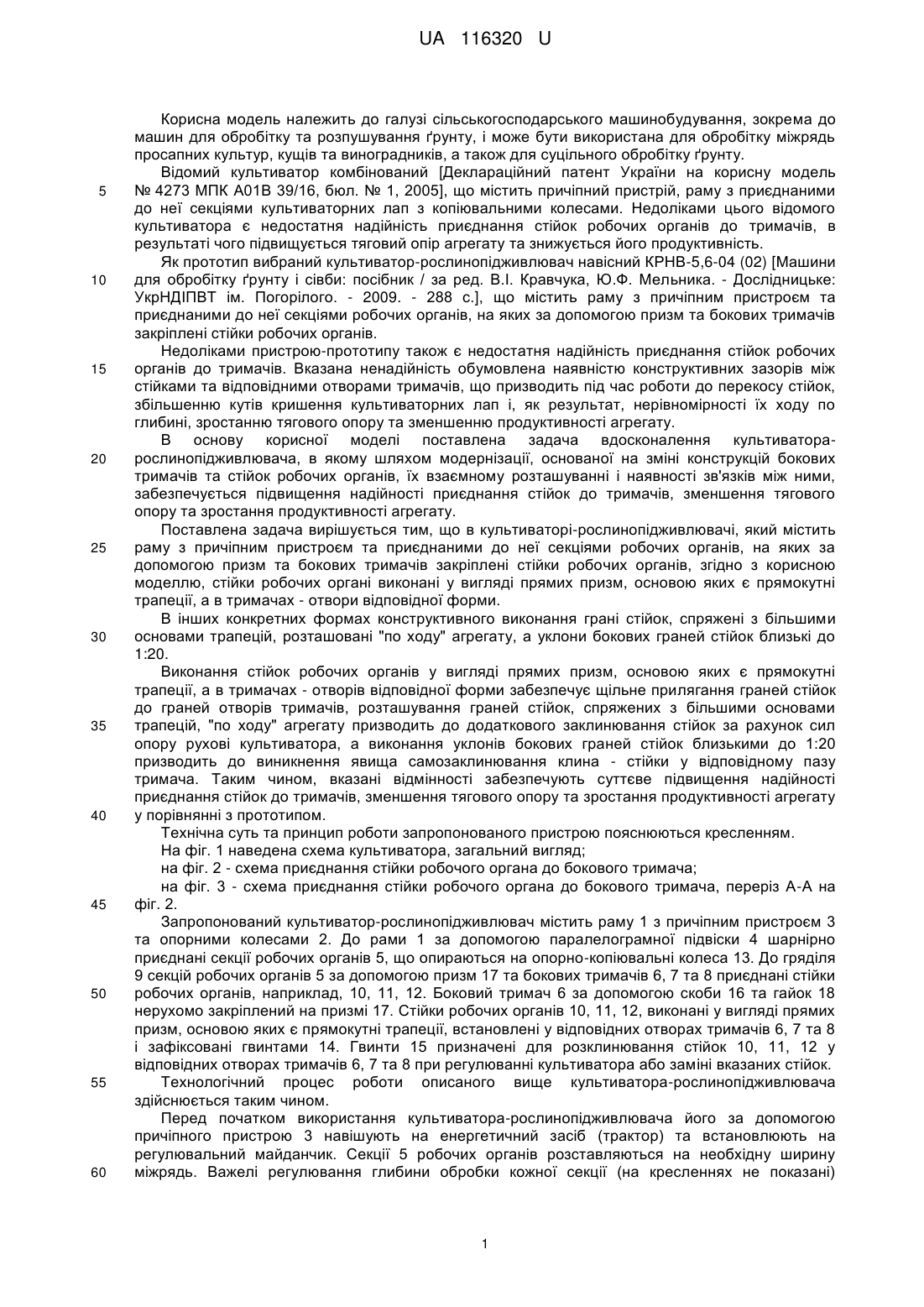
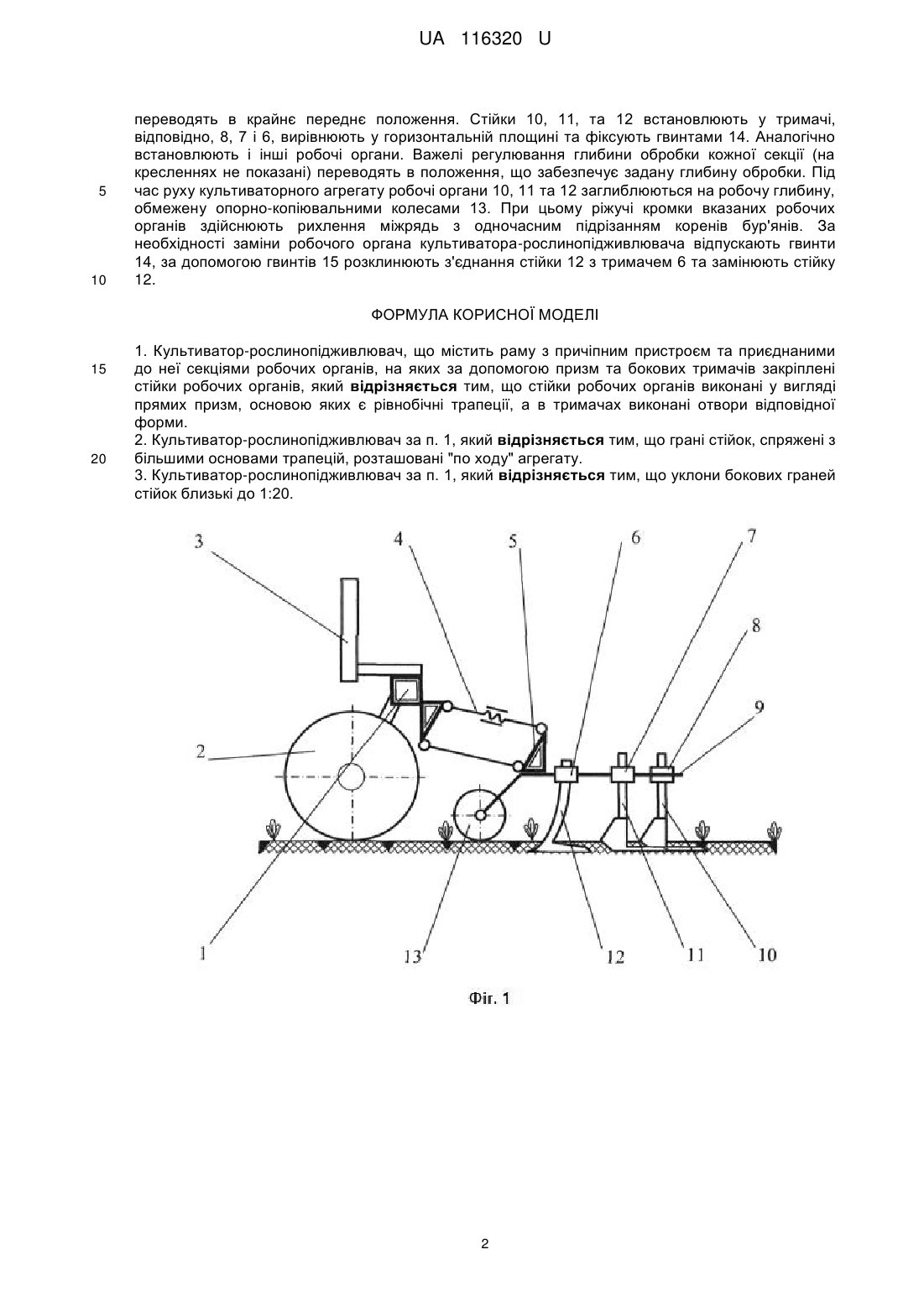
Реферат: Культиватор-рослинопідживлювач містить раму з причіпним пристроєм та приєднаними до неї секціями робочих органів, на яких за допомогою призм та бокових тримачів закріплені стійки робочих органів. При цьому стійки робочих органів виконані у вигляді прямих призм, основою яких є рівнобічні трапеції, а в тримачах виконані отвори відповідної форми. UA 116320 U (54) КУЛЬТИВАТОР-РОСЛИНОПІДЖИВЛЮВАЧ UA 116320 U UA 116320 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі сільськогосподарського машинобудування, зокрема до машин для обробітку та розпушування ґрунту, і може бути використана для обробітку міжрядь просапних культур, кущів та виноградників, а також для суцільного обробітку ґрунту. Відомий культиватор комбінований [Деклараційний патент України на корисну модель № 4273 МПК А01В 39/16, бюл. № 1, 2005], що містить причіпний пристрій, раму з приєднаними до неї секціями культиваторних лап з копіювальними колесами. Недоліками цього відомого культиватора є недостатня надійність приєднання стійок робочих органів до тримачів, в результаті чого підвищується тяговий опір агрегату та знижується його продуктивність. Як прототип вибраний культиватор-рослинопідживлювач навісний КРНВ-5,6-04 (02) [Машини для обробітку ґрунту і сівби: посібник / за ред. В.І. Кравчука, Ю.Ф. Мельника. - Дослідницьке: УкрНДІПВТ ім. Погорілого. - 2009. - 288 с.], що містить раму з причіпним пристроєм та приєднаними до неї секціями робочих органів, на яких за допомогою призм та бокових тримачів закріплені стійки робочих органів. Недоліками пристрою-прототипу також є недостатня надійність приєднання стійок робочих органів до тримачів. Вказана ненадійність обумовлена наявністю конструктивних зазорів між стійками та відповідними отворами тримачів, що призводить під час роботи до перекосу стійок, збільшенню кутів кришення культиваторних лап і, як результат, нерівномірності їх ходу по глибині, зростанню тягового опору та зменшенню продуктивності агрегату. В основу корисної моделі поставлена задача вдосконалення культиваторарослинопідживлювача, в якому шляхом модернізації, основаної на зміні конструкцій бокових тримачів та стійок робочих органів, їх взаємному розташуванні і наявності зв'язків між ними, забезпечується підвищення надійності приєднання стійок до тримачів, зменшення тягового опору та зростання продуктивності агрегату. Поставлена задача вирішується тим, що в культиваторі-рослинопідживлювачі, який містить раму з причіпним пристроєм та приєднаними до неї секціями робочих органів, на яких за допомогою призм та бокових тримачів закріплені стійки робочих органів, згідно з корисною моделлю, стійки робочих органі виконані у вигляді прямих призм, основою яких є прямокутні трапеції, а в тримачах - отвори відповідної форми. В інших конкретних формах конструктивного виконання грані стійок, спряжені з більшими основами трапецій, розташовані "по ходу" агрегату, а уклони бокових граней стійок близькі до 1:20. Виконання стійок робочих органів у вигляді прямих призм, основою яких є прямокутні трапеції, а в тримачах - отворів відповідної форми забезпечує щільне прилягання граней стійок до граней отворів тримачів, розташування граней стійок, спряжених з більшими основами трапецій, "по ходу" агрегату призводить до додаткового заклинювання стійок за рахунок сил опору рухові культиватора, а виконання уклонів бокових граней стійок близькими до 1:20 призводить до виникнення явища самозаклинювання клина - стійки у відповідному пазу тримача. Таким чином, вказані відмінності забезпечують суттєве підвищення надійності приєднання стійок до тримачів, зменшення тягового опору та зростання продуктивності агрегату у порівнянні з прототипом. Технічна суть та принцип роботи запропонованого пристрою пояснюються кресленням. На фіг. 1 наведена схема культиватора, загальний вигляд; на фіг. 2 - схема приєднання стійки робочого органа до бокового тримача; на фіг. 3 - схема приєднання стійки робочого органа до бокового тримача, переріз А-А на фіг. 2. Запропонований культиватор-рослинопідживлювач містить раму 1 з причіпним пристроєм 3 та опорними колесами 2. До рами 1 за допомогою паралелограмної підвіски 4 шарнірно приєднані секції робочих органів 5, що опираються на опорно-копіювальні колеса 13. До гряділя 9 секцій робочих органів 5 за допомогою призм 17 та бокових тримачів 6, 7 та 8 приєднані стійки робочих органів, наприклад, 10, 11, 12. Боковий тримач 6 за допомогою скоби 16 та гайок 18 нерухомо закріплений на призмі 17. Стійки робочих органів 10, 11, 12, виконані у вигляді прямих призм, основою яких є прямокутні трапеції, встановлені у відповідних отворах тримачів 6, 7 та 8 і зафіксовані гвинтами 14. Гвинти 15 призначені для розклинювання стійок 10, 11, 12 у відповідних отворах тримачів 6, 7 та 8 при регулюванні культиватора або заміні вказаних стійок. Технологічний процес роботи описаного вище культиватора-рослинопідживлювача здійснюється таким чином. Перед початком використання культиватора-рослинопідживлювача його за допомогою причіпного пристрою 3 навішують на енергетичний засіб (трактор) та встановлюють на регулювальний майданчик. Секції 5 робочих органів розставляються на необхідну ширину міжрядь. Важелі регулювання глибини обробки кожної секції (на кресленнях не показані) 1 UA 116320 U 5 10 переводять в крайнє переднє положення. Стійки 10, 11, та 12 встановлюють у тримачі, відповідно, 8, 7 і 6, вирівнюють у горизонтальній площині та фіксують гвинтами 14. Аналогічно встановлюють і інші робочі органи. Важелі регулювання глибини обробки кожної секції (на кресленнях не показані) переводять в положення, що забезпечує задану глибину обробки. Під час руху культиваторного агрегату робочі органи 10, 11 та 12 заглиблюються на робочу глибину, обмежену опорно-копіювальними колесами 13. При цьому ріжучі кромки вказаних робочих органів здійснюють рихлення міжрядь з одночасним підрізанням коренів бур'янів. За необхідності заміни робочого органа культиватора-рослинопідживлювача відпускають гвинти 14, за допомогою гвинтів 15 розклинюють з'єднання стійки 12 з тримачем 6 та замінюють стійку 12. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 1. Культиватор-рослинопідживлювач, що містить раму з причіпним пристроєм та приєднаними до неї секціями робочих органів, на яких за допомогою призм та бокових тримачів закріплені стійки робочих органів, який відрізняється тим, що стійки робочих органів виконані у вигляді прямих призм, основою яких є рівнобічні трапеції, а в тримачах виконані отвори відповідної форми. 2. Культиватор-рослинопідживлювач за п. 1, який відрізняється тим, що грані стійок, спряжені з більшими основами трапецій, розташовані "по ходу" агрегату. 3. Культиватор-рослинопідживлювач за п. 1, який відрізняється тим, що уклони бокових граней стійок близькі до 1:20. 2 UA 116320 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: A01B 39/20, A01B 37/00
Мітки: культиватор-рослинопідживлювач
Код посилання
<a href="https://ua.patents.su/5-116320-kultivator-roslinopidzhivlyuvach.html" target="_blank" rel="follow" title="База патентів України">Культиватор-рослинопідживлювач</a>
Культиватор-рослинопідживлювач

Номер патенту: 104051
Опубліковано: 25.12.2013
Автор: Малюта Сергій Іванович
МПК: A01B 37/00, A01B 39/22
Мітки: культиватор-рослинопідживлювач
Формула / Реферат:
1. Культиватор-рослинопідживлювач, що включає раму з причіпним пристроєм та приєднаними до неї секціями робочих органів, на яких за допомогою призм та бокових тримачів закріплені стійки робочих органів, який відрізняється тим, що в стійках робочих органів виконані наскрізні отвори, бокові тримачі виготовлені у вигляді порожнистих прямокутних паралелепіпедів, в одній з бокових граней яких виконані косі розрізи шириною, що дорівнює ширині...
Культиватор-рослинопідживлювач

Номер патенту: 107938
Опубліковано: 24.06.2016
Автори: Чаплинський Андрій Петрович, Малюта Сергій Іванович, Надикто Володимир Трохимович, Бадло Денис Сергійович
МПК: A01B 37/00, A01B 49/00
Мітки: культиватор-рослинопідживлювач
Формула / Реферат:
Культиватор-рослинопідживлювач, що містить раму з причіпним пристроєм та приєднаними до неї секціями робочих органів, на гряділях яких за допомогою призм та бокових тримачів закріплені стійки робочих органів, який відрізняється тим, що гряділі оснащені швидкознімними подовжувачами.
Культиватор-рослинопідживлювач
Номер патенту: 107557
Опубліковано: 10.06.2016
Автори: Сіладій Андрій Володимирович, Малюта Сергій Іванович, Надикто Володимир Трохимович, Чаплинський Андрій Петрович
МПК: A01B 39/00, A01B 37/00
Мітки: культиватор-рослинопідживлювач
Формула / Реферат:
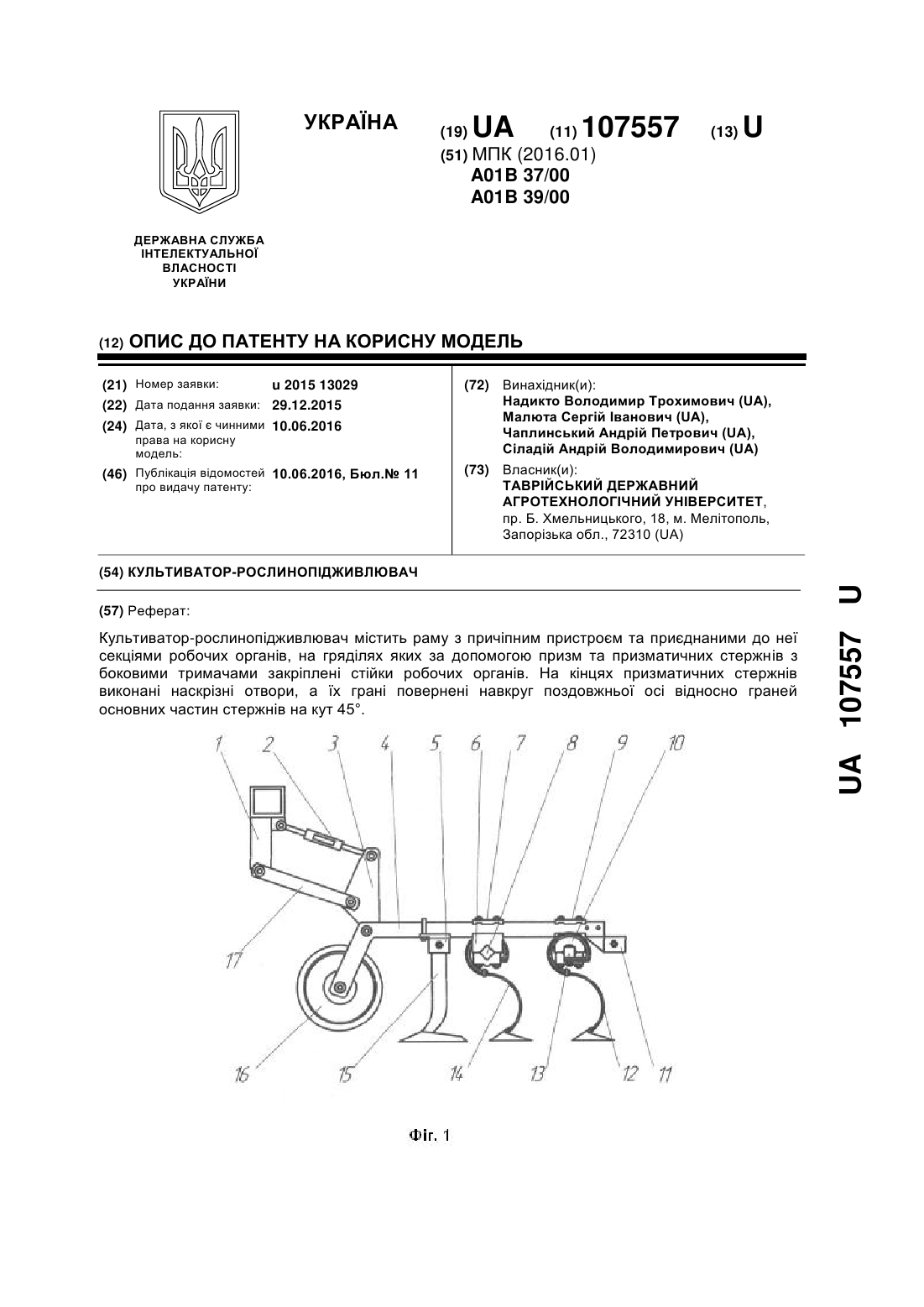
Культиватор-рослинопідживлювач, що містить раму з причіпним пристроєм та приєднаними до неї секціями робочих органів, на гряділях яких за допомогою призм та призматичних стержнів з боковими тримачами закріплені стійки робочих органів, який відрізняється тим, що на кінцях призматичних стержнів виконані наскрізні отвори, а їх грані повернені навкруг поздовжньої осі відносно граней основних частин стержнів на кут 45°.
Культиватор-рослинопідживлювач
Номер патенту: 100644
Опубліковано: 10.08.2015
Автор: Малюта Сергій Іванович
МПК: A01B 37/00
Мітки: культиватор-рослинопідживлювач
Формула / Реферат:
Культиватор-рослинопідживлювач, що включає брус, на якому закріплені замок автоматичного начіпного пристрою, опорно-привідні колеса, секції робочих органів, пристрій для підживлення, ротаційні голчасті диски, який відрізняється тим, що голки ротаційних голчастих дисків виконані порожнистими, а приєднання ротаційних голчастих дисків до осі - у вигляді кранового гідравлічного розподільника.
Культиватор-рослинопідживлювач
Номер патенту: 100652
Опубліковано: 10.08.2015
Автор: Малюта Сергій Іванович
МПК: A01B 37/00
Мітки: культиватор-рослинопідживлювач
Формула / Реферат:
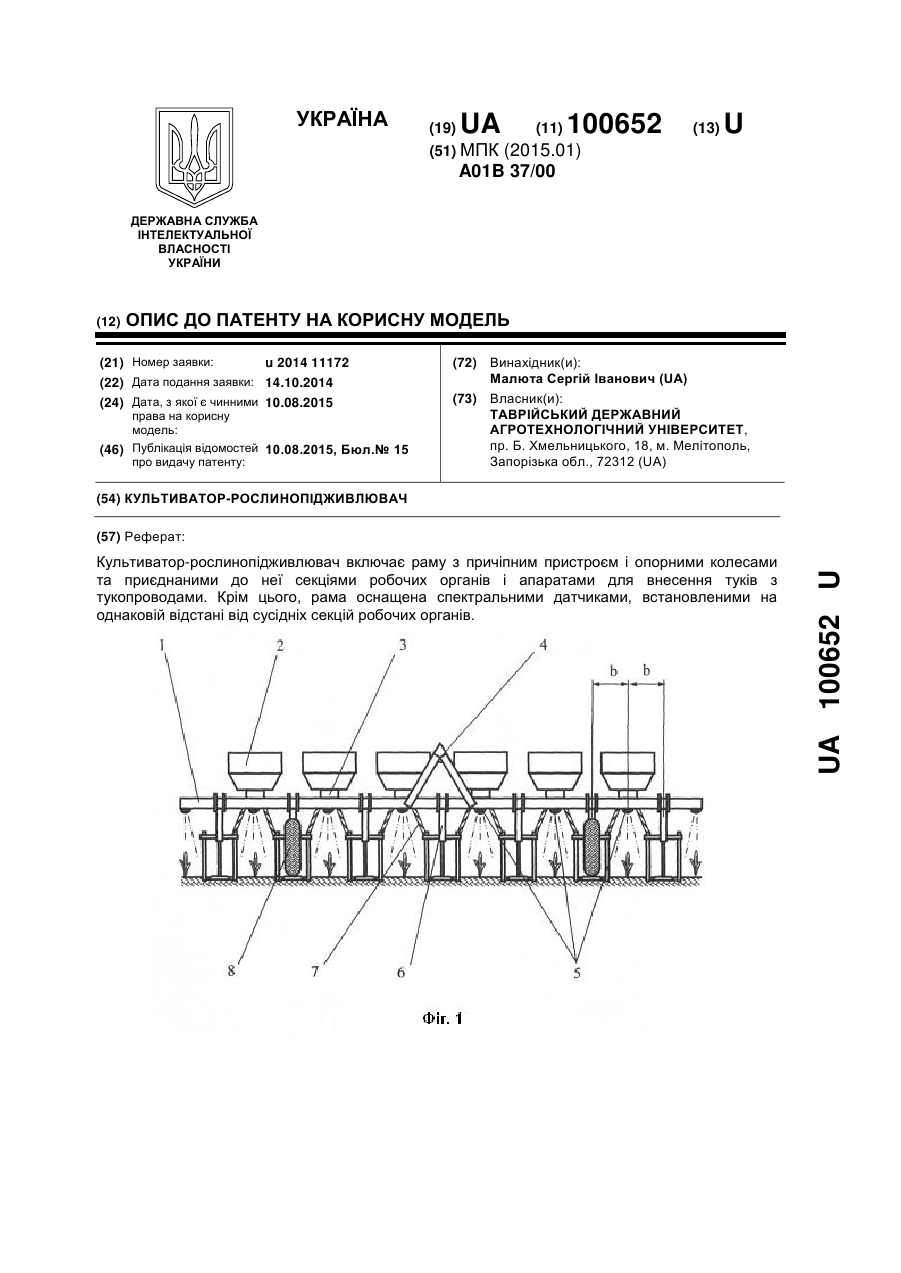
Культиватор-рослинопідживлювач, що включає раму з причіпним пристроєм і опорними колесами та приєднаними до неї секціями робочих органів і апаратами для внесення туків з тукопроводами, який відрізняється тим, що рама оснащена спектральними датчиками, встановленими на однаковій відстані від сусідніх секцій робочих органів.
Попередній патент: Ущільнювач флотошламу
Наступний патент: Резистивний сенсор пероксиду водню
Випадковий патент: Макроліди