Магнітоіндукційний перетворювач
Номер патенту: 118689
Опубліковано: 28.08.2017
Автори: Кравець Сергій Вадимович, Малицький Дмитро Васильович, Асташкіна Олександра Анатоліївна
Формула / Реферат
Магнітоіндукційний перетворювач, який має корпус, пасивний індуктор, активний індуктор, друковану плату, який відрізняється тим, що додатково має центр ваги, пружину, масу та маятник, при цьому пасивний індуктор через маятник з'єднаний з масою, а активний індуктор розташований на друкованій платі, яка прикріплена до корпусу.
Текст
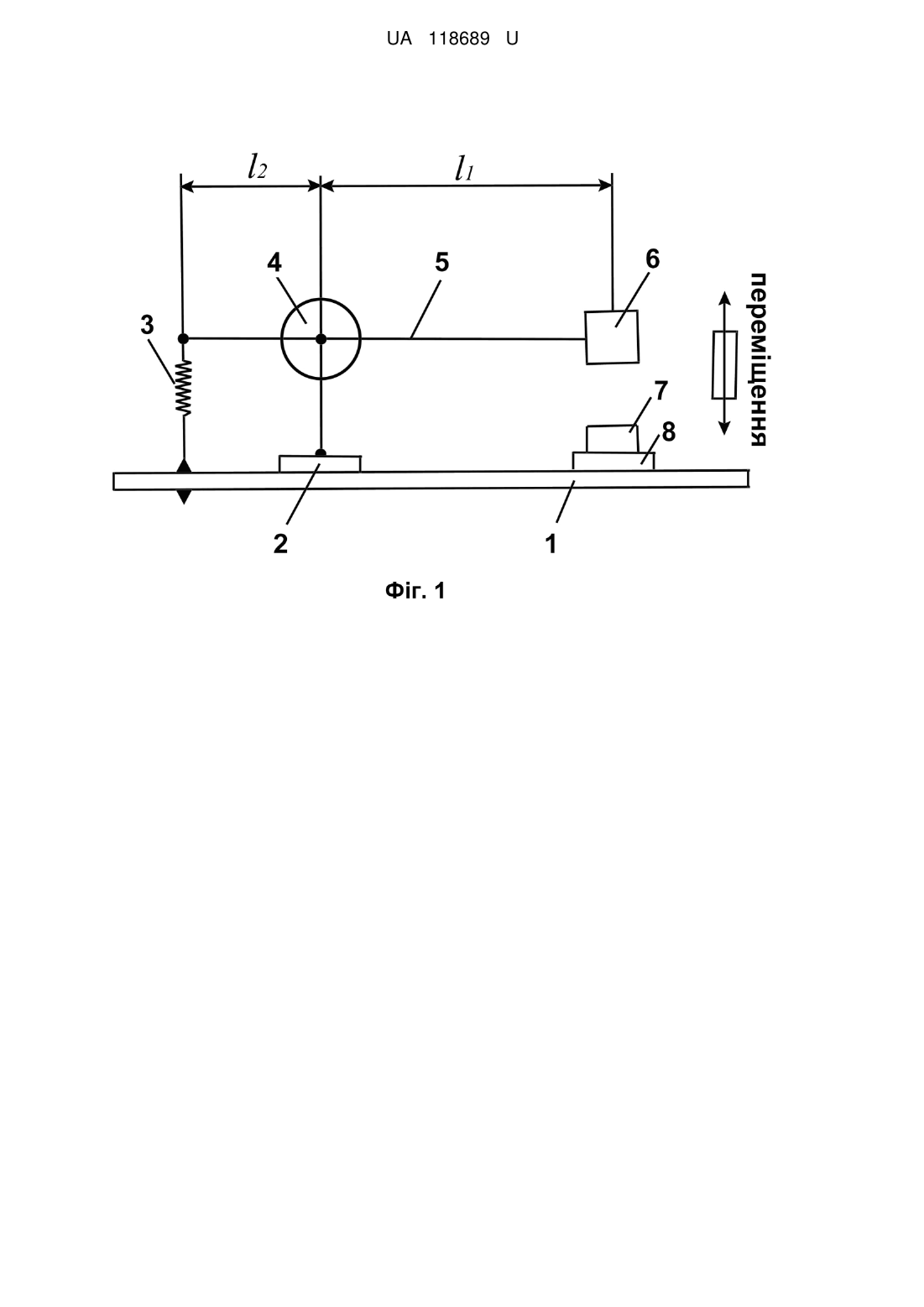
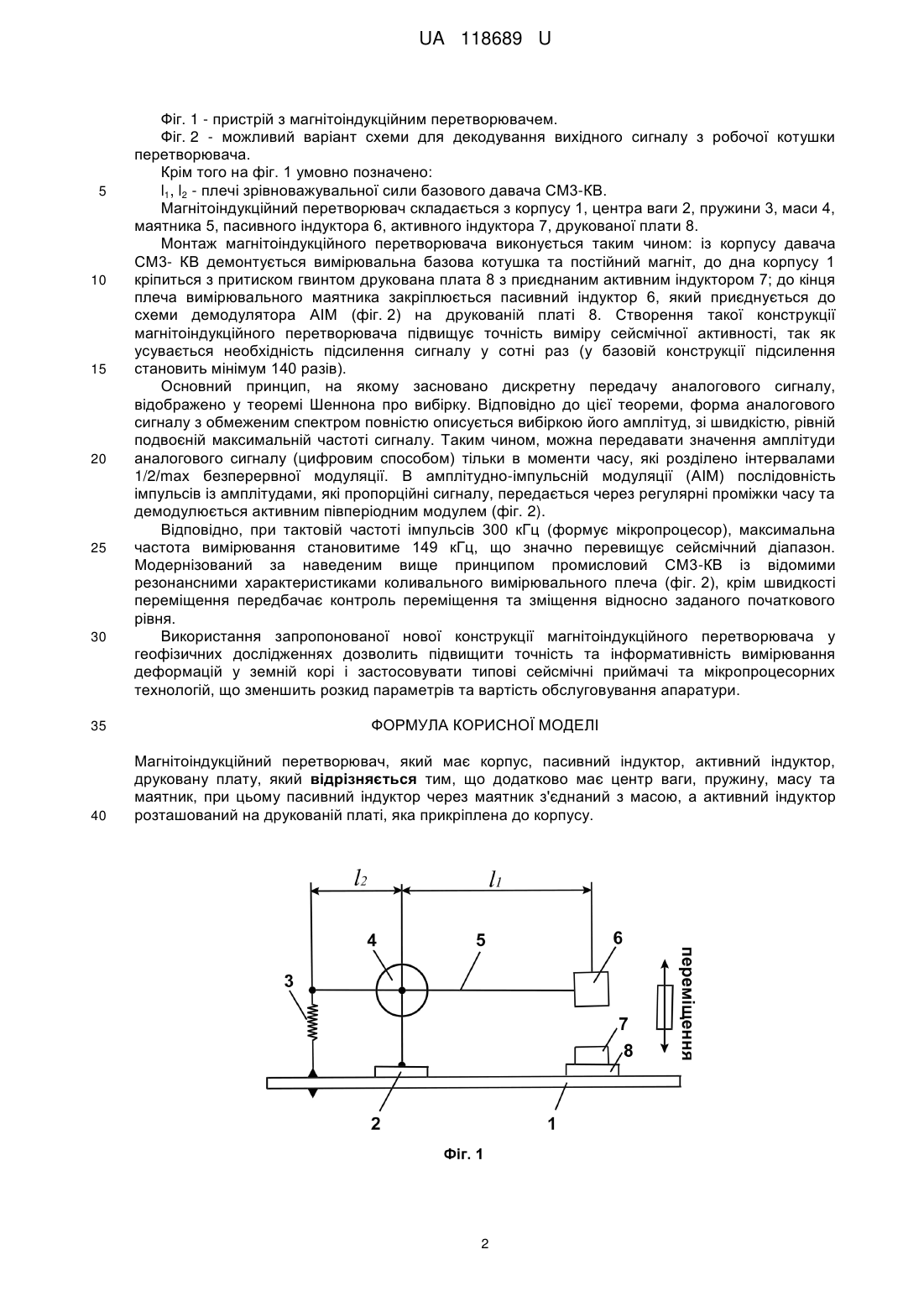
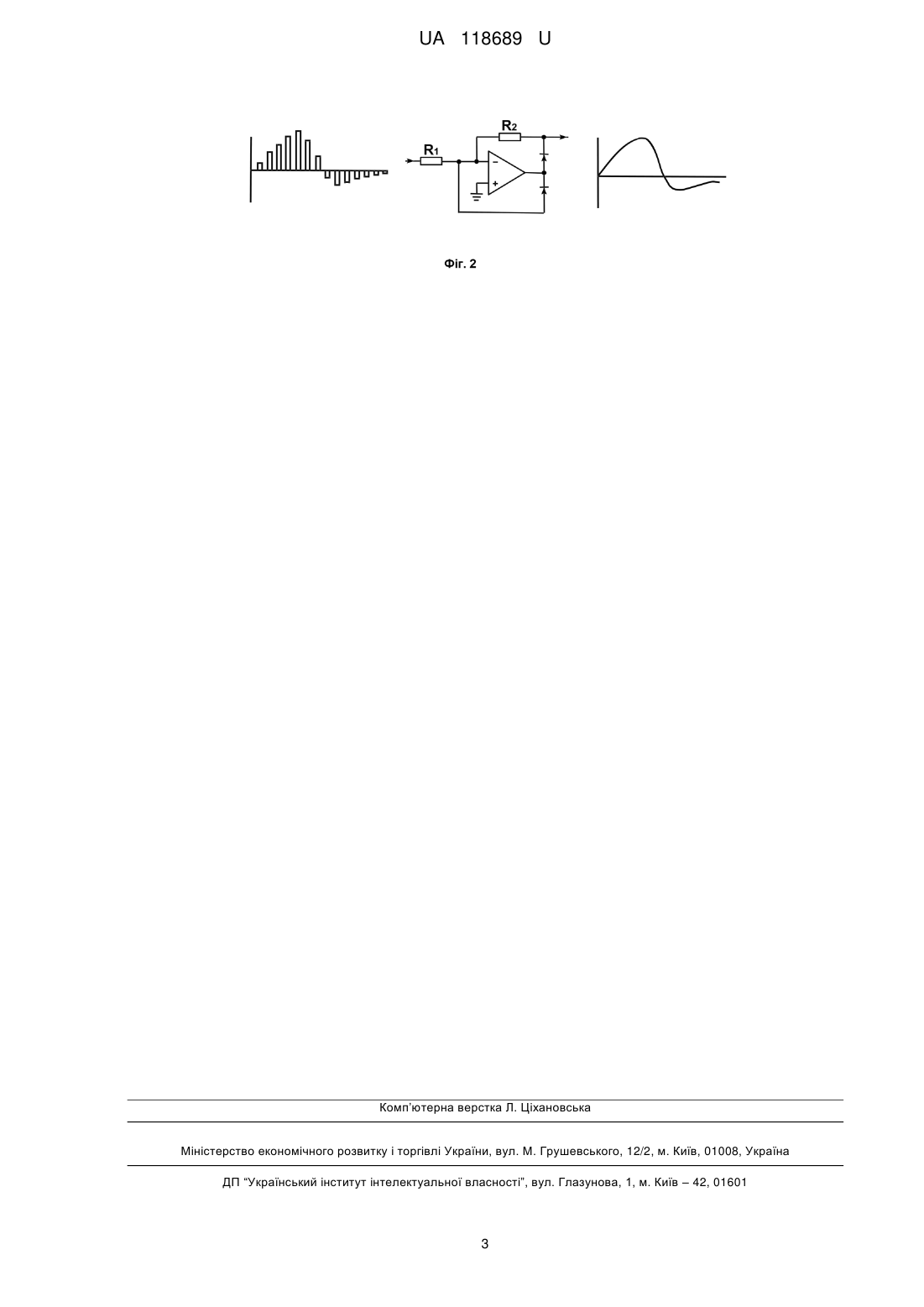
Реферат: Магнітоіндукційний перетворювач має корпус, пасивний індуктор, активний індуктор, друковану плату. Додатково перетворювач має центр ваги, пружину, масу та маятник. Пасивний індуктор через маятник з'єднаний з масою. Активний індуктор розташований на друкованій платі, яка прикріплена до корпусу. UA 118689 U (12) UA 118689 U UA 118689 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вимірювальної техніки та може знайти застосування у реєструвальній апаратурі з метою підвищення точності та інформативності вимірювань деформацій земної кори. Перетворювач може бути використаний у геофізичних дослідженнях для виявлення провісників землетрусів, прогнозування та попередження природних катастроф. У даний час відомо, що значні та відносно швидкі зміни деформацій у геологічному середовищі слугують індикатором його активності. Тому забезпечення надійного високоточного оперативного моніторингу зміни напружено-деформаційного стану середовища є актуальним завданням. Відомо про електромагнітний метод вимірювання для дослідження зміщень, в якому величина індукованого вихідного електричного сигналу використовується для виміру швидкості, що є похідною положення у часі. [Reinhold I. Velocity profile influence on electromagnetic flowmeter accuracy/ I. Reinhold // Proc. FLOMEKO. - 1978. - Netherland. - P. 181-185., Большаков В. Б., Косач Н. И., Марфенко И. В., Панфилов О Ф. Электромагнитный метод измерения скорости жидкостных потоков // Український метрологічний журнал. - 1997. - № 4. - С. 43-46.] Напруга, індукована у дротовій котушці, що рухається в магнітному полі, пропорційна швидкості зміни магнітного потоку. При цьому, відповідно, вимірюється або індукована змінна напруга, або величина струму в котушці. Недоліком такої методики є невисокий рівень вимірюваної величини (в межах одиниць мілівольт) та чутливість до температури навколишнього середовища, що викликає помилку близько 5 % в реальному сигналі у результаті коливання діючого значення індуктивності та внутрішнього опору базової вимірювальної котушки за рахунок великої кількості витків у ній. Найближчим до запропонованої корисної моделі за технічними основами і схожістю результатів є "Процесор корельованих сигналів" [Феєр К. Бездротовий цифровий зв'язок. Методи модуляції та розширення спектру. Пер. з англ. - М.: Радіо і зв'язок, 2000.], де для підвищення енергетичної ефективності модульованих сигналів вводиться взаємна кореляція між символами, що передаються; при цьому зменшення міжсимвольних завад здійснюється за рахунок використання фільтра чи коректора. Взаємна кореляція між індуктивного перетворювача виконується наступним чином: із датчика СМЗ-КВ (комплекс високочутливих сейсмічних датчиків) демонтується вимірювальна котушка, до дна корпусу кріпиться з притиском гвинтом друкована плата з приєднаним активним індуктором, який приєднується до друкованої плати. До переваг процесора корельованих сигналів (як найближчого аналога запропонованого пристрою) можна віднести надширокий динамічний діапазон, одновитковий соленоїд, завадостійкість та низьку термочутливість, стабілізація параметрів у широкому діапазоні температур завдяки використанню зворотного зв'язку. В той же час пристроям з використанням процесора корельованих сигналів властиві певні недоліки, що обмежують область його використання. До них належать необхідність забезпечення безперервного електроживлення та володіння навиками програмування мікропроцесора. В основу корисної моделі поставлена задача підвищення точності та інформативності вимірювань сейсмічної активності й деформацій у земній корі. Поставлена задача вирішується в магнітоіндукційному перетворювачі, який має корпус, пасивний індуктор, активний індуктор, друковану плату, згідно з корисною моделлю, додатково має центр ваги, пружину, масу та маятник, при цьому пасивний індуктор через маятник з'єднаний з масою, а активний індуктор розташований на друкованій платі, яка прикріплена до корпусу. У нашому пристрої реєстрації така задача вирішується наступним способом: у короткому контурі (активному індукторі) за допомогою мікропроцесора створюється сигнал спеціальної форми (високо стабільний за частотою та амплітудою), а у вимірювальному контурі зберігаючи задану форму під впливом переміщення міняється амплітуда індукованого сигналу відносно встановленого попереднього рівня. Миттєве значення амплітуди вихідного сигналу згідно із методом амплітудно-імпульсної модуляції (АІМ) є пропорційне швидкості зміни відстані між контурами. Діючий макет конструктивно складається з друкованої плати і двох індукторів: активного та пасивного. Амплітуда і форма послідовності імпульсів у пасивному індукторі забезпечується процесором і становить 1600 мВ з частотою 300 кГц. Для роботи на такій частоті кількість витків дротової котушки активного індуктора становить один виток. Це забезпечує високу термостабільність і малий розкид параметрів для серії пристроїв. Перелік фігур креслення. Запропонований магнітоіндукційний перетворювач наведений на кресленнях, на яких зображено: 1 UA 118689 U 5 10 15 20 25 30 Фіг. 1 - пристрій з магнітоіндукційним перетворювачем. Фіг. 2 - можливий варіант схеми для декодування вихідного сигналу з робочої котушки перетворювача. Крім того на фіг. 1 умовно позначено: l1, l2 - плечі зрівноважувальної сили базового давача СМ3-КВ. Магнітоіндукційний перетворювач складається з корпусу 1, центра ваги 2, пружини 3, маси 4, маятника 5, пасивного індуктора 6, активного індуктора 7, друкованої плати 8. Монтаж магнітоіндукційного перетворювача виконується таким чином: із корпусу давача СМ3- КВ демонтується вимірювальна базова котушка та постійний магніт, до дна корпусу 1 кріпиться з притиском гвинтом друкована плата 8 з приєднаним активним індуктором 7; до кінця плеча вимірювального маятника закріплюється пасивний індуктор 6, який приєднується до схеми демодулятора АІМ (фіг. 2) на друкованій платі 8. Створення такої конструкції магнітоіндукційного перетворювача підвищує точність виміру сейсмічної активності, так як усувається необхідність підсилення сигналу у сотні раз (у базовій конструкції підсилення становить мінімум 140 разів). Основний принцип, на якому засновано дискретну передачу аналогового сигналу, відображено у теоремі Шеннона про вибірку. Відповідно до цієї теореми, форма аналогового сигналу з обмеженим спектром повністю описується вибіркою його амплітуд, зі швидкістю, рівній подвоєній максимальній частоті сигналу. Таким чином, можна передавати значення амплітуди аналогового сигналу (цифровим способом) тільки в моменти часу, які розділено інтервалами 1/2/mах безперервної модуляції. В амплітудно-імпульсній модуляції (АІМ) послідовність імпульсів із амплітудами, які пропорційні сигналу, передається через регулярні проміжки часу та демодулюється активним півперіодним модулем (фіг. 2). Відповідно, при тактовій частоті імпульсів 300 кГц (формує мікропроцесор), максимальна частота вимірювання становитиме 149 кГц, що значно перевищує сейсмічний діапазон. Модернізований за наведеним вище принципом промисловий СМ3-КВ із відомими резонансними характеристиками коливального вимірювального плеча (фіг. 2), крім швидкості переміщення передбачає контроль переміщення та зміщення відносно заданого початкового рівня. Використання запропонованої нової конструкції магнітоіндукційного перетворювача у геофізичних дослідженнях дозволить підвищити точність та інформативність вимірювання деформацій у земній корі і застосовувати типові сейсмічні приймачі та мікропроцесорних технологій, що зменшить розкид параметрів та вартість обслуговування апаратури. 35 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 Магнітоіндукційний перетворювач, який має корпус, пасивний індуктор, активний індуктор, друковану плату, який відрізняється тим, що додатково має центр ваги, пружину, масу та маятник, при цьому пасивний індуктор через маятник з'єднаний з масою, а активний індуктор розташований на друкованій платі, яка прикріплена до корпусу. 2 UA 118689 U Комп’ютерна верстка Л. Ціхановська Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01P 13/00, G01K 7/00
Мітки: перетворювач, магнітоіндукційний
Код посилання
<a href="https://ua.patents.su/5-118689-magnitoindukcijjnijj-peretvoryuvach.html" target="_blank" rel="follow" title="База патентів України">Магнітоіндукційний перетворювач</a>
Імпульсно-цифровий перетворювач
Номер патенту: 28237
Опубліковано: 26.11.2007
Автор: Голуб Владислав Сергійович
МПК: H03M 1/00
Мітки: перетворювач, імпульсно-цифровий
Формула / Реферат:
1. Імпульсно-цифровий перетворювач, що містить перетворювач квантованого імпульсно-модульованого сигналу в цифровий і керується імпульсами квантування та дискретизації з частотами fТ та fД = fТ/2N відповідно, де N - кількість розрядів цифрового сигналу, який відрізняється тим, що вхід перетворювача квантованого імпульсно-модульованого сигналу підключено до джерела квантованого широтно-імпульсного сигналу.2. Імпульсно-цифровий...
Паралельний аналого-цифровий перетворювач
Номер патенту: 11757
Опубліковано: 16.01.2006
Автори: Бортник Сергій Генадійович, Бортник Генадій Григорович, Стальченко Олександр Володимирович
МПК: H03M 1/12
Мітки: аналого-цифровий, паралельний, перетворювач
Формула / Реферат:
Паралельний аналого-цифровий перетворювач, який містить 2m-n-l компараторів старших розрядів, малорозрядний паралельний аналого-цифровий перетворювач, виходи якого з'єднані з інформаційними входами елементів пам'яті, а виходи 2m-n-l компараторів старших розрядів з'єднані з інформаційними входами n елементів пам'яті через елемент І-АБО, виходи елементів пам'яті під'єднані до розрядних шин, перші входи 2m-n-l компараторів старших розрядів і...
Гідроакустичний перетворювач
Номер патенту: 87031
Опубліковано: 10.06.2009
Автори: Шамарін Юрій Євгенович, Шамарін Олексій Юр'євич, Федоренко Людмила Іллівна, Ільчевська Тамара Григорівна
МПК: H04R 17/00
Мітки: перетворювач, гідроакустичний
Формула / Реферат:
Гідроакустичний перетворювач, що містить активний елемент і герметизуючу оболонку, який відрізняється тим, що на герметизуючій оболонці нанесена захисна оболонка, яка виконана з поверхнево-активної речовини, а саме синтанолу - ДС-10.
Електроакустичний перетворювач
Номер патенту: 108924
Опубліковано: 10.08.2016
Автори: Бондаренко Юлія Юріївна, Заїка Василь Михайлович
МПК: H04R 17/00
Мітки: електроакустичний, перетворювач
Формула / Реферат:
Електроакустичний перетворювач, який містить чотири пари електродів, який відрізняється тим, що п'єзоелемент виконано у вигляді еліпсу з пласкими гранями.
Електроакустичний перетворювач
Номер патенту: 56945
Опубліковано: 25.01.2011
Автори: Сотула Жанна Василівна, Шарапов Валерій Михайлович
МПК: H04R 17/00
Мітки: електроакустичний, перетворювач
Формула / Реферат:
Електроакустичний перетворювач, що містить мономорфний або біморфний п'єзоелемент з двома електродами, вхідний та загальний проводи, який відрізняється тим, що в перетворювач введено котушку індуктивності, котра з'єднана з загальним електродом п'єзоелемента та загальним проводом перетворювача, причому котушка індуктивності разом з міжелектродною ємністю п'єзоелемента створює коливальний контур, причому резонансна частота цього контуру...
Попередній патент: Генератор електричної енергії для стрілецької зброї
Наступний патент: Заготовка для пілігримової прокатки труб
Випадковий патент: Свердловинний заряд