Вагонні ваги з визначенням повздовжнього та поперечного відхилень центра ваги вагона
Формула / Реферат
Вагонні ваги з визначенням повздовжнього та поперечного відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, чотири суматори, мікропроцесорний контролер; мікропроцесорний контролер має чотири аналого-цифрових перетворювачі, клавіатуру, індикатор, енергонезалежну пам'ять для зберігання результатів зважувань та значень величин між осями ваговимірювальних датчиків, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, які відрізняються тим, що енергонезалежна пам'ять виконана з можливістю зберігання розрахунку програмним обчисленням похибки фактично отриманих значень відхилення центра ваги вагонів від прийнятих допустимих значень, яке за рахунок введення додаткових параметрів забезпечує більш точний розрахунок повздовжнього та поперечного відхилень центра ваги вагона.
Текст
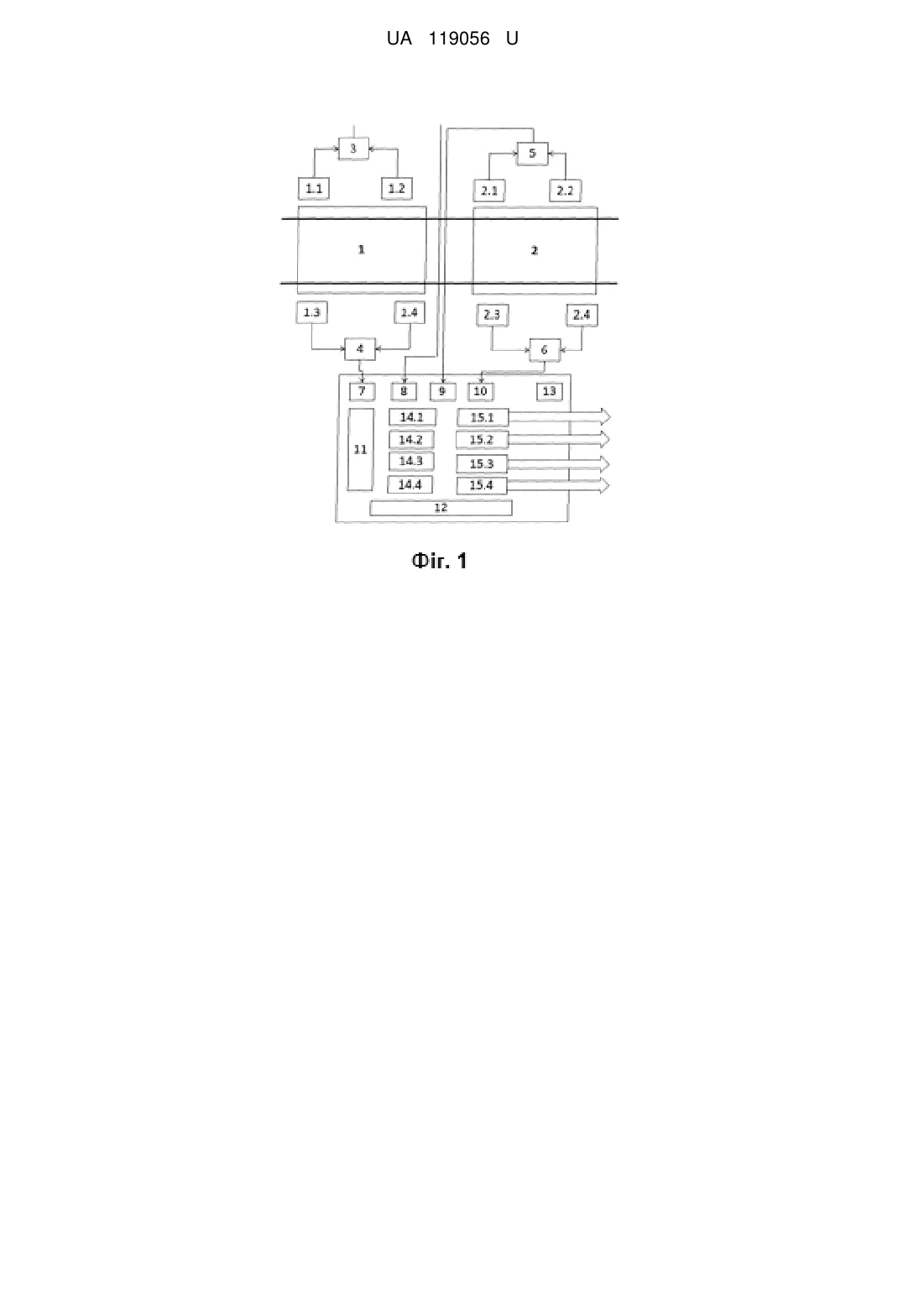
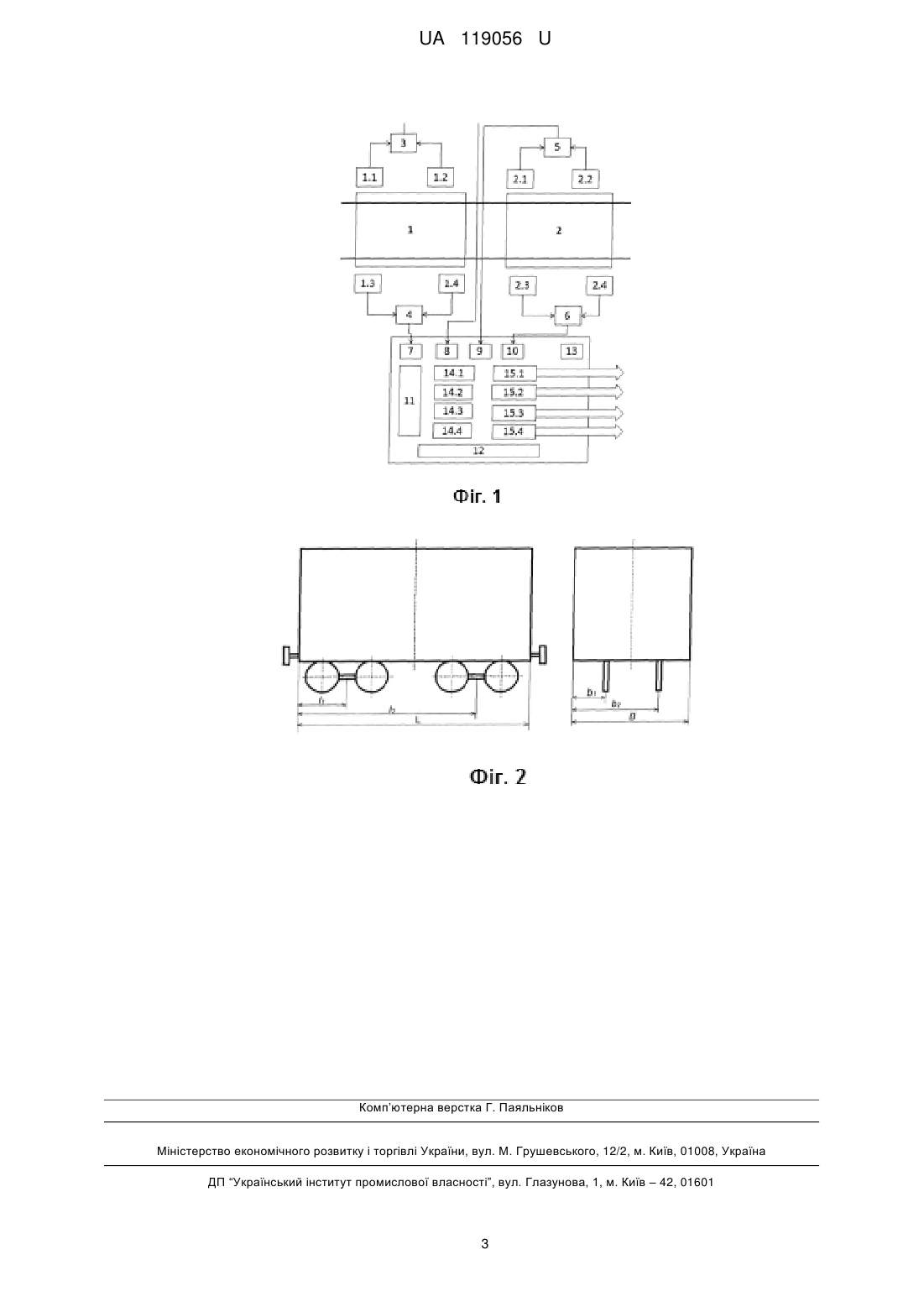
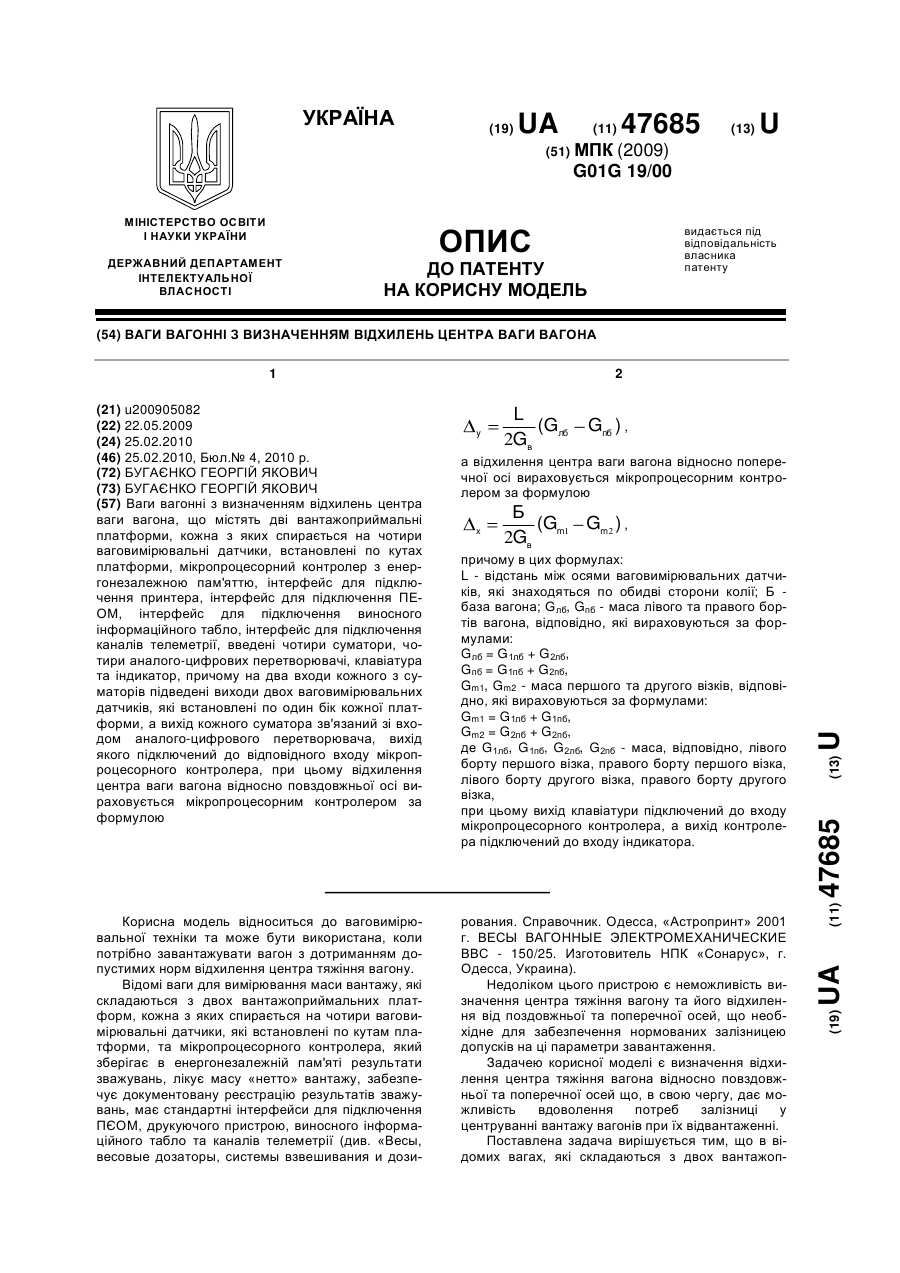
Реферат: Вагонні ваги з визначенням повздовжнього та поперечного відхилень центра ваги вагона містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, чотири суматори, мікропроцесорний контролер. Мікропроцесорний контролер має чотири аналого-цифрових перетворювачі, клавіатуру, індикатор, енергонезалежну пам'ять для зберігання результатів зважувань та значень величин між осями ваговимірювальних датчиків, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії. Енергонезалежна пам'ять виконана з можливістю зберігання розрахунку програмним обчисленням похибки фактично отриманих значень відхилення центра ваги вагонів від прийнятих допустимих значень, яке за рахунок введення додаткових параметрів забезпечує більш точний розрахунок повздовжнього та поперечного відхилень центра ваги вагона. UA 119056 U (12) UA 119056 U UA 119056 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі ваговимірювальної техніки і може бути використана, наприклад, при зважуванні залізничних вагонів. Відомий аналог до корисної моделі, що заявляється, є ваги вагонні з визначенням відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких на чотири ваговимірювальні датчики, встановлені по кутках платформи, мікропроцесорний контролер з енергонезалежною пам'яттю, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, чотири суматори, чотири аналого-цифрових перетворювачі, клавіатуру та індикатор, причому на два входи кожного з суматорів підведені виходи ваговимірювальних датчиків, які встановлені по один бік кожної платформи, а вихід кожного зв'язаний з входом аналого-цифрового перетворювача, вихід якого підключений до відповідного входу мікропроцесорного контролера [патент України на корисну модель № 47685 U, опуб. 2010.02.25, бюл. № 4, МПК G01G19/00]. Однак ці ваги також мають недоліки. Насамперед, при зважуванні вагонів згаданими вагами виникає необхідність введення з клавіатури значень бази вагона та відстань між осями ваговимірювальних датчиків, що знаходяться по обидві сторони колії, при кожному зважуванні, що призводить до значних витрат часу та підвищує вірогідність помилок, пов'язаних з людським чинником. Найбільш близьким аналогом до корисної моделі є вагонні ваги з визначенням відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, чотири суматори, чотири аналого-цифрових перетворювачі, клавіатуру, індикатор, мікропроцесорний контролер. Мікропроцесорний контролер має енергонезалежну пам'ять для зберігання результатів зважувань, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії. Додатково мікропроцесорний контролер обладнаний енергонезалежною пам'яттю для зберігання значень величин між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії і, за необхідності, бази вагону [патент України на корисну модель № 75619 U, опуб. 2012.12.10, бюл. № 23, МПК G01G19/00]. Однак ці ваги теж мають недоліки. Програмне обчислення даних ваг має не точності в розрахунках, а також нема можливості порівняти фактично отримані значення з допустимим. Задачею корисної моделі є підвищення точність розрахунків повздовжнього та поперечного відхилень центра ваги вагона та забезпечити розрахунок похибки фактично отриманих значень від прийнятих допустимих значень. Поставлена задача вирішується тим, що ваги, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, чотири суматори, мікропроцесорний контролер; мікропроцесорний контролер має чотири аналого-цифрових перетворювачі, клавіатуру, індикатор, енергонезалежну пам'ять для зберігання результатів зважувань та значень величин між осями ваговимірювальних датчиків, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, згідно з корисною моделлю, енергонезалежна пам'ять виконана з можливістю зберігання розрахунку програмним обчисленням похибки фактично отриманих значень відхиленняцентра ваги вагонів від прийнятих допустимих значень, яке за рахунок введення додаткових параметрів забезпечує більш точний розрахунок повздовжнього та поперечного відхилень центра ваги вагона. На фіг. 1 показана структурна блок-схема вагонних ваг з визначенням повздовжнього та поперечного відхилень центра ваги вагона. Вагонні ваги з визначенням похибки фактичних значень відхилень центра ваги вагона від допустимих містять дві вантажоприймальні платформи 1 та 2, кожна з яких спирається на чотири ваговимірювальні датчики 1.1, 1.2, 1.3, 1.4 та 2.1, 2.2, 2.3, 2.4, чотири суматори 3, 4 та 5, 6, мікропроцесорний контролер 13. Мікропроцесорний контролер 13 має чотири аналогоцифрових перетворювачі 7, 8, 9, 10, клавіатуру 11, індикатор 12, енергонезалежну пам'ять для зберігання результатів зважувань 14.1, значень величин між осями ваговимірювальних датчиків 14.2 та 14.3 та допустимих значень повздовжнього та поперечного відхилень центра ваги вагона 14.4, інтерфейс для підключення принтера 15.1, інтерфейс для підключення ПЕОМ 15.2, інтерфейс для підключення виносного інформаційного табло 15.3, інтерфейс для підключення каналів телеметрії 15.4. Вагонні ваги працюють наступним чином. Кожен візок вагона розміщується на відповідній платформі 1 та 2, а сигнали від датчиків ваговимірювальних 1.1-1.4 та 2.1-2.4 додаються попарно кожним відповідним суматором 3-6. 1 UA 119056 U 5 10 15 20 25 Таким чином, на виході суматора 3 виникає сигнал, який є сумою сигналів датчиків 1.1 та 1.2. Ця сума пропорційна масі лівої сторони першого візка. На виході суматора 2 виникає сигнал, який є сумою сигналів датчиків 1.3. та 1.4. Ця сума пропорційна масі правої сторони першого візка. На виході суматора 5 виникає сигнал, який є сумою сигналів датчиків 2.1 та 2.2. Ця сума пропорційна масі лівої сторони другого візка. На виході суматора 6 виникає сигнал, який є сумою сигналів датчиків 2.3 та 2.4. Ця сума пропорційна масі право сторони другого візка. Сигнали з суматорів 3-6 находять на аналого-цифрові перетворювачі 7-10, відповідно, на виході кожного з яких з'являється цифровий код, що є числовим еквівалентом величин відповідних сум. Мікропроцесорний контролер 13 підсумовує значення величин з виходів аналого-цифрових перетворювачів 7 та 8, в результаті чого отримує значення маси першого візка mв1 , що пропорційна масі першого візка, а також значення величин з виходів аналого-цифрових перетворювачів 9 та 10, що дає значення величин m в2 , що пропорційна масі другого візка. Також мікропроцесорний контролер 13 обчислює суму значень з виходів аналого-цифрових перетворювачів 8 та 9, в результаті чого отримує значення m c1 , що пропорційне масі лівої сторони візка, та суму значень з виходів аналого-цифрових перетворювачів 7 та 10, що дає значення mc 2 , що пропорційне масі правої сторони візка. Мікропроцесорний контролер 13 обчислює повздовжнє відхилення пов з від осі за формулою: L m mв1 2 , пов з в1 1 2 m общ - довжина кузова вагона, мм; L m общ - загальна маса вантажу у вагоні, т; mв1 , m в2 - маса вантажу у першому та другому візках, т; 1 , 2 - відстань центрів ваги вантажу від торцевого борта кузова вагона, мм. На фіг. 2 показано схематичне зображення вагона. Обчислення поперечного відхилення b non від осі розраховується за формулою: B m c1b1 m c1b 2 , 2 m общ - ширина кузова вагона, мм; B mb 1 , mb 2 - маса вантажу лівої та правої сторони візка, т; b 1 , b 2 - відстань центрів ваги вантажу від бокового борту кузова вагона, мм. Далі вагар вносить через клавіатуру 11 значення висоти загрузки вагона, яке необхідне для розрахунку допустимого значення поперечного відхилення осі. Програмне обчислення мікропроцесорного контролера 13 проводить порівняння фактичних даних з допустимими та виводить на індикатор значення повздовжнього та поперечного відхилень центра ваги вагона, а також похибки фактичних значень відхилень центра ваги вагона від допустимих. Допустимі значення вносяться одноразово та зберігаються в пам'яті 14.4. b non 30 35 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 Вагонні ваги з визначенням повздовжнього та поперечного відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, чотири суматори, мікропроцесорний контролер; мікропроцесорний контролер має чотири аналого-цифрових перетворювачі, клавіатуру, індикатор, енергонезалежну пам'ять для зберігання результатів зважувань та значень величин між осями ваговимірювальних датчиків, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, які відрізняються тим, що енергонезалежна пам'ять виконана з можливістю зберігання розрахунку програмним обчисленням похибки фактично отриманих значень відхилення центра ваги вагонів від прийнятих допустимих значень, яке за рахунок введення додаткових параметрів забезпечує більш точний розрахунок повздовжнього та поперечного відхилень центра ваги вагона. 2 UA 119056 U Комп’ютерна верстка Г. Паяльніков Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01G 19/00, G01G 19/04, G01G 19/02
Мітки: вагона, визначенням, поперечного, ваги, відхилень, повздовжнього, вагонні, центра
Код посилання
<a href="https://ua.patents.su/5-119056-vagonni-vagi-z-viznachennyam-povzdovzhnogo-ta-poperechnogo-vidkhilen-centra-vagi-vagona.html" target="_blank" rel="follow" title="База патентів України">Вагонні ваги з визначенням повздовжнього та поперечного відхилень центра ваги вагона</a>
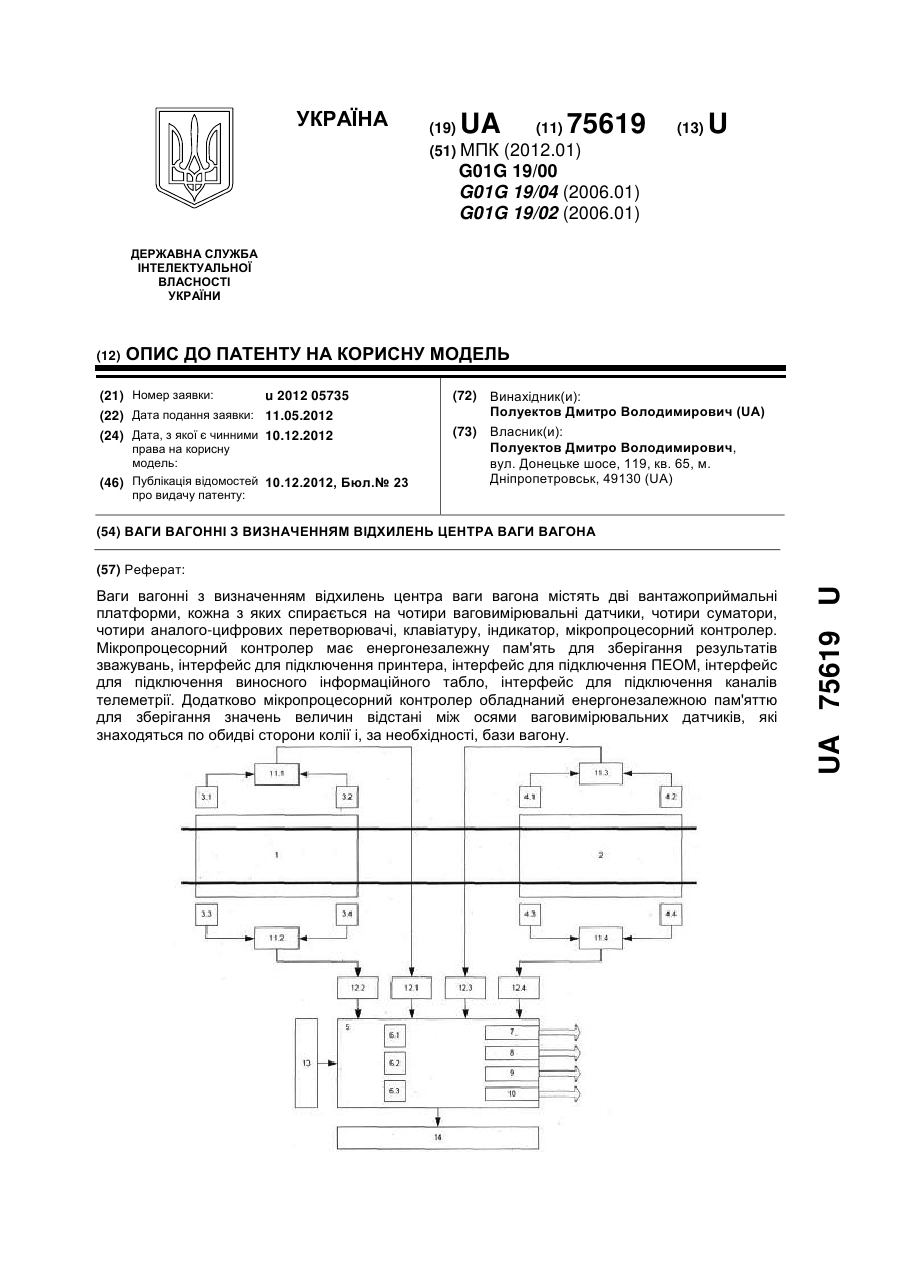
Ваги вагонні з визначенням відхилень центра ваги вагона
Номер патенту: 47685
Опубліковано: 25.02.2010
Автор: Бугаєнко Георгій Якович
МПК: G01G 19/00
Мітки: ваги, вагонні, вагона, відхилень, визначенням, центра
Формула / Реферат:
Ваги вагонні з визначенням відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, встановлені по кутах платформи, мікропроцесорний контролер з енергонезалежною пам'яттю, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, введені чотири суматори,...
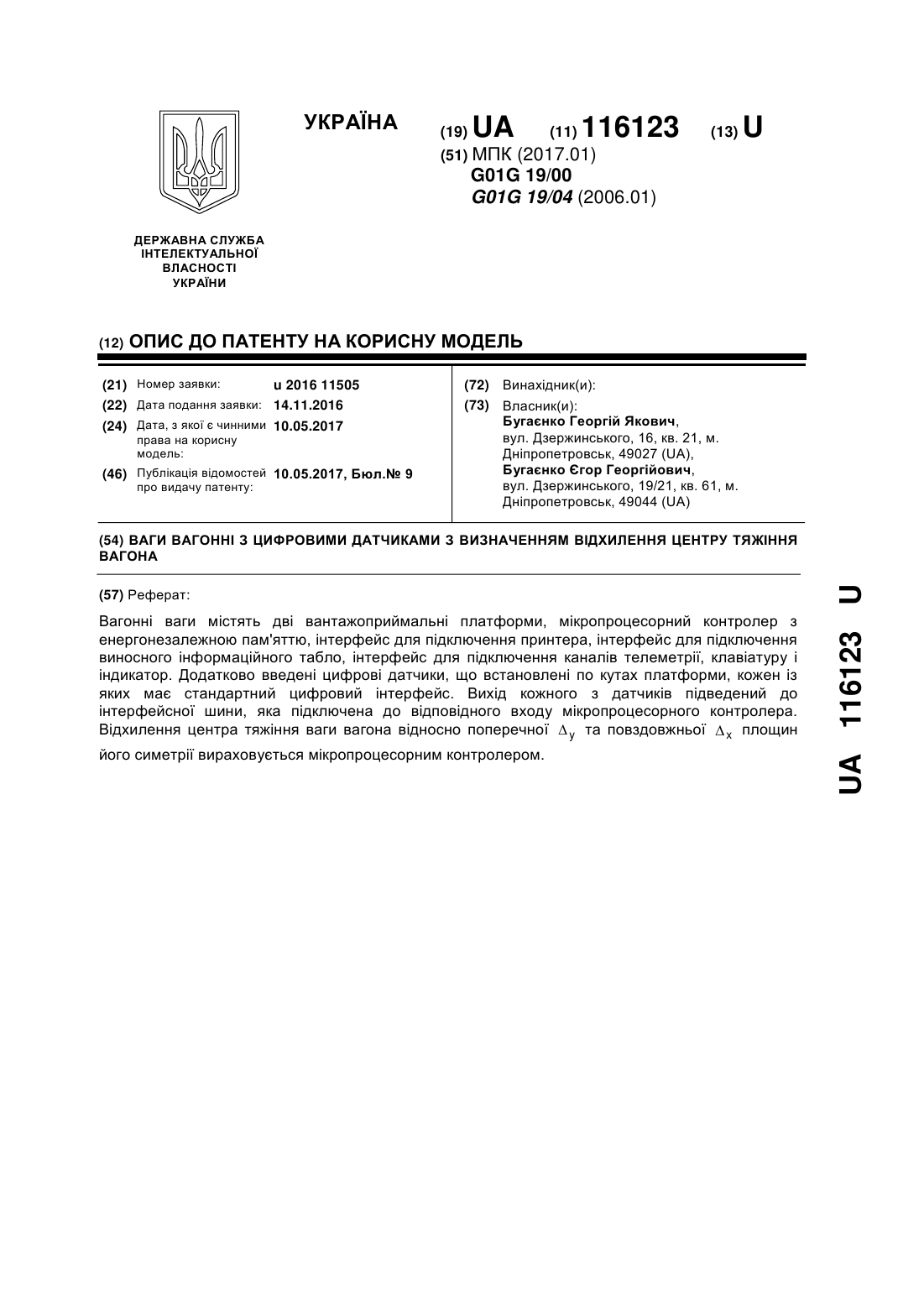
Ваги вагонні з визначенням відхилень центра ваги вагона
Номер патенту: 75619
Опубліковано: 10.12.2012
Автор: Полуектов Дмитро Володимирович
МПК: G01G 19/02, G01G 19/00, G01G 19/04
Мітки: ваги, відхилень, визначенням, вагонні, центра, вагона
Формула / Реферат:
Ваги вагонні з визначенням відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, що встановлені по кутах платформ, чотири суматори, чотири аналого-цифрових перетворювачі, клавіатуру, індикатор, причому на два входи кожного з суматорів підведені виходи двох ваговимірювальних датчиків, які встановлені по один бік кожної платформи, а вихід кожного суматора зв'язаний...
Ваги вагонні з цифровими датчиками з визначенням відхилення центру тяжіння вагона
Номер патенту: 116123
Опубліковано: 10.05.2017
Автори: Бугаєнко Єгор Георгійович, Бугаєнко Георгій Якович
МПК: G01G 19/04, G01G 19/00
Мітки: відхілення, датчиками, цифровими, тяжіння, визначенням, вагонні, вагона, ваги, центру
Формула / Реферат:
Вагонні ваги, що містять дві вантажоприймальні платформи, мікропроцесорний контролер з енергонезалежною пам'яттю, інтерфейс для підключення принтера, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, клавіатуру і індикатор, які відрізняються тим, що в них введені цифрові датчики, що встановлені по кутах платформи, кожен із яких має стандартний цифровий інтерфейс, при цьому вихід кожного з...
Ваги вагонні дво- або триплатформні з визначенням відхилення центру тяжіння вагона
Номер патенту: 51330
Опубліковано: 12.07.2010
Автори: Бугаєнко Георгій Якович, Бугаєнко Єгор Георгійович, Бугаєнко Максим Георгійович
МПК: G01G 19/00
Мітки: відхілення, визначенням, ваги, вагона, центру, триплатформні, вагонні, дво, тяжіння
Формула / Реферат:
Ваги вагонні дво- або триплатформні з визначенням відхилень центру тяжіння вагона, які мають дві або три платформи, кожна з яких спирається на чотири ваговимірювальні датчики, мікропроцесорний контролер, в складі якого є енергонезалежна пам'ять, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло та інтерфейс для підключення каналів телеметрії, які відрізняються тим, що...
Спосіб визначення відхилення центра тяжіння вантажу у вагоні відносно площин симетрії вагона
Номер патенту: 100536
Опубліковано: 27.07.2015
Автори: Бугаєнко Єгор Георгійович, Бугаєнко Георгій Якович
МПК: G01G 19/08
Мітки: вагона, спосіб, вагони, відносної, центра, визначення, площин, відхілення, симетрії, вантажу, тяжіння
Формула / Реферат:
Спосіб вимірювання відхилення центра тяжіння вантажу у вагоні відносно площини симетрії вагона, який реалізують за допомогою вагонних ваг, що мають функцію вимірювання відхилення центра тяжіння вагона відносно його площин симетрії, який полягає в тому, що на першому етапі вимірюють відхилення центра тяжіння маси-тари порожнього вагона відносно його повздовжньої та...
Попередній патент: Спосіб створення травостою козлятнику східного
Наступний патент: Система для обробляння даних з використанням універсального обчислювального елемента (уое)
Випадковий патент: Пристрій для вимірювання вологості матеріалів