Спосіб визначення відхилення центра тяжіння вантажу у вагоні відносно площин симетрії вагона
Номер патенту: 100536
Опубліковано: 27.07.2015



Формула / Реферат
Спосіб вимірювання відхилення центра тяжіння вантажу у вагоні відносно площини симетрії вагона, який реалізують за допомогою вагонних ваг, що мають функцію вимірювання відхилення центра тяжіння вагона відносно його площин симетрії, який полягає в тому, що на першому етапі вимірюють відхилення центра тяжіння маси-тари порожнього вагона відносно його повздовжньої ![]() та поперечної
та поперечної ![]() площин симетрії, на другому етапі вимірюють відхилення центра тяжіння маси-брутто завантаженого вагона відносно його повздовжньої
площин симетрії, на другому етапі вимірюють відхилення центра тяжіння маси-брутто завантаженого вагона відносно його повздовжньої ![]() та поперечної
та поперечної ![]() площин симетрії, а на третьому етапі вираховують відхилення центра тяжіння маси-нетто у вагоні відносно його повздовжньої
площин симетрії, а на третьому етапі вираховують відхилення центра тяжіння маси-нетто у вагоні відносно його повздовжньої ![]() та поперечної
та поперечної ![]() площин симетрії за формулами:
площин симетрії за формулами:
![]() ,
,
![]() ,
,
а різницю у завантаженні візків за формулою:
![]() ,
,
де ![]() та
та ![]() - маса-брутто першого та другого візків;
- маса-брутто першого та другого візків;
![]() та
та ![]() - маса-тара першого та другого візків, відповідно.
- маса-тара першого та другого візків, відповідно.
Текст
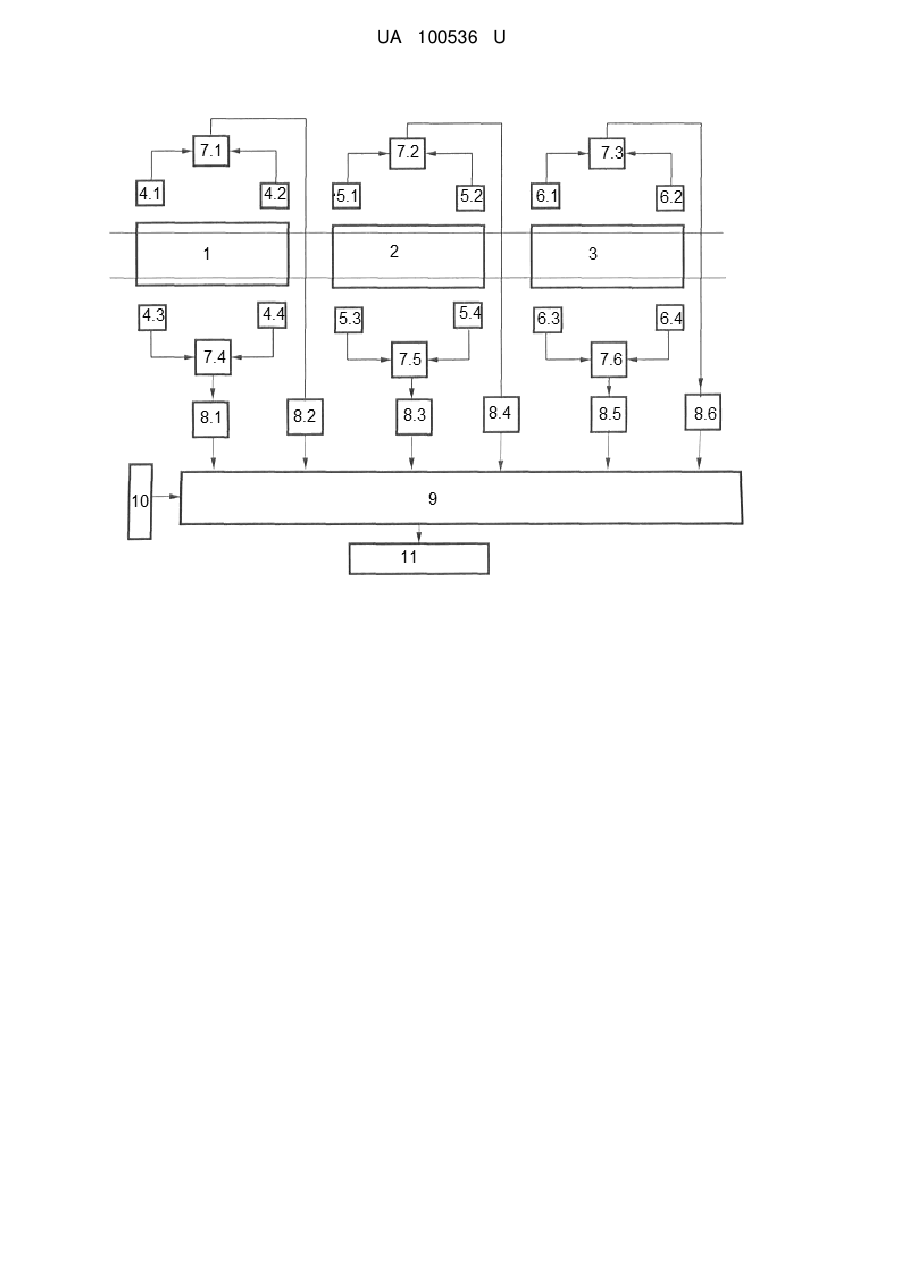
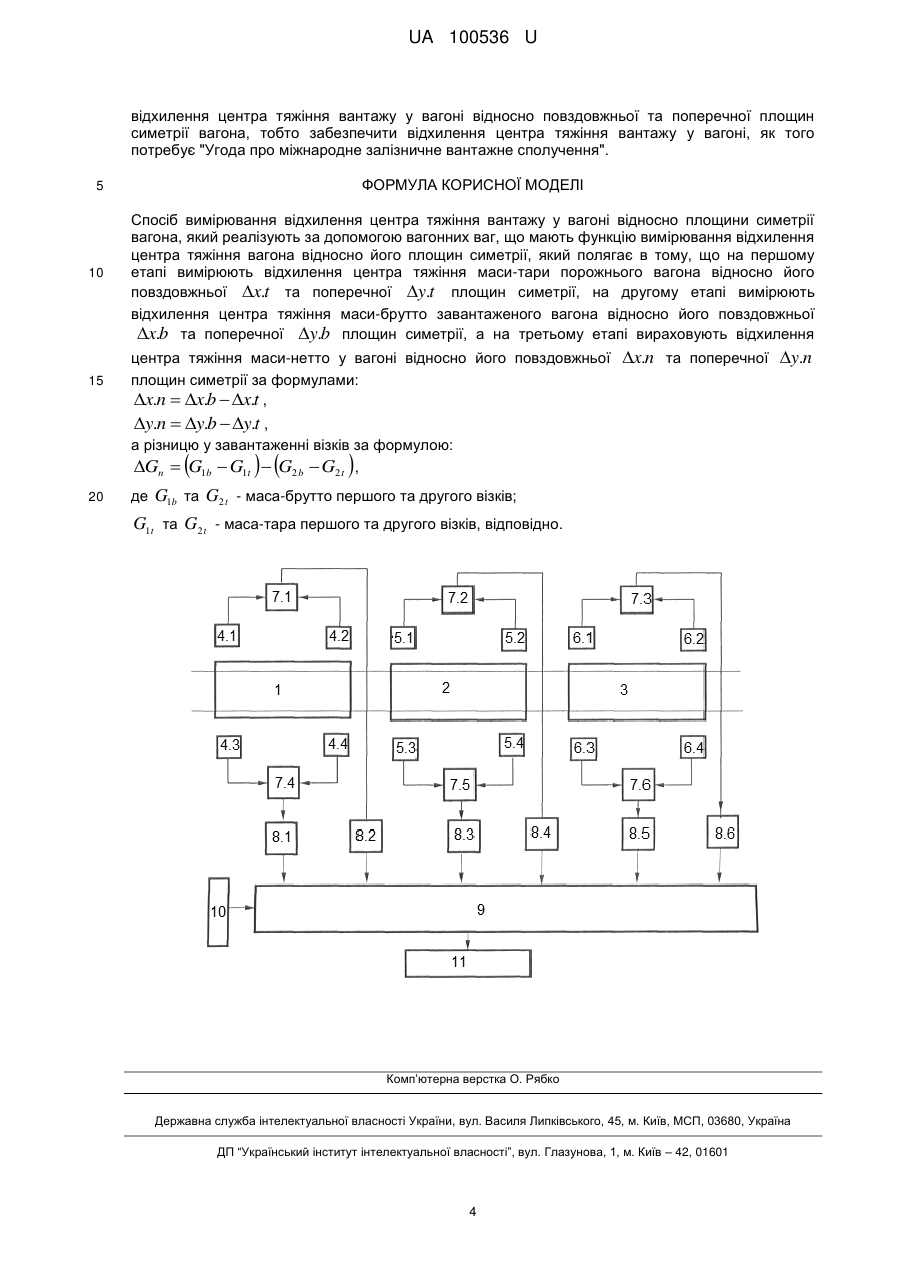
Реферат: Спосіб вимірювання відхилення центра тяжіння вантажу у вагоні відносно площини симетрії вагона реалізують за допомогою вагонних ваг. На першому етапі вимірюють відхилення центра тяжіння маси-тари порожнього вагона відносно його повздовжньої та поперечної площин симетрії; на другому етапі вимірюють відхилення центра тяжіння маси-брутто завантаженого вагона відносно його повздовжньої та поперечної площин симетрії; на третьому етапі вираховують відхилення центра тяжіння маси-нетто у вагоні відносно його повздовжньої та поперечної площин симетрії та різницю у завантаженні візків за відповідними формулами. UA 100536 U (54) СПОСІБ ВИЗНАЧЕННЯ ВІДХИЛЕННЯ ЦЕНТРА ТЯЖІННЯ ВАНТАЖУ У ВАГОНІ ВІДНОСНО ПЛОЩИН СИМЕТРІЇ ВАГОНА UA 100536 U UA 100536 U 5 Корисна модель належить до ваговимірювальної техніки та може бути використана, коли потрібно визначити відхилення центра тяжіння вантажу у вагони відносно повздовжньої та поперечної площин симетрії вагона. Відомі ваги вагонні, які мають функцію визначення відхилення центра тяжіння вагона відносно площин його симетрії (див. патент України № 51330 "Ваги вагонні дво- або триплатформні з визначенням відхилень центра ваги вагона"), при цьому відхилення центра тяжіння вагона відносно його повздовжньої площини симетрії вираховується за формулою: x 10 L Gлб Gпб 2Gв , а відхилення центра тяжіння вагона відносно поперечної площини симетрії вираховується за формулою: y Б G1 G2 2Gв , в яких: Б - база вагона; L - відстань між осями тензодатчиків, які розміщені по різні сторони залізничної колії; Gв - маса вагона; G лб і Gпб - маса лівого та правого бортів вагона; a G1 , G2 15 20 25 30 маса першого та другого візків вагона, які, в свою чергу, обчислюються за формулами: G1 G1лб G1пб , G2 G2 лб G2пб , Gлб G1лб G1лб , Gпб G1лб G2пб , де G1 лб , G1пб , G2 лб , G2 пб - маса, відповідно, лівого борта першого візка, правого борта першого візка, лівого борта другого візка, правого борта другого візка. Недоліком цього способу є невизначеність відхилення центра тяжіння вантажу у вагоні, як того потребує міжнародна нормативна документація (таблиці 9 та 10 додатку 14 Глави 1 "Угоди про міжнародне залізничне вантажне сполучення"). В основу корисної моделі поставлена задача здійснення вимірювання відхилення центра тяжіння вантажу у вагоні. Поставлена задача вирішується за рахунок того, що: - спочатку встановлюють на ваги, які мають функцію вимірювання відхилення центра ваги вагона відносно його площин симетрії, порожній вагон та визначають відхилення центра його тяжіння відносно поперечної x.t та повздовжньої y.t площин симетрії за формулами: L Gлб.t Gпб.t , 2Gв.t Б G1.t G2.t , y.t 2Gв.t x.t в яких: Gв.t - маса-тара порожнього вагона, 35 порожнього вагона, G1.t та G2.t - маса-тара першого та другого візків Gлб .t і Gпб.t - маса-тара лівого та правого бортів порожнього вагона, які, в свою чергу, обчислюються за формулами: G1.t G1лб.t G1пб.t , 40 G2.t G2 лб.t G2пб.t , Gлб.t G1лб .t G2 лб.t , Gпб.t G1лб.t G2пб.t , де G1 лб .t , G1пб.t , G2 лб .t , G2 пб.t - маса-тара, відповідно, лівого борта першого візка, правого борта першого візка, лівого борта другого візка, правого борта другого візка порожнього вагона; - після чого запам'ятовують значення відхилень x.t та y.t у енергонезалежній пам'яті мікропроцесорного контролера, 1 UA 100536 U - потім завантажують вагон вантажем та знову встановлюють його на ті ж самі ваги, де визначають відхилення центра тяжіння завантаженого вагона відносно його поперечної x.b та повздовжньої y.b площин симетрії за формулами: L Gлб.b Gпб.b , 2Gв.b Б G1.b G2.b , y.b 2Gв.b x.b 5 в яких: Gв.b - маса брутто завантаженого вагона, візків завантаженого вагона, 10 G1.b та G2.b - маса брутто першого та другого Gлб .b і Gпб.b - маса брутто лівого та правого бортів завантаженого вагона, які, в свою чергу, обчислюються за формулами: G1.b G1лб .b G1пб.b , G2.b G2 лб .b G2пб.b , Gлб .b G1лб .b G2 лб .b , Gпб.b G1лб .b G2пб.b , де G1 лб .b , G1пб.b , G2 лб .b , G2 пб.b - маса брутто, відповідно, лівого борта першого візка, 15 20 25 30 35 40 правого борта першого візка, лівого борта другого візка, правого борта другого візка завантаженого вагона; - після чого обчислюють відхилення центра тяжіння вантажу у завантаженому вагоні відносно його повздовжньої Δх та поперечної Δу площин симетрії за формулами: x x.b x.t , y y.b y.t . Таким чином, за допомогою запропонованого способу здійснюється визначення відхилення центра ваги саме вантажу у завантаженому вагоні, як того вимагає "Угода про міжнародне залізничне вантажне сполучення". На кресленні наведена структурна схема триплатформних вагонних ваг. Пристрій має три платформи 1, 2 і 3, кожна з яких спирається на чотири датчики, перша - на датчики 4.1, 4.2, 4.3 та 4.4, друга - на датчики 5.1, 5.2, 5.3 та 5.4, третя - на датчики 6.1, 6.2, 6.3 та 6.4, шести суматорів 7.1, 7.2, 7.3, 7.4, 7.5 та 7.6, шести аналого-цифрових перетворювачів 8.1, 8.2, 8.3, 8.4, 8.5 та 8.6, мікропроцесорного контролера 9, який має енергонезалежну пам'ять, клавіатури 10 та індикатора 11. Робота пристрою, який реалізує запропонований спосіб, виконується в три етапи. Етап 1. Порожній вагон встановлюють на ваги, які мають функцію вимірювання відхилення центра тяжіння вагона відносно площин його симетрії, і визначають відхилення центра ваги порожнього вагона відносно його площин симетрії. Для цього сигнали від датчиків, які належать до однієї сторони кожного візка, складаються попарно кожним суматором. На виході кожного суматора виникає сигнал, який є сумою сигналів датчиків, які підведені до його входу. Ця сума, яка пропорційна масі-тара відповідної сторони відповідного візка вагона, перетворюється за допомогою аналого-цифрового перетворювача в цифровий код, який надходить на відповідний вхід мікропроцесорного контролера 7. Таким самим чином на кожному вході мікропроцесорного контролера 7 формується сигнал, пропорційний "масі-тара" відповідної сторони відповідного візка вагона. Мікропроцесорний контролер 7 вираховує відхилення центра його тяжіння відносно поперечної x.t та повздовжньої y.t площин симетрії за формулами: L Gлб .t Gпб.t , 2Gв.t Б G1.t G2.t , y.t 2Gв.t x.t в яких: 2 UA 100536 U Gв.t - маса-тара порожнього вагона, G1.t та G2.t - маса-тара першого та другого візків порожнього вагона, Gлб .t і Gпб.t - маса-тара лівого та правого бортів порожнього вагона, які, в свою чергу, обчислюються за формулами: G1.t G1лб .t G1пб.t , 5 10 15 G2.t G2 лб .t G2пб.t , Gлб .t G1лб .t G2 лб .t , Gпб.t G1лб .t G2пб.t , де G1 лб .t , G1пб.t , G2 лб .t , G2 пб.t - маса-тара, відповідно, лівого борта першого візка, правого борта першого візка, лівого борта другого візка, правого борта другого візка вагона. Етап 2. Навантажений вагон встановлюють на ваги, які мають функцію вимірювання відхилення центра тяжіння вагона відносно площин його симетрії, і визначають відхилення центра ваги завантаженого вагона відносно його площин симетрії. Для визначення відхилення центра тяжіння маси-брутто навантаженого вагона мікропроцесорний контролер 7 вираховує відхилення центра його тяжіння відносно поперечної x.t та повздовжньої y.t площин симетрії за формулами: L Gлб.b Gпб.b , 2Gв.b Б G1.b G2.b , y.b 2Gв.b x.b в яких: Gв.b - маса брутто завантаженого вагона, 20 бортів вагона, Gлб .b і Gпб.b - маса-брутто лівого та правого G1.b і G2.b - маса брутто першого та другого візків вагона, які, в свою чергу, обчислюються за формулами: G1.b G1лб .b G1пб.b , 25 30 35 40 45 G2.b G2 лб .b G2пб.b , Gлб .b G1лб .b G2 лб .b , Gпб.b G1лб .b G2пб.b , де G1 лб .b , G1пб.b , G2 лб .b , G2 пб.b - маса брутто, відповідно, лівого борта першого візка, правого борта першого візка, лівого борта другого візка, правого борта другого візка. Етап 3. Вираховують за допомогою мікропроцесорного контролера 7 відхилення центра тяжіння вантажу (маси-нетто) у навантаженому вагоні відносно поперечної x.n площин симетрії вагона за формулою: x.n x.b x.t ; вираховують за допомогою мікропроцесорного контролера 7 відхилення центра тяжіння вантажу (маси-нетто) у навантаженому вагоні відносно повздовжньої y.n площини симетрії вагона за формулою: y.n y.b y.t ; Вираховують за допомогою мікропроцесорного контролера 7 різницю у завантаженні візків за формулою: Gn G1.b G1.t G2.b G2.t . Результати обчислювань передаються мікропроцесорним контролером 7 до індикатора та відображаються на ньому, що дає можливість оператору контролювати процес завантаження вагона та впливати, при необхідності, на нього. Викладене вище підтверджує наявність причинно-наслідкових зв'язків між сукупністю суттєвих ознак корисної моделі, що заявляється, та технічним результатом, що досягається. На думку автора, технічне рішення, що заявляється, відповідає критерію "корисний ефект", тому що сукупність суттєвих ознак, які характеризують спосіб вимірювання центра тяжіння вантажу навантаженого вагона відносно площин симетрії вагона, дає можливість визначити 3 UA 100536 U відхилення центра тяжіння вантажу у вагоні відносно повздовжньої та поперечної площин симетрії вагона, тобто забезпечити відхилення центра тяжіння вантажу у вагоні, як того потребує "Угода про міжнародне залізничне вантажне сполучення". 5 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 Спосіб вимірювання відхилення центра тяжіння вантажу у вагоні відносно площини симетрії вагона, який реалізують за допомогою вагонних ваг, що мають функцію вимірювання відхилення центра тяжіння вагона відносно його площин симетрії, який полягає в тому, що на першому етапі вимірюють відхилення центра тяжіння маси-тари порожнього вагона відносно його повздовжньої x.t та поперечної y.t площин симетрії, на другому етапі вимірюють відхилення центра тяжіння маси-брутто завантаженого вагона відносно його повздовжньої x.b та поперечної y.b площин симетрії, а на третьому етапі вираховують відхилення 15 центра тяжіння маси-нетто у вагоні відносно його повздовжньої x.n та поперечної площин симетрії за формулами: x.n x.b x.t , y.n y.n y.b y.t , а різницю у завантаженні візків за формулою: Gn G1b G1t G2 b G2 t , 20 де G1b та G2 t - маса-брутто першого та другого візків; G1t та G2 t - маса-тара першого та другого візків, відповідно. Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01G 19/08
Мітки: площин, визначення, вагони, вантажу, центра, спосіб, симетрії, відхілення, тяжіння, відносної, вагона
Код посилання
<a href="https://ua.patents.su/6-100536-sposib-viznachennya-vidkhilennya-centra-tyazhinnya-vantazhu-u-vagoni-vidnosno-ploshhin-simetri-vagona.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення відхилення центра тяжіння вантажу у вагоні відносно площин симетрії вагона</a>
Ваги вагонні дво- або триплатформні з визначенням відхилення центру тяжіння вагона
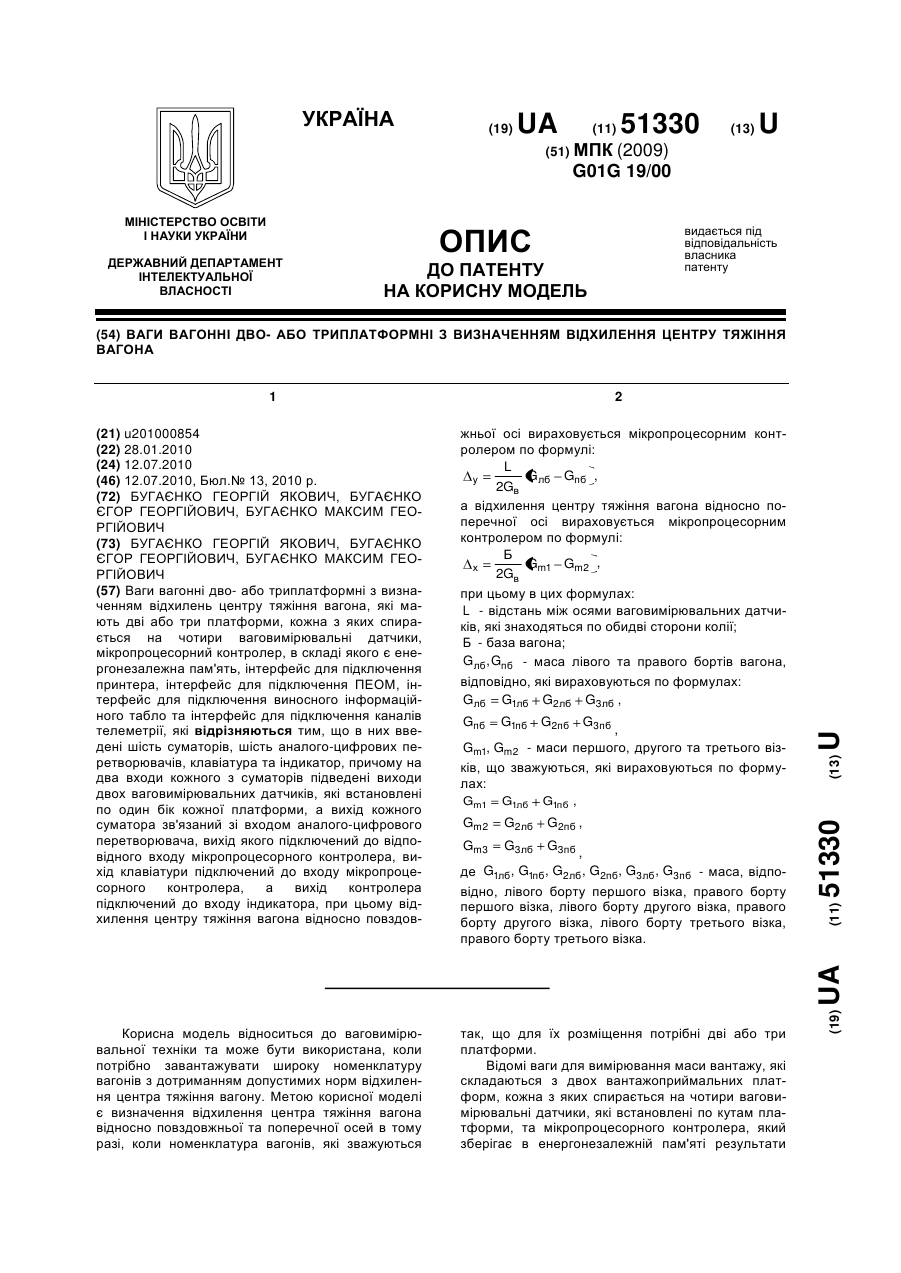
Номер патенту: 51330
Опубліковано: 12.07.2010
Автори: Бугаєнко Максим Георгійович, Бугаєнко Георгій Якович, Бугаєнко Єгор Георгійович
МПК: G01G 19/00
Мітки: визначенням, вагонні, тяжіння, вагона, ваги, центру, дво, відхілення, триплатформні
Формула / Реферат:
Ваги вагонні дво- або триплатформні з визначенням відхилень центру тяжіння вагона, які мають дві або три платформи, кожна з яких спирається на чотири ваговимірювальні датчики, мікропроцесорний контролер, в складі якого є енергонезалежна пам'ять, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло та інтерфейс для підключення каналів телеметрії, які відрізняються тим, що...
Ваги вагонні з визначенням відхилень центра ваги вагона
Номер патенту: 47685
Опубліковано: 25.02.2010
Автор: Бугаєнко Георгій Якович
МПК: G01G 19/00
Мітки: відхилень, ваги, центра, вагона, вагонні, визначенням
Формула / Реферат:
Ваги вагонні з визначенням відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, встановлені по кутах платформи, мікропроцесорний контролер з енергонезалежною пам'яттю, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, введені чотири суматори,...
Ваги вагонні з визначенням відхилень центра ваги вагона
Номер патенту: 75619
Опубліковано: 10.12.2012
Автор: Полуектов Дмитро Володимирович
МПК: G01G 19/02, G01G 19/00, G01G 19/04
Мітки: центра, ваги, визначенням, вагона, вагонні, відхилень
Формула / Реферат:
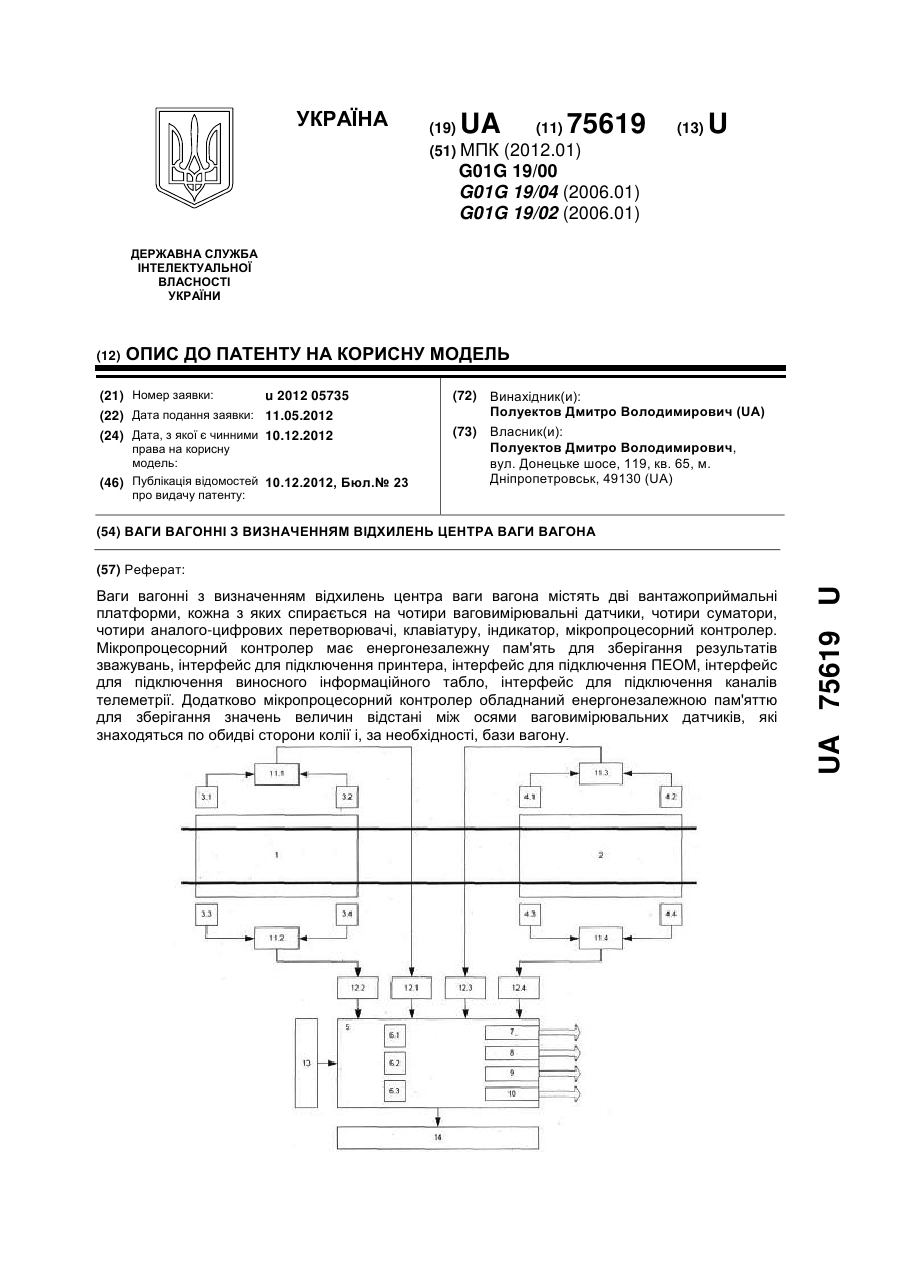
Ваги вагонні з визначенням відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, що встановлені по кутах платформ, чотири суматори, чотири аналого-цифрових перетворювачі, клавіатуру, індикатор, причому на два входи кожного з суматорів підведені виходи двох ваговимірювальних датчиків, які встановлені по один бік кожної платформи, а вихід кожного суматора зв'язаний...
Пристрій для визначення координат центра тяжіння зображення
Номер патенту: 51877
Опубліковано: 10.08.2010
Автори: Кожем'яко Володимир Прокопович, Павлов Сергій Володимирович, Бондаренко Наталія Володимирівна
МПК: G06K 9/00
Мітки: визначення, тяжіння, центра, координат, зображення, пристрій
Формула / Реферат:
1. Пристрій для визначення координат центра тяжіння зображення, що містить матрицю фотоперетворювачів, аналого-цифровий перетворювач, два накопичувальні суматори, вхід першого з яких сполучений з виходом аналого-цифрового перетворювача, а вихід сполучений з входом другого накопичувального суматора, блок ділення, перший і другий інформаційні входи якого сполучені відповідно з виходами першого і другого накопичувальних суматорів, два регістри,...
Пристрій автоматичного визначення маси вантажу у вагоні в статиці на одноплатформних вагах
Номер патенту: 32551
Опубліковано: 26.05.2008
Автори: Поповкін Юрій Матвійович, Дегтярик Микола Володимирович, Войтович Олександр Володимирович
МПК: G01G 15/00
Мітки: пристрій, статиці, вагах, вантажу, одноплатформних, вагони, маси, визначення, автоматичного
Формула / Реферат:
Пристрій автоматичного визначення маси вантажу у вагоні в статиці на одноплатформних вагах, що містять тензодатчики, аналого-цифрові перетворювачі, який відрізняється тим, що складається з генератора імпульсів, з'єднаного із другим входом першої логічної схеми І, перший вхід якого підключений до виходу тригера пам'яті, а вихід через перемикач Пр1 з'єднаний з одним із входів лічильника, а вихід підключений до входу п'ятого дешифратора Д,...