Ваги вагонні з цифровими датчиками з визначенням відхилення центру тяжіння вагона
Номер патенту: 116123
Опубліковано: 10.05.2017


Формула / Реферат
Вагонні ваги, що містять дві вантажоприймальні платформи, мікропроцесорний контролер з енергонезалежною пам'яттю, інтерфейс для підключення принтера, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, клавіатуру і індикатор, які відрізняються тим, що в них введені цифрові датчики, що встановлені по кутах платформи, кожен із яких має стандартний цифровий інтерфейс, при цьому вихід кожного з датчиків підведений до інтерфейсної шини, яка підключена до відповідного входу мікропроцесорного контролера, а відхилення центра тяжіння ваги вагона відносно поперечної ![]() та повздовжньої
та повздовжньої ![]() площин його симетрії вираховується мікропроцесорним контролером за формулами:
площин його симетрії вираховується мікропроцесорним контролером за формулами:
![]()
![]()
причому в цих формулах:
![]() - відстань між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії;
- відстань між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії; ![]() - база вагона;
- база вагона; ![]() - маса вагона;
- маса вагона; ![]() ,
, ![]() ,
, ![]() ,
, ![]() - маса лівого та правого бортів вагона і першого та другого візків, відповідно, які вираховуються за формулами:
- маса лівого та правого бортів вагона і першого та другого візків, відповідно, які вираховуються за формулами:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
де ![]() ,
, ![]() ,
, ![]() ,
, ![]() - маса, відповідно, лівого борту першого візка, правого борту першого візка, лівого борту другого візка, правого борту другого візка, при цьому вихід клавіатури підключений до входу мікропроцесорного контролера, а вихід контролера підключений до входу індикатора.
- маса, відповідно, лівого борту першого візка, правого борту першого візка, лівого борту другого візка, правого борту другого візка, при цьому вихід клавіатури підключений до входу мікропроцесорного контролера, а вихід контролера підключений до входу індикатора.
Текст
Реферат: Вагонні ваги містять дві вантажоприймальні платформи, мікропроцесорний контролер з енергонезалежною пам'яттю, інтерфейс для підключення принтера, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, клавіатуру і індикатор. Додатково введені цифрові датчики, що встановлені по кутах платформи, кожен із яких має стандартний цифровий інтерфейс. Вихід кожного з датчиків підведений до інтерфейсної шини, яка підключена до відповідного входу мікропроцесорного контролера. Відхилення центра тяжіння ваги вагона відносно поперечної y та повздовжньої x площин його симетрії вираховується мікропроцесорним контролером. UA 116123 U (54) ВАГИ ВАГОННІ З ЦИФРОВИМИ ДАТЧИКАМИ З ВИЗНАЧЕННЯМ ВІДХИЛЕННЯ ЦЕНТРУ ТЯЖІННЯ ВАГОНА UA 116123 U UA 116123 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до ваговимірювальної техніки та може бути використана, коли потрібно визначити центр тяжіння вагона та його відхилення від повздовжньої та поперечної осі, у тому разі, коли як датчики ваги застосовуються цифрові датчики. Задачею корисної моделі є усунення залежності від стану електромагнітного середовища та схильності до відмов та похибок з цього приводу. Відомі ваги для вимірювання маси вантажу (патент України № 47685 "Ваги вагонні з визначенням відхилень центра ваги вагона" найближчий аналог), які мають "дві вантажоприймальні платформи, кожна з яких опирається на чотири ваговимірювальні датчики, встановлені по кутах платформи, мікропроцесорний контролер з енергонезалежною пам'яттю, інтерфейс для підключення принтера, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення ПЕОМ, чотири суматори, чотири аналого-цифрових перетворювачі, клавіатуру та індикатор, причому на два входи кожного з суматорів підведені виходи двох ваговимірювальних датчиків, які встановлені по один бік кожної платформи, а вихід кожного суматора зв'язаний зі входом аналого-цифрового перетворювача, вихід якого підключений до відповідного входу мікропроцесорного контролера, при цьому відхилення центра ваги вагона відносно повздовжньої осі вираховується мікропроцесорним контролером за формулою L y (Gлб Gnб ) , 2Gв а відхилення центра ваги вагона відносно поперечної осі вираховується мікропроцесорним контролером за формулою Б x (Gм1 Gм2 ) , 2Gв причому в цих формулах: L - відстань між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії; Б - база вагона; Gлб і Gпб - маса лівого та правого бортів вагона, відповідно, які вираховуються за формулами: Gлб G1лб G2лб , Gnб G1nб G2nб , Gm1 і Gm2 - масса першого та другого візків, відповідно, які вираховується за формулами: Gm1 G1лб G1nб , Gm2 G2лб G2nб , де G1лб , G1пб , G2лб , G2пб - маса, відповідно, лівого борту першого візка, правого борту першого візка, лівого борту другого візка, правого борту другого візка, при цьому вихід клавіатури підключений до входу мікропроцесорного контролера, а вихід контролера підключений до входу індикатора. Недоліком цих ваг є необхідність використання аналогових тензометричних датчиків та аналого-цифрових перетворювачів, які не відповідають сучасним вимогам до вимірювального обладнання, оскільки мають залежність від стану електромагнітного середовища та схильні до відмов та похибок з цього приводу. Задачею корисної моделі є використання цифрових датчиків у вагонних вагах з вимірюванням відхилення центра тяжіння вагона відносно його площин симетрії. Поставлена задача вирішується тим, що в відомих вагах, що містять дві вантажоприймальні платформи, мікропроцесорний контролер з енергонезалежною пам'яттю, інтерфейс для підключення принтера, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, клавіатуру і індикатор, згідно з корисною моделлю, введені цифрові датчики, що встановлені по кутах платформи, кожен із яких, також як і мікропроцесорний контролер, має стандартний цифровий інтерфейс (наприклад, RS232 або RS485), при цьому відхилення центра ваги вагона відносно повздовжньої осі вираховується мікропроцесорним контролером за формулою: L y (Gлб Gnб ) , 2Gв а відхилення центра ваги вагона відносно поперечної осі вираховуються мікропроцесорним контролером за формулою: Б x (Gм1 Gм2 ) , 2Gв 1 UA 116123 U 5 10 15 20 25 30 35 40 45 50 причому в цих формулах: L - відстань між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії; Б - база вагона; Gв - маса вагона, Gлб та Gnб - маса лівого та правого бортів вагона, відповідно, які вираховуються за формулами: Gлб G1лб G2лб , Gnб G1nб G2nб , Gв Gлб Gnб , Gm1 і Gm2 - маса першого та другого візків, відповідно, які вираховуються за формулами: Gm1 G1лб G1nб , Gm2 G2лб G2nб , де G1лб , G1nб , G2лб , G2nб - маса, відповідно, лівого борту першого візка, правого борту першого візка, лівого борту другого візка, правого борту другого візка, при цьому вихід клавіатури підключений до входу мікропроцесорного контролера, а вихід контролера підключений до входу індикатора. В свою чергу, маса G1лб лівого борту першого візка складається з суми сигналів, які надходять на мікропроцесорний контролер з цифрових датчиків 4.1 та да 4.2; маса G1nб правого борту першого візка складається з суми сигналів датчиків 4.3 та 4.4; маса G2лб лівого борту другого візка складається з суми сигналів, які надходять на мікропроцесорний контролер з цифрових датчиків 5.1 та да 5.2; маса G2nб правого борту другого візка складається з суми сигналів датчиків 5.3 та 5.4. Загальний вигляд пристрою, що пропонується, відображений на кресленні. Пристрій, що пропонується, має дві платформи 1 та 2, кожна з яких спирається на чотири цифрових датчика 3.1, 3.2, 3.3 та 3.4 - на платформі 1, та на чотири цифрових датчика 4.1, 4.2, 4.3 та 4.4 - на платформі 2, при цьому виходи всіх цифрових датчиків підключені до інтерфейсної шини 5, яка підведена до відповідного інтерфейсного входу 6 мікропроцесорного контролера 7, який має енергонезалежну пам'ять 8 для зберігання результатів зважування, інтерфейс 9 для підключення ПЕОМ, інтерфейс 10 для підключення виносного інформаційного табло, інтерфейс 11 для підключення послідовного каналу обміну інформацією з корпоративною сіттю, а також клавіатуру 12 та індикатор 13. Пристрій працює таким чином. Кожен візок вагона розміщується на своїй платформі, а сигнали з датчиків цифрових 3.1, 3.2, 3.3, 3.4 та 4.1, 4.2, 4.3, 4.4 почергово передаються по інтерфейсу 5 на відповідний вхід мікропроцесорного контролера 6, який вираховує відхилення y центра тяжіння вагона відносно поперечної площини симетрії по формулі L y (Gлб Gnб ) , 2Gв а відхилення центру тяжіння вагона відносно повздовжньої площини симетрії по формулі Б x (Gм1 Gм2 ) . 2Gв В цих формулах: L - відстань між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії; - база вагона; Gв - маса вагона, Gлб та Gnб - маса лівого та правого бортів вагона, Б відповідно, які вираховуються за формулами: Gлб G1лб G2лб , Gnб G1nб G2nб , Gв Gлб Gnб , Gm1 і Gm2 - маса першого та другого візків, відповідно, які вираховуються за формулами: Gm1 G1лб G1nб , Gm2 G2лб G2nб , де G1лб , G1nб , G2лб , G2nб - маса, відповідно, лівого борту першого візка, правого борту першого візка, лівого борту другого візка, правого борту другого візка, при цьому вихід клавіатури підключений до входу мікропроцесорного контролера, а вихід контролера підключений до входу індикатора. 2 UA 116123 U 5 10 Всі результати розрахунків передаються мікропроцесорним контролером до індикатора 13 та відображаються на ньому, що дає можливість оператору ваг контролювати процес завантаження вагона та впливати, при необхідності, на нього. Дана сукупність суттєвих ознак дозволяє, в порівнянні з найближчим аналогом, використати цифрові датчики у вагонних вагах з вимірюванням відхилення центра тяжіння вагону відносно його площин симетрії. Сукупність суттєвих ознак, які характеризують ваги вагонні з цифровими датчиками, які вимірюють відхилення центра тяжіння вагона відносно його поперечної та повздовжньої площин симетрії, дає можливість виключити залежність вагонних ваг від стану електромагнітного середовища та схильні до відказів та похибок з цього приводу. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Вагонні ваги, що містять дві вантажоприймальні платформи, мікропроцесорний контролер з енергонезалежною пам'яттю, інтерфейс для підключення принтера, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, клавіатуру і індикатор, які відрізняються тим, що в них введені цифрові датчики, що встановлені по кутах платформи, кожен із яких має стандартний цифровий інтерфейс, при цьому вихід кожного з датчиків підведений до інтерфейсної шини, яка підключена до відповідного входу мікропроцесорного контролера, а відхилення центра тяжіння ваги вагона відносно поперечної y та повздовжньої x площин його симетрії вираховується мікропроцесорним контролером за формулами: L y (Gлб Gnб ), 2Gв Б (Gм1 Gм2 ), 2Gв причому в цих формулах: L - відстань між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії; Б - база вагона; Gв - маса вагона; G лб , Gnб , Gm1 , Gm2 - маса лівого та правого бортів вагона і першого та другого візків, відповідно, які вираховуються за формулами: Gв Gлб Gnб , Gлб G1лб G2лб , Gnб G1nб G2nб , Gm1 G1лб G1nб , Gm2 G2лб G2nб , де G1лб , G1nб , G2лб , G2nб - маса, відповідно, лівого борту першого візка, правого борту першого візка, лівого борту другого візка, правого борту другого візка, при цьому вихід клавіатури підключений до входу мікропроцесорного контролера, а вихід контролера підключений до входу індикатора. x 25 30 35 3 UA 116123 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01G 19/04, G01G 19/00
Мітки: відхілення, вагонні, визначенням, цифровими, датчиками, тяжіння, ваги, вагона, центру
Код посилання
<a href="https://ua.patents.su/6-116123-vagi-vagonni-z-cifrovimi-datchikami-z-viznachennyam-vidkhilennya-centru-tyazhinnya-vagona.html" target="_blank" rel="follow" title="База патентів України">Ваги вагонні з цифровими датчиками з визначенням відхилення центру тяжіння вагона</a>
Ваги вагонні дво- або триплатформні з визначенням відхилення центру тяжіння вагона
Номер патенту: 51330
Опубліковано: 12.07.2010
Автори: Бугаєнко Георгій Якович, Бугаєнко Максим Георгійович, Бугаєнко Єгор Георгійович
МПК: G01G 19/00
Мітки: ваги, дво, тяжіння, вагона, вагонні, триплатформні, відхілення, визначенням, центру
Формула / Реферат:
Ваги вагонні дво- або триплатформні з визначенням відхилень центру тяжіння вагона, які мають дві або три платформи, кожна з яких спирається на чотири ваговимірювальні датчики, мікропроцесорний контролер, в складі якого є енергонезалежна пам'ять, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло та інтерфейс для підключення каналів телеметрії, які відрізняються тим, що...
Ваги вагонні з визначенням відхилень центра ваги вагона
Номер патенту: 47685
Опубліковано: 25.02.2010
Автор: Бугаєнко Георгій Якович
МПК: G01G 19/00
Мітки: ваги, вагона, відхилень, визначенням, центра, вагонні
Формула / Реферат:
Ваги вагонні з визначенням відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, встановлені по кутах платформи, мікропроцесорний контролер з енергонезалежною пам'яттю, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, введені чотири суматори,...
Ваги вагонні з визначенням відхилень центра ваги вагона
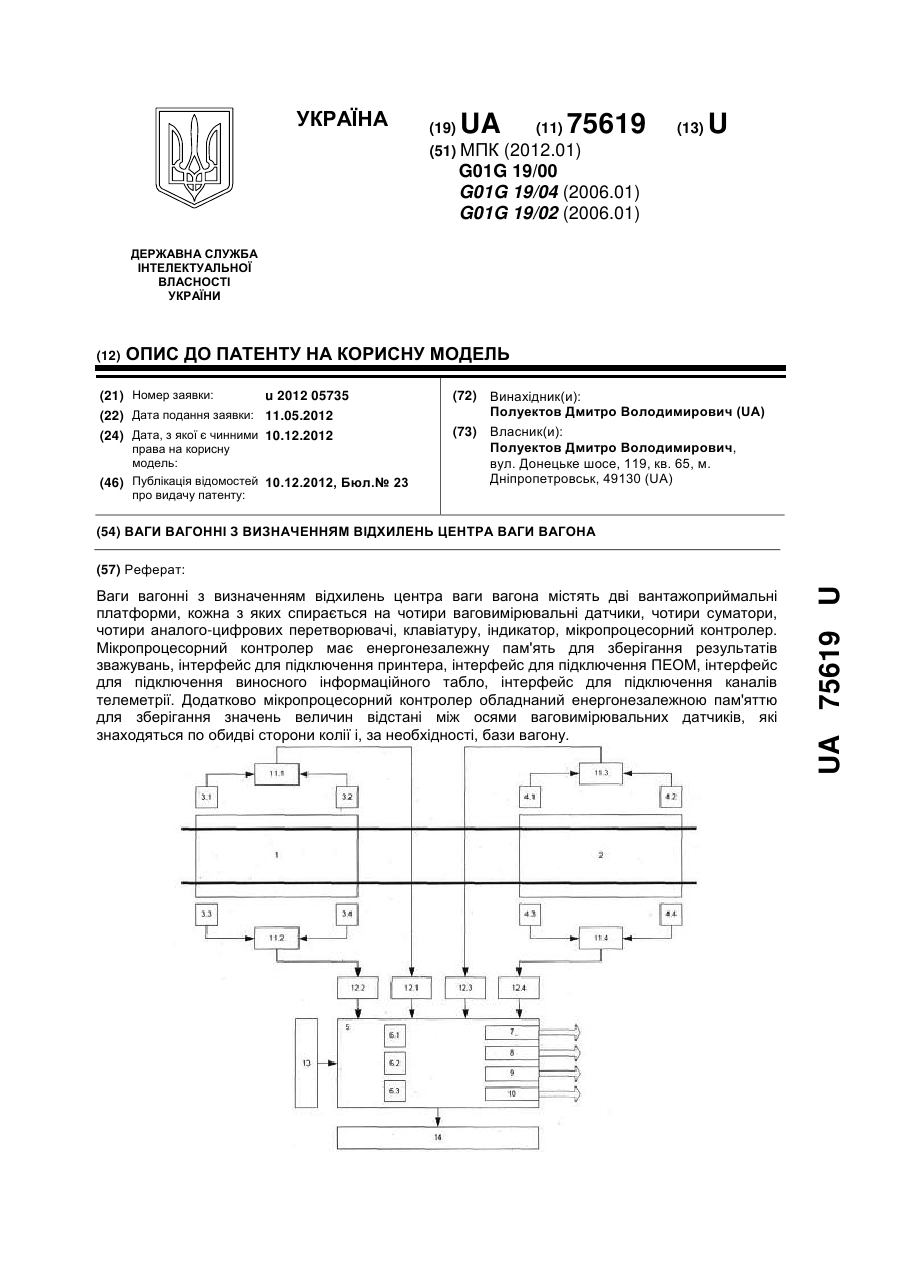
Номер патенту: 75619
Опубліковано: 10.12.2012
Автор: Полуектов Дмитро Володимирович
МПК: G01G 19/00, G01G 19/04, G01G 19/02
Мітки: вагона, визначенням, відхилень, ваги, центра, вагонні
Формула / Реферат:
Ваги вагонні з визначенням відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, що встановлені по кутах платформ, чотири суматори, чотири аналого-цифрових перетворювачі, клавіатуру, індикатор, причому на два входи кожного з суматорів підведені виходи двох ваговимірювальних датчиків, які встановлені по один бік кожної платформи, а вихід кожного суматора зв'язаний...
Спосіб визначення відхилення центра тяжіння вантажу у вагоні відносно площин симетрії вагона
Номер патенту: 100536
Опубліковано: 27.07.2015
Автори: Бугаєнко Георгій Якович, Бугаєнко Єгор Георгійович
МПК: G01G 19/08
Мітки: центра, тяжіння, площин, вантажу, відхілення, визначення, симетрії, відносної, вагони, спосіб, вагона
Формула / Реферат:
Спосіб вимірювання відхилення центра тяжіння вантажу у вагоні відносно площини симетрії вагона, який реалізують за допомогою вагонних ваг, що мають функцію вимірювання відхилення центра тяжіння вагона відносно його площин симетрії, який полягає в тому, що на першому етапі вимірюють відхилення центра тяжіння маси-тари порожнього вагона відносно його повздовжньої та...
Спосіб визначення положення центру ваги тіла
Номер патенту: 68193
Опубліковано: 26.03.2012
Автори: Аніскевич Леонід Володимирович, Погорілець Олександр Миколайович
МПК: G01B 5/00
Мітки: визначення, центру, ваги, положення, спосіб, тіла
Формула / Реферат:
Спосіб визначення положення центру ваги тіла, яке має складові частини, сили тяжіння і координати центрів їх тяжіння, який відрізняється тим, що вектори сил, об'ємів чи площ складових частин тіла у певному масштабі відкладають у двох протилежних вертикальних напрямках: більші сили - у центрі тяжіння складової частини дії менших сил, а менші сили - у центрі тяжіння дії більших сил; кінець вектора сили одної частини, що спрямований вгору і...
Попередній патент: Малопотужний вітроелектрогенератор зі здвоєним дводисковим ротором спрощеної конструкції
Наступний патент: Штангенциркуль адаптивний
Випадковий патент: Пластмасовий профіль стулки для збирання блоків для закривання отворів будівельних конструкцій