Система стабілізації положення та активного віброзахисту об’єкта у просторі на основі електромагнітного підвісу

Формула / Реферат
Система стабілізації положення та активного віброзахисту об'єкта у просторі, що містить електромагнітний підвіс, який включає електромагніт постійного струму, якір з підвішуваним об'єктом, на який діє електромагнітне зусилля, регульоване джерело напруги для живлення електромагніта, датчик зазору, головний зворотний зв'язок по зазору та регулятор положення об'єкта, яка відрізняється тим, що для компенсації дії координатних та зовнішніх збурень введено додатковий датчик абсолютного прискорення (акселерометр), установлений на рухомій частині електромагнітного підвісу, на яку діють збурення, а вихідний сигнал акселерометра подають на вхід регулятора положення.
Текст
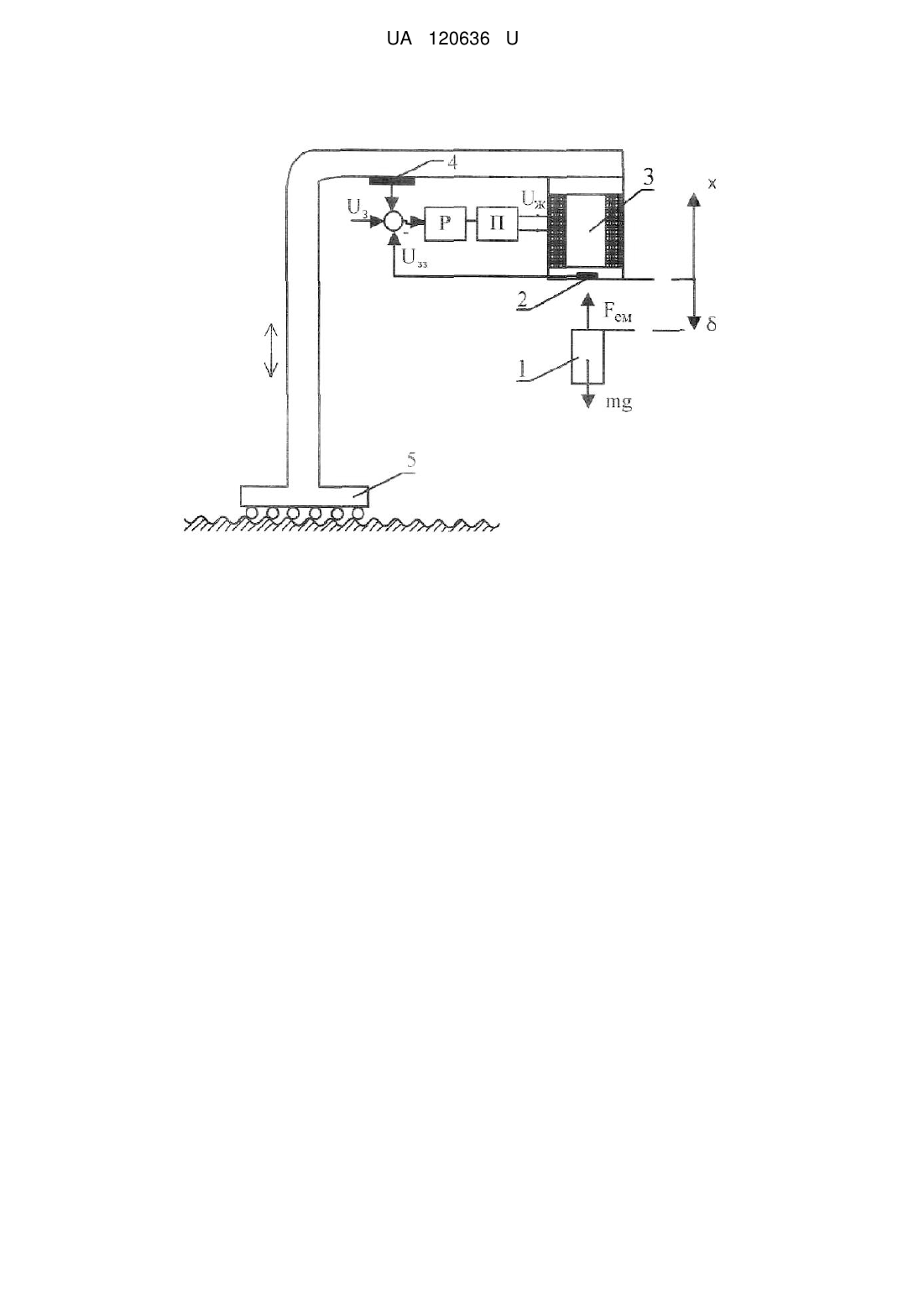
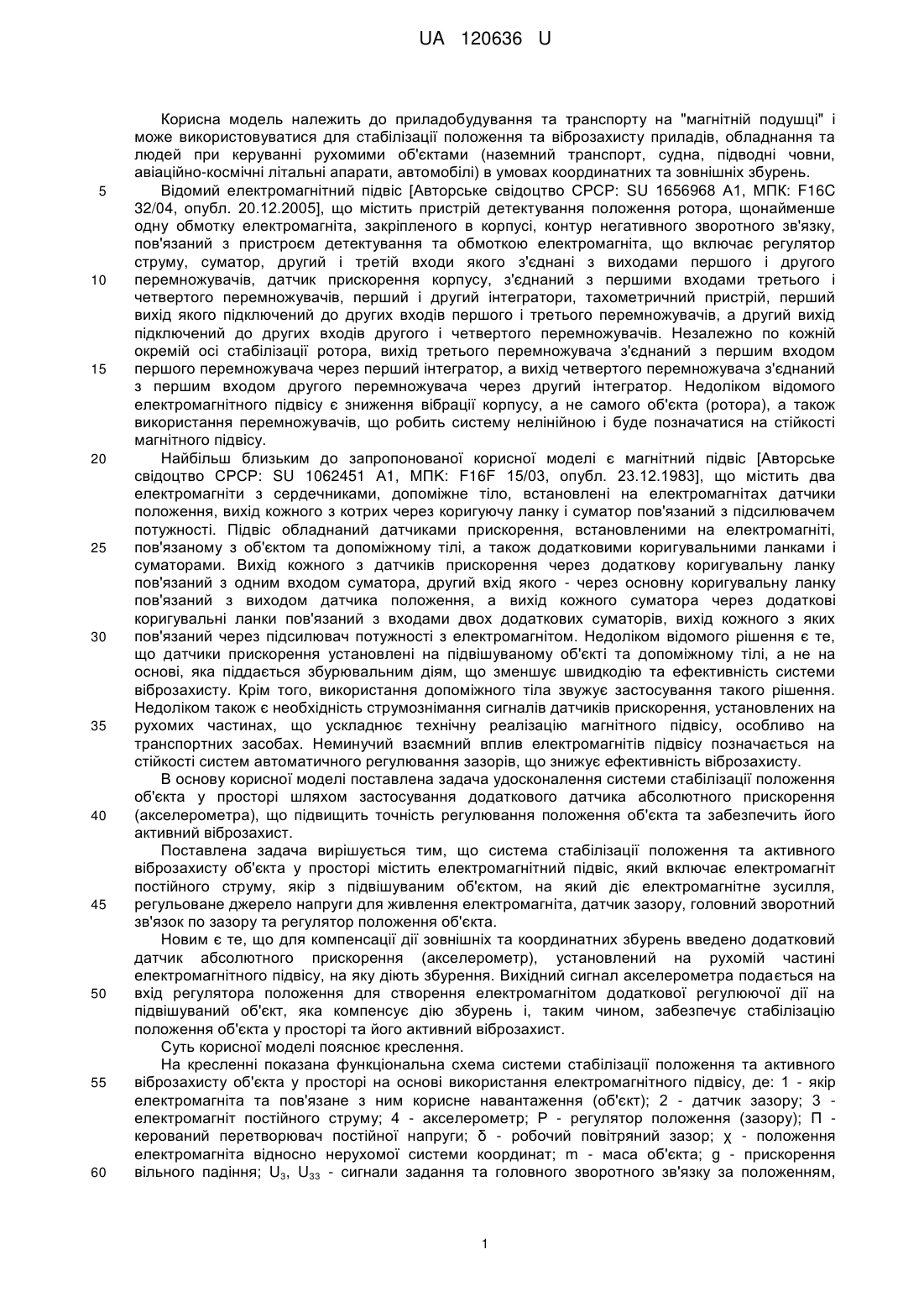
Реферат: Система стабілізації положення та активного віброзахисту об'єкта у просторі містить електромагнітний підвіс, який включає електромагніт постійного струму, якір з підвішуваним об'єктом, на який діє електромагнітне зусилля, регульоване джерело напруги для живлення електромагніта, датчик зазору, головний зворотний зв'язок по зазору та регулятор положення об'єкта. Для компенсації дії координатних та зовнішніх збурень введено додатковий датчик абсолютного прискорення (акселерометр), установлений на рухомій частині електромагнітного підвісу, на яку діють збурення, а вихідний сигнал акселерометра подають на вхід регулятора положення. UA 120636 U (54) СИСТЕМА СТАБІЛІЗАЦІЇ ПОЛОЖЕННЯ ТА АКТИВНОГО ВІБРОЗАХИСТУ ОБ'ЄКТА У ПРОСТОРІ НА ОСНОВІ ЕЛЕКТРОМАГНІТНОГО ПІДВІСУ UA 120636 U UA 120636 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до приладобудування та транспорту на "магнітній подушці" і може використовуватися для стабілізації положення та віброзахисту приладів, обладнання та людей при керуванні рухомими об'єктами (наземний транспорт, судна, підводні човни, авіаційно-космічні літальні апарати, автомобілі) в умовах координатних та зовнішніх збурень. Відомий електромагнітний підвіс [Авторське свідоцтво СРСР: SU 1656968 А1, МПК: F16C 32/04, опубл. 20.12.2005], що містить пристрій детектування положення ротора, щонайменше одну обмотку електромагніта, закріпленого в корпусі, контур негативного зворотного зв'язку, пов'язаний з пристроєм детектування та обмоткою електромагніта, що включає регулятор струму, суматор, другий і третій входи якого з'єднані з виходами першого і другого перемножувачів, датчик прискорення корпусу, з'єднаний з першими входами третього і четвертого перемножувачів, перший і другий інтегратори, тахометричний пристрій, перший вихід якого підключений до других входів першого і третього перемножувачів, а другий вихід підключений до других входів другого і четвертого перемножувачів. Незалежно по кожній окремій осі стабілізації ротора, вихід третього перемножувача з'єднаний з першим входом першого перемножувача через перший інтегратор, а вихід четвертого перемножувача з'єднаний з першим входом другого перемножувача через другий інтегратор. Недоліком відомого електромагнітного підвісу є зниження вібрації корпусу, а не самого об'єкта (ротора), а також використання перемножувачів, що робить систему нелінійною і буде позначатися на стійкості магнітного підвісу. Найбільш близьким до запропонованої корисної моделі є магнітний підвіс [Авторське свідоцтво СРСР: SU 1062451 Α1, ΜΠΚ: F16F 15/03, опубл. 23.12.1983], що містить два електромагніти з сердечниками, допоміжне тіло, встановлені на електромагнітах датчики положення, вихід кожного з котрих через коригуючу ланку і суматор пов'язаний з підсилювачем потужності. Підвіс обладнаний датчиками прискорення, встановленими на електромагніті, пов'язаному з об'єктом та допоміжному тілі, а також додатковими коригувальними ланками і суматорами. Вихід кожного з датчиків прискорення через додаткову коригувальну ланку пов'язаний з одним входом суматора, другий вхід якого - через основну коригувальну ланку пов'язаний з виходом датчика положення, а вихід кожного суматора через додаткові коригувальні ланки пов'язаний з входами двох додаткових суматорів, вихід кожного з яких пов'язаний через підсилювач потужності з електромагнітом. Недоліком відомого рішення є те, що датчики прискорення установлені на підвішуваному об'єкті та допоміжному тілі, а не на основі, яка піддається збурювальним діям, що зменшує швидкодію та ефективність системи віброзахисту. Крім того, використання допоміжного тіла звужує застосування такого рішення. Недоліком також є необхідність струмознімання сигналів датчиків прискорення, установлених на рухомих частинах, що ускладнює технічну реалізацію магнітного підвісу, особливо на транспортних засобах. Неминучий взаємний вплив електромагнітів підвісу позначається на стійкості систем автоматичного регулювання зазорів, що знижує ефективність віброзахисту. В основу корисної моделі поставлена задача удосконалення системи стабілізації положення об'єкта у просторі шляхом застосування додаткового датчика абсолютного прискорення (акселерометра), що підвищить точність регулювання положення об'єкта та забезпечить його активний віброзахист. Поставлена задача вирішується тим, що система стабілізації положення та активного віброзахисту об'єкта у просторі містить електромагнітний підвіс, який включає електромагніт постійного струму, якір з підвішуваним об'єктом, на який діє електромагнітне зусилля, регульоване джерело напруги для живлення електромагніта, датчик зазору, головний зворотний зв'язок по зазору та регулятор положення об'єкта. Новим є те, що для компенсації дії зовнішніх та координатних збурень введено додатковий датчик абсолютного прискорення (акселерометр), установлений на рухомій частині електромагнітного підвісу, на яку діють збурення. Вихідний сигнал акселерометра подається на вхід регулятора положення для створення електромагнітом додаткової регулюючої дії на підвішуваний об'єкт, яка компенсує дію збурень і, таким чином, забезпечує стабілізацію положення об'єкта у просторі та його активний віброзахист. Суть корисної моделі пояснює креслення. На кресленні показана функціональна схема системи стабілізації положення та активного віброзахисту об'єкта у просторі на основі використання електромагнітного підвісу, де: 1 - якір електромагніта та пов'язане з ним корисне навантаження (об'єкт); 2 - датчик зазору; 3 електромагніт постійного струму; 4 - акселерометр; Ρ - регулятор положення (зазору); Π керований перетворювач постійної напруги; δ - робочий повітряний зазор; χ - положення електромагніта відносно нерухомої системи координат; m - маса об'єкта; g - прискорення вільного падіння; U3, U33 - сигнали задання та головного зворотного зв'язку за положенням, 1 UA 120636 U 5 10 15 20 відповідно; FEM - електромагнітне зусилля. Як видно з креслення збурення передаються через основу 5 на електромагніт постійного струму 3 і одночасно сприймаються акселерометром 4. Система стабілізації положення та активного віброзахисту об'єкта працює наступним чином. При зміні положення (координати) рухомої частині електромагнітного підвісу внаслідок дії зовнішніх або координатних збурень, акселерометр змінює своє положення і виробляє сигнал, пропорційний прискоренню. Після двократного інтегрування цей сигнал відповідає зміні положення об'єкта відносно нерухомої системи координат і подається на вхід регулятора положення як основний компенсуючий зворотний зв'язок. Для підвищення швидкодії основного компенсуючого зв'язку за положенням використано гнучкі зв'язки за прискоренням та швидкістю, які також отримуються від акселерометра у вигляді його безпосереднього сигналу та його першої інтегральної складової і подаються на вхід регулятора положення. Цим забезпечується зворотний зв'язок системи електромагнітного підвісу за збуренням. Таким чином, магнітне зусилля, створюване електромагнітом постійного струму, утримує підвішуваний об'єкт в заданому положенні відносно нерухомої системи координат. Компенсація дії зовнішніх збурень здійснюється шляхом створення електромагнітом додаткової регулюючої дії на підвішуваний об'єкт, яка протидіє збуренню і, таким чином, забезпечує стабілізацію положення об'єкта у просторі та його активний віброзахист. Пропонована корисна модель дозволяє підвищити точність, швидкодію та чутливість електромагнітного підвісу. Поєднання функцій магнітного підвісу і активного віброзахисту в єдиній структурі забезпечує формування інваріантної характеристики, що вирішує проблему створення безконтактної системи керування положенням об'єкта у просторі та його активного віброзахисту. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 Система стабілізації положення та активного віброзахисту об'єкта у просторі, що містить електромагнітний підвіс, який включає електромагніт постійного струму, якір з підвішуваним об'єктом, на який діє електромагнітне зусилля, регульоване джерело напруги для живлення електромагніта, датчик зазору, головний зворотний зв'язок по зазору та регулятор положення об'єкта, яка відрізняється тим, що для компенсації дії координатних та зовнішніх збурень введено додатковий датчик абсолютного прискорення (акселерометр), установлений на рухомій частині електромагнітного підвісу, на яку діють збурення, а вихідний сигнал акселерометра подають на вхід регулятора положення. 2 UA 120636 U Комп’ютерна верстка О. Гергіль Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16F 15/03
Мітки: електромагнітного, підвісу, просторі, об'єкта, стабілізації, активного, основі, система, віброзахисту, положення
Код посилання
<a href="https://ua.patents.su/5-120636-sistema-stabilizaci-polozhennya-ta-aktivnogo-vibrozakhistu-obehkta-u-prostori-na-osnovi-elektromagnitnogo-pidvisu.html" target="_blank" rel="follow" title="База патентів України">Система стабілізації положення та активного віброзахисту об’єкта у просторі на основі електромагнітного підвісу</a>
Акселерометр та система його віброзахисту
Номер патенту: 1206
Опубліковано: 15.04.2002
Автори: Шкляр Володимир Петрович, Олексієнко Микола Петрович, Васильєв Володимир Леонідович, Леоненко Сергій Миколайович, Гуменюк Володимир Григорович, Гаврилюк Володимир Леонідович, Шервашидзе Володимир Варлаамович
МПК: G01P 15/13
Мітки: віброзахисту, акселерометр, система
Формула / Реферат:
1. Акселерометр, який містить розміщений за допомогою пружного підвісу чутливий елемент маятникового типу, датчик положення, коло зворотного зв'язку магнітоелектричного силового перетворювача з компенсаційною котушкою та схему для визначення показника прискорення, який відрізняється тим, що чутливий елемент підвішено на пружному підвісі, компенсаційна котушка встановлена на чутливому елементі між розміщеними від неї із зазором плоскими...
Система підвісу стріли екскаватора
Номер патенту: 41841
Опубліковано: 10.06.2009
Автори: Діхтенко Руслан Миколайович, Крупко Валерій Григорович
МПК: E02F 3/04
Мітки: підвісу, система, екскаватора, стріли
Формула / Реферат:
Система підвісу стріли екскаватора, яка містить балку, л-подібний стояк, стрілу з головними блоками, рукоять з ковшем, яка відрізняється тим, що система підвісу стріли додатково оснащена пружним та демпферним пристроями, причому пружний та демпферний пристрої встановлені на л-подібному стояку.
Датчик кутової швидкості та система його віброзахисту
Номер патенту: 1207
Опубліковано: 15.04.2002
Автори: Шервашидзе Володимир Варлаамович, Гуменюк Володимир Григорович, Леоненко Сергій Миколайович, Васильєв Володимир Леонідович, Шкляр Володимир Петрович, Гаврилюк Володимир Леонідович, Олексієнко Микола Петрович
МПК: G01C 19/00, G01P 9/00
Мітки: датчик, кутової, швидкості, віброзахисту, система
Формула / Реферат:
1. Датчик кутової швидкості, який містить розміщений за допомогою підвісу чутливий елемент з гіромотором, датчик положення, коло зворотного зв'язку та схему визначення показника кутової швидкості, який відрізняється тим, що чутливий елемент підвішено у корпусі за допомогою гнучкого підвісу, гіромотор встановлено на чутливому елементі так, що вісь його обертання направлена перпендикулярно до осі, по якій згинається підвіс, і паралельно з віссю...
Система підвісу безпілотного літального апарата під парашутом з відчіплюванням
Номер патенту: 118510
Опубліковано: 10.08.2017
Автори: Макарчук Максим Віталійович, Мак Артур Володимирович, Франчук Роман Миколайович, Єгошин Григорій Вікторович
МПК: B64D 17/30, B64D 17/32
Мітки: відчіплюванням, апарата, парашутом, літального, безпілотного, система, підвісу
Формула / Реферат:
Система підвісу безпілотного літального апарату під парашутом з відчіплюванням, що містить основний фал парашута, що з'єднано зі стропами підвісу літака, які проходять через спеціальні рознесені по фюзеляжу кронштейни, та зведено на один замок відчіплювання, який приводиться в дію сервоприводом, яка відрізняється тим, що основний фал парашута напряму фіксовано замком відчіплення, який розміщений близько до центра мас літака та кріпиться до...
Система стабілізації швидкості літака
Номер патенту: 106163
Опубліковано: 25.04.2016
Автори: Симонов Володимир Федорович, Барашева Світлана Іванівна
МПК: G01S 13/02, B64C 19/00, G01P 3/44
Мітки: система, стабілізації, літака, швидкості
Формула / Реферат:
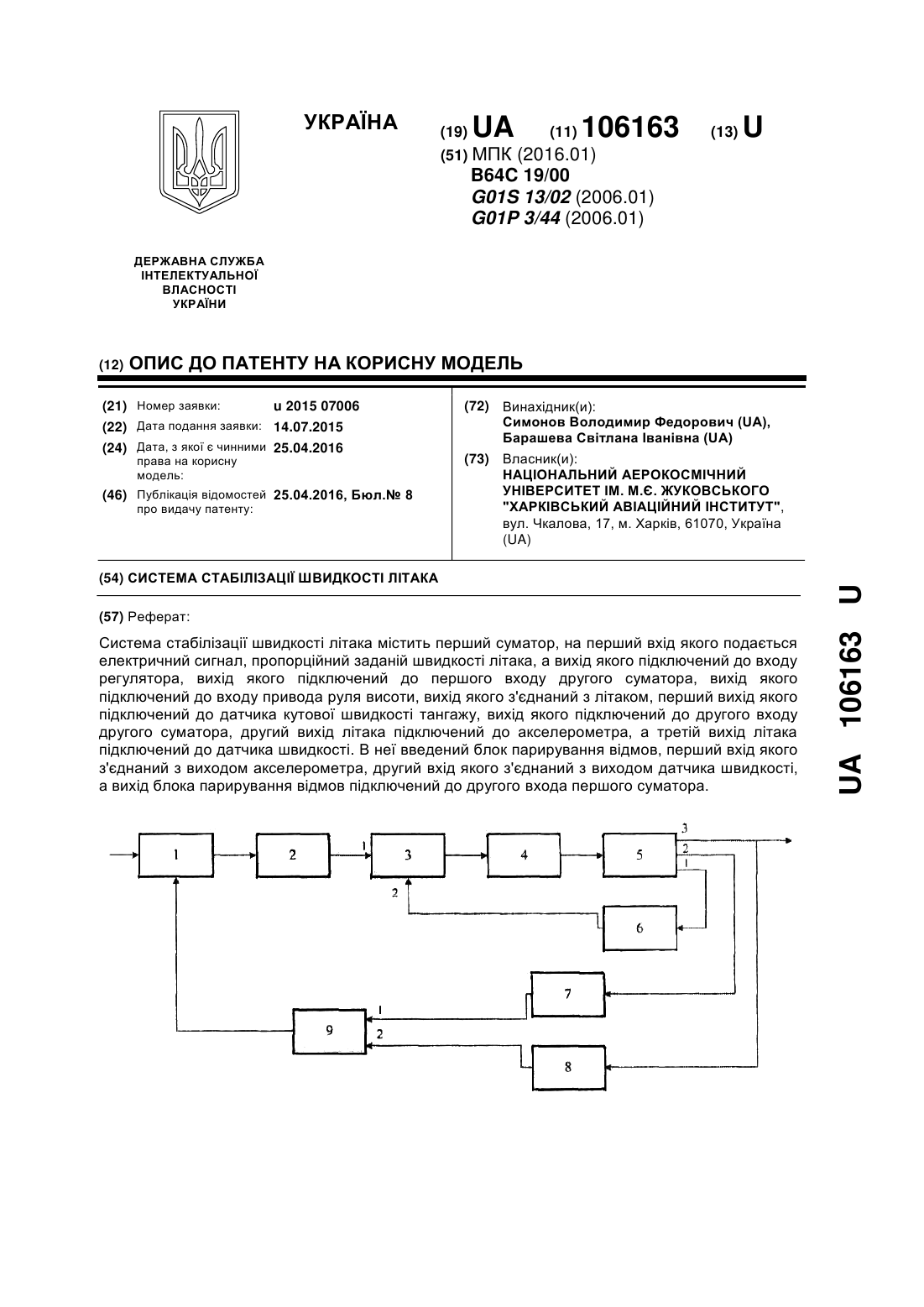
Система стабілізації швидкості літака, що містить перший суматор, на перший вхід якого подається електричний сигнал, пропорційний заданій швидкості літака, а вихід якого підключений до входу регулятора, вихід якого підключений до першого входу другого суматора, вихід якого підключений до входу привода руля висоти, вихід якого з'єднаний з літаком, перший вихід якого підключений до датчика кутової швидкості тангажу, вихід якого підключений до...
Попередній патент: Елемент насадки масообмінного апарата
Наступний патент: Стрічковий конвеєр з пристроєм для очистки стрічки
Випадковий патент: Гнучка гвинтова спіраль з пальцевим з'єднанням секцій