Вимірювач кутової координати цілі для секвентного радіолокатора
Формула / Реферат
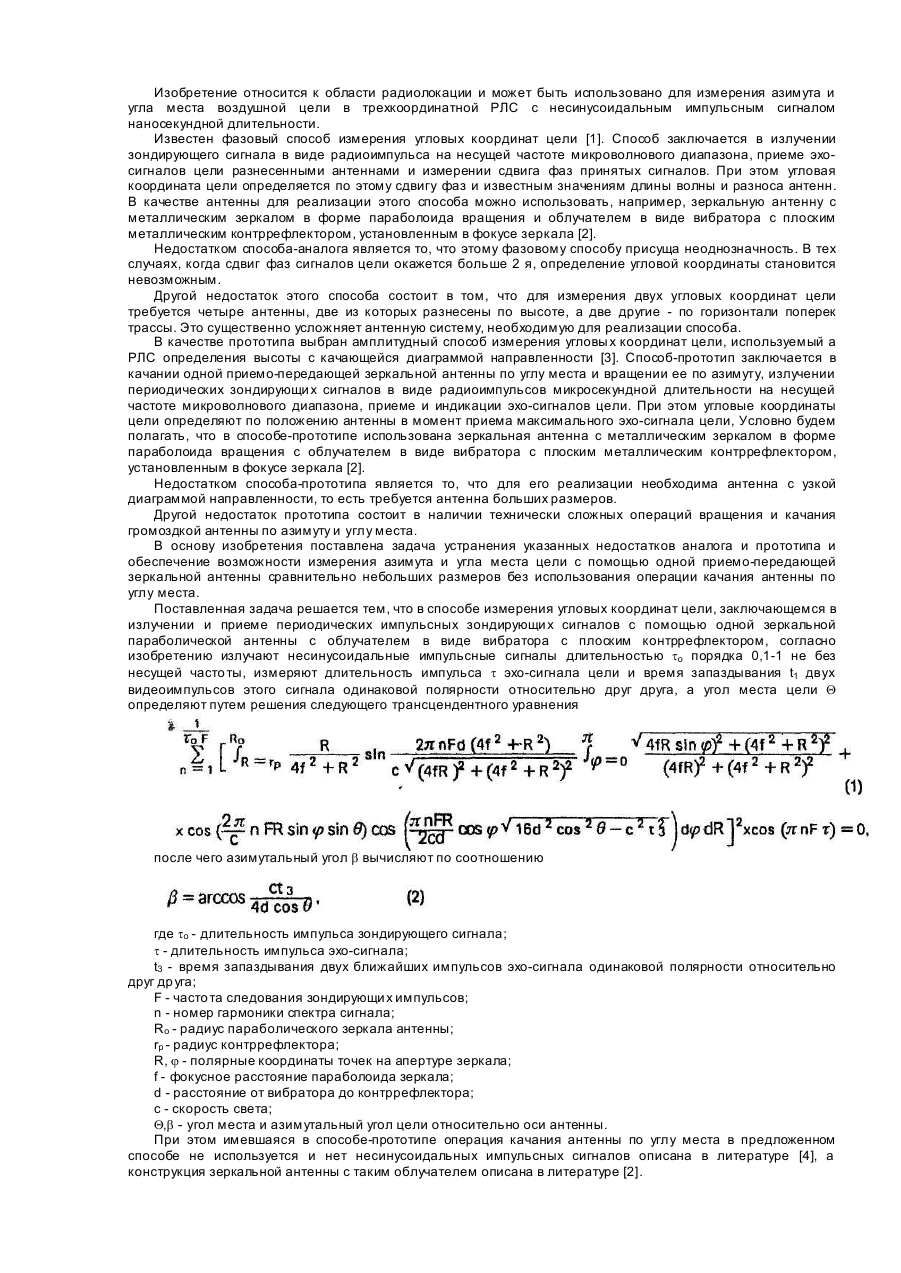
Измеритель угловой координаты цели для секвентного радиолокатора, содержащий приемо-передающую антенну с антенным переключателем, приемник и передатчик несинусоидальных импульсных сигналов в виде периодической последовательности с частотой следования прямоугольных видеоимпульсов наносекундной длительности без несущей частоты, отличающийся тем, что приемопередающая антенна выполнена в виде вибратора, концы которого связаны с антенным переключателем фидерной линией из двух коаксиальных кабелей, и плоского металлического рефлектора, удаленного от вибратора на расстояние равное или меньшее четверти произведения скорости света с на длительность видеоимпульса сигнала передатчика, в состав устройства дополнительно включены вычислитель, фазометр и два одинаковых узкополосных фильтра, настроенных на гармонику частоты следования видеоимпульсов передатчика, а меньше половины скважности сигнала передатчика, на выходе приемника включены параллельно в противоположной полярности два широкополосных диода, выходы которых связаны соответственно со своими узкополосными фильтрами, выходы фильтров связаны с фазометром сдвига фаз выходных синусоидальных напряжений этих фильтров, а выход фазометра связан с вычислителем угловой координаты цели по соотношению
где - угловая координата цели;
- скорость света;
- расстояние от вибратора до рефлектора;
- сдвиг фаз выходных синусоидальных напряжений узкополосных фильтров;
- частота следования видеоимпульсов передатчика;
- номер гармоники частоты настройки узкополосных фильтров;
- длительность видеоимпульса сигнала передатчика.
Текст
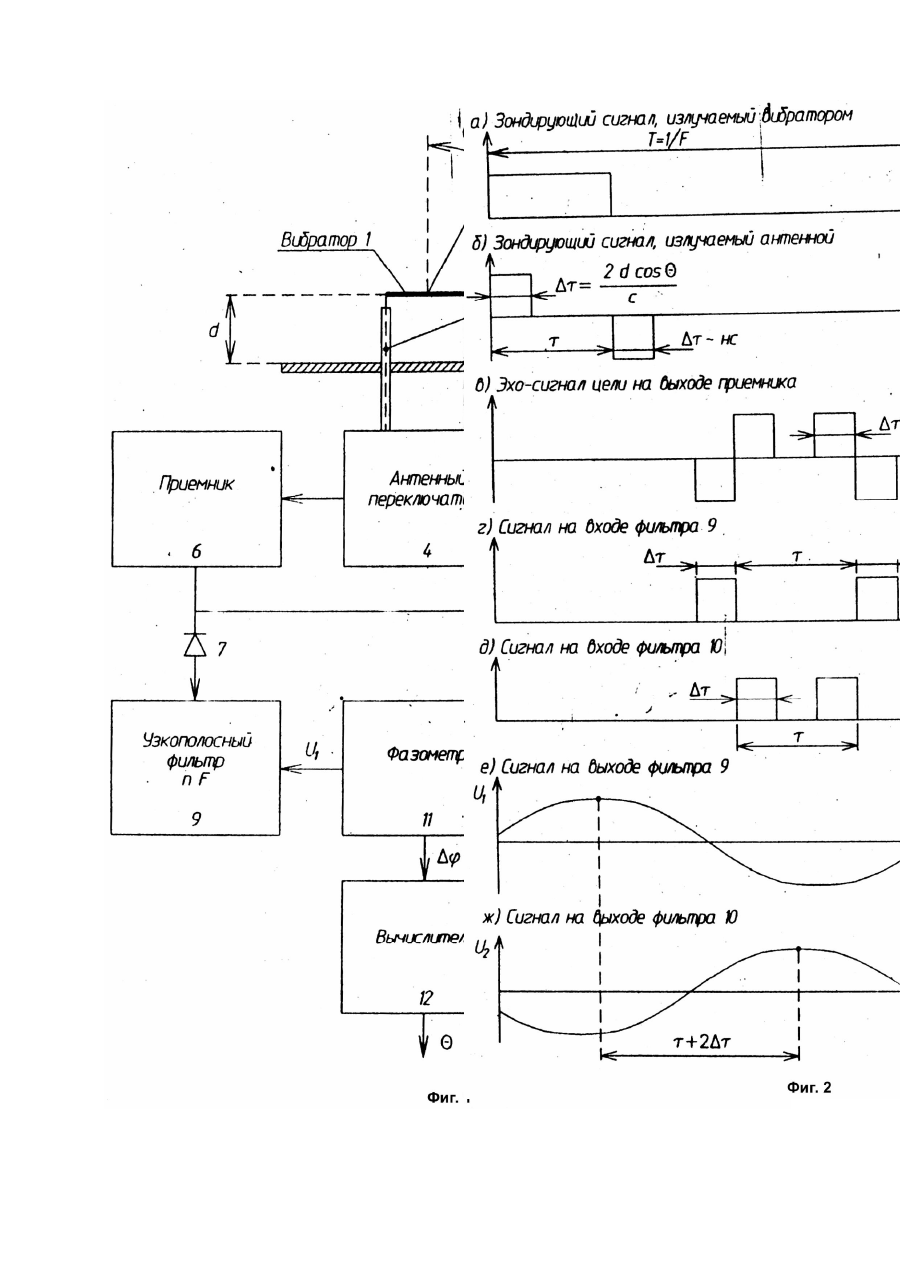
Изобретение относится к области радиолокации и может быть использовано в секвентных радиолокаторах с зондирующим сигналом а виде периодических видеоимпульсов наносекундной длительности без несущей частоты- для измерения угловой координаты или при высокой частоте следования и сравнительно большой длительности зондирующих видеоимпульсов и малых размерах антенной системы. В качестве прототипа выбран секвентный радиолокатор с разнесенной антенной системой для измерения угловой координаты цели [1]. Антенная система прототипа состоит из двух разнесенных антенн, одна из которых является приемо-передающей, а другая работает только на прием. Зондирующий сигнал прототипа представляет периодическую последовательность прямоугольных наносекундных видеоимпульсов поля радиоволн (длительность порядка 1нс и менее) без несущей частоты. В состав прототипа входят следующие основные элементы: антенная система из двух разнесенных антенн: антенный переключатель для переключения приемо-передающей антенны с передачи на прием; передатчик несинусоидальных импульсных сигналов в виде периодической последовательности прямоугольных видеоимпульсов наносекундной длительности без несущей частоты: два приемника в виде широкополосных усилителей наносекундмых видеоимпульсов (один из приемников связан с антенным переключателем приемо-передающей антенны, а другой - с приемной антенной); измеритель времени запаздывания импульсов эхо-сигнала цели в двух каналах приема относительно зондирующего импульса передатчика. Угловую координату цели в прототипе определяют по дальности от разнесенных антенн до цели по соотношению а дальности находят по результату измерения времени запаздывания импульсов эхосигнала цели в двух разнесенных антеннах относительно зондирующего импульса передатчика, где - угловая координата (например, азимут) цели; - дальность от приемо-передающей антенны до цели; - дальность от приемной антенны до цели; - расстояние между разнесенными антеннами. Для обеспечения однозначности определения дальности в прототипе требуется использовать сравнительно низкую частоту следования зондирующих импульсов, определяемую соотношением где - частота следования зондирующих видеоимпульсов; - максимальная дальность обнаружения цели; - скорость света. Ограничение (2) не позволяет использовать в прототипе высокую частоту следования зондирующих видеоимпульсов, а при уменьшении этой частоты вероятность обнаружения цели снижается. Использование в прототипе зондирующих видеоимпульсов малой наносекундной длительности обеспечивает высокую точность измерения дальности что позволяет определить угловую координату цели по соотношению (1). При этом расстояние между антеннами должна быть значительно больше произведения скорости света с на длительность зондирующего видеоимпульса Недостатком прототипа является то, что для обеспечения необходимой точности измерения угловой координаты цели требуется либо использовать зондирующие видеоимпульсы очень малой длительности либо необходимо разносить антенны на большое расстояние Причиной этого является ограничение (3) на и Так, например, при разносе антенн на расстояние требуется использовать зондирующие импульсы длительностью менее 1нс, а при использовании зондирующего импульса длительностью требуется разнести антенны на расстояние более 100м. Выполнить передатчик с очень малой длительностью зондирующих импульсов зачастую весьма затруднительно, а разнос антенн на большое расстояние недопустимо увеличивает стоимость антенной системы. В основу изобретения поставлена задача обеспечения необходимой точности измерения угловой координаты цели с помощью секвентного радиолокатора при использовании передатчика со сравнительно большой длительностью зондирующих видеоимпульсов и малых размерах антенной системы. Поставленная задача решается тем, что в измерителе угловой координаты цели для секвентного радиолокатора, содержащем приемопередающую антенну с антенным переключателем, приемник и передатчик несинусоидальных импульсных сигналов в виде периодической последовательности с частотой следования прямоугольных видеоимпульсов наносекундной длительности без несущей частоты, предусмотрены следующие отличия: приемо-передающая антенна выполнена в виде вибратора, концы которого связаны с антенным переключателем фидерной линией из двух коаксиальных кабелей, и плоского металлического рефлектора, удаленного от вибратора на расстояние равное или меньшее четверти произведения скорости света с на длительность видеоимпульса сигнала передатчика а в состав устройства дополнительно включены вычислитель, фазометр и два одинаковых узкополосных фильтра, настроенных на гармонику частоты следования видеоимпульсов передатчика, а меньше половины скважности сигнала передатчика а на выходе приемника включены параллельно в противоположной полярности два широкополосных диода, выходы которых связаны соответственно со своими узкополосными фильтрами, выходы фильтров связаны с фазометром сдвига фаз выходных синусоидальных напряжения этих фильтров, а выход фазометра связан с вычислителем угловой координаты цели по соотношению где - угловая координата цели; - скорость света; - расстояние от вибратора до рефлектора; - сдвиг фаз выходных синусоидальных напряжений узкополосных фильтров; - частота следования видеоимпульсов передатчика; - номер гармоники частоты настройки узкополосных фильтров; -длительность видеоимпульса сигнала передатчика. В предложенном устройстве использована только одна приемо-передающая антенна и один приемник, а имевшиеся в прототипе вторая приемная антенна, второй приемник и измеритель времени запаздывания импульсов эхо-сигнала цели относительно зондирующего импульса из состава устройства исключены. Предложенное техническое решение позволяет использовать для измерения угловой координации цели антенную систему сравнительно небольших размеров и выполнить передатчик с высокой частотой следования зондирующих видеоимпульсов и сравнительно большой (на порядок больше, чем в прототипе) длительностью видеоимпульса, что упрощает требования к передатчику и антенной системе и повышает вероятность обнаружения цели. Техническая сущность и принцип действия предложенного устройства поясняются чертежами. На фиг.1 представлена упрощенная структурная схема предложенного измерителя угловой координаты цели для секвентного радиолокатора, а также условно показаны конструкция приемо-передающей антенны и упрощенные эпюры сигнала передатчика и излучаемого антенной сигнала. На фиг.2 представлены упрощенные эпюры сигнала, излучаемого вибратором антенны, сигнала, излучаемого антенной, эхо-сигнала цели на выходе приемника, а также сигналов на входах и выходах двух узкополосных фильтров. В состав предложенного устройства на схеме фиг.1 входят следующие основные элементы: приемо-передающая антенна, состоящая из вибратора 1, запитываемого с концов фидерной линией 2 из двух коаксиальных кабелей одинаковой длины (по внутренним жилам этих кабелей), и плоского металлического рефлектора 3; антенный переключатель 4, закорачивающий вход приемника на время с момента начала излучения очередного зондирующего видеоимпульса передатчика; передатчик 5 несинусоидальных импульсных сигналов в виде периодической последовательности с высокой частотой следования видеоимпульсов наносекундной длительности (порядка десятков не) без несущей частоты; приемник 6 в виде широкополосного усилителя видеоимпульсов наносекундной длительности; широкополосные диоды 7, 8, подключенные к выходу приемника параллельно в противоположной полярности для разделения положительных и отрицательных видеоимпульсов эхо-сигнала цели; первый 9 и второй 10 одинаковые узкополосные фильтры, настроенные на гармонику частоты следования зондирующих видеоимпульсов фазометр 11 сдвига фаз выходного синусоидального напряжения на частоте с выхода фильтра 10 относительно выходного синусоидального напряжения с выхода фильтра 9; вычислитель 12 для вычисления угловой координаты цели по результату измерения сдвига фаз с помощью соотношения (6). В предложенном устройстве имеются следующие связи между элементами. Концы вибратора 1 связаны с внутренними жилами коаксиальных кабелей фидерной линии 2, связанной с антенным переключателем 4, вход которого связан с передатчиком 5, а выход - с приемником 6. Выход приемника 6 связан с диодами 7,8, выходы которых связаны соответственно со своими узкополосными фильтрами 9, 10. Выходы этих узкополосных фильтров связаны с фазометром 11, выход которого связан с вычислителем 12. Принцип действия предложенного устройства поясняется следующим. Использованы свойства несинусоидальных видеоимпульсов поля радиоволн изменять полярность видеоимпульса при отражении от рефлектора и цели. Вибратор 1 антенны излучает видеоимпульсы сравнительно большой длительности (порядка десятков не) (см.фиг.2а). Радиоволны, излучаемые вибратором 1, отражаются от рефлектора 3. При этом видеоимпульсы поля прямой волны вибратора и волны, отраженной от рефлектора имеют противоположную полярность и запаздывают друг относительно друга на время где - расстояние между вибратором и рефлектором; - угловая координата (азимут) цели; - скорость света. Соотношение (7) следует из геометрии антенны на фиг.1. Расстояние выбрано сравнительно небольшим из соотношения (4), поэтому видеоимпульсы прямой и отраженной от рефлектора радиоволн накладываются и частично подавляют друг друга. В результате антенна (вибратор и рефлектор вместе) будет излучать в сторону цели видеоимпульсы сравнительно небольшой длительности и чередующейся полярности (фиг.2б). При этом длительность излучаемых антенной видеоимпульсов положительной и отрицательной полярности зависит от направления излучения (с увеличением угла длительность уменьшается). При отражении радиоволн от малоразмерной цели полярность видеоимпульсов поля изменяется на противоположную, а длительность этих импульсов почти не изменится. При приеме эхо-сигнала цели вибратор антенны принимает каждый видеоимпульс эхосигнала дважды; сначала видеоимпульс прямой волны от цели, а за ним - видеоимпульс противоположной полярности отраженной от рефлектора волны. В результате одному зондирующему импульсу передатчика длительностью будут соответствовать четыре видеоимпульса длительностью эхо-сигнала цели на выходе приемника (см. фиг.2в). Два из этих четырех видеоимпульсов длительностью имеют отрицательную полярность, а два других положительную. Предлагается разделить друг от друга положительные и отрицательные видеоимпульсы эхо-сигналов цели на выходе приемника с помощью широкополосных диодов 7, 8 противоположной полярности и выделить из периодических напряжений положительных и отрицательных видеоимпульсов гармоники частоты следования зондирующих импульсов с помощью узкополосных фильтров 9, 10. Это можно сделать, так как видеоимпульсы на выходе диодов 7,8 периодические с частотой следования а фильтры настроены на частоту Эпюры напряжений на входах и выходах фильтров 9, 10 условно показаны на фиг.2г, д, е, ж. Проведенный анализ показал, что сдвиг фаз синусоидальных напряжений на выходах узкополосных фильтров 9, 10 зависит от угловой координаты цели Предлагается измерить этот сдвиг фаз с помощью фазометра 11, а результат измерения использовать для определения угла места цели Для обоснования возможности реализации предложенного устройства и его существенных отличительных признаков ниже приводятся необходимые математические соотношения. Синусоидальные напряжения частоты на выходах узкополосных фильтров 9, 10 определяются следующими соотношениями где - напряжение на выходе фильтра 9; - напряжение на выходе фильтра 10; - амплитудный коэффициент, одинаковый для обоих фильтров; - частота следования видеоимпульсов передатчика; - номер гармоники частоты настройки узкополосных фильтров; - длительность видеоимпульса сигнала передатчика; - время, отсчитываемое от начала первого видеоимпульса эхо-сигнала цели; - длительность видеоимпульса эхосигнала цели, определяемая соотношением (7). Соотношения (8), (9) получены путем представления рядом Фурье напряжений эхосигнала цели на входах узкополосных фильтров 9, 10 (см. фиг.2г, д) и выделения гармоники из этого ряда. Из (8), (9) можно получить следующее соотношение для сдвига фаз выходных напряжений узкополосных фильтров Этот сдвиг фаз содержит информацию об угловой координате цели которую предлагается определять с помощью вычисления 12 по соотношению (6), полученному из (7), (10). Ограничение (4) определяет размер антенны при заданной длительности видеоимпульса сигнала передатчика. Выполнение этого ограничения принципиально необходимо для того, чтобы, при сравнительно большой длительности видеоимпульса передатчика излучать в сторону цели видеоимпульса значительно меньшей длительности зависящий от направления излучения. Это позволяет упростить требования к передатчику и уменьшить необходимый размер антенны. Для однозначного измерения сдвига фаз выходных напряжений фильтров 9, 10 с помощью фазометра 11 необходимо, чтобы выполнялось условие Из соотношений (10), (7), (4) видно, что это условие будет выполнено при выполнении ограничения (5) на номер гармоники частоты настройки узкополосных фильтров. Поэтому выполнения ограничения (5) принципиально необходимо для обеспечения однозначности измерения сдвига фаз и возможности определения угловой координаты цели по этому сдвигу фаз. Из соотношения (8), (9) видно, что при высокой скважности сигнала передатчика напряжения на выходах узкополосных фильтров 9, 10 возрастают с уменьшением номера гармоники частоты настройки этих фильтров. Поэтому с энергетической точки зрения целесообразно настраивать эти фильтры на первую гармонику частоты (выбрать Однако при этом возрастают требования к точности фазометра 11, так как при уменьшении уменьшается интервал измеряемых сдвигов фаз Поэтому целесообразно выбирать частоту настройки узкополосных фильтров 9, 10 с обязательным выполнением ограничения (5), но с учетом возможностей используемого фазометра 11. Проведенные оценки показали, что при использовании современных и освоенных промышленностью фазометров предложенное устройство может обеспечить высокую точность определения угловой координаты цели при высокой частоте следования зондирующих видеоимпульсов. В предложенном устройстве целесообразно использовать передатчик с очень высокой частотой следования импульсов так как это увеличивает вероятность обнаружения цели и упрощает требования к фазометру и другим элементам предложенного устройства. Таким образом, предложенное устройство может быть практически реализовано, обеспечивает решение поставленной задачи, а отмеченные выше отличительные признаки являются существенными и принципиально необходимыми для реализации этого устройства. Основные элементы предложенного устройства на схеме фиг.1 выполнены следующим образом. Вибратор 1 выполнен в виде короткого проволочного вибратора, длина которого Фидерная линия 2 выполнена из двух коаксиальных кабелей одинаковой длины. Внутренние жилы этих кабелей подсоединены к концам вибратора 1, а наружные оболочки кабелей могут быть заземлены. Плоский металлический рефлектор 3 превышает размеры вибратора и расстояние от вибратора до рефлектора (это расстояние выбирают из ограничения (4)). Антенный переключатель 4 закорачивает вход приемника при излучении зондирующего видеоимпульса передатчика на время Передатчик 5 формирует несинусоидальный импульсный сигнал в виде периодической последовательности видеоимпульсов длительностью порядка нескольких десятков не без несущей частоты с высокой частотой F следования импульсов, которые излучает вибратор 1. Приемник 6 представляет широкополосный усилитель видеоимпульсов наносекундной длительности. Для усиления периодических видеоимпульсов с высокой частотой следования в этом приемнике можно использовать известный усилитель с обратной связью в виде линии задержки на период следования [1]. В качестве диодов 6, 7 целесообразно использовать широкополосные диоды с малым обратным током насыщения. Узкополосные фильтры 9, 10 одинаковы и настроены на частоту которую выбирают из ограничения (5). Фазометр 11 известен и выпускается промышленностью, а вычислитель 12 представляет собой микро-ЭВМ для вычисления угловой координаты цели по соотношению (6). Для подтверждения возможности практической реализации предложенного устройства ниже приводятся следующие расчетные параметры возможности варианта этого устройства: - длительность видеоимпульса сигналов передатчика частота следования видеоимпульсов передатчика - скважность сигнала передатчика полоса пропускания приемной и передающей систем радиолокатора от 5МГц до 1000МГц; - длина вибратора - расстояние от вибратора до рефлектора - размеры рефлектора 3 ´ 2м; - рабочий сектор измерения азимута цели - частота настройки узкополосных фильтров - полоса пропускания узкополосных фильтров не более 5МГц; - интервал измеряемых сдвигов фаз - допустимая погрешность фазометра не более ±2°; - погрешность измерения азимута цели не более Следует отметить, что по соотношению (6) можно определить угловую координату цели но неизвестен знак этого угла, то есть не известно, с какой стороны (слева или справа) от оси антенны находится цель. Такую информацию можно получить на других данных о цели, либо можно получить ее следующим образом. Следует повернуть антенну на небольшой угол в любую сторону. Если после этого длительность импульса эхо-сигнала цели увеличится, то цель находится в этой стороне, а если уменьшится - то в противоположной стороне. Динамика работы предложенного устройства осуществляется следующим образом. Передатчик 5 формирует, а вибратор 1 антенны излучает несинусоидальный импульсный сигнал в виде периодической последовательности видеоимпульсов поля радиоволн длительностью порядка десятков нс без несущей частоты с высокой частотой следования импульсов. Антенный переключатель4 закорачивает вход приемника во время излучения зондирующего импульса на время Радиоволны отражаются от рефлектора антенны 3 и импульс радиоволны изменяет свою полярность при отражении. Ввиду сравнительно небольшого расстояния между вибратором и рефлектором, импульсы прямой и отраженной от рефлектора в сторону цели радиоволн накладываются и частично подавляют друг друга. В результате антенна излучает в сторону цели видеоимпульсы сравнительно небольшой длительности и чередующейся полярности. Эти импульсы поля радиоволн отражаются от малоразмерной цели и возвращаются к антенне. При этом длительность импульсов эхо-сигнала зависит от угловой координаты цели и почти не изменяется при отражении от малоразмерной цели. При приеме вибратор антенны принимает каждый видеоимпульс эхо-сигнала дважды; сначала видеоимпульс прямой волны, а за ним импульс противоположной полярности отраженной от рефлектора волны. В результате одному зондирующему импульсу передатчика длительностью будут соответствовать на выходе приемника четыре более коротких видеоимпульса длительностью два из которых положительны, а два других - отрицательны. Положительные и отрицательные видеоимпульсы эхо-сигнала на выходе приемника 5 разделяют с помощью диодов 6, 7. Узкополосные фильтры 9, 10 выделяют из несинусоидальных выходных напряжений с выходов диодов 6, 7 синусоидальные напряжения на частоте Фазометр 12 измеряет сдвиг фаз этих напряжений, а вычислитель 12 вычисляет по результату измерения угловую координату цели с помощью соотношению (6). Таким образом, предложенное устройство решает поставленную задачу и обеспечивает измерение угловой координаты цели с требуемой точностью при использовании одной сравнительно небольшой антенны и передатчика со сравнительно большой длительностью зондирующих видеоимпульсов и высокой частоте следования этих видеоимпульсов.
ДивитисяДодаткова інформація
Назва патенту англійськоюTarget angular coordinate measuring device for sequential radar
Автори англійськоюZhukov Serhii Anatoliiovych
Назва патенту російськоюИзмеритель угловой координаты цели для секвентного радиолокатора
Автори російськоюЖуков Сергей Анатольевич
МПК / Мітки
МПК: G01S 17/06
Мітки: секвентного, цілі, координати, радіолокатора, вимірювач, кутової
Код посилання
<a href="https://ua.patents.su/5-17470-vimiryuvach-kutovo-koordinati-cili-dlya-sekventnogo-radiolokatora.html" target="_blank" rel="follow" title="База патентів України">Вимірювач кутової координати цілі для секвентного радіолокатора</a>
Спосіб вимирювання кута місця цілі для наземного секвентного радіолокатора
Номер патенту: 13417
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Родін Олександр Валерійович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: спосіб, наземного, кута, місця, секвентного, радіолокатора, вимірювання, цілі
Формула / Реферат:
Способ измерения угла места цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульса поля радиоволн наносекундной длительности без несущей частоты и приеме эхо-сигналов воздушной цели, отличающийся тем, что вместе с целью облучают земную поверхность, измеряют время запаздывания t3 друг относительно друга отрицательных видеоимпульсов эхо-сигнала цели и длительность t отрицательного...
Спосіб вимірювання кутових координат цілі для наземного секвентного радіолокатора
Номер патенту: 13419
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: секвентного, спосіб, вимірювання, цілі, координат, радіолокатора, кутових, наземного
Формула / Реферат:
Способ измерения угловых координат цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты и приеме видеоимпульсов эхо-сигнала воздушной цели, отличающийся тем, что излучение и прием осуществляют с помощью одной приемо-передающей вибраторной антенны с плоским металлическим рефлектором, наблюдают принятые видеоимпульсы...
Радіолокаційний вимірювач кута місця цілі
Номер патенту: 13421
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Жуков Сергій Анатолійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: місця, радіолокаційний, цілі, кута, вимірювач
Формула / Реферат:
Радиолокационный измеритель угла места цели, содержащий передатчик, приемник, индикатор и приемо-передающую антенну с антенным переключателем, согласно изобретению передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, антенна выполнена в виде вибраторной решетки с плоским металлическим рефлектором, в которой расстояние между вибраторами по высоте равно высоте h подъема нижнего...
Спосіб вимірювання кутових координат цілі
Номер патенту: 13420
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: цілі, координат, вимірювання, спосіб, кутових
Формула / Реферат:
Способ измерения угловых координат цели, заключающийся в излучении и приеме периодических импульсных зондирующих сигналов с помощью одной зеркальной параболической антенны с облучателем в виде вибратора с плоским контррефлектором, отличающийся тем, что излучают несинусоидальные импульсные сигналы длительностью t0 порядка 0,1-1 нс без несущей частоты, измеряют длительность импульса t эхо-сигнала цели и время запаздывания t3 двух...
Вимірювач азимуту і кута місця для трикоординатної рлс
Номер патенту: 13418
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: вимірювач, рлс, місця, азимуту, кута, трикоординатної
Формула / Реферат:
Измеритель азимута и угла места для трехкоординатной РЛС, содержащий передатчик с передающей антенной, приемник и индикатор, отличающийся тем, что передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, приемная антенна выполнена в виде вибраторной антенной решетки с уголковым рефлектором из двух взаимно перпендикулярных проводящих плоскостей, в которой удаление ближнего вибратора от...
Попередній патент: Пристрій для очистки внутрішньої поверхні трубопроводу
Наступний патент: Бортовий секвентний радіолокатор виявлення об’єктів поблизу земної поверхні
Випадковий патент: Спосіб визначення хлоропіраміну гідрохлориду методом газорідинної хроматографії