Пристрій дистанційної електростиковки

Формула / Реферат
1. Устройство дистанционной электростыковки, включающее манипулятор, привод, захват, полумуфту, отличающееся тем, что манипулятор выполнен, по крайней мере, из двух навитых на барабаны упругих элементов.
2. Устройство по п. 1, отличающееся тем, что привод выполнен в виде неполноповоротного лопастного гидромотора, поворотная часть которого соединена с барабанами.
3. Устройство по пп. 1 и 2, отличающееся тем, что захват выполнен, по крайней мере, из двух соединенных между собой крючьев.
Текст
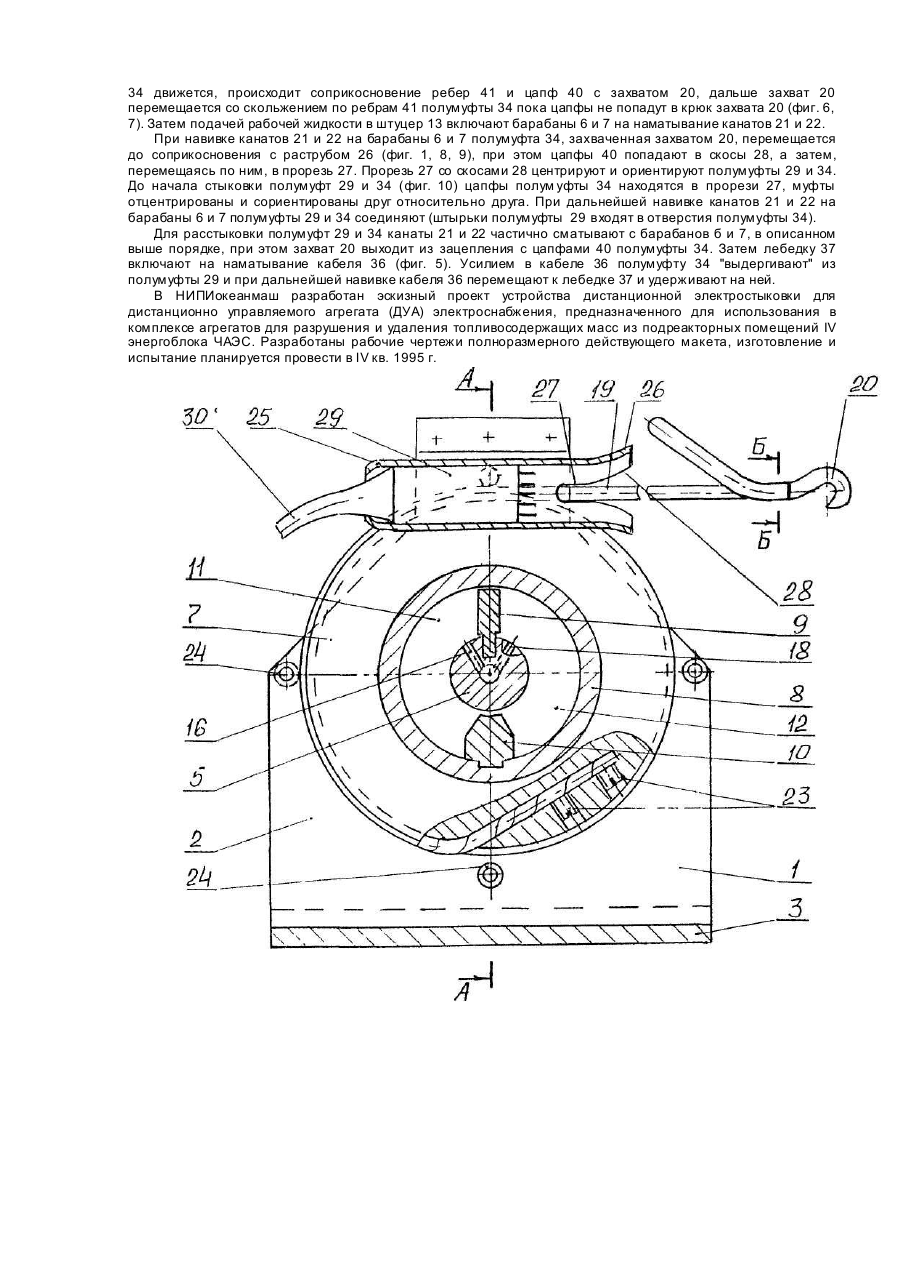
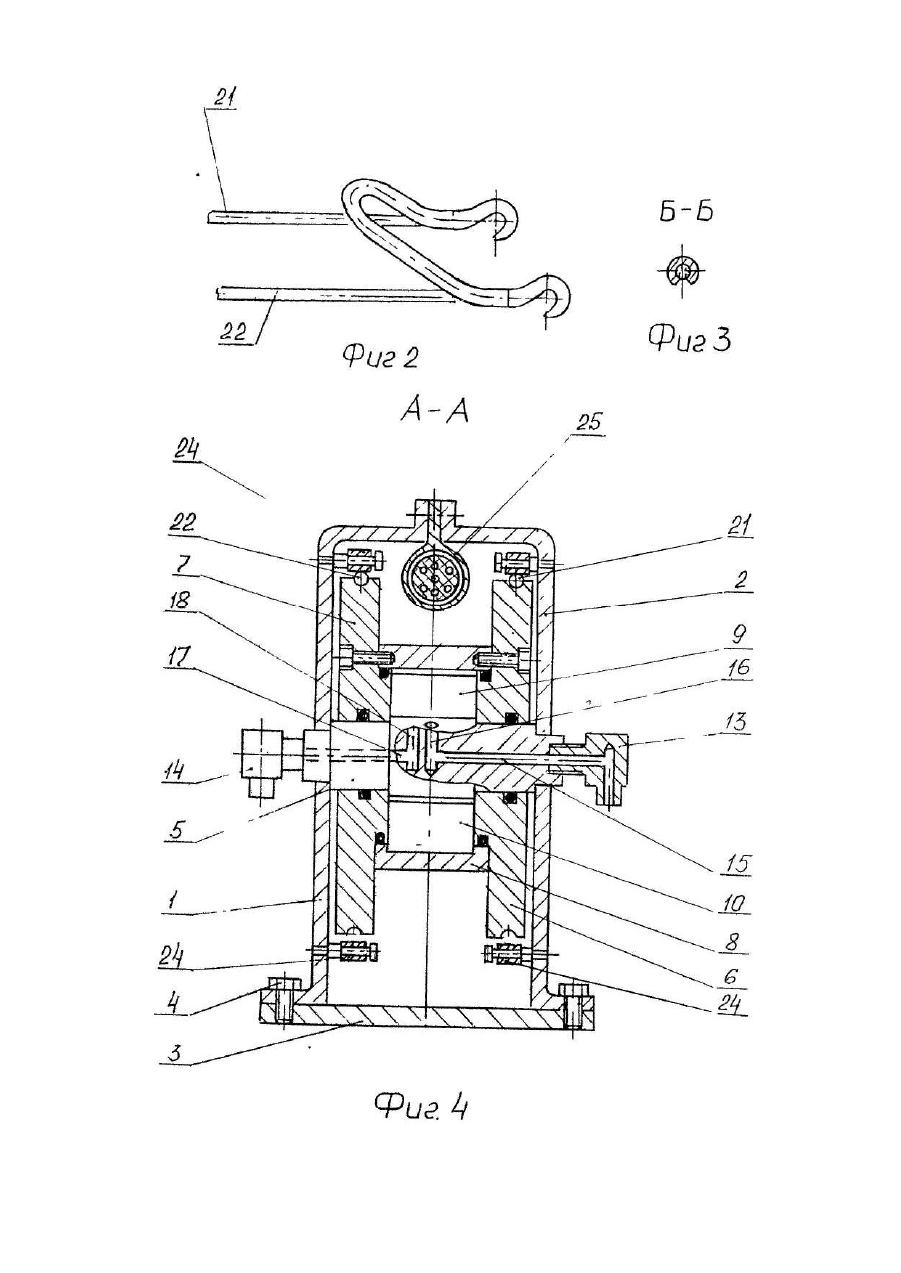
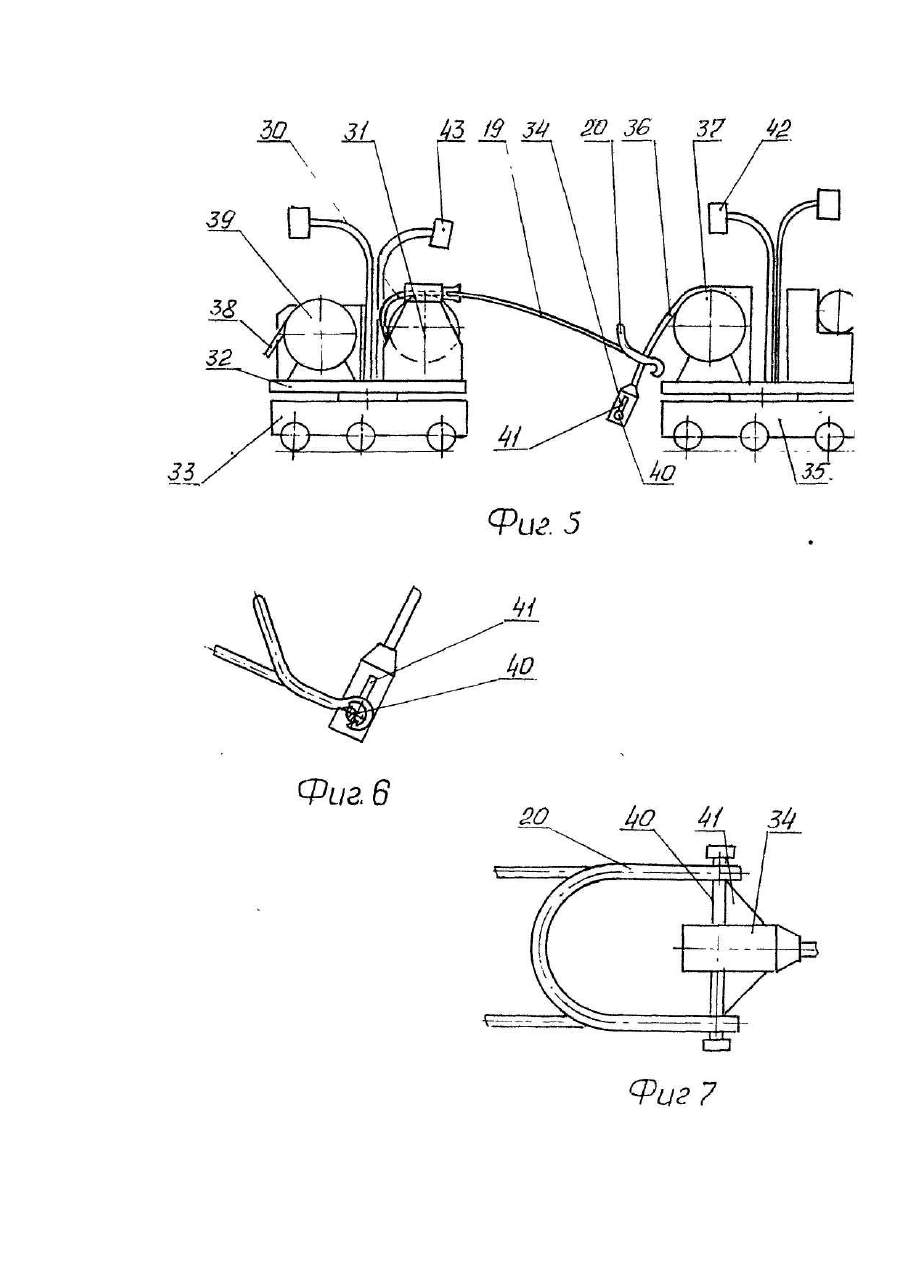
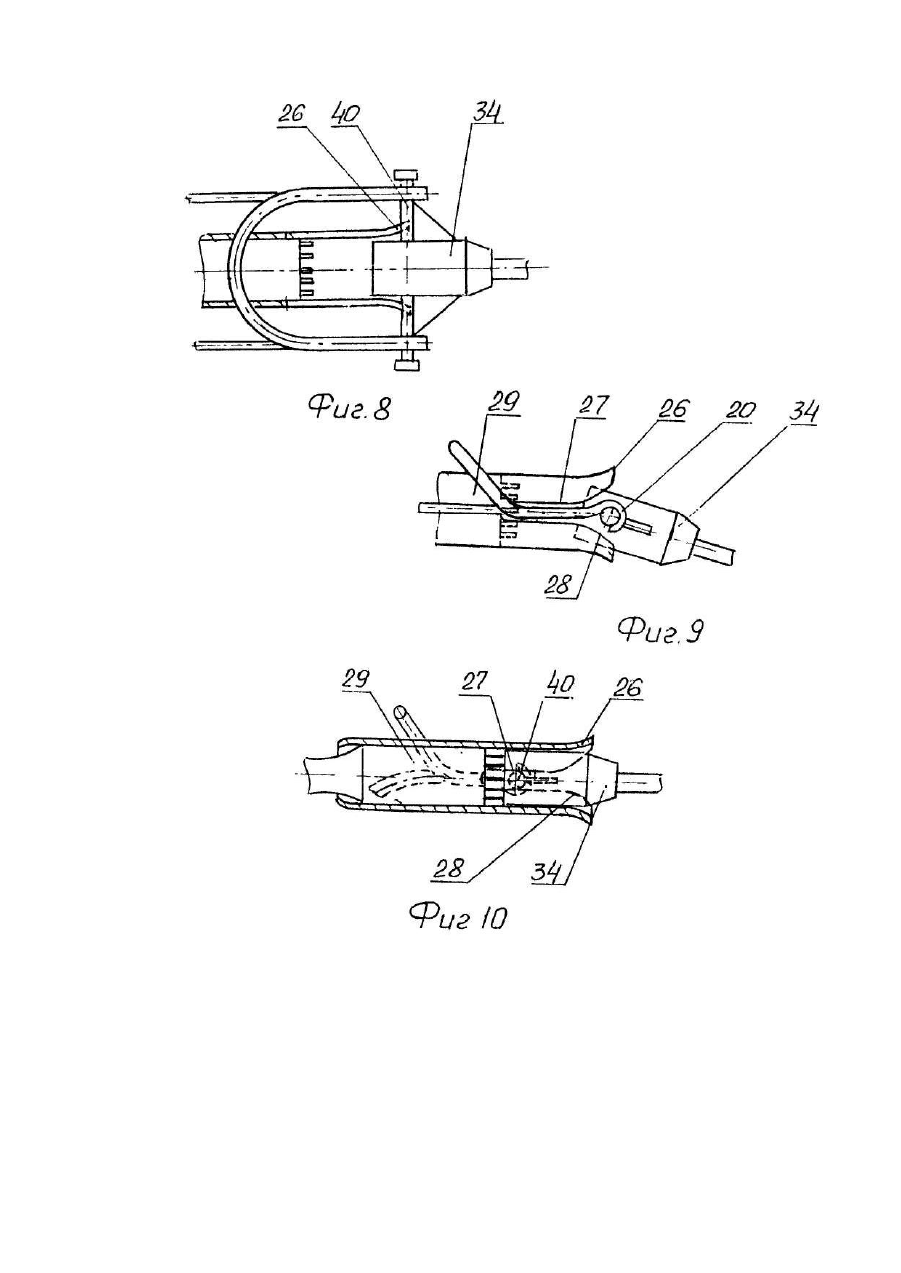
Изобретение относится к горным, строительным и дорожным машинам, питающимся и управляемым по кабелю, работающему в недоступных для человека зонах (радиоактивных, зараженных, загазованных, подводных и т.д). Известны установки, которые могут обеспечить дистанционную электростыковку, такие, как универсальный электромеханический манипулятор, включающий опору, манипулятор, захват (Попов Ε П. Робототехника и гибкие производственные системы. М., На ука, 1987, с. 106). Недостатком установок такого типа является их громоздкость, сложность в управлении, что практически не позволяет использовать установку на малогабаритных агрегатах, работающих в помещениях, требующи х установки нескольких таких манипуляторов. Наиболее близким к предлагаемому изобретению является манипулятор, который можно использовать для стыковки, по патенту США №3615067 (Владов И.Л., Данилевский В.Н., Ионов П.Б. и др, Под ред. Белянина П.Н. Сбалансированные манипуляторы. - М.: Машиностроение, 1988. - С.70) - прототип. Установка манипулятора включает манипулятор (шарнирно соединенные рычаги), захватное устройство, привод, каретку, стойку, поворотную колонну Недостатком такой конструкции является ее многозвенность, отсутствие гибкости манипулятора, громоздкость, сложность в управлении, что также не позволяет использовать ее на малогабаритных установках. Для устранения указанных недостатков необходимо решить основную техническую задачу - уменьшить габариты, упростить управление и конструкцию установок, что обеспечит возможность использования устройства дистанционной стыковки на небольших самоходных установках, в помещениях {например, в подреакторных помещениях IV энергоблока ЧАЭС), недоступных для человека. Для решения поставленной задачи предлагается устройство дистанционной электростыковки, включающее манипулятор, привод, захват и полумуфту. Новым в предлагаемом устройстве является то, что манипулятор выполнен, по крайней мере, из двух навитых на барабаны упруги х элементов, привод выполнен в виде неполноповоротного лопастного гидромотора, поворотная часть которого соединена с барабанами, кроме того, захват выполнен по крайней мере из двух соединенных между собой крючьев. На фиг. 1 показан продольный разрез устройства дистанционной электростыковки; на фиг. 2 - захват в аксонометрии; на фиг. 3 - сечение Б-Б по захвату в месте соединения захвата с канатом; на фиг. 4 поперечное сечение устройства дистанционной электростыковки; на фиг. 5 - процесс электростыковки в начальной стадии; на фиг. 6 -захватывание полумуфты захватом, вид сбоку; на фиг. 7 - захватывание полумуфты захватом, вид сверху; на фиг. 8 - вход полумуфты в раструб, вид сверху; на фиг. 9 -вход полумуфты в растр уб, вид сбоку; на фиг. 10 - соединение полумуфт. Устройство дистанционной электростыковки состоит из корпуса 1 {фиг. 1,4), состоящего из боковин 2 и основания 3, соединенных между собой винтами 4. На боковинах 2 неподвижно установлен вал 5, на котором собраны с возможностью поворота два барабана. 6 и 7, соединенные с корпусом 6. На валу жестко посажена лопасть 9, а в корпусе 8 жестко закреплен упор 10. Детали 5, 6,7, S, 9 образуют неполноповоротный лопастной гидродвигатель с полостями 11» 12. На торцах вала 5 закреплены штуцеры 13, 14. Каналы штуцера 13 соединяются с каналом 15 в валу 5, который переходит в канал 16, выходящий по одну сторону лопасти 9 в полость 11. Канал штуцера 14 соединяется с каналом t7 в валу 5, который переходит в канал 18, выходящий по другую сторону лопасти 9 в полость 12. Устройство имеет гибкий манипулятор 19, состоящий из захвата 20.(фиг. 1,2) и двух отрезков каната 21 и 22, навитых на барабаны 6 и 7, концы которых соответственно закреплены на барабанах винтами 23 (фиг. 1). На боковинах 2 установлены ролики 24, контактирующие с отрезками каната 21 и 22, навитыми на барабаны 6 и 7. В верхней части корпуса 1 между боковинами 2 и барабанами 6 и 7 установлен муфтодержатель 25 (фиг. 1, 4) с растр убом 26 в передней части и прорезью 27 с двух сторон, расширяющуюся к передней части муфтодержателя 25 и с образованием скосов 28. В муфтодержателе 25 установлена стационарная полумуфта 29, соединенная со стационарным кабелем 30. Устройство дистанционной электростыковки 31 (фиг. 5) установлено на поворотном круге 32 самоходного агрегата электроснабжения 33 (фиг. 5). Полумуфта 34 рабочего агрегата 35, с которым осуществляют электрическую стыковку агрегата электроснабжения 33, закреплена на отрезке кабеля 36, навитом на барабан маневровой лебедки 37, установленной на рабочем агрегате 35. После стыковки электроснабжение (и управление) рабочиморганом осуществляются по кабелю 38 (фиг. 5), навитому на барабан кабельной лебедки 39 агрегата электроснабжения 33, через устройство дистанционной электростыковки 31, полумуфты 29 {фиг. 1) и 34 (фиг. 5), отрезок кабеля 36 и маневровую лебедку 37. Для обеспечения захвата полумуфты 34 и ее фиксации на ней выполнены цапфы 40 с ребрами 41 (фиг. 5-10). Агрегаты 33 и 35 снабжены телекамерами 42 и 43. Устройство дистанционной электростыковки работает следующим образом. Взаимными маневрами агрегаты 33 и 35 (фиг. 5) располагают друг возле друга на расстоянии длины манипулятора 19. Через штуцер 14 (фиг. 4) от насосной станции агрегата электроснабжения 33 (фиг. 5) подают масло под давлением по каналам 17 и 18 (фиг. 1,4). Оно поступает в полость 12, воздействует на упор 10 и поворачивает корпус 8 с барабанами б и 7 по часовой стрелке (фиг. 1). Из полости 11 масло вытесняется упором 10 через каналы 15,16 и штуцер 13 на слив. При повороте барабанов 6 и 7 канаты 21 и 22 (фиг. 4} манипулятора 19 сматывают с барабанов, захват 20 перемещается к рабочему агрегату 35 (фиг. 5), ролики 24 препятствуют распушиванию каната на барабанах. Маневровую лебедку 37 агрегата 35 включают на разматывание кабеля 36, полумуфта 34 опускается вниз. С помощью поворотного круга 32 ось манипулятора 19 устанавливают в одной плоскости с осью кабеля 36. При дальнейшем сматывании канатов 21 и 22 манипулятора 19 с барабанов 6 и 7 кабель 36 попадает в вилку захвата 20 (фиг. 5). После этого кабель 36 навивают на маневровую лебедку 37, при этом полумуфта 34 движется, происходит соприкосновение ребер 41 и цапф 40 с захватом 20, дальше захват 20 перемещается со скольжением по ребрам 41 полумуфты 34 пока цапфы не попадут в крюк захвата 20 (фиг. 6, 7). Затем подачей рабочей жидкости в штуцер 13 включают барабаны 6 и 7 на наматывание канатов 21 и 22. При навивке канатов 21 и 22 на барабаны 6 и 7 полумуфта 34, захваченная захватом 20, перемещается до соприкосновения с раструбом 26 (фиг. 1, 8, 9), при этом цапфы 40 попадают в скосы 28, а затем, перемещаясь по ним, в прорезь 27. Прорезь 27 со скосами 28 центрируют и ориентируют полумуфты 29 и 34. До начала стыковки полумуфт 29 и 34 (фиг. 10) цапфы полум уфты 34 находятся в прорези 27, муфты отцентрированы и сориентированы друг относительно друга. При дальнейшей навивке канатов 21 и 22 на барабаны 6 и 7 полумуфты 29 и 34 соединяют (штырьки полумуфты 29 входят в отверстия полумуфты 34). Для расстыковки полумуфт 29 и 34 канаты 21 и 22 частично сматывают с барабанов б и 7, в описанном выше порядке, при этом захват 20 выходит из зацепления с цапфами 40 полумуфты 34. Затем лебедку 37 включают на наматывание кабеля 36 (фиг. 5). Усилием в кабеле 36 полумуфту 34 "выдергивают" из полумуфты 29 и при дальнейшей навивке кабеля 36 перемещают к лебедке 37 и удерживают на ней. В НИПИокеанмаш разработан эскизный проект устройства дистанционной электростыковки для дистанционно управляемого агрегата (ДУА) электроснабжения, предназначенного для использования в комплексе агрегатов для разрушения и удаления топливосодержащих масс из подреакторных помещений IV энергоблока ЧАЭС. Разработаны рабочие чертежи полноразмерного действующего макета, изготовление и испытание планируется провести в IV кв. 1995 г.
ДивитисяДодаткова інформація
Автори англійськоюKuzminskyi Vitalii Pavlovych
Автори російськоюКузьминский Виталий Павлович
МПК / Мітки
Мітки: електростиковки, дистанційно, пристрій
Код посилання
<a href="https://ua.patents.su/5-17667-pristrijj-distancijjno-elektrostikovki.html" target="_blank" rel="follow" title="База патентів України">Пристрій дистанційної електростиковки</a>
Пристрій для дистанційної дефектоскопії
Номер патенту: 1283
Опубліковано: 30.12.1993
Автор: Сафронов Григорій Степанович
МПК: G01N 21/39, G01N 21/88, G01N 29/04
Мітки: дефектоскопії, дистанційно, пристрій
Формула / Реферат:
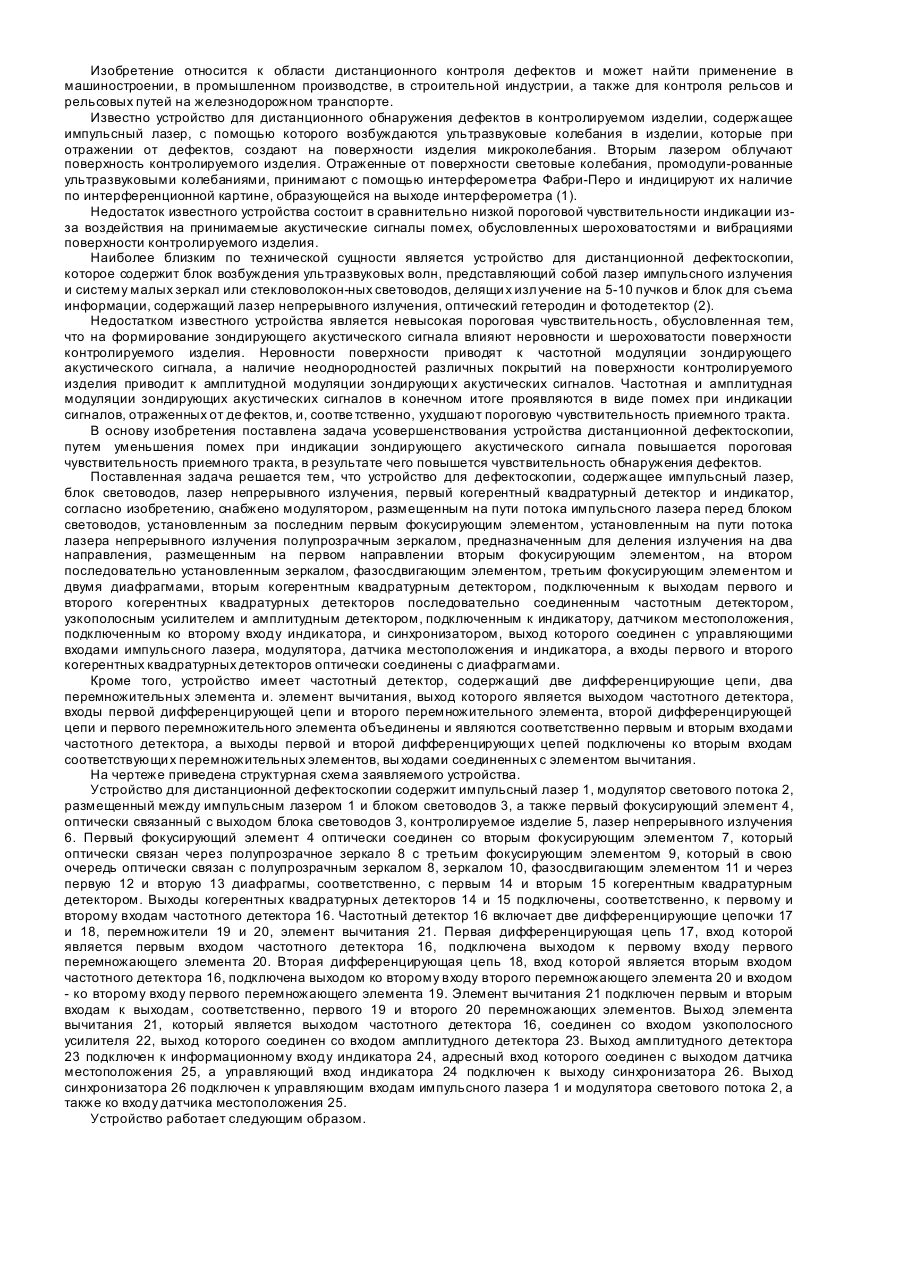
1. Устройство для дистанционной дефектоскопии, содержащее импульсный лазер, блок световодов, лазер непрерывного излучения, первый когерентный квадратурный детектор и индикатор, отличающееся тем, что оно снабжено модулятором, размещенным на пути потока импульсного лазера перед блоком световодов, установленным за последним первым фокусирующим элементом, установленным на пути потока лазера непрерывного излучения полупрозрачным зеркалом,...
Пристрій для кріплення акумуляторної батареї транспортного засобу

Номер патенту: 8768
Опубліковано: 30.09.1996
Автор: Нємий Степан Володимирович
МПК: B60R 16/04
Мітки: акумуляторної, кріплення, транспортного, батареї, пристрій, засобу
Формула / Реферат:
Устройство для крепления аккумуляторной батареи транспортного средства, содержащее корпус держателя с элементами фиксации для взаимодействия с выступами в нижней части аккумуляторной батареи и захват с крепежным элементом, отличающееся тем, что, с целью упрощения конструкции и повышения надежности эксплуатации, корпус держателя выполнен в виде боковых направляющих, образованных уголковым профилем и ребрами для взаимодействия с боковыми...
Пристрій для монтажу збірного кріплення тунелів
Номер патенту: 11782
Опубліковано: 25.12.1996
Автори: Мірошников Юрій Миколайович, Мельников Іван Йосипович, Фішман Йосип Давидович, Зенін Костянтин Михайлович, Татаринський Володимир Борисович
МПК: E21D 11/00
Мітки: збірного, кріплення, тунелів, монтажу, пристрій
Формула / Реферат:
1. Устройство для монтажа сборной обделки тоннелей, включающее тележку и манипулятор, состоящий из двух звеньев, установленных на поворотном валу, и имеющий захват для элементов сборной обделки, отличающееся тем, что, с целью повышения эффективности монтажа обделки путем совмещения операций разработки забоя с удалением породы и монтажом обделки, звенья манипулятора соединены между собой посредством валика, ось которого параллельна оси...
Пристрій управління промисловим роботом для зняття відливок машини лиття під тиском
Номер патенту: 7416
Опубліковано: 29.09.1995
Автори: Богушевський Володимир Святославович, Присяжнюк Ігор Вікторович, Церковницький Микола Сергійович, Сорокін Микола Олександрович
МПК: B22D 17/32
Мітки: машини, роботом, промисловим, зняття, пристрій, тиском, управління, лиття, відливок
Формула / Реферат:
Устройство управления промышленным роботом для съема отливок машины литья под давлением, содержащее манипулятор с механическим захватом, снабженный программным контроллером, соединенным с датчиком объема отливки и с устройством управления циклом машины литья под давлением, отличающееся тем, что, с целью повышения КПД и надежности в работе устройства, оно дополнительно содержит датчики массы дозируемого в пресс-камеру металла и длины...
Пристрій для розфасовки сипких продуктів
Номер патенту: 12929
Опубліковано: 28.02.1997
Автори: Копак Мирослав Петрович, Копак Надія Петрівна
МПК: B65B 1/10
Мітки: розфасовки, пристрій, продуктів, сипких
Формула / Реферат:
(57) Устройство для расфасовки сыпучих продуктов, содержащее бункер, в нижней части которого размещена дозирующая камера со смонтированным в ней на валу шнеком, установленную на выходном конце шнека заслонку, привод и переключатель шнека счетного типа, отличающееся тем, что переключатель содержит верти кальный цилиндрический Kopnyfe с продольными пазами, установленную в корпусе с возможностью возвратно-поступательного перемещения пустотелую...
Попередній патент: Сифон
Наступний патент: Лебідка кабельна
Випадковий патент: Установка для сушіння сільськогосподарських продуктів