Пристрій для немеханічного різання
Номер патенту: 18784
Опубліковано: 25.12.1997
Автори: Смола Володимир Миколайович, Білайгород Леонід Михайлович, Цатуров Гєрбєрт Робєртовіч, Больбот Олександр Кіндратович, Туркот Віктор Володимирович, Стародубцева Тамара Костянтинівна

Формула / Реферат
Устройство для немеханической резки листовых материалов, содержащее подвижный модуль резака, модуль энергетического обеспечения, гибкие энергопроводы для подвода энергоносителя к резаку, размещенные в жестком кожухе, шарнирно закрепленном относительно модуля энергетического обеспечения и установленном с возможностью взаимодействия с механизмом ограничения его перемещения, и установленные с зазором между жестким кожухом и местом их соединения с резаком, и систему управления, отличающееся тем, что шарнирное соединение жесткого кожуха выполнено в виде кардана из трех концентрично расположенных в горизонтальной плоскости рамок, из которых две внутренние установлены с возможностью поворота вокруг взаимно перпендикулярных осей кардана, при этом механизм ограничения перемещения жесткого кожуха выполнен в виде пар точечных бесконтактных датчиков, установленных в точках наибольшего радиуса поворота рамок с возможностью взаимодействия с экранами, закрепленными на сопрягаемых рамках кардана, при этом направления осей подвески рамок кардана совпадают с направлениями продольного и поперечного перемещении модулей резака и энергетического обеспечения.
Текст
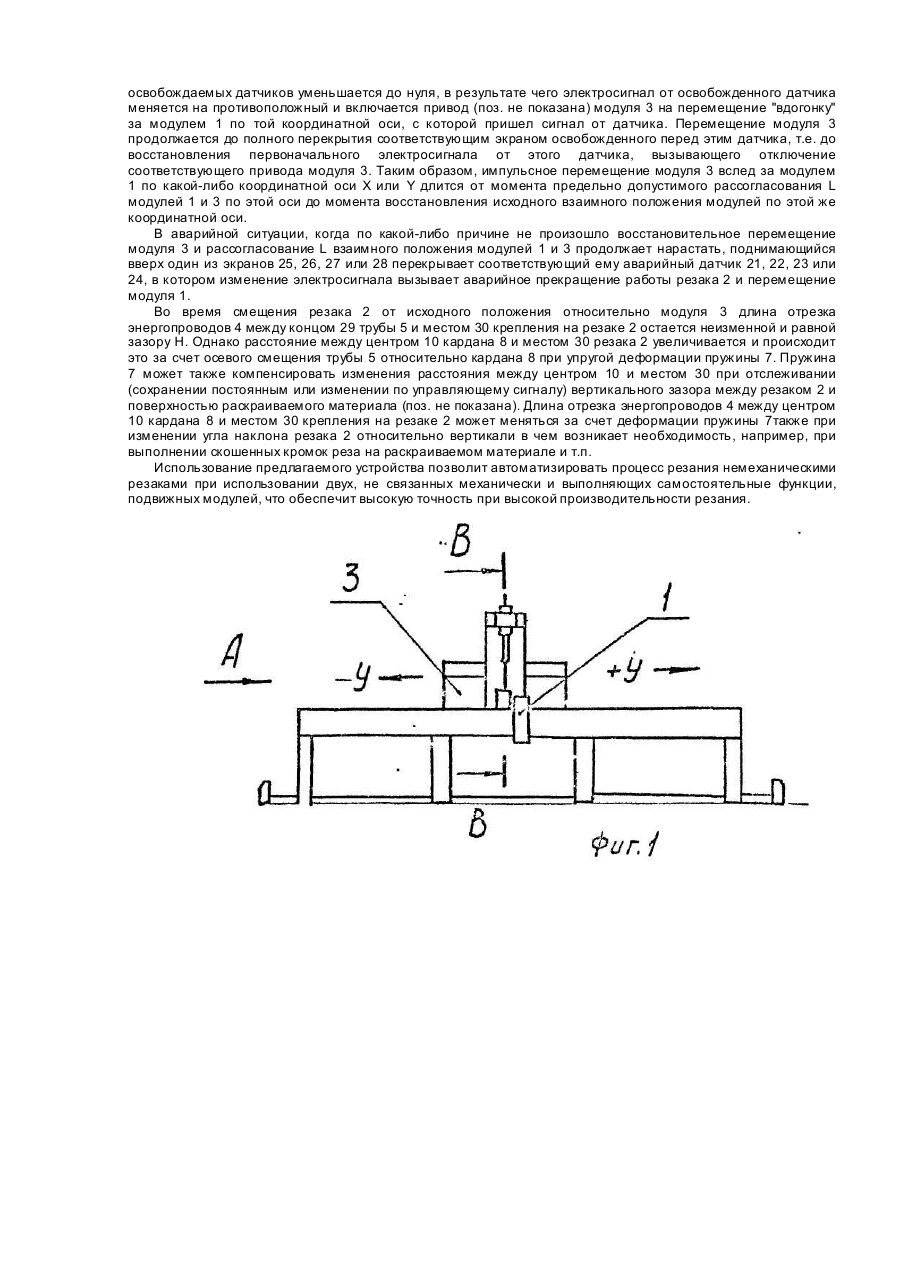
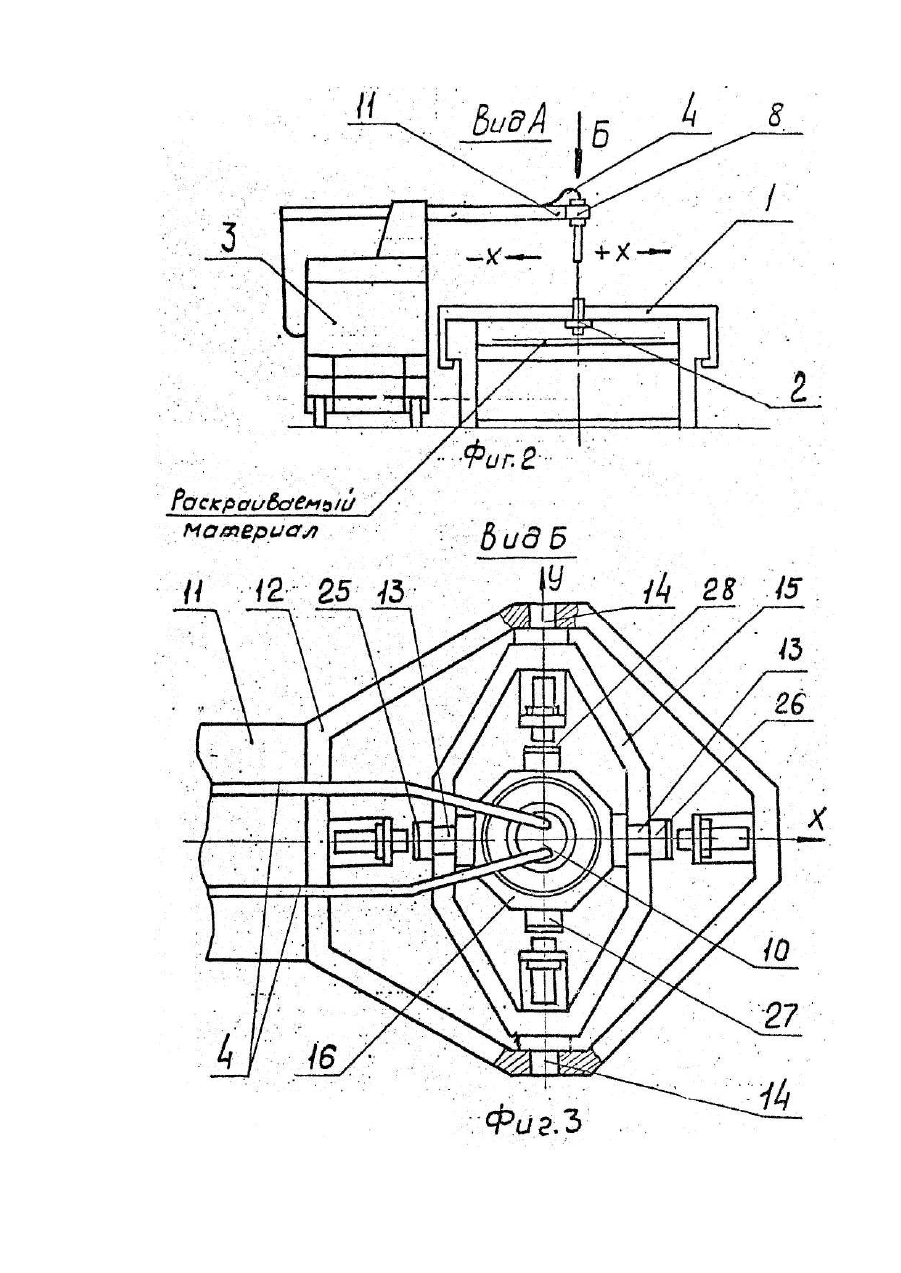
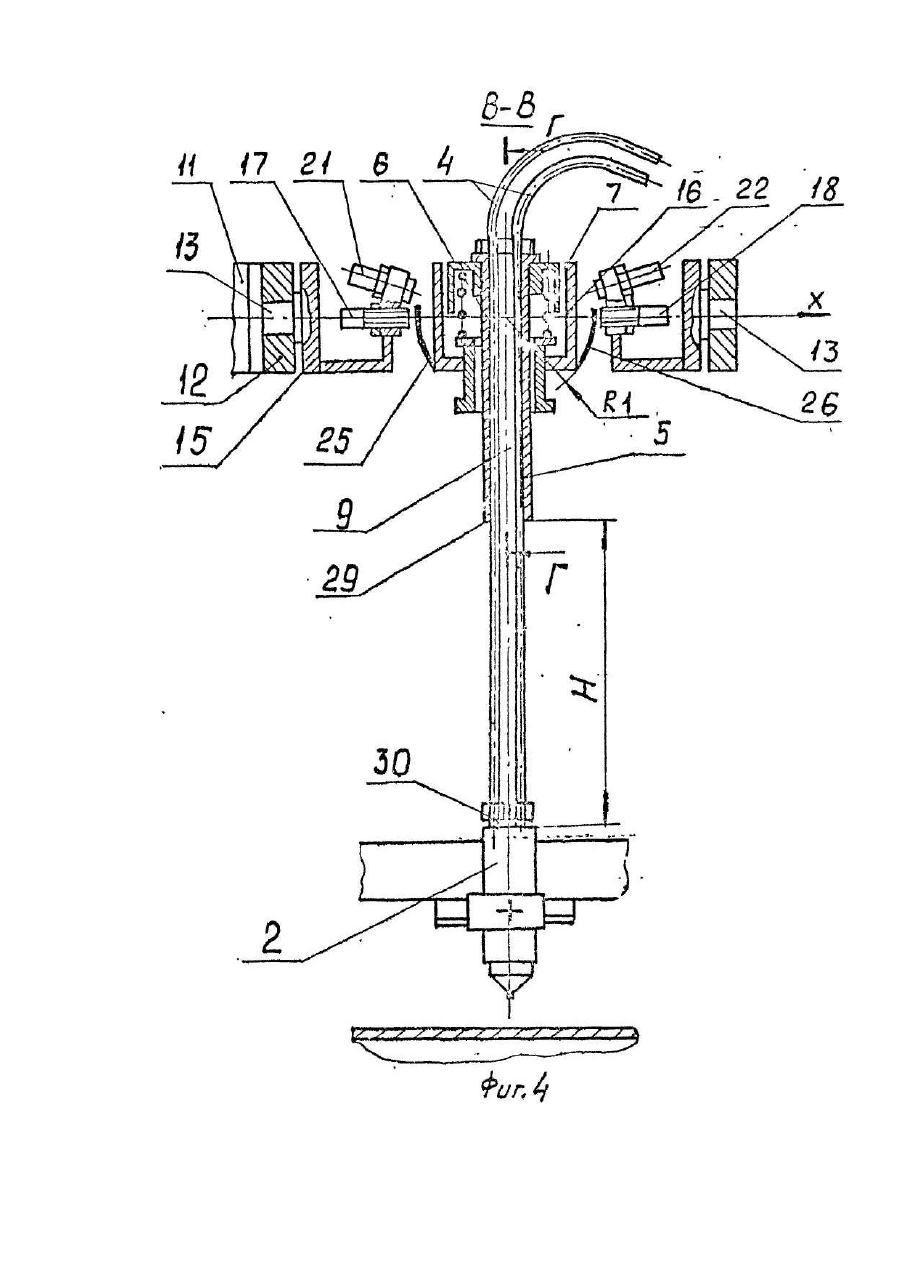
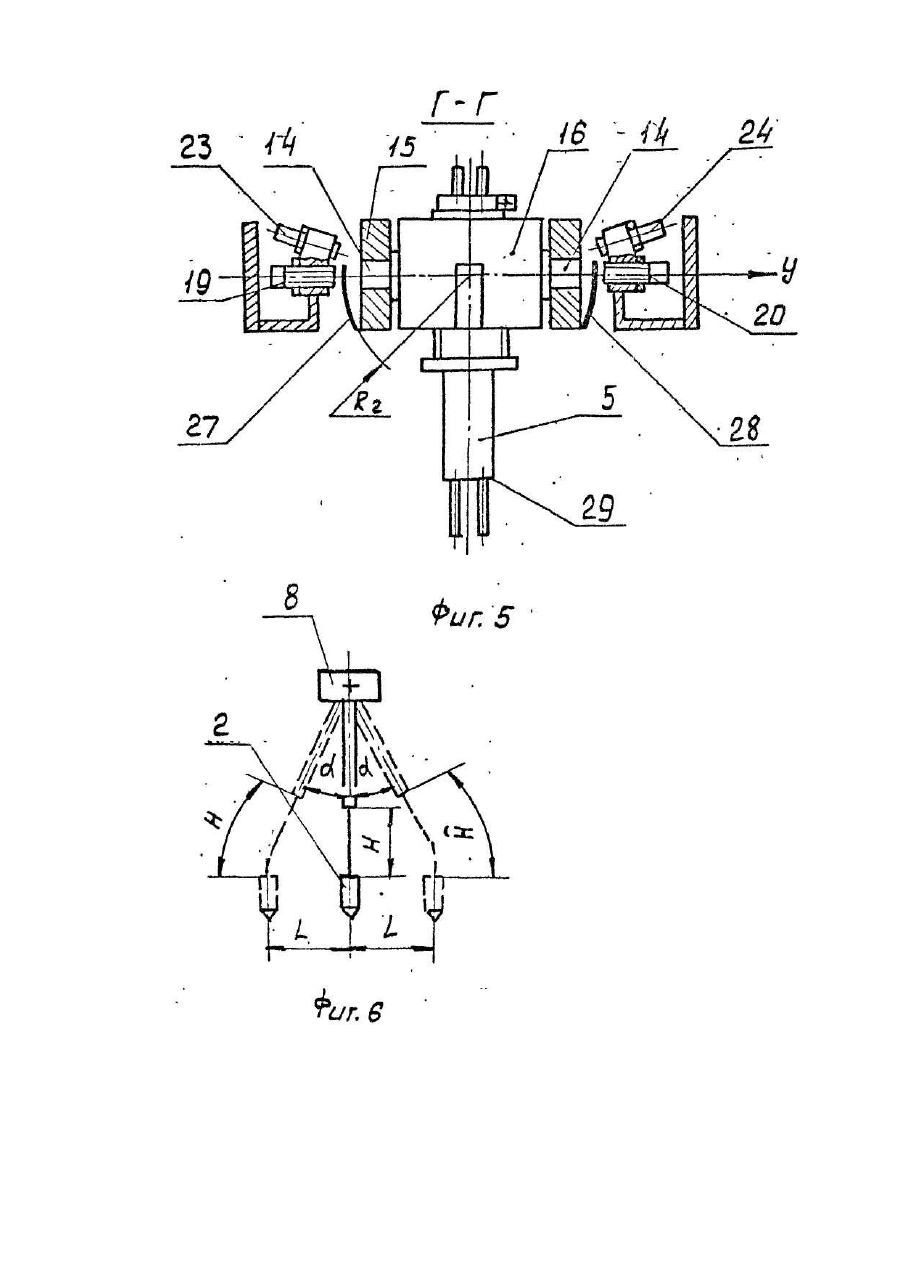
Изобретение относится к раскрою листовых материалов в машиностроении и может быть использовано в любых отраслях промышленности. Известно устройство для гидроструйной резки листовых материалов, содержащее подвижный в горизонтальной плоскости модуль резака с гидрорезаком, модуль энергетического обеспечения и соединяющие их гибкие энергопроводы [1]. В известном устройстве модуль энергетического обеспечения установлен стационарно. Поэтому потребность в гибких участках энергопроводов возникает дважды: для передачи энергии от стационарного модуля энергообеспечения на металлоконструкцию модуля резака, перемещающуюся вдоль раскраиваемого листа, а затем отсюда - на перемещающийся поперек раскраиваемого листа гидрорезак. Такая система передачи энергии громоздка и при больших размерах раскраиваемого листа, что связано с соответственно большими продольными и поперечными ходами модуля резака, может обладать большими массами энергопроводов, что вызывает увеличение масс и мощностей модуля резака, а в конечном результате ведет к росту его инерционности, к снижению точности резания. Известно также устройство для немеханической резки листовых материалов, содержащее подвижный модуль резака, модуль энергетического обеспечения, гибкие энергопроводы для подвода энергоносителя к резаку, размещенные в жестком кожухе, шарнирно закрепленном относительно модуля энергетического обеспечения и установленном с возможностью взаимодействия с двумя боковыми упорами; при этом между жестким кожухом и местом крепления гибких энергопроводов на резаке выполнен зазор [2]. Однако в известном устройстве жесткий кожух для энергопроводов представляет собой горизонтальную консоль, поворачиваемую относительно вертикальной оси шарнирного закрепления, а в зазоре между жестким кожухом и местом крепления гибких энергопроводов на резаке гибкие энергопроводы свернуты в цилиндрическую спираль по типу вертикально подвешенной пружины растяжения. Необходимость растяжения отклоненной от вертикального положения спирали гибких энергопроводов во время работы устройства создает непостоянные по величине и направлению в горизонте боковые нагрузки на резак; непостоянство усиливается инерционностью жесткого кожуха, требующего поворота в горизонте вслед за перемещающимся резаком. Целью изобретения является повышение точности резания. Поставленная цель достигается тем, что шарнирное соединение жесткого кожуха выполнено в виде кардана из трех концентрично расположенных в горизонтальной плоскости рамок, из которых две внутренние установлены с возможностью поворота вокруг взаимно перпендикулярных осей кардана, при этом механизм ограничения перемещений жесткого кожуха выполнен в виде пар точечных бесконтатных датчиков, установленных в точках наибольшего радиуса поворота рамок с возможностью взаимодействия с экранами, закрепленными на сопрягаемых рамках кардана, при этом направления осей подвески рамок кардана совпадают с направлениями продольного и поперечного перемещений модулей резака и энергетического обеспечения, На фиг. 1 показано устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - разрез Г-Т на фиг. 4; на фиг. 6 - схема зависимости угла отклонения энергопроводов в точке подвеса от хода рассогласования модулей. Устройство для немеханической резки листовых материалов состоит из модуля 1 резака с резаком 2, модуля 3 энергетического обеспечения и гибких энергопроводов 4, закрепленных в жесткой трубе 5 и соединяющих модули 1 и 3 между собой. Верхний конец 6 трубы 5 подвешен на пружине 7 к кардану 8 таким образом, что ось 9 трубы 5 проходит через центр 10 кардана 8. Кардан 8 закреплен на металлоконструкции 11 модуля 3 энергообеспечения своей рамкой 12, внутри которой на цапфах 13 и 14 шарнирно закреплены рамки 15 и 16, Оси цапф 13 и 14 ориентированы по осям X и Y, т.е. в направлениях продольного и поперечного перемещений модулей 1 и 3. и перес9каются в центре 10 кардана 8. В местах наибольших радиусов R1 и R2 поворота рамок 15 и 16 закреплены рабочие 17, 18 (по оси X) и 19, 20 (по оси Y), а также расположенные над ними аварийные 21, 22 (по оси X) и 23, 24 (по оси Y) точечные бесконтактные датчики и взаимодействующие с ними экраны 25, 26 (по оси X) и 27, 28 (по оси Y). Между нижним концом 29 трубы 5 и местом 30 крепления гибких энергопроводов 4 на резаке 2 оставлен зазор Н. Резаком 2 могут выполняться следующие способы немеханической резки; гидроструйная (струей чистой жидкости или с добавлением в струю абразивного песка), тепловая (газовая, плазменная, лазерная) и т.д. Устройство работает следующим образом. В исходном положении, перед началом работы механизмы модуля 3 энергообеспечения без сдвижек относительно соответствующих механизмов модуля 1 резака. Отрезок трубы 5 вертикален, поскольку место 30 крепления энергопроводов 4 к резаку 2 расположено в проекции кардана 8 на горизонтальную плоскость. Все рабочие датчики 17, 18, 19, 20 равномерно и одинаково перекрыты экранами 25, 26, 27, 28. Аварийные датчики 21, 22, 23, 24 не перекрываются экранами. Рамки 15 и 16 находятся в горизонтальной плоскости. С включением резака 2 в работу модуль 1 начинает перемещать его в горизонтальной плоскости по заданной линии реза (не показана). В общем случае резак 2 перемещается одновременно по двум координатным осям X и Y, возможно с преобладанием одного из направлений. Нижний конец 29 трубы 5 уходит от своего исходного положения, следуя за упруго изгибающимся отрезком Н, энергопроводов 4, При этом труба 5 поворачивается итносительно центра 10 кардана 8 и ее ось 9 образует угол а с вертикалью, поскольку модуль 3 энергообеспечения, на металлоконструкции 11 которого закреплена наружная рамка 12 кардана 8, остается неподвижным. Поворот трубы 5, вер хний конец 6 которой соединен с карданом 8, вызывает повороты рамок 15 и 16 на цапфах 13 и 14. Экраны 25, 26,27,28 смещаются в вертикальных плоскостях, проходящих через оси X и Y, относительно датчиков 17, 18, 19, 20 таким образом, что одни из датчиков остаются перекрытыми экранами, а от други х экраны уходят вниз, уменьшая их зону перекрытия. Когда смещение резака 2 с модулем 1 по какой-либо оси X или Υ от исходного положения, т.е. о тносительно модуля 3, достигнет заранее установленной предельно допустимой величины L, зоны перекрытия экранами освобождаемых датчиков уменьшается до нуля, в результате чего электросигнал от освобожденного датчика меняется на противоположный и включается привод (поз. не показана) модуля 3 на перемещение "вдогонку" за модулем 1 по той координатной оси, с которой пришел сигнал от датчика. Перемещение модуля 3 продолжается до полного перекрытия соответствующим экраном освобожденного перед этим датчика, т.е. до восстановления первоначального электросигнала от этого датчика, вызывающего отключение соответствующего привода модуля 3. Таким образом, импульсное перемещение модуля 3 вслед за модулем 1 по какой-либо координатной оси X или Υ длится от момента предельно допустимого рассогласования L модулей 1 и 3 по этой оси до момента восстановления исходного взаимного положения модулей по этой же координатной оси. В аварийной ситуации, когда по какой-либо причине не произошло восстановительное перемещение модуля 3 и рассогласование L взаимного положения модулей 1 и 3 продолжает нарастать, поднимающийся вверх один из экранов 25, 26, 27 или 28 перекрывает соответствующий ему аварийный датчик 21, 22, 23 или 24, в котором изменение электросигнала вызывает аварийное прекращение работы резака 2 и перемещение модуля 1. Во время смещения резака 2 от исходного положения относительно модуля 3 длина отрезка энергопроводов 4 между концом 29 трубы 5 и местом 30 крепления на резаке 2 остается неизменной и равной зазору Н. Однако расстояние между центром 10 кардана 8 и местом 30 резака 2 увеличивается и происходит это за счет осевого смещения трубы 5 относительно кардана 8 при упругой деформации пружины 7. Пружина 7 может также компенсировать изменения расстояния между центром 10 и местом 30 при отслеживании (сохранении постоянным или изменении по управляющему сигналу) вертикального зазора между резаком 2 и поверхностью раскраиваемого материала (поз. не показана). Длина отрезка энергопроводов 4 между центром 10 кардана 8 и местом 30 крепления на резаке 2 может меняться за счет деформации пружины 7также при изменении угла наклона резака 2 относительно вертикали в чем возникает необходимость, например, при выполнении скошенных кромок реза на раскраиваемом материале и т.п. Использование предлагаемого устройства позволит автоматизировать процесс резания немеханическими резаками при использовании двух, не связанных механически и выполняющих самостоятельные функции, подвижных модулей, что обеспечит высокую точность при высокой производительности резания.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for non-mechanical cutting
Автори англійськоюTsaturov Hierbiert Robiertovich, Turkot Viktor Volodymyrovych, Bolbot Oleksandr Kindratovych, Smola Volodymyr Mykolaiovych, Bilaihorod Leonid Mykhailovych, Starodubtseva Tamara Kostiantynivna
Назва патенту російськоюУстройство для немеханической резки
Автори російськоюЦатуров Герберт Робертович, Туркот Виктор Владимирович, Больбот Александр Кондратьевич, Смола Владимир Николаевич, Билайгород Леонид Михайлович, Стародубцева Тамара Константиновна
МПК / Мітки
МПК: B26F 3/00, B23D 31/00
Мітки: пристрій, різання, немеханічного
Код посилання
<a href="https://ua.patents.su/5-18784-pristrijj-dlya-nemekhanichnogo-rizannya.html" target="_blank" rel="follow" title="База патентів України">Пристрій для немеханічного різання</a>
Пристрій для різання цукеркових пластів
Номер патенту: 3265
Опубліковано: 26.12.1994
Автори: Сезонов Володимир Степанович, Здравка Степан Михайлович, Вайсман Євген Сандович, Середа Володимир Климентійович
МПК: A23G 3/12
Мітки: пристрій, цукеркових, пластів, різання
Формула / Реферат:
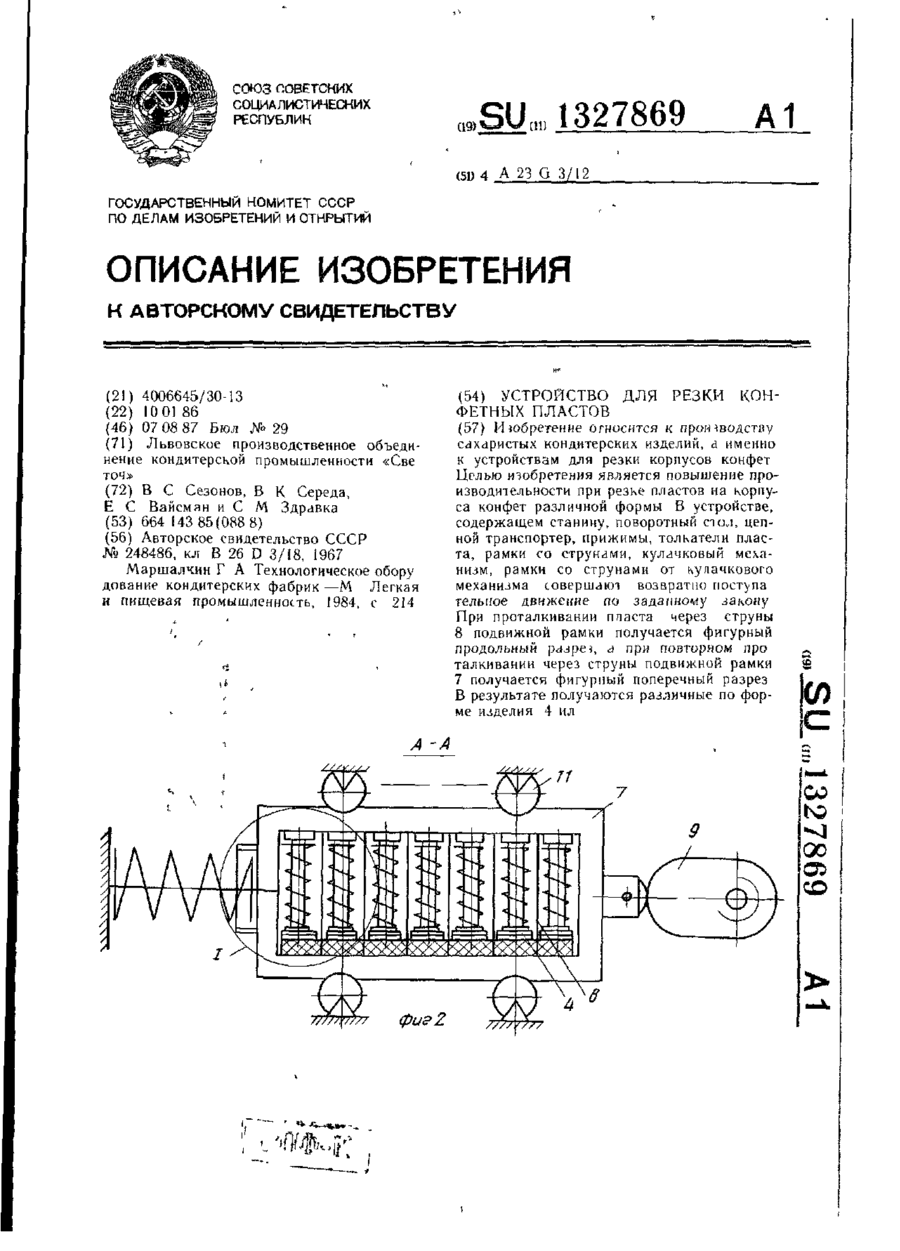
Устройство для резки конфетных пластов, содержащее станину, поворотный стол, цепной транспортер, прижимы и толкатели пласта, и рамки со струнами, отличающееся тем, что, с целью повышения производительности при резке пластов на корпуса конфет различной формы, оно снабжено кулачковыми механизмами, установленными с возможностью взаимодействия с каждой из рамок, последние смонтированы на опорных родиках с возможностью перемещения в...
Пристрій для різання
Номер патенту: 2514
Опубліковано: 26.12.1994
Автор: Чеботарьов Григорій Аврамович
МПК: B23D 29/00
Формула / Реферат:
Устройство для резки тросов, содержащее два поворотных вокруг общей оси рычага, несущие пластинчатые ножи с режущими кромками, образованными вырезами с образующей по дуге окружности, отличающееся тем, что оно снабжено подпружиненными кулачками, установленными на одном из рычагов, и двумя парами зажимных губок, выполненных в виде полуколец, расположенных с двух сторон относительно пластинчатых ножей под кулачками, при этом одна из губок в...
Пристрій для різання полімерних матеріалів
Номер патенту: 11619
Опубліковано: 25.12.1996
Автори: Гладков Юрій Олексійович, Рубан Віктор Олександрович, Звєрєв Михайло Федорович, Абрамсон Володимир Ілліч, Пісковатський Віктор Сергійович
МПК: B29B 11/00
Мітки: пристрій, полімерних, різання, матеріалів
Формула / Реферат:
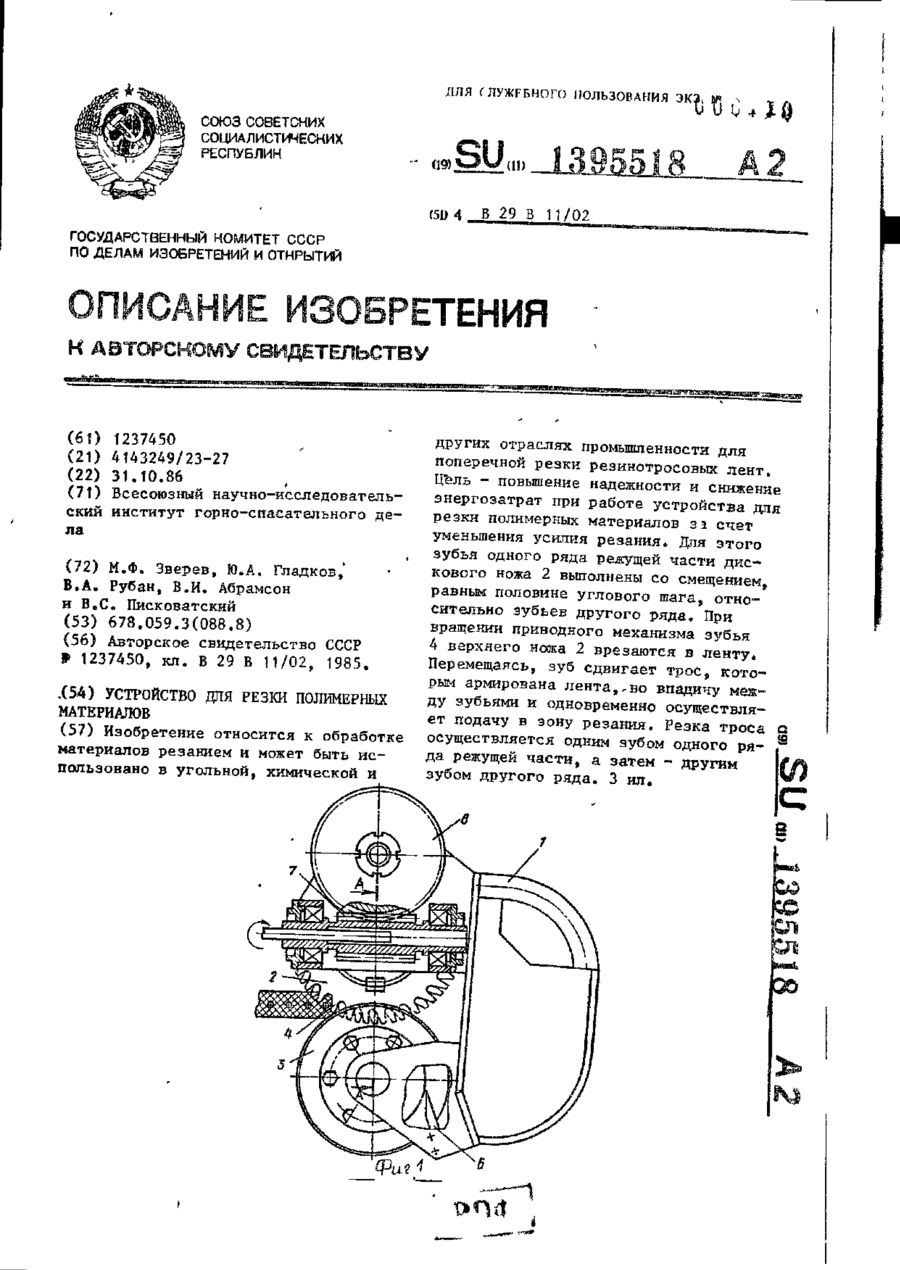
Устройство для резки полимерных материалов по авт. св. № 1237450, отличающееся тем, что, с целью повышения надежности и снижения энергозатрат за счет уменьшения усилия резания, зубья одного ряда режущей части дискового ножа расположены со смещением относительно зубьев другого ряда на величину, равную половине их углового шага.
Пристрій для різання спецпрофіля шахтного кріплення
Номер патенту: 20119
Опубліковано: 25.12.1997
Автори: Могілевський Леонід Григорович, Косарєв Василь Васильович, Косарєв Іван Васильович, Андрєєв Георгій Володимирович, Непомнящий Олександр Лазаревич
МПК: B23D 23/00
Мітки: спецпрофіля, шахтного, кріплення, пристрій, різання
Формула / Реферат:
1. Устройство для резки спецпрофиля шахтной крепи, включающее гидроцилиндр, корпус, плиту, элементы связи плиты с корпусом, подвижный нож, снабженный наклонными боковыми режущими кромками, расположенными симметрично относительно продольной оси ножа, и неподвижный нож, жестко связанный с плитой, отличающееся тем, что подвижный нож выполнен с углом наклона каждой из его режущих кромок как минимум в 1,8 раза больше угла наклона каждой из боковых...
Пристрій для різання овочів
Номер патенту: 4654
Опубліковано: 28.12.1994
Автори: Авраменко Олександр Васильович, Кострецов Володимир Никифорович, Шкляр Яков Федорович, Воловик Володимир Давидович
МПК: B26D 1/00
Мітки: пристрій, різання, овочів
Формула / Реферат:
Устройство для резки овощей, преимущественно капусты, содержащее раму, кожух, установленную на раме загрузочную воронку, смонтированную на приводном вертикальном валу с закрепленным на нем ножевым диском и выгрузное приспособление, отличающееся тем, что выгрузочное приспособление выполнено в виде диска с радиальными лопатками, закрепленным на валу под ножевым диском, устройство снабжено вертикально установленным эластичным экраном,...
Попередній патент: Пристрій для з’єднання високовольтних кабелів
Наступний патент: Газорозподільча решітка для апаратів з псевдорозрідженим шаром
Випадковий патент: Термоелектричний сплав