Аеростатична осьова опора
Номер патенту: 20646
Опубліковано: 05.08.1997
Автори: Шепелев Анатолій Олександрович, Зіненко Анатолій Миколайович
Формула / Реферат
1. Аэростатическая осевая опора, содержащая корпус, в котором размещены подвижный узел, выполненный в виде вала и пяты и, установленные с зазорами относительно пяты по обеим сторонам основания, жиклеры подачи газа в зазоры, а также узел стабилизации зазора, включающий датчик линейных перемещений и электрически связанные с ними компенсаторы перемещений с регуляторами давления, состоящими из пьезоэлектрических двигателей и регулировочных игл, установленными в камерах наддува и жиклерами подачи газа, соосными регулировочным иглам, отличающаяся тем, что вал и пята подвижного узла выполнены раздельно, при этом пята установлена на валу с возможностью изменения угла наклона плоскости пяты к оси вращения вала, а компенсаторы перемещений установлены, по крайней мере на одном из оснований, в котором выполнены жиклеры подачи газа.
2. Аэростатическая осевая опора по п. 1, отличающаяся тем, что пьезоэлектрические двигатели снабжены толкателями, взаимодействующими с закрепленным, по крайней мере на одном из оснований, введенным в устройство, коромыслом, регулировочные иглы закреплены на коромыслах, а точка взаимодействия толкателя с коромыслом находится между регулировочной иглой и осью поворота коромысла.
Текст
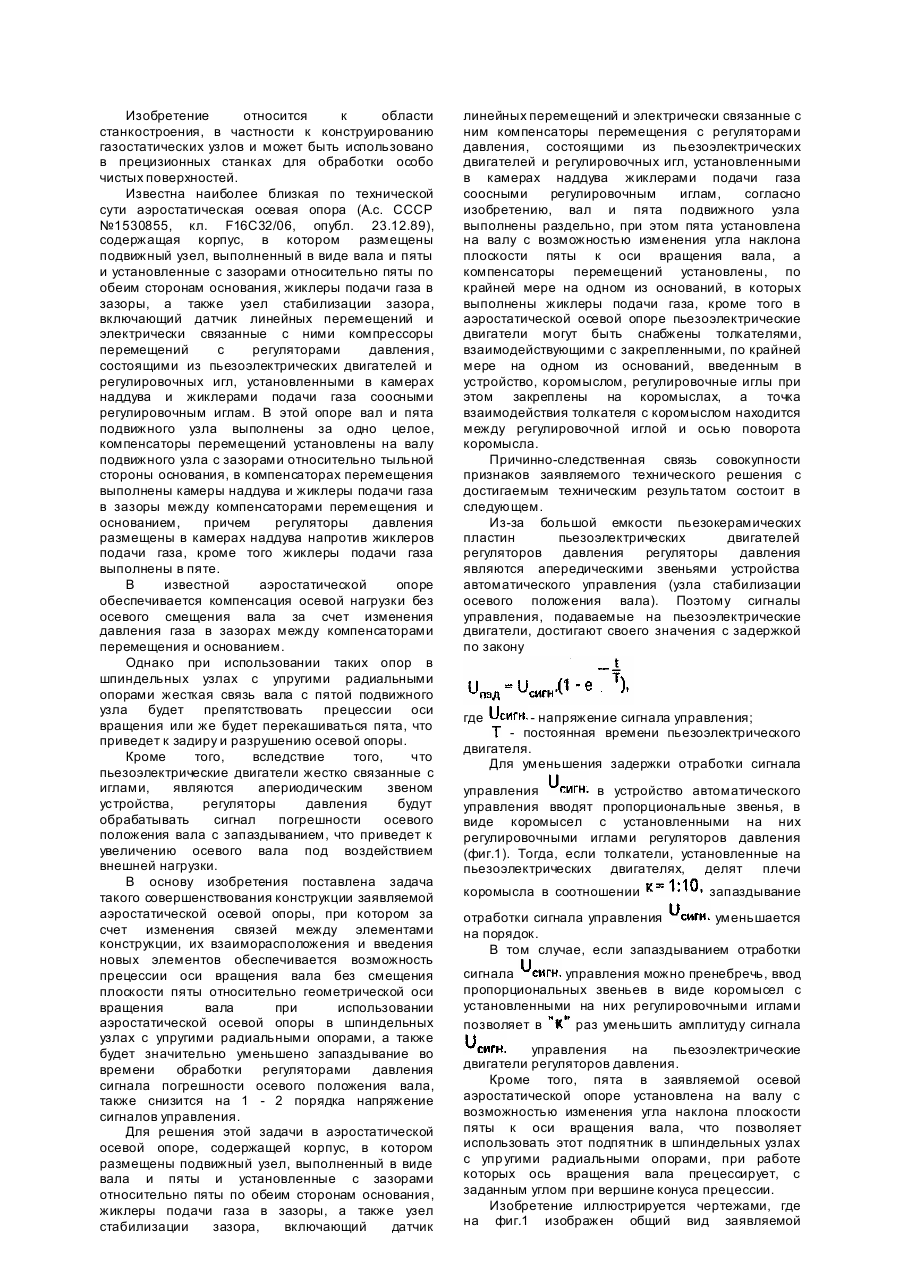
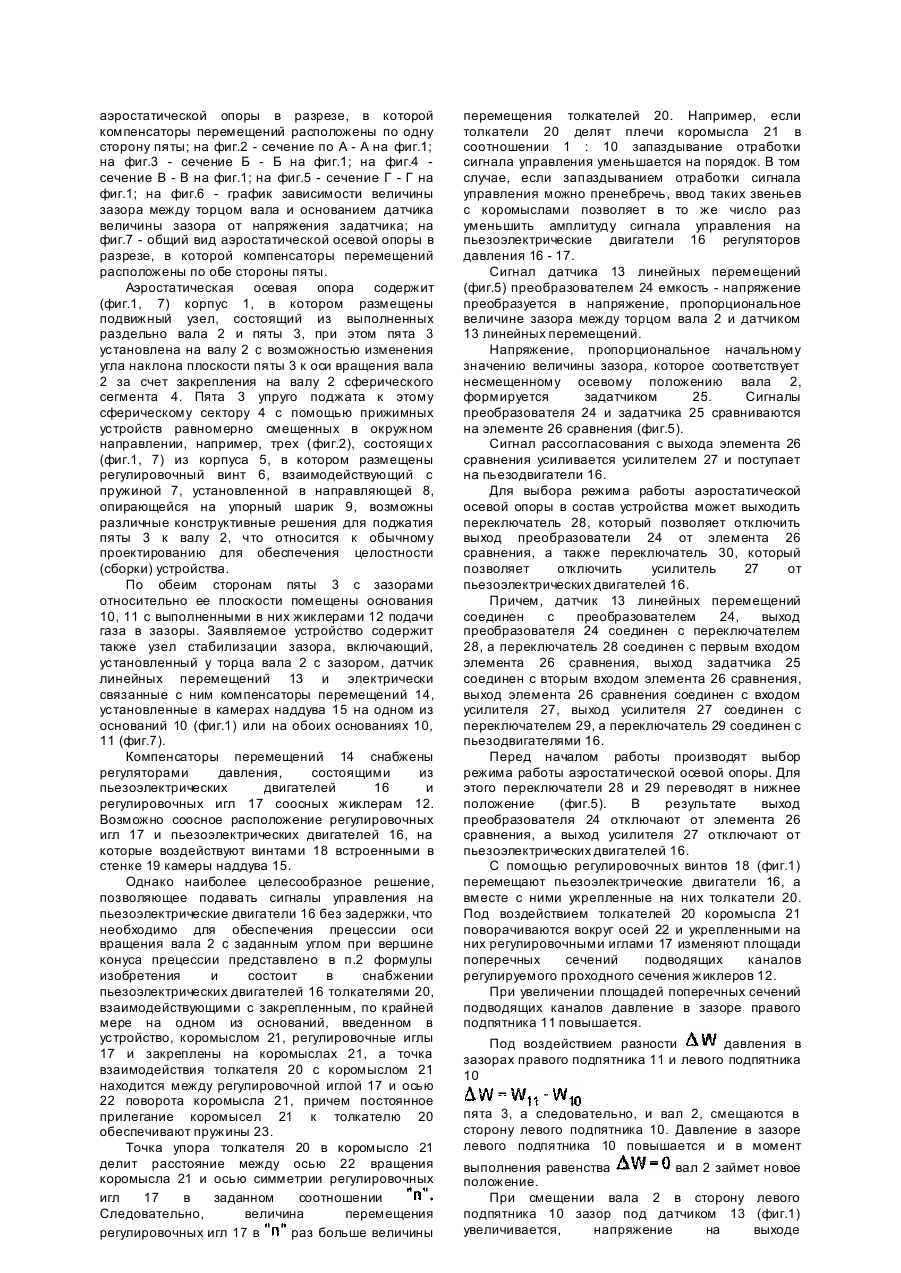
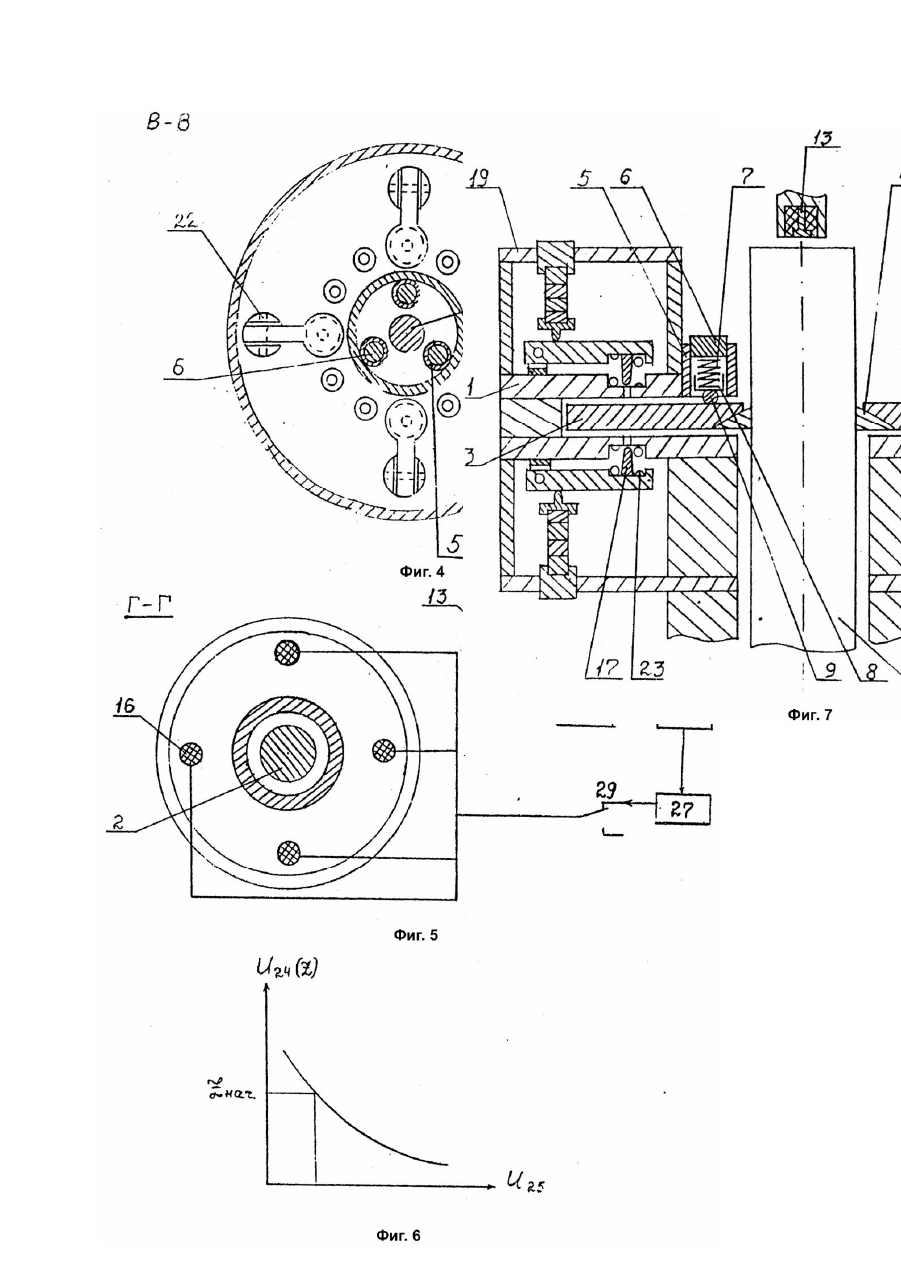
Изобретение относится к области станкостроения, в частности к конструированию газостатических узлов и может быть использовано в прецизионных станках для обработки особо чистых поверхностей. Известна наиболее близкая по технической сути аэростатическая осевая опора (А.с. СССР №1530855, кл. F16C32/06, опубл. 23.12.89), содержащая корпус, в котором размещены подвижный узел, выполненный в виде вала и пяты и установленные с зазорами относительно пяты по обеим сторонам основания, жиклеры подачи газа в зазоры, а также узел стабилизации зазора, включающий датчик линейных перемещений и электрически связанные с ними компрессоры перемещений с регуляторами давления, состоящими из пьезоэлектрических двигателей и регулировочных игл, установленными в камерах наддува и жиклерами подачи газа соосными регулировочным иглам. В этой опоре вал и пята подвижного узла выполнены за одно целое, компенсаторы перемещений установлены на валу подвижного узла с зазорами относительно тыльной стороны основания, в компенсаторах перемещения выполнены камеры наддува и жиклеры подачи газа в зазоры между компенсаторами перемещения и основанием, причем регуляторы давления размещены в камерах наддува напротив жиклеров подачи газа, кроме того жиклеры подачи газа выполнены в пяте. В известной аэростатической опоре обеспечивается компенсация осевой нагрузки без осевого смещения вала за счет изменения давления газа в зазорах между компенсаторами перемещения и основанием. Однако при использовании таких опор в шпиндельных узлах с упругими радиальными опорами жесткая связь вала с пятой подвижного узла будет препятствовать прецессии оси вращения или же будет перекашиваться пята, что приведет к задиру и разрушению осевой опоры. Кроме того, вследствие того, что пьезоэлектрические двигатели жестко связанные с иглами, являются апериодическим звеном устройства, регуляторы давления будут обрабатывать сигнал погрешности осевого положения вала с запаздыванием, что приведет к увеличению осевого вала под воздействием внешней нагрузки. В основу изобретения поставлена задача такого совершенствования конструкции заявляемой аэростатической осевой опоры, при котором за счет изменения связей между элементами конструкции, их взаиморасположения и введения новых элементов обеспечивается возможность прецессии оси вращения вала без смещения плоскости пяты относительно геометрической оси вращения вала при использовании аэростатической осевой опоры в шпиндельных узлах с упругими радиальными опорами, а также будет значительно уменьшено запаздывание во времени обработки регуляторами давления сигнала погрешности осевого положения вала, также снизится на 1 - 2 порядка напряжение сигналов управления. Для решения этой задачи в аэростатической осевой опоре, содержащей корпус, в котором размещены подвижный узел, выполненный в виде вала и пяты и установленные с зазорами относительно пяты по обеим сторонам основания, жиклеры подачи газа в зазоры, а также узел стабилизации зазора, включающий датчик линейных перемещений и электрически связанные с ним компенсаторы перемещения с регуляторами давления, состоящими из пьезоэлектрических двигателей и регулировочных игл, установленными в камерах наддува жиклерами подачи газа соосными регулировочным иглам, согласно изобретению, вал и пята подвижного узла выполнены раздельно, при этом пята установлена на валу с возможностью изменения угла наклона плоскости пяты к оси вращения вала, а компенсаторы перемещений установлены, по крайней мере на одном из оснований, в которых выполнены жиклеры подачи газа, кроме того в аэростатической осевой опоре пьезоэлектрические двигатели могут быть снабжены толкателями, взаимодействующими с закрепленными, по крайней мере на одном из оснований, введенным в устройство, коромыслом, регулировочные иглы при этом закреплены на коромыслах, а точка взаимодействия толкателя с коромыслом находится между регулировочной иглой и осью поворота коромысла. Причинно-следственная связь совокупности признаков заявляемого технического решения с достигаемым техническим результатом состоит в следующем. Из-за большой емкости пьезокерамических пластин пьезоэлектрических двигателей регуляторов давления регуляторы давления являются апередическими звеньями устройства автоматического управления (узла стабилизации осевого положения вала). Поэтому сигналы управления, подаваемые на пьезоэлектрические двигатели, достигают своего значения с задержкой по закону где - напряжение сигнала управления; - постоянная времени пьезоэлектрического двигателя. Для уменьшения задержки отработки сигнала управления в устройство автоматического управления вводят пропорциональные звенья, в виде коромысел с установленными на них регулировочными иглами регуляторов давления (фиг.1). Тогда, если толкатели, установленные на пьезоэлектрических двигателях, делят плечи коромысла в соотношении запаздывание отработки сигнала управления уменьшается на порядок. В том случае, если запаздыванием отработки сигнала управления можно пренебречь, ввод пропорциональных звеньев в виде коромысел с установленными на них регулировочными иглами позволяет в раз уменьшить амплитуду сигнала управления на пьезоэлектрические двигатели регуляторов давления. Кроме того, пята в заявляемой осевой аэростатической опоре установлена на валу с возможностью изменения угла наклона плоскости пяты к оси вращения вала, что позволяет использовать этот подпятник в шпиндельных узлах с упр угими радиальными опорами, при работе которых ось вращения вала прецессирует, с заданным углом при вершине конуса прецессии. Изобретение иллюстрируется чертежами, где на фиг.1 изображен общий вид заявляемой аэростатической опоры в разрезе, в которой компенсаторы перемещений расположены по одну сторону пяты; на фиг.2 - сечение по А - А на фиг.1; на фиг.3 - сечение Б - Б на фиг.1; на фиг.4 сечение В - В на фиг.1; на фиг.5 - сечение Г - Г на фиг.1; на фиг.6 - график зависимости величины зазора между торцом вала и основанием датчика величины зазора от напряжения задатчика; на фиг.7 - общий вид аэростатической осевой опоры в разрезе, в которой компенсаторы перемещений расположены по обе стороны пяты. Аэростатическая осевая опора содержит (фиг.1, 7) корпус 1, в котором размещены подвижный узел, состоящий из выполненных раздельно вала 2 и пяты 3, при этом пята 3 установлена на валу 2 с возможностью изменения угла наклона плоскости пяты 3 к оси вращения вала 2 за счет закрепления на валу 2 сферического сегмента 4. Пята 3 упруго поджата к этому сферическому сектору 4 с помощью прижимных устройств равномерно смещенных в окружном направлении, например, трех (фиг.2), состоящи х (фиг.1, 7) из корпуса 5, в котором размещены регулировочный винт 6, взаимодействующий с пружиной 7, установленной в направляющей 8, опирающейся на упорный шарик 9, возможны различные конструктивные решения для поджатия пяты 3 к валу 2, что относится к обычному проектированию для обеспечения целостности (сборки) устройства. По обеим сторонам пяты 3 с зазорами относительно ее плоскости помещены основания 10, 11 с выполненными в них жиклерами 12 подачи газа в зазоры. Заявляемое устройство содержит также узел стабилизации зазора, включающий, установленный у торца вала 2 с зазором, датчик линейных перемещений 13 и электрически связанные с ним компенсаторы перемещений 14, установленные в камерах наддува 15 на одном из оснований 10 (фиг.1) или на обоих основаниях 10, 11 (фиг.7). Компенсаторы перемещений 14 снабжены регуляторами давления, состоящими из пьезоэлектрических двигателей 16 и регулировочных игл 17 соосных жиклерам 12. Возможно соосное расположение регулировочных игл 17 и пьезоэлектрических двигателей 16, на которые воздействуют винтами 18 встроенными в стенке 19 камеры наддува 15. Однако наиболее целесообразное решение, позволяющее подавать сигналы управления на пьезоэлектрические двигатели 16 без задержки, что необходимо для обеспечения прецессии оси вращения вала 2 с заданным углом при вершине конуса прецессии представлено в п.2 формулы изобретения и состоит в снабжении пьезоэлектрических двигателей 16 толкателями 20, взаимодействующими с закрепленным, по крайней мере на одном из оснований, введенном в устройство, коромыслом 21, регулировочные иглы 17 и закреплены на коромыслах 21, а точка взаимодействия толкателя 20 с коромыслом 21 находится между регулировочной иглой 17 и осью 22 поворота коромысла 21, причем постоянное прилегание коромысел 21 к толкателю 20 обеспечивают пружины 23. Точка упора толкателя 20 в коромысло 21 делит расстояние между осью 22 вращения коромысла 21 и осью симметрии регулировочных игл 17 в заданном соотношении Следовательно, величина перемещения регулировочных игл 17 в раз больше величины перемещения толкателей 20. Например, если толкатели 20 делят плечи коромысла 21 в соотношении 1 : 10 запаздывание отработки сигнала управления уменьшается на порядок. В том случае, если запаздыванием отработки сигнала управления можно пренебречь, ввод таких звеньев с коромыслами позволяет в то же число раз уменьшить амплитуду сигнала управления на пьезоэлектрические двигатели 16 регуляторов давления 16 - 17. Сигнал датчика 13 линейных перемещений (фиг.5) преобразователем 24 емкость - напряжение преобразуется в напряжение, пропорциональное величине зазора между торцом вала 2 и датчиком 13 линейных перемещений. Напряжение, пропорциональное начальному значению величины зазора, которое соответствует несмещенному осевому положению вала 2, формируется задатчиком 25. Сигналы преобразователя 24 и задатчика 25 сравниваются на элементе 26 сравнения (фиг.5). Сигнал рассогласования с выхода элемента 26 сравнения усиливается усилителем 27 и поступает на пьезодвигатели 16. Для выбора режима работы аэростатической осевой опоры в состав устройства может выходить переключатель 28, который позволяет отключить выход преобразователи 24 от элемента 26 сравнения, а также переключатель 30, который позволяет отключить усилитель 27 от пьезоэлектрических двигателей 16. Причем, датчик 13 линейных перемещений соединен с преобразователем 24, выход преобразователя 24 соединен с переключателем 28, а переключатель 28 соединен с первым входом элемента 26 сравнения, выход задатчика 25 соединен с вторым входом элемента 26 сравнения, выход элемента 26 сравнения соединен с входом усилителя 27, выход усилителя 27 соединен с переключателем 29, а переключатель 29 соединен с пьезодвигателями 16. Перед началом работы производят выбор режима работы аэростатической осевой опоры. Для этого переключатели 28 и 29 переводят в нижнее положение (фиг.5). В результате выход преобразователя 24 отключают от элемента 26 сравнения, а выход усилителя 27 отключают от пьезоэлектрических двигателей 16. С помощью регулировочных винтов 18 (фиг.1) перемещают пьезоэлектрические двигатели 16, а вместе с ними укрепленные на них толкатели 20. Под воздействием толкателей 20 коромысла 21 поворачиваются вокруг осей 22 и укрепленными на них регулировочными иглами 17 изменяют площади поперечных сечений подводящих каналов регулируемого проходного сечения жиклеров 12. При увеличении площадей поперечных сечений подводящих каналов давление в зазоре правого подпятника 11 повышается. Под воздействием разности давления в зазорах правого подпятника 11 и левого подпятника 10 пята 3, а следовательно, и вал 2, смещаются в сторону левого подпятника 10. Давление в зазоре левого подпятника 10 повышается и в момент выполнения равенства вал 2 займет новое положение. При смещении вала 2 в сторону левого подпятника 10 зазор под датчиком 13 (фиг.1) увеличивается, напряжение на выходе преобразователей 24 увеличивается пропорционально величине этого зазора и измеряется вольтметром. Последовательно изменяя положение пьезоэлектрических двигателей 16 добиваются максимального смещения вала 2 в сторону левого подпятника 10, что достигается при полностью открытых подводящих каналах регулируемого проходного сечения жиклеров 12. Контроль за величиной смещения вала 2 осуществляется по измерениям выходного напряжения преобразователя 24. В результате выполнения описанных выше действий пьезоэлектрические двигатели 16 относительно коромысел 21 займут такие положения, при которых (при нулевых сигналах управления на пьезоэлектрические двигатели 16) подводящие каналы жиклеров 12 становятся полностью открытыми. Выход усилителя 27 переключателем 29 подключают к пьезостолбам 16, Повышают с дискретой напряжение на выходе задатчика 25. На каждой дискрете выходного напряжения задатчика 25 измеряют (с помощью вольтметра) выходное напряжение на выходе преобразователя 24, пропорциональное и однозначно соответствующее величине зазора под датчиком 13, и строят зависимость величины этого зазора (величины смещения вала 2) от напряжения задатчика 24 (фиг.6). По полученной зависимости выбирают начальное значение между датчиком 13 и торцом вала 2 на линейном участке этой зависимости с большой крутизной. Тогда зазору будет соответство вать такое положение регулировочных игл 17, отклонение от которого в сторону увеличения или уменьшения площадей поперечных сечений подводящих каналов регулируемого проходного сечения жиклеров 12 обеспечивает компенсацию максимальной осевой нагрузки по сравнению с другими начальными значениями этого зазора. Переключателем 28 подключают преобразователь 24 к элементу 26 сравнения. Изменяют напряжение на выходе задатчика 24 и устанавливают величину зазора под датчиком 13, равном Установку начальной величины зазора выполняют по величине выходного напряжения преобразователя 24. Аэростатическая осевая опора готова к работе. Аэростатическая осевая опора работает следующим образом. Пусть под воздействием, например, осевой составляющей силы шлифования пята 3 начинает смещаться в сторону правого подпятника 11. В результате зазор между торцом вала 2 и датчиком 13 (фиг.1) начинает уменьшаться. Пропорционально уменьшению этого зазора уменьшается напряжение на выходе преобразователя 24, а сигнал рассогласования на выходе элемента 26 сравнения увеличивается и поступает на вход усилителя 27. Усиленный проинвентированный сигнал с выхода усилителя 27 поступает на пьезоэлектрические двигатели 16. Пьезоэлектрические двигатели 16 укорачиваются. В результате коромысла 21 под воздействием пружин 23 поворачиваются вокруг осей 22 и приоткрывают подводящие каналы регулируемого проходного сечения жиклеров 12. Давление в зазоре правого подпятника 11 повышается и предотвращает смещение вала 2. Если под воздействием осевой нагрузки пята 3 начинает смещаться в сторону левого подпятника 10 зазор под датчиком 13 начинает увеличиваться. В результате увеличивается напряжение на выходе преобразователя 24. Сигнал рассогласования на выходе элемента 26 сравнения изменяет полярность и поступает на вход усилителя 27, а с его выхода усиленный проинвентированный сигнал поступает на пьезоэлектрические двигатели 16. Пьезоэлектрические двигатели 16 удлиняются и толкателями 20 поворачивают коромысла 21 вокруг осей 22. Регулировочные иглы 17 призакрывают подводящие каналы регулируемого проходного сечения жиклеров 12. Давление в зазоре правого подпятника 11 уменьшается. Под воздействием разности давлений в левом подпятнике 10 и правом подпятнике 11 вал 2 займет несмещенное положение. Величина погрешности положения вала 2 под воздействием осевой нагрузки равна величине отклонения величины зазора под датчиком 13, от его начального значения В данном случае, как и во всяком автоматическом устройстве управления (АУУ), реализующем принцип управления по отклонению, величина осевого смещения вала определяется следующими факторами: 1. Точностью измерения управляемой величины измерительным элементом. В данном случае управляемый величиной является значение (фиг.6) величины зазора, а измерительным элементом являются датчик 13 и преобразователь 24. В настоящее время (Гриневич Б.Ф. и др. Измерительные компенсационномостовые устройства с емкостными датчиками. - К.: Наук. думка, 1987) точность измерителей микроперемещений составляет 10-3 10-4 изменяемой величины. Следовательно, при величине погрешность измерения составляет 3 × 10-2мкм. Тогда при величине зазора и выходном напряжении преобразователя 24 равном 5В погрешности измерения 3 × 10-2мкм соответствует 0,5 × 10-2В шума на выходе преобразователя 24. 2. Стабильностью напряжения на выходе задатчика 24. В качестве задатчика 24 может быть использован источник постоянного напряжения, схема которого приведена в журнале "Радио", 1991, №3, с.50. Нестабильность этого источника не превышает 10 - 5 величины выходного напряжения. Например, при нестабильность (шум) источника постоянного напряжения не превышает 0,5 × 10-4В. 3. Шумом на выходе устройства 26 сравнения. Шум на выходе устройства 26 сравнения в диапазоне осевых нагрузок шлифовального станка может не превышать 10мкВ. 4. Шумом оконечного усилителя 27. Усилитель 27 является пропорциональным звеном АУУ, передаточная функция которого имеет вид Приведенная ко входу погрешность (шум) прецезионных усилителей не превышает 10мкВ и ею можно пренебречь. Тогда шум преобразователя 24, задатчика 25 и устройства 26 сравнения, приведенного ко входу усилителя 27 для принятых , выходных напряжений преобразователя 24 и задатчика 25, и принятых значений их собственных шумов, не превышает 0,15 × 10-1В. Если 250В напряжения на выходе усилителя 27 соответствует 50мкм перемещения регулировочной иглы 17, а коэффициент усиления усилителя 27 погрешность положения регулировочной иглы 17 составляет Тогда, если для компенсации осевой нагрузки перемещение регулировочной иглы 17 составляет 50мкм, погрешности ее положения соответствует 0,3кГ нескомпенсированной осевой нагрузки. При жесткости осевой аэростатической опоры 5кГ/мкм это составляет погрешности положения вала аэростатической осевой опоры. Для расширения диапазона нагрузок воспринимаемых осевой аэростаической опорой без смещения оси вращения вала 2 в левом подпятнике 10 (фиг.7) также выполняют жиклеры 12 с подводящими каналами регулируемого проходного сечения, каждый из которых оснащен быстродействующим регулятором давления. При этом пьезоэлектрические двигатели 16 быстродействующих регуляторовдавления правого подпятника и пьезоэлектрические двигатели 16 левого подпятника 10 к выходу усилителя 27 подключаются в противофазе.
ДивитисяДодаткова інформація
Назва патенту англійськоюAerostatic axial support
Автори англійськоюShepelev Anatolii Oleksandrovych, Zinenko Volodymyr Mykolaiovych
Назва патенту російськоюАэростатическая осевая опора
Автори російськоюШепелев Анатолий Александрович, Зиненко Владимир Николаевич
МПК / Мітки
МПК: F16C 32/06
Мітки: аеростатична, опора, осьова
Код посилання
<a href="https://ua.patents.su/5-20646-aerostatichna-osova-opora.html" target="_blank" rel="follow" title="База патентів України">Аеростатична осьова опора</a>
Опора котла залізничної цистерни
Номер патенту: 8160
Опубліковано: 26.12.1995
Автори: Макаров Юрій Васильович, Попченков Микола Михайлович, Майоренко Михайло Никифорович, Капуста Іван Миколайович, Тусіков Євген Кондратович, Бекасов Юрій Олександрович, Касянчук Григорій Михайлович, Бакланов Михайло Петрович
МПК: B61F 1/00, B65D 88/00
Мітки: котла, цистерни, опора, залізничної
Формула / Реферат:
1. Опора котла железнодорожной цистерны, включающая ложементы с двумя пятами, каждая из которых жестко закреплена на шкворневых балках рамы симметрично продольной оси хребтовой балки, и подпорки, отличающаяся тем, что, с целью снижения трудоемкости монтажа и повышения эксплуатационной надежности, подпорки свободно установлены под котлом, при этом одна из поверхностей каждой контактной пары пята - подпора выполнена сферической. 2....
Суміщена шпиндельна опора
Номер патенту: 15383
Опубліковано: 30.06.1997
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: F16C 32/06, F16C 29/04, B24B 41/00
Мітки: суміщена, шпиндельна, опора
Формула / Реферат:
1. Совмещенная шпиндельная опора, содержащая корпус, в котором размещен вал, установленный на опоре качения и радиальной аэростатической опоре, выполненной параллельно с опорой качения, отличающаяся тем, что опора снабжена дополнительной опорой качения, установленной параллельно имеющейся, а по обеим сторонам радиальной аэростатической опоры, расположены не менее двух однорядных радиальных аэростатических опор с принудительно регулируемой...
Дводзеркальна симетрично-осьова антена

Номер патенту: 286
Опубліковано: 30.04.1993
Автори: Андрусенко Володимир Петрович, Ерухимович Юрій Абрамович, Скрипняк Олександр Олександрович, Малечіц Євген Андрійович
МПК: H01Q 19/10
Мітки: антена, симетрично-осьова, дводзеркальна
Формула / Реферат:
Двухзеркальная осесимметричная антенна, содержащая основное параболическое зеркало, вспомогательное зеркало в виде тела вращения с образующей кривой второго порядка, первый фокус которой совмещен с фокусом параболической образующей основного параболического зеркала, а второй фокус - с фазовым центром рупорного облучателя, отличающаяся тем, что образующая тела вращения, формирующая поверхность вспомогательного зеркала, является огибающей...
Пружна опора
Номер патенту: 17151
Опубліковано: 18.03.1997
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович, Цілина Владислав Володимирович
МПК: F16C 27/00
Формула / Реферат:
1. Упругая опора, содержащая втулку для установки вала вращающегося элемента станка со сквозными пазами, равномерно расположенными по окружности, отличающаяся тем, что пазы выполнены радиальными, в них размещены упруго поджатые в радиальном направлении вкладыши, причем паз с упруго поджатым в нем вкладышем образуют упругий элемент упругой опоры, при этом по крайней мере одна пара упомянутых упругих элементов, размещенных по полуосям и...
Магнітна опора для стабілізації положення вала
Номер патенту: 2264
Опубліковано: 26.12.1994
Автори: Альбрехт Веллер, Йохан Крістіан Фремерей
МПК: F16C 32/04
Мітки: опора, вала, магнітна, стабілізації, положення
Формула / Реферат:
1. Магнитная опора для стабилизации положения вала, содержащая вал и корпус, в котором расположены электрические катушки, а также соединенную с ними систему датчиков положения вала, регулятор и постоянные магниты, отличающаяся тем, что, с целью улучшения эксплуатационных характеристик и упрощения конструкции, она снабжена по меньшей мере двумя смонтированными на валу вдоль его оси с зазором по отношению друг к другу упорными дисками, по...
Попередній патент: Спосіб рефлексотерапевтичного лікування болю у суглобах при ревматоідному артриті
Наступний патент: Клапанний вузол поршневого аміачного компресора
Випадковий патент: Атракціон "superninjahouse"