Релейний управляючий пристрій
Формула / Реферат
Релейний управляючий пристрій, що містить блок завдання зміщення і релейний елемент, вихід якого з'єднаний з об'єктом управління, який відрізняється тим, що введені послідовно з'єднані блок вимірювання початкових умов, аналого-цифровий перетворювач, вихід якого з'єднаний з управляючим входом блока завдання зміщення, причому другий вхід блока завдання зміщення з'єднаний з входом пристрою і з входом блока вимірювання початкових умов.
Текст
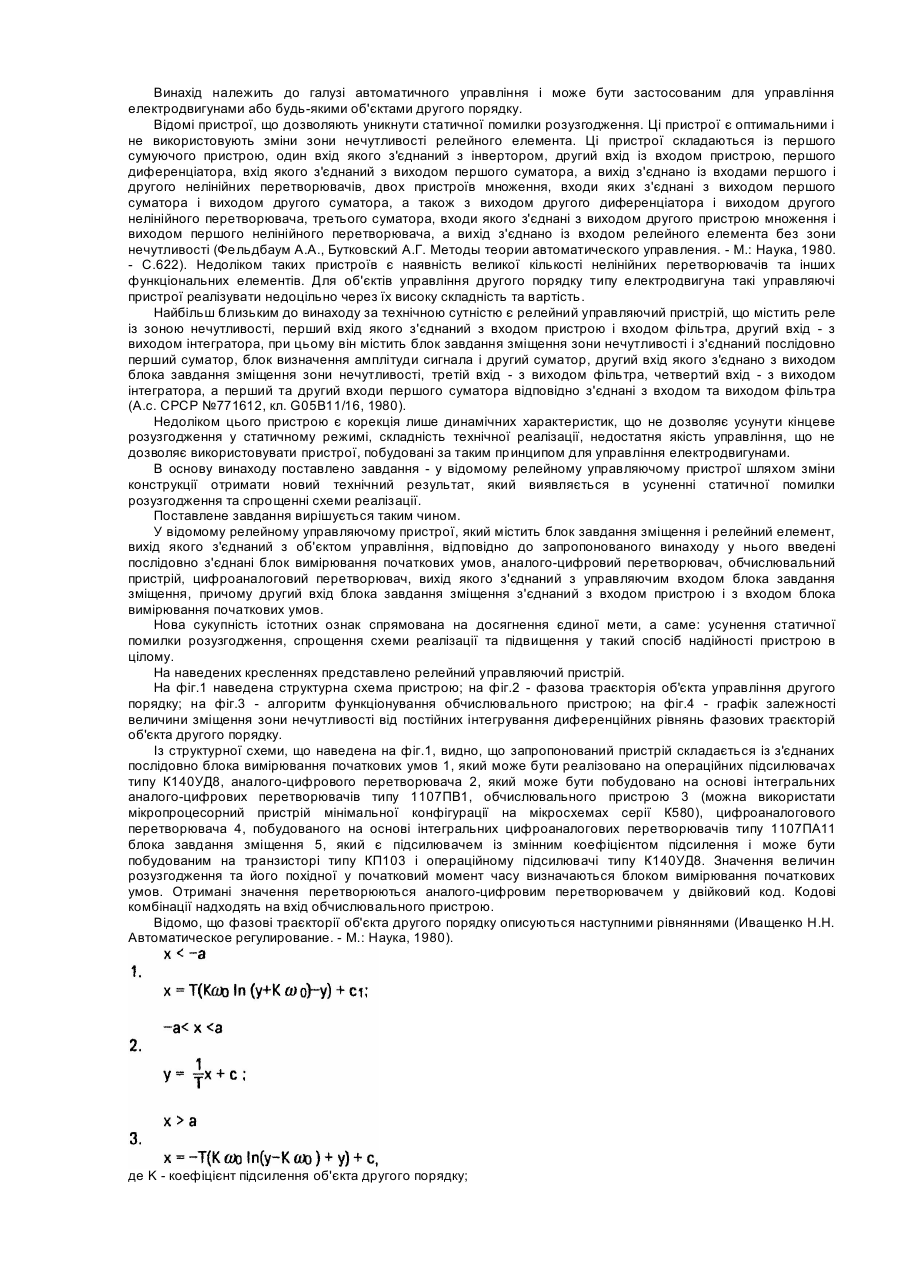
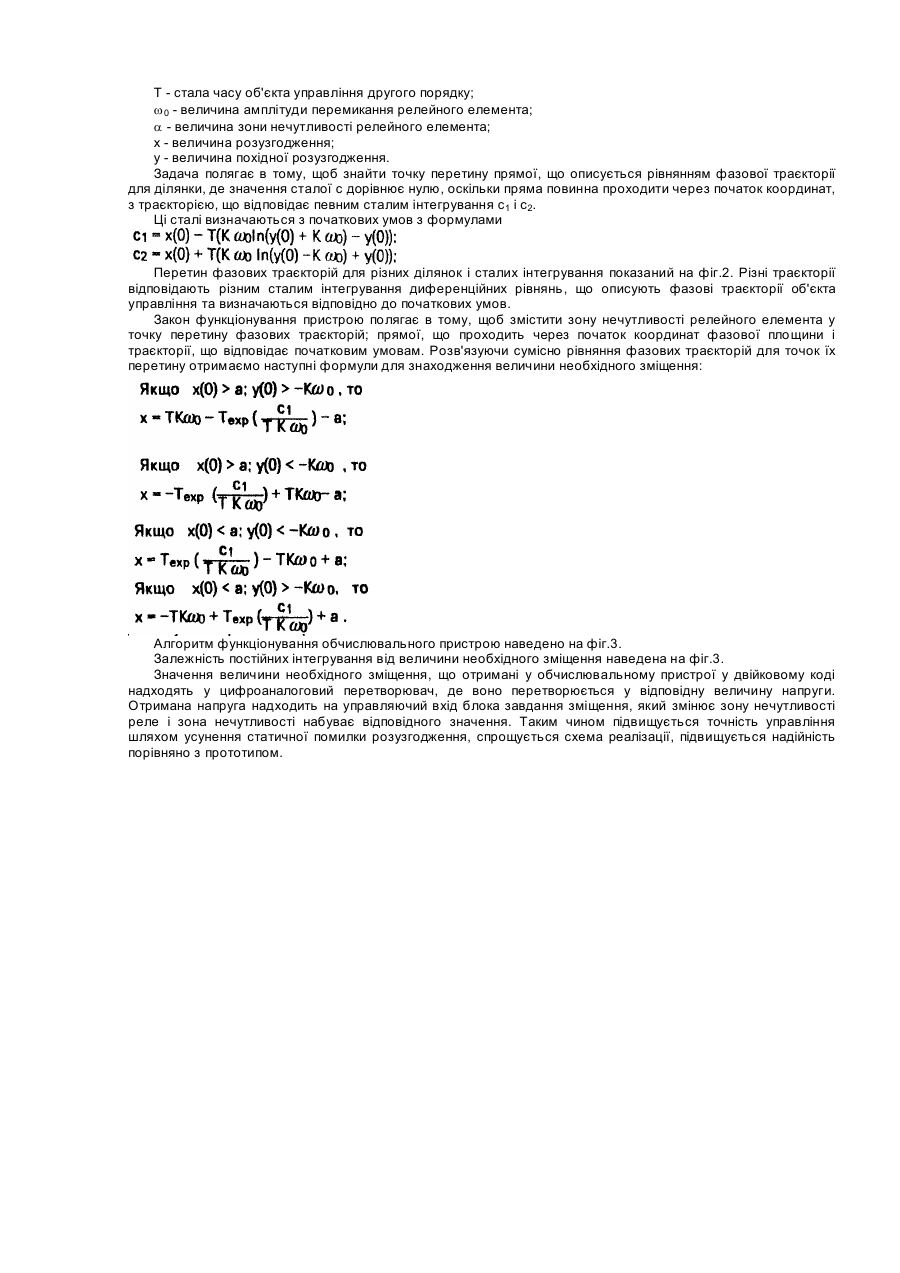
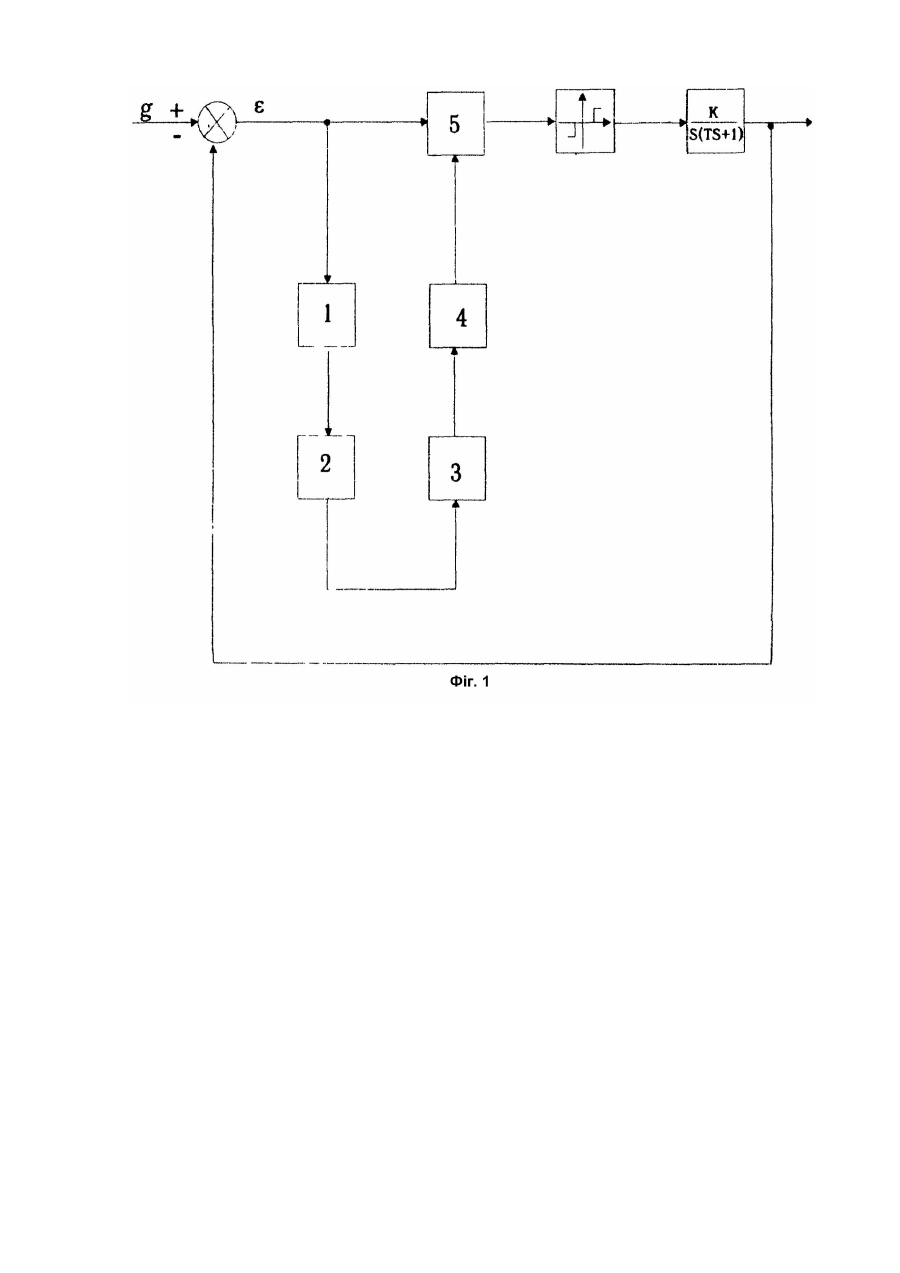
Винахід належить до галузі автоматичного управління і може бути застосованим для управління електродвигунами або будь-якими об'єктами другого порядку. Відомі пристрої, що дозволяють уникнути статичної помилки розузгодження. Ці пристрої є оптимальними і не використовують зміни зони нечутливості релейного елемента. Ці пристрої складаються із першого сумуючого пристрою, один вхід якого з'єднаний з інвертором, другий вхід із входом пристрою, першого диференціатора, вхід якого з'єднаний з виходом першого суматора, а вихід з'єднано із входами першого і другого нелінійних перетворювачів, двох пристроїв множення, входи яких з'єднані з виходом першого суматора і виходом другого суматора, а також з виходом другого диференціатора і виходом другого нелінійного перетворювача, третього суматора, входи якого з'єднані з виходом другого пристрою множення і виходом першого нелінійного перетворювача, а вихід з'єднано із входом релейного елемента без зони нечутливості (Фельдбаум А.А., Бутковский А.Г. Методы теории автоматического управления. - М.: Наука, 1980. - С.622). Недоліком таких пристроїв є наявність великої кількості нелінійних перетворювачів та інших функціональних елементів. Для об'єктів управління другого порядку типу електродвигуна такі управляючі пристрої реалізувати недоцільно через їх високу складність та вартість. Найбільш близьким до винаходу за технічною сутністю є релейний управляючий пристрій, що містить реле із зоною нечутливості, перший вхід якого з'єднаний з входом пристрою і входом фільтра, другий вхід - з виходом інтегратора, при цьому він містить блок завдання зміщення зони нечутливості і з'єднаний послідовно перший суматор, блок визначення амплітуди сигнала і другий суматор, другий вхід якого з'єднано з виходом блока завдання зміщення зони нечутливості, третій вхід - з виходом фільтра, четвертий вхід - з виходом інтегратора, а перший та другий входи першого суматора відповідно з'єднані з входом та виходом фільтра (А.с. СРСР №771612, кл. G05B11/16, 1980). Недоліком цього пристрою є корекція лише динамічних характеристик, що не дозволяє усунути кінцеве розузгодження у статичному режимі, складність технічної реалізації, недостатня якість управління, що не дозволяє використовувати пристрої, побудовані за таким принципом для управління електродвигунами. В основу винаходу поставлено завдання - у відомому релейному управляючому пристрої шляхом зміни конструкції отримати новий технічний результат, який виявляється в усуненні статичної помилки розузгодження та спрощенні схеми реалізації. Поставлене завдання вирішується таким чином. У відомому релейному управляючому пристрої, який містить блок завдання зміщення і релейний елемент, вихід якого з'єднаний з об'єктом управління, відповідно до запропонованого винаходу у нього введені послідовно з'єднані блок вимірювання початкових умов, аналого-цифровий перетворювач, обчислювальний пристрій, цифроаналоговий перетворювач, вихід якого з'єднаний з управляючим входом блока завдання зміщення, причому другий вхід блока завдання зміщення з'єднаний з входом пристрою і з входом блока вимірювання початкових умов. Нова сукупність істотних ознак спрямована на досягнення єдиної мети, а саме: усунення статичної помилки розузгодження, спрощення схеми реалізації та підвищення у такий спосіб надійності пристрою в цілому. На наведених кресленнях представлено релейний управляючий пристрій. На фіг.1 наведена структурна схема пристрою; на фіг.2 - фазова траєкторія об'єкта управління другого порядку; на фіг.3 - алгоритм функціонування обчислювального пристрою; на фіг.4 - графік залежності величини зміщення зони нечутливості від постійних інтегрування диференційних рівнянь фазових траєкторій об'єкта другого порядку. Із структурної схеми, що наведена на фіг.1, видно, що запропонований пристрій складається із з'єднаних послідовно блока вимірювання початкових умов 1, який може бути реалізовано на операційних підсилювачах типу К140УД8, аналого-цифрового перетворювача 2, який може бути побудовано на основі інтегральних аналого-цифрових перетворювачів типу 1107ПВ1, обчислювального пристрою 3 (можна використати мікропроцесорний пристрій мінімальної конфігурації на мікросхемах серії К580), цифроаналогового перетворювача 4, побудованого на основі інтегральних цифроаналогових перетворювачів типу 1107ПА11 блока завдання зміщення 5, який є підсилювачем із змінним коефіцієнтом підсилення і може бути побудованим на транзисторі типу КП103 і операційному підсилювачі типу К140УД8. Значення величин розузгодження та його похідної у початковий момент часу визначаються блоком вимірювання початкових умов. Отримані значення перетворюються аналого-цифровим перетворювачем у двійковий код. Кодові комбінації надходять на вхід обчислювального пристрою. Відомо, що фазові траєкторії об'єкта другого порядку описуються наступними рівняннями (Иващенко Н.Н. Автоматическое регулирование. - М.: Наука, 1980). де K - коефіцієнт підсилення об'єкта другого порядку; T - стала часу об'єкта управління другого порядку; w 0 - величина амплітуди перемикання релейного елемента; a - величина зони нечутливості релейного елемента; x - величина розузгодження; y - величина похідної розузгодження. Задача полягає в тому, щоб знайти точку перетину прямої, що описується рівнянням фазової траєкторії для ділянки, де значення сталої с дорівнює нулю, оскільки пряма повинна проходити через початок координат, з траєкторією, що відповідає певним сталим інтегрування c1 і c2. Ці сталі визначаються з початкових умов з формулами Перетин фазових траєкторій для різних ділянок і сталих інтегрування показаний на фіг.2. Різні траєкторії відповідають різним сталим інтегрування диференційних рівнянь, що описують фазові траєкторії об'єкта управління та визначаються відповідно до початкових умов. Закон функціонування пристрою полягає в тому, щоб змістити зону нечутливості релейного елемента у точку перетину фазових траєкторій; прямої, що проходить через початок координат фазової площини і траєкторії, що відповідає початковим умовам. Розв'язуючи сумісно рівняння фазових траєкторій для точок їх перетину отримаємо наступні формули для знаходження величини необхідного зміщення: Алгоритм функціонування обчислювального пристрою наведено на фіг.3. Залежність постійних інтегрування від величини необхідного зміщення наведена на фіг.3. Значення величини необхідного зміщення, що отримані у обчислювальному пристрої у двійковому коді надходять у цифроаналоговий перетворювач, де воно перетворюється у відповідну величину напруги. Отримана напруга надходить на управляючий вхід блока завдання зміщення, який змінює зону нечутливості реле і зона нечутливості набуває відповідного значення. Таким чином підвищується точність управління шляхом усунення статичної помилки розузгодження, спрощується схема реалізації, підвищується надійність порівняно з прототипом.
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05B 11/01
Мітки: пристрій, релейний, управляючий
Код посилання
<a href="https://ua.patents.su/5-24465-relejjnijj-upravlyayuchijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Релейний управляючий пристрій</a>
Релейний пристрій
Номер патенту: 1097
Опубліковано: 30.12.1993
Автор: Дмитренко Леонід Петрович
МПК: H01H 47/22
Формула / Реферат:
1. Релейное устройство, содержащее управляющий пороговый и согласующий элементы, первый транзистор, симистор, первый и второй конденсаторы, балластный элемент, первый диод, клеммы для подключения к сети переменного тока и клеммы для подключения нагрузки, причем вход порогового элемента подключен к выходу управляющего элемента, а выход - к входу согласующего элемента, к выходу которого подключена база первого транзистора, при этом первый...
Релейний пристрій
Номер патенту: 667
Опубліковано: 15.12.1993
Автор: Дмитренко Леонід Петрович
МПК: H01H 47/22
Формула / Реферат:
Формула изобретенияРелейное устройство, содержащее конденсатор, делитель напряжения, образованный первым резистором и терморезистором, однопереходный транзистор с RC-контуром на входе, тиристор, диод, второй резистор и выводы для подключения источника переменного тока, причем первый вывод для подключения нагрузки соединен с одним из выводов для подключения источника переменного тока, делитель напряжения и однопереходный транзистор...
Релейний пристрій
Номер патенту: 7695
Опубліковано: 26.12.1995
Автори: Барданов Валерій Олександрович, Голубчиков Олександр Митрофанович, Кібрик Ісаак Соломонович, Зеленецький Володимир Миколайович, Шапошнік Василь Іванович
МПК: H01H 47/00
Формула / Реферат:
Релейное устройство по авт. св. № 517074, отличающееся тем, что, с целью расширения функциональных возможностей, в параллельные цепи последовательно с диодами включено по одному ключу управления.
Релейний блок для вибухозахищених електричних апаратів
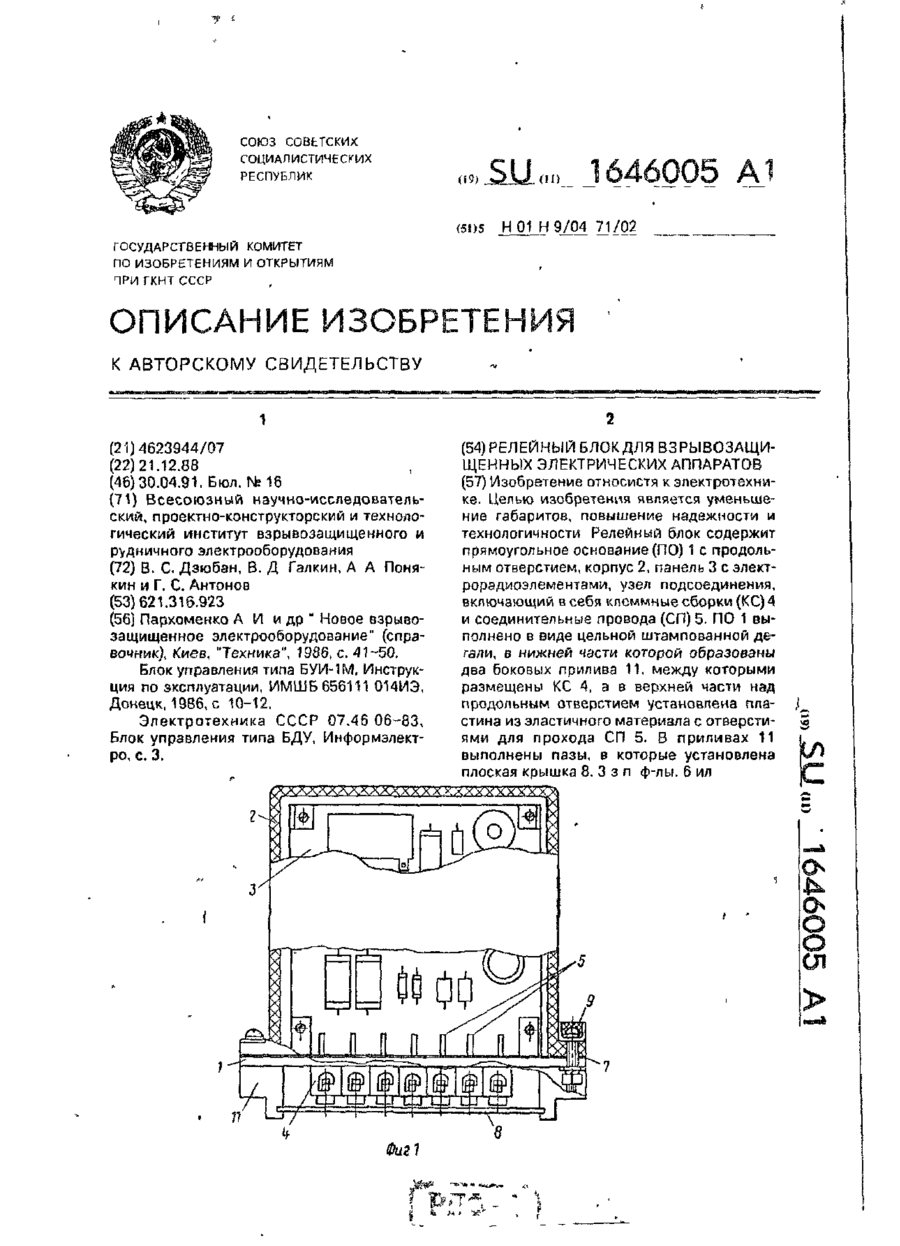
Номер патенту: 8644
Опубліковано: 30.09.1996
Автори: Антонов Григорій Семенович, Галкін Василь Дмитрович, Понякін Олександр Олексійович, Дзюбан Віталій Серафимович
МПК: H01H 71/02, H01H 9/04
Мітки: вибухозахищених, блок, електричних, апаратів, релейний
Формула / Реферат:
1. Релейный блок для взрывозащищенных электрических аппаратов, содержащий прямоугольное основание с продольным отверстием, корпус, выполняющий роль крышки, по меньшей мере одну панель с электрорадиоэлементами, узел подсоединения, включающий в себя клеммные сборки и соединительные проводники, проходящие от панели к клеммным сборкам, отличающийся тем, что, с целью уменьшения габаритов, повышения надежности и технологичности, он снабжен...
Пристрій для перетворення відеосигналу
Номер патенту: 18441
Опубліковано: 25.12.1997
Автори: Кондратов Петро Олександрович, Мешков Олег Кузьмич, Боженко Ігор Борисович
МПК: H04N 5/33
Мітки: перетворення, відеосигналу, пристрій
Формула / Реферат:
1. Пристрій для перетворення відеосигналу, що містить послідовно з'єднані аналого-цифровий перетворювач (АЦП), два входи якого є відповідно сигналь ним і управляючим входами пристрою, арифметичний блок і перший комутатор, другий вхід якого з'єднаний з другим входом арифметичного блока і виходом блока пам'яті, синхровхід якого з'єднаний з першим виходом блока синхронізації, а вихід першого комутатора є сигнальним виходом пристрою, який...
Попередній патент: Вітрова гребля
Наступний патент: Спосіб діагностики захворювань щитовидної залози
Випадковий патент: Склад для виготовлення помадних цукерок "беліссімо" коньяк з лимоном