Моноімпульсна система з амплітудно-фазовим пеленгатором цілей
Номер патенту: 11186
Опубліковано: 15.12.2005
Автори: Вершинін Ігор Павлович, Лезік Олександр Віталійович, Челпанов Володимир Валентинович


Формула / Реферат
Моноімпульсна система з амплітудно-фазовим пеленгатором цілей, що містить два паралельно включених приймальних канали, перший канал у складі послідовно включених першого змішувача, першого підсилювача проміжної частоти (ППЧ), першого вимірювача фази, першого цифрового корелятора, першого блока оцінки параметрів фази, та другий приймальний канал у складі послідовно включених другого змішувача, другого ППЧ, а також синтезатор частот та блок перерахунку параметрів кутомісцевої траєкторії, яка відрізняється тим, що додатково введені послідовно з'єднані другий вимірювач фази, другий цифровий корелятор, другий блок оцінки параметрів фази, а також перший та другий вимірювачі амплітуди, пороговий блок та блок аналізу функцій невизначеності, перший вихід синтезатора частоти з'єднаний з другими входами змішувача частоти, другий вихід синтезатора з'єднаний з другими входами вимірювачів фази, входи першого та другого вимірювачів амплітуди з'єднані з виходами відповідно першого та другого ППЧ, а виходи вимірювачів амплітуди - з другими входами цифрових кореляторів, перший вхід другого вимірювача фази з'єднаний з виходом другого ППЧ, перший і другий входи порогового блока з'єднані з виходами відповідно першого та другого цифрового корелятора, а виходи порогового блока - з входами блока аналізу функцій невизначеності, виходи першого та другого блоків оцінки параметрів фази з'єднані з входами блока перерахунку параметрів кутомісцевої траєкторії, входами системи є входи першого та другого змішувачів, а виходами системи - виходи блока аналізу функцій невизначеності та блока перерахунку параметрів кутомісцевої траєкторії.
Текст
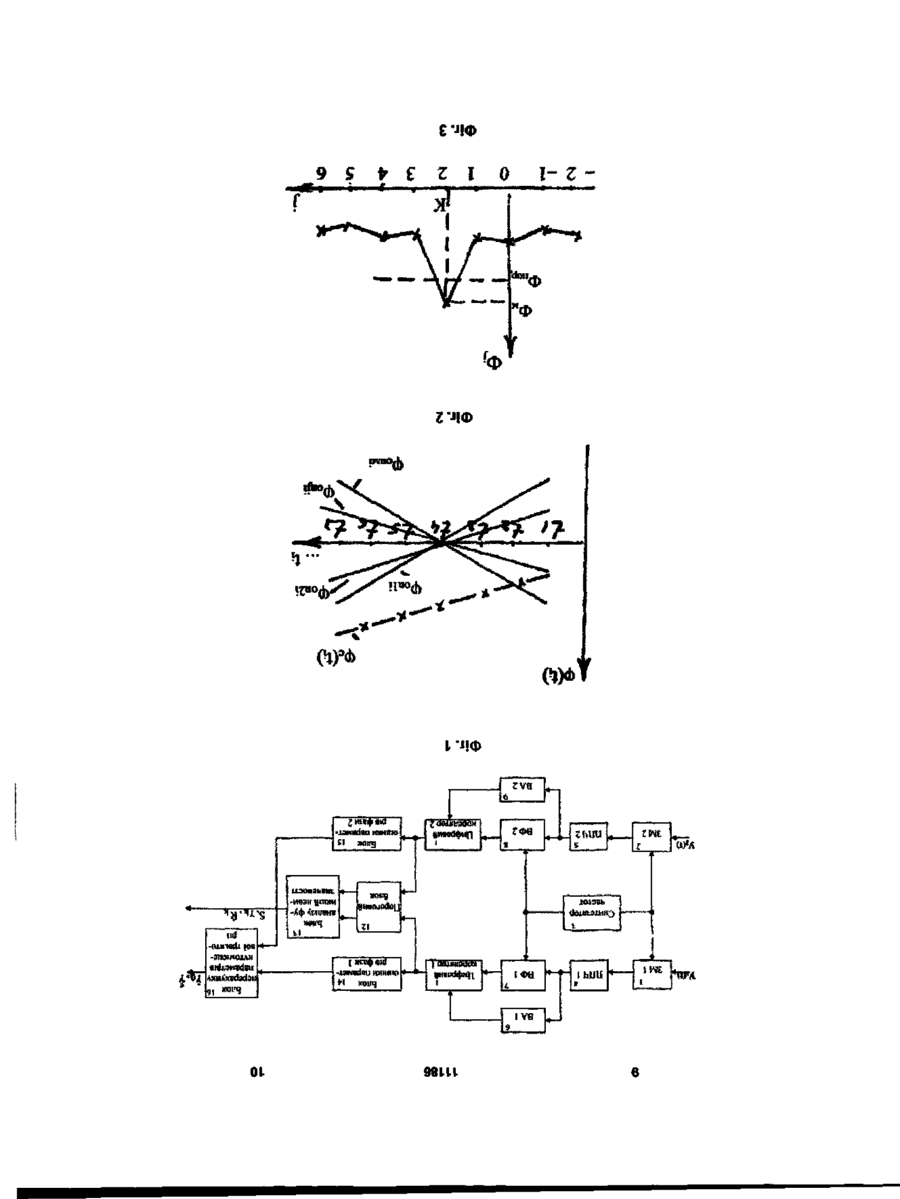
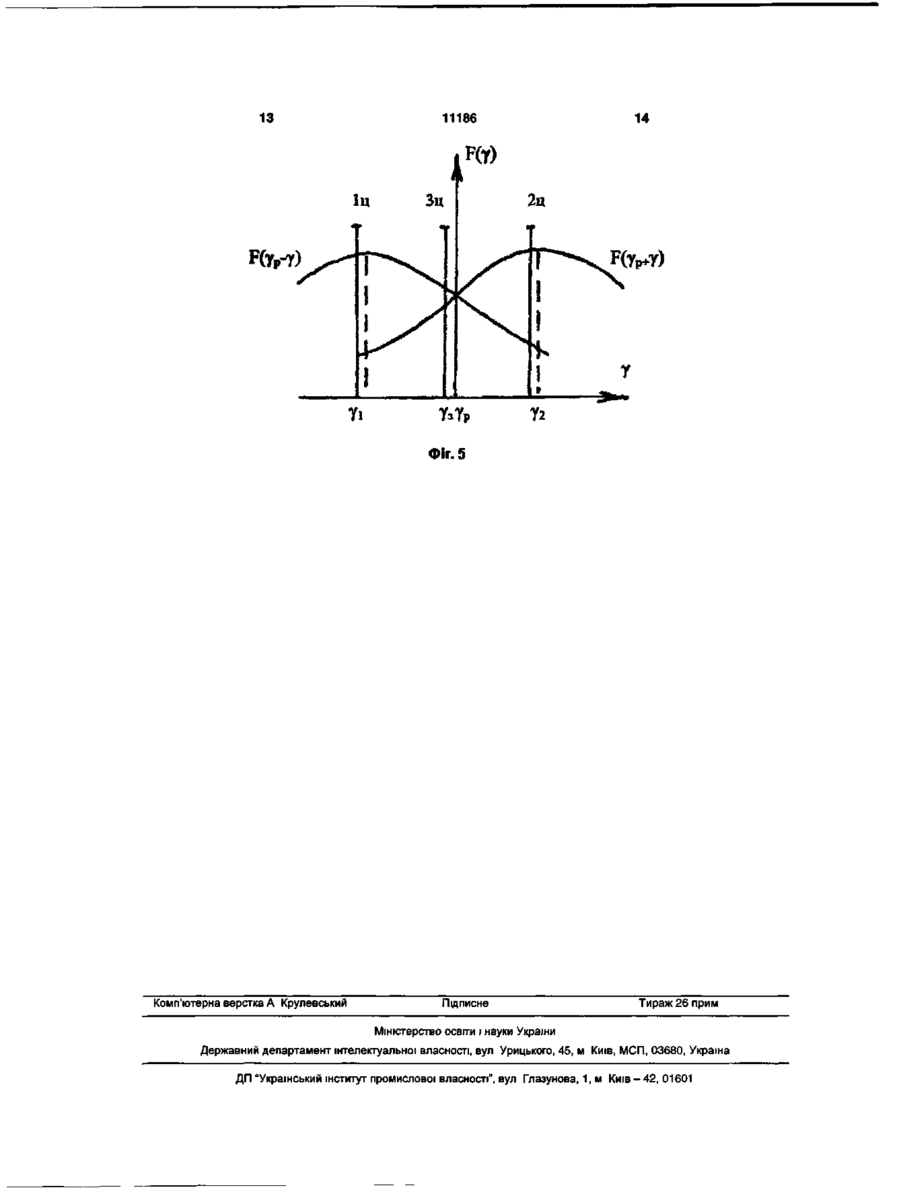
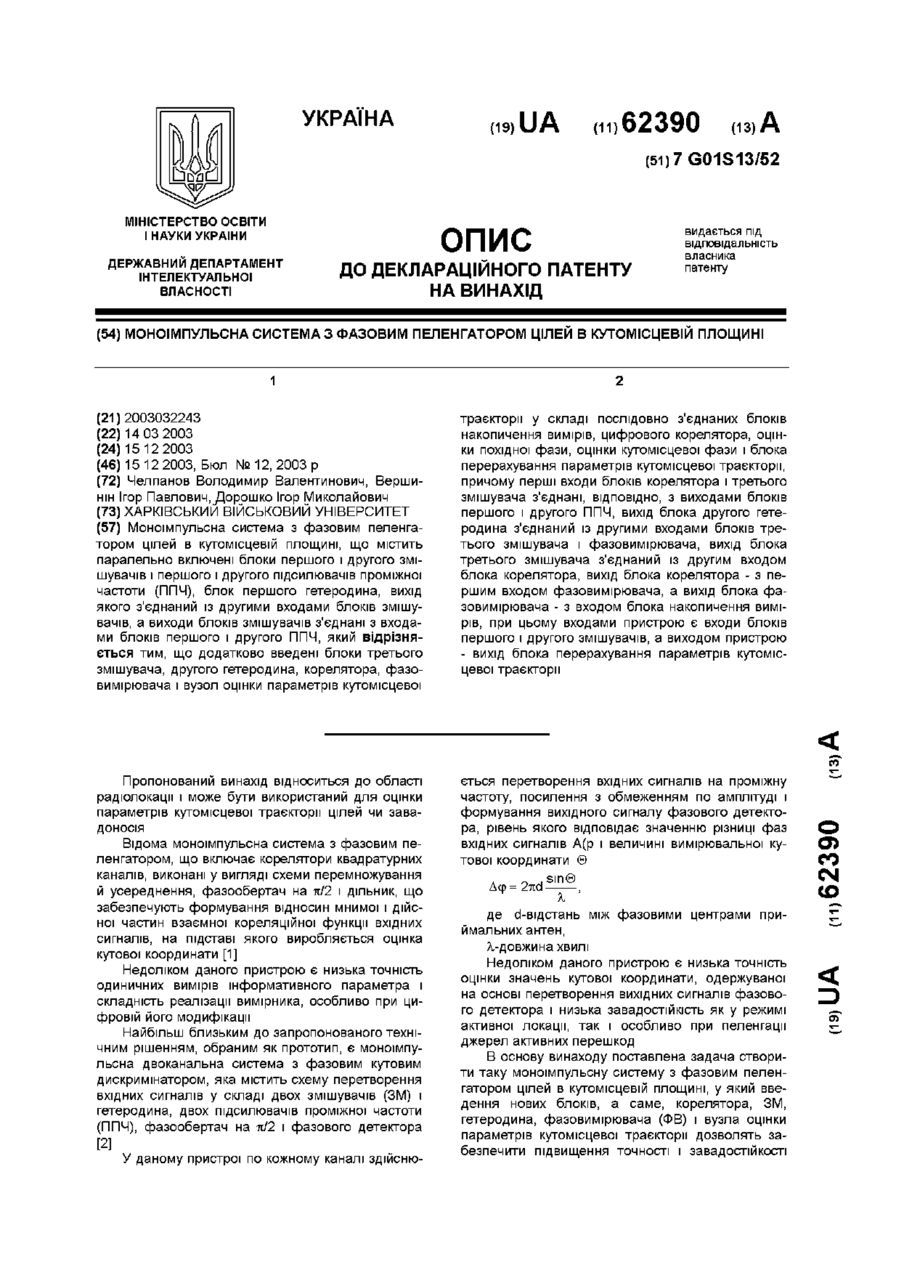
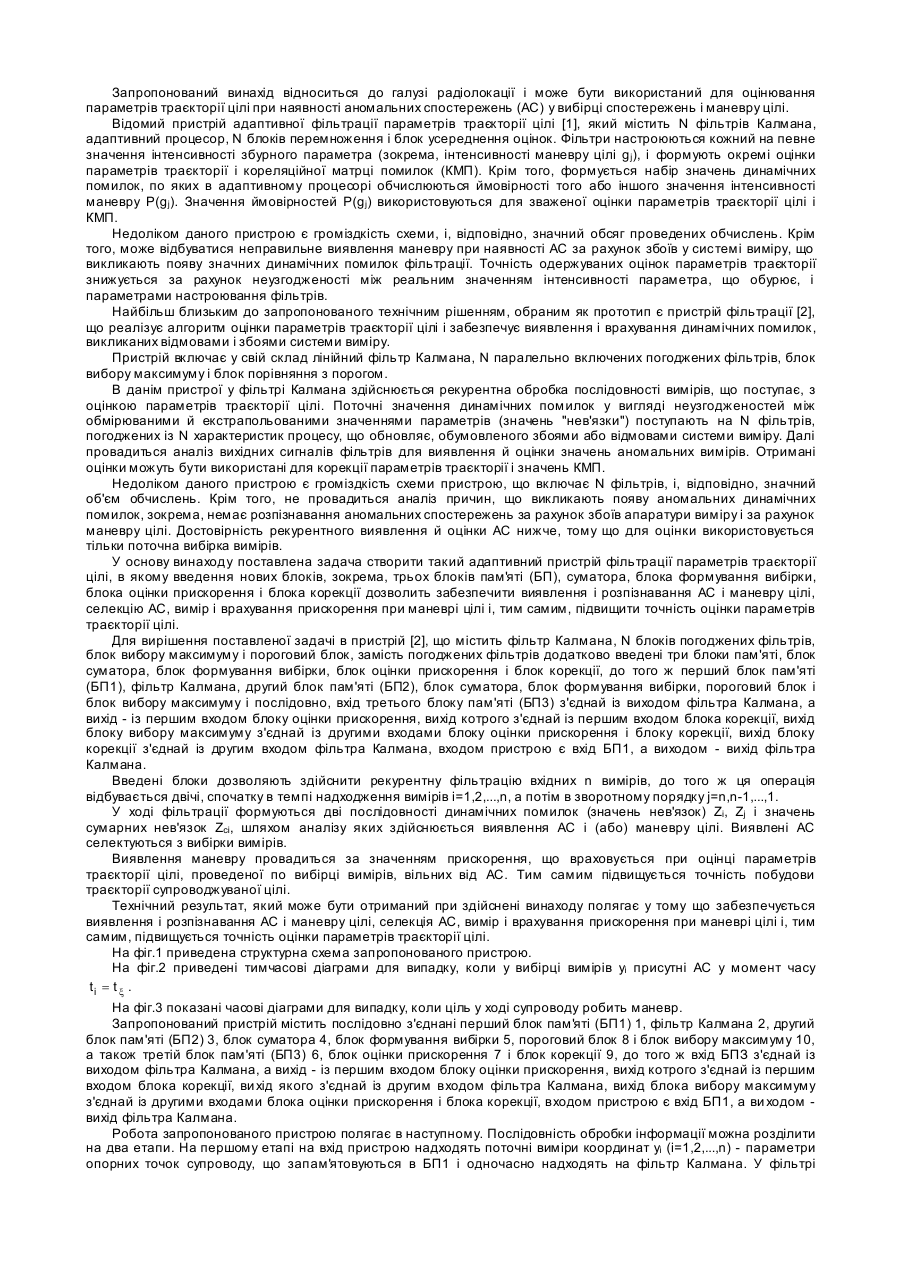
Моноімпульсна система з амплітуднофазовим пеленгатором цілей, що містить два паралельно включених приймальних канали, перший канал у складі послідовно включених першого змішувача, першого підсилювача проміжної частоти (ППЧ), першого вимірювача фази, першого цифрового корелятора, першого блока оцінки параметрів фази, та другий приймальний канал у складі послідовно включених другого змішувача, другого ППЧ, а також синтезатор частот та блок перерахунку параметрів кутомісцевої траєкторії, яка відрізняється тим, що додатково введені послідовно з'єднані другий вимірювач фази, другий цифровий корелятор, другий блок оцінки парамет рів фази, а також перший та другий вимірювачі амплітуди, пороговий блок та блок аналізу функцій невизначеності, перший вихід синтезатора частоти з'єднаний з другими входами змішувача частоти, другий вихід синтезатора з'єднаний з другими входами вимірювачів фази, входи першого та другого вимірювачів амплітуди з'єднані з виходами відповідно першого та другого ППЧ, а виходи вимірювачів амплітуди - з другими входами цифрових кореляторів, перший вхід другого вимірювача фази з'єднаний з виходом другого ППЧ, перший і другий входи порогового блока з'єднані з виходами відповідно першого та другого цифрового корелятора, а виходи порогового блока - з входами блока аналізу функцій невизначеності, виходи першого та другого блоків оцінки параметрів фази з'єднані з входами блока перерахунку параметрів кутомісцевої траєкторії, входами системи є входи першого та другого змішувачів, а виходами системи виходи блока аналізу функцій невизначеності та блока перерахунку параметрів кутомісцевої траєкторії. Запропонована корисна модель відноситься до галузі радіолокації і може бути використана для оцінки кутового положення цілей, в тому числі у випадку, коли цілі є складними, тобто складаються з кількох елементів. Відома моноімпульсна система з фазовим кутовим дискримінатором [1], що включає схему перетворення, яка забезпечує формування рівня вихідного сигналу, що відповідає значенню кутомісцевої різниці фаз вхідних сигналів. Недоліком даного пристрою є низька точність оцінки значень кутової координати, отриманої на основі перетворень одиночних сигналів фазового детектора, і, крім того, великі помилки, коли ціль є складною. Найбільш близьким до запропонованого технічним рішенням, обраним як прототип, є моноімпульсна система з фазовим пеленгатором цілей в кутомісцевій площині [2], що містить паралельно включені блоки змішувачів та підсилювачів, блок першого та другого гетеродина, блоки вимірювача фази, корелятора та вузол оцінки параметрів кутомісцевої траєкторії. Система дозволяє підвищити точність оцінки параметрів кутомісцевої траєкторії за рахунок когерентного накопичення вхідних вимірювань. Недоліком системи-прототипу є зниження точності визначення кутових координат у випадку, коли ціль є складною, та неможливість здійснювати розв'язання елементів складної цілі. В основу корисної моделі поставлена задача створити моноімпульсну систему з амплітуднофазовим пеленгатором цілей, в якій введення нових блоків, а саме двох вимірювачів амплітуди, другого вимірювача фази, другого цифрового корелятора, другого блока оцінки параметрів фази, порогового блока та блока аналізу функцій невизначеності, дозволяє забезпечити високу точність оцінки параметрів кутомісцевої траєкторії одиночної цілі, а також розв'язання складної цілі за раді (О 00 < 11186 альною швидкістю з оцінкою кутового положення її елементів Поставлена задача вирішується за рахунок того що в моноімпульсну систему з фазовим пеленгатором цілей [2] яка складає паралельно включені блоки першого і другого змішувачів, першого і другого підсилювачів проміжної частоти, а також синтезатор частоти, вимірювач фази, цифровий корелятор, блок оцінки параметрів фази та блок перерахунку параметрів кутомісцевої траєкторії, додатково включені перший та другий вимірювачі амплітуди, другий вимірювач фази, другий цифровий корелятор, другий блок оцінки параметрів фази, пороговий блок та блок аналізу функцій невизначеності Блоки змішувачів, підсилювачів проміжної частоти, вимірювачів фази, цифрового корелятора, оцінки параметрів фази в кожному із двох приймальних каналів з'єднані послідовно Перший вихід синтезатора частоти з'єднаний з другими входами змішувачів, а другий вихід - з другими входами вимірювачів фази Входи вимірювачів амплітуди ВІДПОВІДНОГО приймального каналу з'єднані з виходами підсилювачів проміжної частоти, а виходи - з другими входами цифрових кореляторів Перший та другий входи порогового блоку з'єднані з виходами ВІДПОВІДНИХ цифрових кореляторів, а виходи порогового блока - з входами блока аналізу функцій невизначеності Виходи першого та другого блоків оцінки параметрів фази з єднані з входами блока перерахунку параметрів кутомісцевої траєкторії Технічний результат, який може бути отриманий при здійсненні корисної моделі полягає у можливості забезпечити за рахунок певного накопичення амплітудно-фазової інформації високу точність оцінки параметрів кутомісцевої траєкторії, а також, використовуючи високу розв'язуючу спроможність по радіальній швидкості когерентної ПОСЛІДОВНОСТІ ехо-сигналів, виділити елементи складно» ЦІЛІ та за результатами кореляційно» обробки оцінити їх кутове положення відносно рівносигнального напряму діаграми спрямованості На Фіг 1 приведена структурна схема запропонованої системи На Фіг 2 показано вид функції фази ехосигналів для одного із приймальних каналів та опорні функції фази, які використовуються для кореляційної обробки На Фіг 3 приведені результати кореляційної обробки звичайної функції фаз, які проводяться в ході оцінки параметрів кутомісцевої траєкторії для випадку одиночної ЦІЛІ (функція невизначеності, яка складається із значень кореляційного інтеграла) На Фіг 4 приведені функції невизначеності ВІДПОВІДНО для першого та другого приймальних каналів для випадку складної ЦІЛІ, яка складається з трьох елементів На Фіг 5 показані діаграми спрямованості по кутовій координаті двох прийомних каналів та розміщення трьох елементів складної ЦІЛІ ВІДНОСНО рівносигнального напряму Запропонована моноімпульсна система з амплітудно-фазовим пеленгатором цілей складається із двох паралельно включених приймальних кана лів, перший з яких має послідовно з'єднані перший змішувач (ЗМ) 1, перший підсилювач проміжної частоти (ППЧ) 4, перший вимірювач фази (ВФ) 7 перший цифровий корелятор 10 та блок оцінки параметрів фази 14 Другий приймальний канап має послідовно з'єднані другий ЗМ 2, другий ППЧ 5, другий ВФ 8, другий цифровий корелятор 11 та другий блок оцінки параметрів фази 15 Система включає синтезатор частот 3, перший вихід якого з'єднаний з другими входами змішувачів 1, 3, а другий вихід - із другими входами вимірювачів фази 7, 8, перший вимірювач амплітуди (ВА) 6 та другий вимірювач амплітуди 9 входи яких з'єднані ВІДПОВІДНО з виходами першого і другого ППЧ 4 5 а виходи - з другими входами цифрових кореляторів 10, 11, пороговий блок 12, два входи якого з'єднані з виходами ВІДПОВІДНО першого та другого цифрового корелятора Блок аналізу функції невизначеності 13, два входи якого з'єднані з виходами порогового блоку, блок перерахунку параметрів кутомісцевої траєкторії 16, два входи якого підключені до виходів ВІДПОВІДНО першого та другого блоків оцінки параметрів фази Входами системи є входи першого та другого змішувачів, а виходами виходи блоку перерахунку параметрів кутомісцевої траєкторії 16 та блоку аналізу функцій невизначеності 13 Робота запропонованої системи полягає у наступному На входи першого та другого змішувачів 1, 2 надходять ехо-сигнали на несучій частоті fH з антенних систем, фазові центри яких рознесені на відстань d В змішувачах здійснюється перетворення сигналів на проміжну частоту fnp, з використанням сигналу гетеродина від синтезатора частоти Іпр = • г • Ін В підсилювачах проміжної частоти (ППЧ) 4, 5 сигнали двох приймальних каналів підсилюються і надходять на вимірювачі фази 7, 8 та амплітуди 6, 9 де визначаються кодові значення фази і, а та амплітуди Ац, А2, в кожному 7-ому такті, в яких працює РЛС, де і = 1, 2, N Вимірювання фази ехо-сигналів здійснюється відносно фази сигналу проміжної частоти, який формується тим самим синтезатором частоти, що і гетеродинний сигнал, для забезпечення когерентності обробки інформації Значення одержаної функції фази , визначається параметрами траєкторії ЦІЛІ - дальністю Ro та радіальною швидкістю R 9,=R 0 +Rt,,(1) де t, = і Т, Т - період повторення зондуючих імпульсів РЛС Інформативними параметрами є значення різниці фаз і= і - а та співвідношення амплітуд сигналів двох приймальних каналів, які визначаються параметрами траєкторії ЦІЛІ за кутовою координатою о Y Для фазового пеленгатора 2icd ... Дф = sin у (2) А. В цифрових кореляторах 10, 11 здійснюється 11186 кореляційна обробка амплітудно-фазової інформації в кожному з двох приймальних каналів, з метою визначення параметрів функції фази Параметри функцій фази визначаються параметрами кутомісцевої траєкторії: Де Для оцінки швидкості зміни фази (кута нахилу функції фази) фі і ф2 в кожному приймальному каналі здійснюється кореляційна обробка. Для цього в цифрових кореляторах 10, 11 одержані функції фази і, а порівнюються з набором з М опорних (еталонних) функцій фази ф0П],. Порівнювання проводиться шляхом розрахунку М значень кореляційного інтеграла Ф Х,Дфо = Yo = arcsin 2nd = Yo = arcsin = Ф01 - Ф02 » " 2 і • ХДф _ 2nd ' ФІ= ~ Ф 0 П ]і Значення опорних функцій фази змінюються за лінійним законом, а самі опорні функції відрізняються кутом нахилу (параметром ф): t0 =o,5(tN-t1); де ti, to, tN - моменти часу, які відповідають початку, середині та завершенню інтервалу спостереження (супроводження цілі). Значення дискретності відрахунку похідної фази 8ф вибираються виходячи з точності одержаних оцінок, яка визначається часом спостереження( супроводження) цілі : *=£.«» де x = t N - t 1 . Діапазон аналізу X < Дф ФПор, то одержана оцінка рахується правильною. Крім того, в блоках 14, 15 виробляються оцінки параметрів початкової фази ф О і, фо2 • як постійної складової функції фази ф,: f , (10) ІСО5(ф,-фкі) де фк, - значення к-ой опорної функції фази, при порівнянні з якою одержано максимальне значення кореляційного інтеграла Ф м : Фк, =к5ф(і, - t 0 ) . (11) Значення оцінок параметрів фази двох приймальних каналів ф01, ф7 та ф 0 2 , ф2 надходять на блок перерахунку параметрів кутомісцевої траєкторії. де проводиться їх перерахунок в значення параметрів кутомісцевої траєкторії в потрібній системі координат у 0 та у у відповідності з виразами (3), (4), (5). Таким чином, кутомісцева траєкторія буде описана полиномом першої ступені на момент прив'язки (середини інтервалу супроводження to): Y(t,)Yo+Y(t,-to).(12) У випадку складної цілі результуюча функція фази ехо-сигналів визначається параметрами руху окремих елементів складної цілі. S Ф, = ?=1 ,(13) , cos фд де ^ = 1,2,...s; s - число елементів складної цілі; А £| , ф£| - значення амплітуди і фази ехосигналів від £ - го елемента складної цілі. При цьому значно збільшуються помилки у визначенні кутової координати цілі, які можуть перевищувати розмір складної цілі за даною координатою [1, с 129]. Функції невизначеності для складної цілі, складені із значень кореляційних інтегралів Ф 1 г Ф 2 ] , мають багатопіковий (багатопелюстковий) характер. Кількість піків відповідає кількості елементів у складі складної цілі. 11186 Координати локальних максимумів відповідають радіальній швидкості елементів складної ЦІЛІ вони співпадають для обох приймальних каналів Амплітуди цих ПІКІВ щодо кожного каналу визначаються ступенем ВІДПОВІДНОСТІ функцій фази ехосигналів та опорних функцій (Фіг 4) Співвідношення амплітуд однойменних ПІКІВ двох приймальних каналів визначається положенням ВІДПОВІДНИХ елементів складної ЦІЛІ ВІДПОВІДНО рівносигнального напряму в межах діаграми спрямованості за кутовою координатою Амплітуда локального піка функції невизначеності Ф к за сигналом першого елемента ЦІЛІ буде більшою в першому каналі, другого елемента - в другому каналі, а третього елемента - приблизно однаковою для обох каналів (Фіг 5) Більш точне розміщення елементів складної ЦІЛІ відносно рівносигнального напряму діаграми спрямованості можна оцінити по співвідношенню амплітуд локальних ПІКІВ ДВОХ прийомних каналів Для к-го елемента = « - ^ Ф 2к 8 o f , ON • дисперсія оцінок, одержаних ВІДПОВІДНО за одним та N вимірюванням фази Так, наприклад, дисперсія оцінки кутомісцевої фази Ф п о р та Ф^ ^ Ф п о р для j = к1, к2, кЗ (Фіг 4) У блоці аналізу функцій невизначеності 13 відбувається підрахунок числа локальних ПІКІВ S (ВІДПОВІДНИХ числу елементів складної ЦІЛІ) та оцінка кутових координат елементів ЦІЛІ В межах діаграми спрямованості у ВІДПОВІДНОСТІ З виразами (14), (15) На вихід системи видається така інформація у випадку одиночної ЦІЛІ - параметри кутомісцевої траєкторії у 0 , у у випадку складної ЦІЛІ - КІЛЬКІСТЬ І'І елементів S, значення кутових координат елементів ЦІЛІ ук та розрішаючих параметрів за радіальною швидкістю RK Позитивний ефект, який дає використання запропонованого пристрою полягає у тому, що когерентне накопичення й обробка N вимірів забезпечує збільшення точності побудови параметрів кутомісцевої траєкторії ф 0 , ф [2], Для одиночної ЦІЛІ, де Т - період надходження замірів де Оу - середньоквадратичне відхилення вимірювання кутової координати елемента складної ЦІЛІ, q - відношення сигнал/шум, К - коефіцієнт, який визначається формою діаграми спрямованості (крутизною пеленгаційної характеристики), Ду 0 5 р - ширина діаграми спрямованості приймального каналу за рівнем половинної потужності Джерела інформації 1 Леонов А И Фомичев К И Моноимпульсная радиолокация - М Радио и связь, 1984 - с 13 2 Д п 62390А, Україна, 6 МПК G01S 13/52 Моноімпульсна система з фазовим пеленгатором цілей в кутомісцевій площині / В В Челпанов, І П Вершинін, І М Дорошко - №2003032243, Заявл 14 03 2003, Опубл 15 12 2003 Бюл №12 3 Воллернер М Ф Радиоприемные приборы К Вища школа, 1993 - 391 с 4 Гитис Э И Преобразователи информации для ЭЦВМ - М Энергия, 1975 - 189 с 5 Цифровые и аналоговые интегральные микросхемы Справочник Под ред С В Якубовского -М Радио и связь 1980 - 4 1 2 с 6 Обработка сигналов в многоканальных РЛС / Под ред А П Лукошкина - М Радио и связь, 1983 -328 с Є міф 9 5 П 0 \-г І'ЦФ UFA 98 U І 11 11186 12 ф, 1 2 3 4 5 6 7 8 9 І 0 12 3 4 5 6 7 S 9 10 11 12 Фіг. 4 13 Комп'ютерна верстка А Крулевський 11186 Підписне 14 Тираж 26 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул Урицького, 45, м Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул Глазунова, 1, м Київ - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMonopulse radar with an amplitude-and-phase target direction finder
Автори англійськоюChelpanov Volodymyr Valentynovych
Назва патенту російськоюМоноимпульсная радиолокационная система с амплитудно-фазовым пеленгатором целей
Автори російськоюЧелпанов Владимир Валентинович
МПК / Мітки
МПК: G01S 13/52
Мітки: система, цілей, моноімпульсна, пеленгатором, амплітудно-фазовим
Код посилання
<a href="https://ua.patents.su/8-11186-monoimpulsna-sistema-z-amplitudno-fazovim-pelengatorom-cilejj.html" target="_blank" rel="follow" title="База патентів України">Моноімпульсна система з амплітудно-фазовим пеленгатором цілей</a>
Моноімпульсна система з фазовим пеленгатором цілей в кутомісцевій площині
Номер патенту: 62390
Опубліковано: 15.12.2003
Автори: Дорошко Ігор Миколайович, Вершинін Ігор Павлович, Челпанов Володимир Валентинович
МПК: G01S 13/52, G01S 13/00
Мітки: система, моноімпульсна, фазовим, цілей, пеленгатором, кутомісцевій, площині
Формула / Реферат:
Моноімпульсна система з фазовим пеленгатором цілей в кутомісцевій площині, що містить паралельно включені блоки першого і другого змішувачів і першого і другого підсилювачів проміжної частоти (ППЧ), блок першого гетеродина, вихід якого з'єднаний із другими входами блоків змішувачів, а виходи блоків змішувачів з'єднані з входами блоків першого і другого ППЧ, який відрізняється тим, що додатково введені блоки третього змішувача, другого...
Адаптивний пристрій фільтрації параметрів траєкторії цілей
Номер патенту: 67043
Опубліковано: 15.06.2004
Автори: Яровий Сергій Володимирович, Челпанов Артем Володимирович, Карлов Володимир Дмитрийович, Рафальський Юрій Іванович, Петрушенко Миколай Миколайович
МПК: G01S 13/52
Мітки: цілей, параметрів, пристрій, траєкторії, фільтрації, адаптивний
Формула / Реферат:
Адаптивний пристрій фільтрації параметра траєкторії цілі, що містить фільтр Калмана, пороговий блок і блок вибору максимуму, який відрізняється тим, що додатково введені три блоки пам'яті, блок суматора, блок формування вибірки, блок оцінки прискорення і блок корекції, до того ж, перший блок пам'яті, блок фільтра Калмана, другий блок пам'яті, блок суматора, блок формування вибірки, пороговий блок і блок вибору максимуму з'єднані послідовно,...
Адаптивний пристрій супроводу маневруючих цілей

Номер патенту: 56074
Опубліковано: 15.04.2003
Автори: Карлов Володимир Дмитрийович, Пащенко Руслан Едуардович, Сірик Юрій Анатолійович, Челпанов Артем Володимирович, Яровий Сергій Володимирович, Коваль Олександр Андрійович
МПК: G01S 13/00, G01S 13/52
Мітки: пристрій, супроводу, адаптивний, цілей, маневруючих
Формула / Реферат:
Адаптивний пристрій супроводу маневруючих цілей, що містить послідовно з'єднані блоки фільтра Калмана другого порядку, фільтра Калмана третього порядку і комутатор, який відрізняється тим, що додатково введені блок виявлення маневру і блок оцінки інтенсивності маневру, причому блок виявлення маневру складається із послідовно з'єднаних блока формування вибірок, блока обчислення рангу, блока обчислення рангової статистики і порогового блока, а...
Спосіб вимірювання різниці часу затримки вузькосмугового радіосигналу з обмеженим інтервалом кореляції та пристрій для його здійснення
Номер патенту: 66378
Опубліковано: 17.05.2004
Автори: Клепфер Євген Іванович, Антонюк Володимир Павлович, Григор'єва Людмила Володимирівна
МПК: G01S 13/42, G01S 13/06, G01S 5/00
Мітки: кореляції, затримки, інтервалом, обмеженим, здійснення, різниці, вимірювання, часу, пристрій, вузькосмугового, радіосигналу, спосіб
Формула / Реферат:
1. Спосіб вимірювання різниці часу затримки вузькосмугового радіосигналу з обмеженим інтервалом кореляції, оснований на визначенні попереднього наближення різниці затримки сигналу по максимуму огинаючої взаємної кореляційної функції з подальшим уточненням результату по даних вимірювання фази в точці попереднього наближення, який відрізняється тим, що в умовах апріорної невизначеності несучої частоти сигналу, одночасно з вимірюванням фази...
Синхронізований автогенератор з негативним фазовим оберненим зв’язком
Номер патенту: 37911
Опубліковано: 15.05.2001
Автори: Карпенко Олександр Федорович, Рапін Володимир Васильович
МПК: H03L 7/00
Мітки: оберненим, синхронізований, автогенератор, негативним, зв'язком, фазовим
Текст:
...на перший вхід перемножувача 9. На другий вхід перемножувача 9, який також є другим входом блоку формування сигналу синхронізації, поступає вихідний сигнал синхронізованого автогенератора 6 у вигляді ug =Ag cos(wct+j). u9=А9соs(3wct+j+2j0)+А9cos(wct+ +2j0-j) є ви хідним сигналом перемножувача 9, який обробляється фільтром низьких частот 10, що вилучає третю гармоніку. Оскільки зміна частоти зовнішнього сигналу мала, то додатковий фазовий...
Попередній патент: Дорога з замкненим тяговим канатом
Наступний патент: Система для сухого подрібнення матеріалів
Випадковий патент: Спосіб отримання сполуки 2-(n-ортотрифторметилфенілсукцинімідо-3)-меркаптобензойна кислота з потенційними біологічними властивостями