Радіально-кувальна машина
Номер патенту: 36032
Опубліковано: 16.04.2001
Автори: Артамонов Юрій Вікторович, Безкровний Михайло Григорович, Лазоркін Віктор Андрійович, Терновий Юрій Федорович
Текст
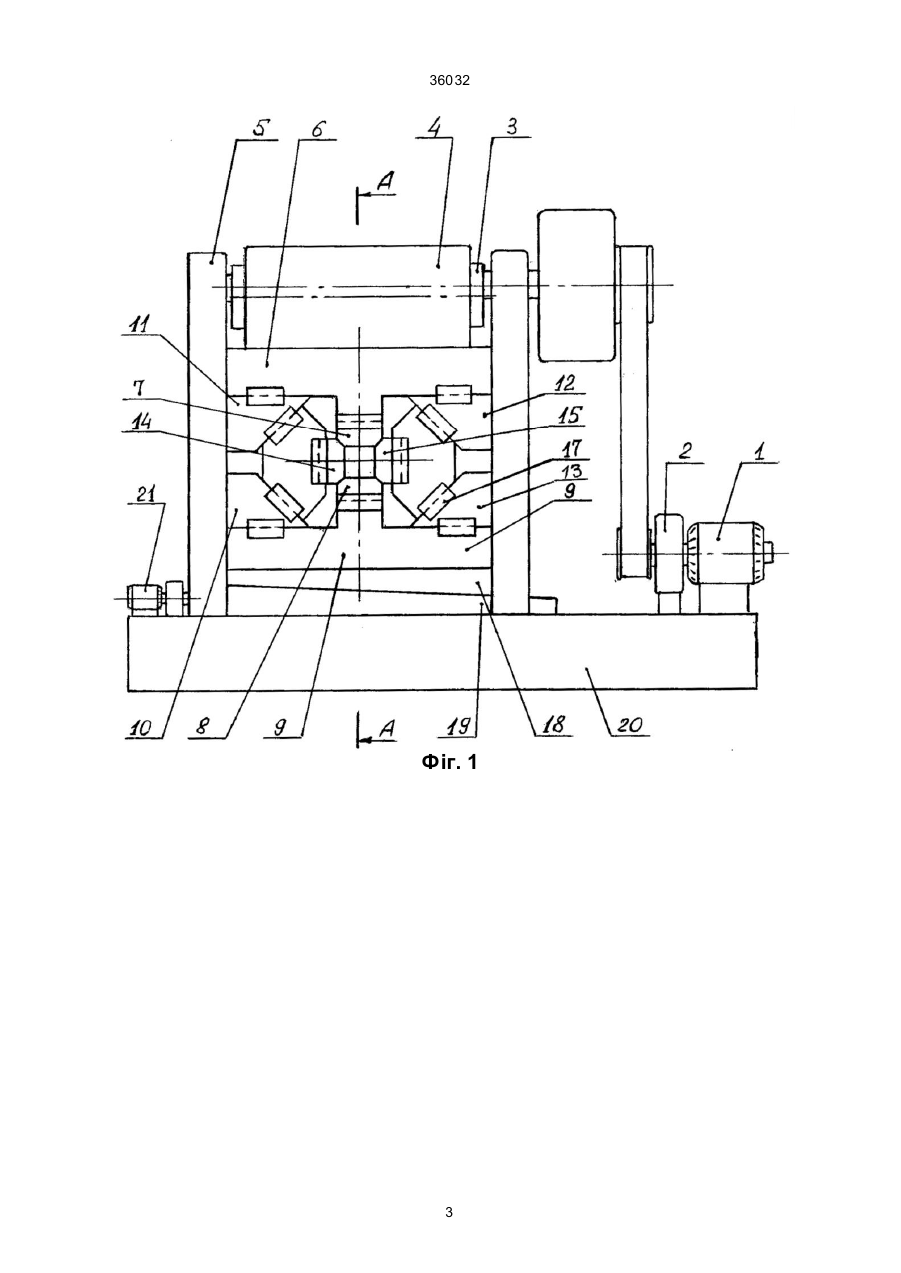
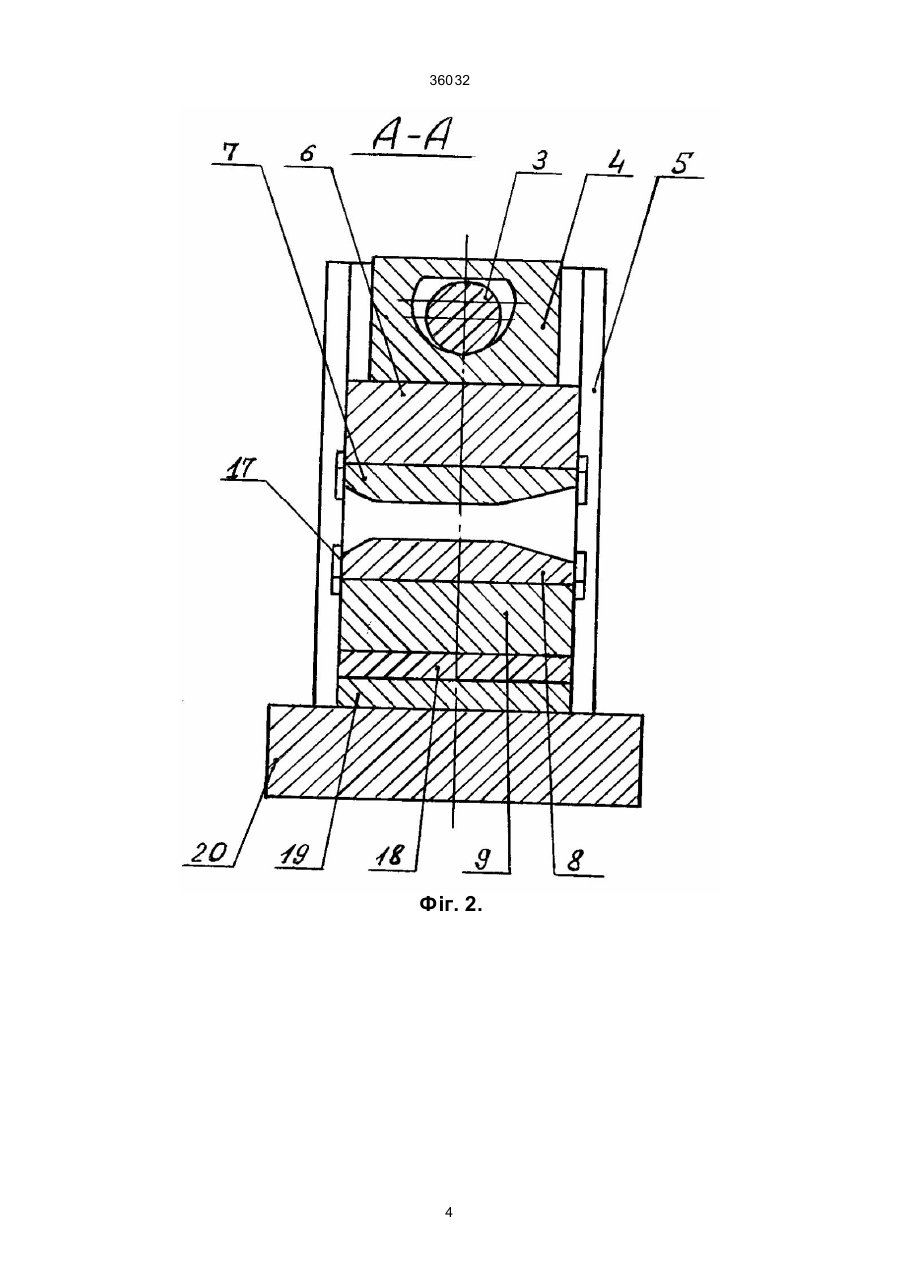
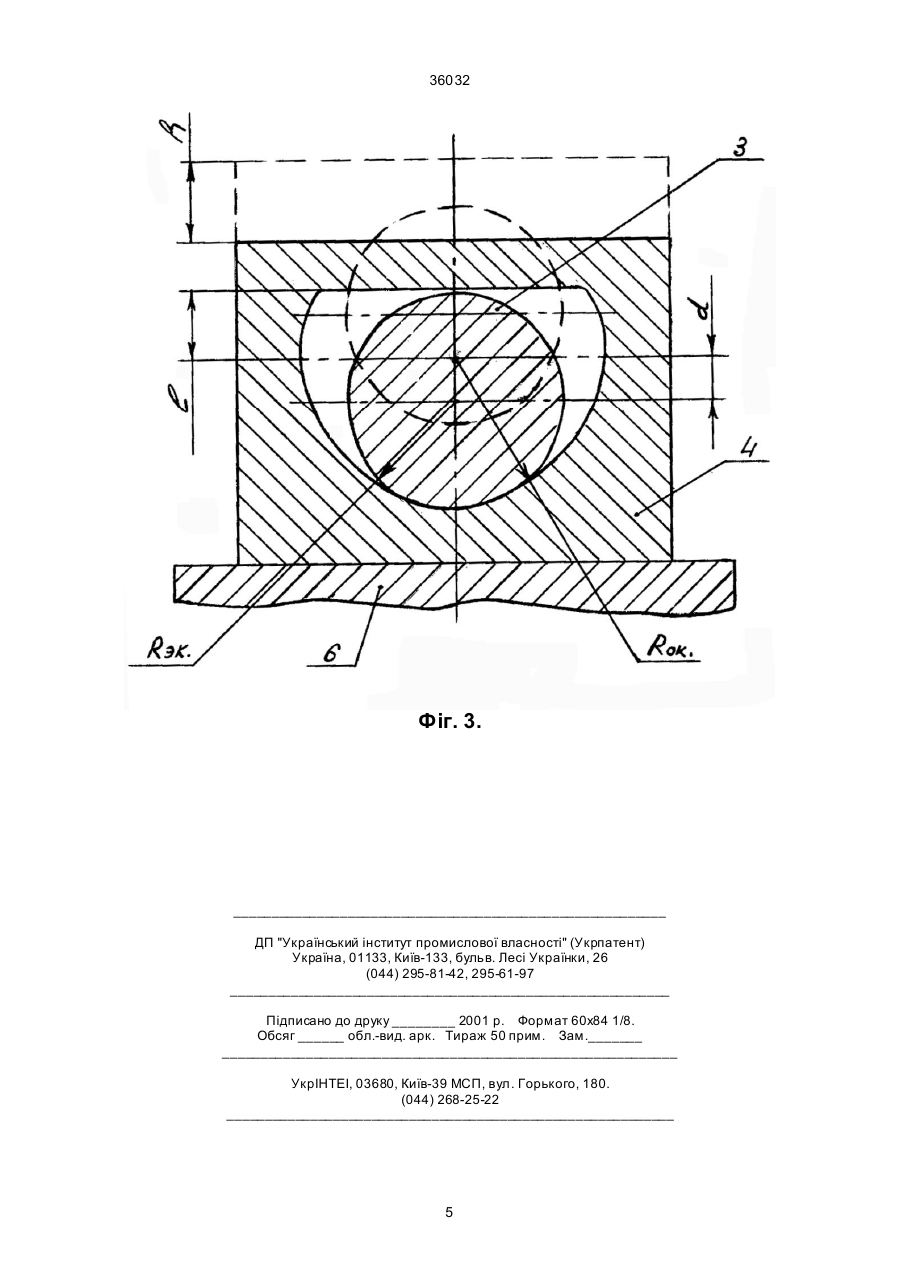
Радіально-кувальна машина, що складається з станини з направляючими, в якій розташовано чотирибойковий кувальний блок, який складається із двох тримачів верхнього і нижнього бойків із закріпленими бойками, чотирьох тримачів бокових бойків, прикріплених до тримачів верхнього і нижнього бойків, таких, що мають похилі поверхні у 36032 втулки має форму усіченого циліндра, в основі якого лежить сегмент, радіус якого Rок , причому Rок =Rек +d, де Rек - радіус ексцентрикового валу, d відстань центру симетрії ексцентрикового валу від центру його обертання, а відстань від центру сегменту до його сікучої хорди - l , причому l > Rек - d. На фіг. 1 зображена радіально-кувальна машина (вид спереду); на фіг. 2 - січення А-А, показане на фіг.1; на фіг. З - кінематична схема руху ексцентрикового валу та втулки з тримачем верхнього бойка. Ма шина складається з електродвигуна 1, пасової передачі та редук тору 2, ексцентрикового валу 3, втулки 4, станини з направляючими 5, тримача верхнього бойка 6, вер хнього бойка 7, нижнього бойка 8 з його тримачем 9, тримачів бокових бойків 10, 11, 12 і ІЗ, бокових бойків 14, 15 (фіг.1-3). Вер хній та нижній бойки 7, 8, а також тримачі бокових бойків 10-13 нерухомо закріплені за допомогою прижимів 16. Кріплення і рух бокових бойків 14, 15 по нахиленим поверхням тримачів бокових бойків 10-13 забезпечується направляючими планками 17. Ексцентриковий вал 3 розташований у втулці 4, яка нерухомо з'єднана з тримачем верхнього бойка, причому внутрішня порожнина втулки має форму усіченого циліндра, в основі якого лежить сегмент, радіус якого Rок , причому Rок = Rек + d, де Rек - радіус ексцентрикового валу; d - відстань центру симетрії ексцентрикового валу від центру його обертання, а відстань від центру сегменту втулки до його сікучої хорди - l, причому l > R ек - d. До тримача нижнього бойка 9 нерухомо прикріплений клин 18, котрий своєю нахиленою поверхнею зпрягається з нахиленою поверхнею рухомого клина 19. Опорною поверхнею рухомого клину 19 є плита 20 станини 5. До рухомого клину 19 прикріплений пристрій 21 для пересування клина по поверхні плити 20 (фіг.1, 2). Робота радіально-кувальної машини здійснюється таким чином. При вмиканні електродвигуна 1 крутильний момент з його валу передається через пасову передачу та редуктор 2 на ексцентриковий вал 3. Ексцентриковий вал 3, взаємодіючи з втулкою 4, здійснює пересування тримача верхнього бойка 6 разом з бойком 7 по направляючим 5. При русі верхнього тримача 6 вниз два тримача 11,12 також пересуваються вниз і своїми нахиленими поверхнями пересувають бокові бойки 14,15 назустріч один одному і вниз. Щоб забезпечити рух верхнього тримача 6 вниз ексцентриковий вал З взаємодіє з нижньою частиною втулки 4, яка має циліндричну форму. При прикладанні зусиль, щоб здійснити деформування металу така форма втулки поліпшує умови тертя сковзання (фіг. З). Під час руху тримача верхнього бойка 6 вверх за допомогою планок 15 забезпечують пересування бойків 14, 15 радіально і вверх, тобто бойки розводяться до попереднього стану (фіг.1, 2). Щоб забезпечити рух верхнього тримача 6 вверх, ексцентриковий вал 3 взаємодіє з верхньою частиною втулки 4, яка має плоску форму. При русі тримача 6 вверх великі зусилля не потрібні, тому тут достатня мінімальна площина взаємодії ексцентрикового валу 3 і втулки 4. Відстань пересування верхнього тримача 6 та втулки 4 має величину R, причому R = R ок - l При такому розташуванні ексцентрикового валу 3 у втулці 4 можна виключити з конструкції шатун, а також зменшити висоту направляючих 5. Таким чином, спрощується конструкція та зменшується її матеріаломісткість. Література: 1. Фомин Ю.А. Автоматизированные комплексы для горячей обработки металлов давлением. - М., 1988. - С.29-33 / Технология, оборудование, организация и экономика машиностроительного производства. Сер.З. Те хнология и оборудование кузнечно-штамповочного производства. Обзор информ. (ВНИИ ТЭ МР, вип.2). 2. Патент України № 21986, МКИ В 21 J 13/02, 1995 р. 2 36032 Фіг. 1 3 36032 Фіг. 2. 4 36032 Фіг. 3. _________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 5
ДивитисяДодаткова інформація
Назва патенту англійськоюRadial forging machine
Автори англійськоюLazorkin Viktor Andriovych, Lazorkin Viktor Andriiovych, Ternovyi Yurii Fedorovych, Artamonov Yurii Viktorovych, Bezkrovnyi Mykhailo Hryhorovych
Назва патенту російськоюРадиально-ковочная машина
Автори російськоюЛазоркин Виктор Андреевич, Терновый Юрий Федорович, Артамонов Юрий Викторович, Безкровный Михаил Григорьевич
МПК / Мітки
МПК: B21J 13/02
Мітки: машина, радіально-кувальна
Код посилання
<a href="https://ua.patents.su/5-36032-radialno-kuvalna-mashina.html" target="_blank" rel="follow" title="База патентів України">Радіально-кувальна машина</a>
Радіально-кувальна машина
Номер патенту: 35441
Опубліковано: 15.03.2001
Автори: Лазоркін Віктор Андрійович, Безкровний Михайло Григорович, Терновий Юрій Федорович, Артамонов Юрій Вікторович
МПК: B21K 1/00, B21J 7/00, B21J 9/00
Мітки: радіально-кувальна, машина
Формула / Реферат:
Радіально-кувальна машина, що складається із станини з направляючими, в якій розташовано чотирибойковий кувальний блок, який складається із двох тримачів верхнього 1 нижнього бойків із закріпленими бойками, чотирьох тримачів бокових бойків, прикріплених до тримачів верхнього і нижнього бойків, таких, що мають похилі поверхні у відповідності до похилих поверхонь двох бокових бойків, кінематично пов'язаних з ними, ексцентрикового валу з...
Радіально-кувальна установка
Номер патенту: 34104
Опубліковано: 15.02.2001
Автори: Лазоркін Віктор Андрійович, Чорний Богдан Петрович, Надемський Віктор Анатолійович, Смірнов Юрій Констянтинович
МПК: B21J 13/02
Мітки: радіально-кувальна, установка
Формула / Реферат:
1. Радіально-кувальна установка, що складається із станини з направляючими, в якій розміщено чотирьохбойковий кувальний блок, який складається із двох тримачів верхнього і нижнього бойків із закріпленими бойками, чотирьох тримачів бокових бойків, прикріплених до тримачів верхнього і нижнього бойків і таких, що мають похилі поверхні, які стикуються з похилими поверхнями двох бокових бойків, і кінематично пов'язаних з ними направляючими,...
Чотирьохбойковий кувальний пристрій
Номер патенту: 29183
Опубліковано: 16.10.2000
Автор: Лазоркін Віктор Андрійович
МПК: B21J 13/02
Мітки: пристрій, чотирьохбойковий, кувальний
Формула / Реферат:
1. Чотирьохбойковий кувальний пристрій, який складається із двох утримувачів верхнього і нижнього бойків з похилими поверхнями, кінематично пов'язанних з ними двох утримувачів бокових бойків з похилими поверхнями, які відповідають нахилу поверхонь верхнього і нижнього утримувачів і чотирьох бойків, які прікріпленні до відповідних утримувачів і мають заходні і калібруючі ділянки, який відрізняється тим, що похилі поверхні утримувачів бойків...
Спосіб кування металевих заготовок на обтискній кувальній машині,гідравлічна обтискна кувальна машина для його здійснення та насосна установка для гідравлічної обтискної кувальної машини
Номер патенту: 27251
Опубліковано: 15.08.2000
Автор: Дурі Антоніо
Мітки: спосіб, обтискної, машина, обтискна, установка, кувальна, гідравлічної, насосна, кування, машини, металевих, заготовок, кувальний, обтискній, здійснення, машині,гідравлічна, кувальної
Формула / Реферат:
(57) 1. Способ ковки металлических заготовок на обжимной ковочной машине, включающий деформацию заготовки бойками в двух режимах ковки, на одном из которых обжатие осуществляют с длинным ходом бойков при малой частоте их ходов, а на втором - с коротким ходом бойков при большой частоте их ходов, отличающийся тем, что длинный боковой ход бойков при малой частоте их ходов используют в режиме черновой обработки заготовки, а короткий ход бойков...
Інструмент для радіального кування
Номер патенту: 36421
Опубліковано: 16.04.2001
Автори: Лазоркін Віктор Андрійович, Безкровний Михайло Григорович, Артамонов Юрій Вікторович, Терновий Юрій Федорович
МПК: B21J 13/00
Мітки: радіального, кування, інструмент
Текст:
...кування в зібраному виді. На фіг. 2 - вид в плані на робочу поверхню бойка, у якого західні ділянки мають форму трапецій, а великі основи трапецій прилягають до калібруючої ділянки; на фіг. 3 - вид в плані на робочу поверхню бойка, у якого західні ділянки бойків мають форму трапецій, великі основи яких прилягають до контактуючих ділянок та дорівнюють ширині цих ділянок; на фіг. 4 - інструмент для радіального кування, у якого менші основи...
Попередній патент: Грунтообробний ротаційний робочий орган
Наступний патент: Спосіб утворення каркасних будівель із збірних елементів
Випадковий патент: Спосіб прогнозування прогресування фіброзно-кістозної хвороби молочних залоз в період вагітності