Магнітометр для контролю малих змін магнітного поля
Номер патенту: 38696
Опубліковано: 12.01.2009
Формула / Реферат
1. Магнітометр для контролю малих змін магнітного поля, що містить генератор, зв'язаний із вишукувальним елементом та конструктивно об'єднаний з чутливим датчиком, вихідний сигнал якого надходить у пристрій обробки, а джерело живлення підключене до усіх зазначених елементів, який відрізняється тим, що як автогенератор використаний напівпровідниковий генератор, що працює на частоті 30 МГц з магніточутливим сердечником високочастотного контуру на основі епітаксійної залізо-ітрій-гранатової плівки з некруговою діаграмою направленості та з переважним направленням максимальної чутливості, що лежить у площині плівки, для контролю просторового розподілу магнітного поля, магнітометр виконаний багатоканальним і має кратну двом, наприклад вісім, кількість ідентичних вимірювальних каналів із вісьмома датчиками магнітного поля (МП), а також пристрій обробки сигналів, виконаний у вигляді аналого-цифрового контролера, що підключений до персонального комп'ютера і з'єднаний з датчиками магнітного поля тонким коаксіальним кабелем.
2. Магнітометр за п. 1, який відрізняться тим, що має вісім датчиків порівняно малого розміру, наприклад 7×3,5×40 мм, на основі зазначеної вище залізо-ітрій-гранатової плівки та забезпечує можливість контролю змін розподілу МП у локальній зоні, наприклад, із розмірами 0,5×1×2 м.
3. Магнітометр за пп. 1, 2, який відрізняться тим, що він оснащений засобом візуалізації на моніторі комп'ютера положення джерела змін МП шляхом урахування кореляції даних від кожного датчика.
4. Магнітометр за пп. 1, 2, 3, який відрізняться тим, що для забезпечення швидкої готовності до роботи після включення живлення, а також для послаблення вимог до довгострокової стабільності частоти генераторів датчиків як вимірювальна величина вибрана різниця частот генераторів між першим та поточним значеннями, причому через кожні 50-100 актів вимірювання перше значення замінюється його поточним значенням.
5. Магнітометр за пп. 1, 2, 3, 4, який відрізняться тим, що він оснащений системою тестування чутливості датчиків, яка працює синхронно з тактами вимірювання.
Текст
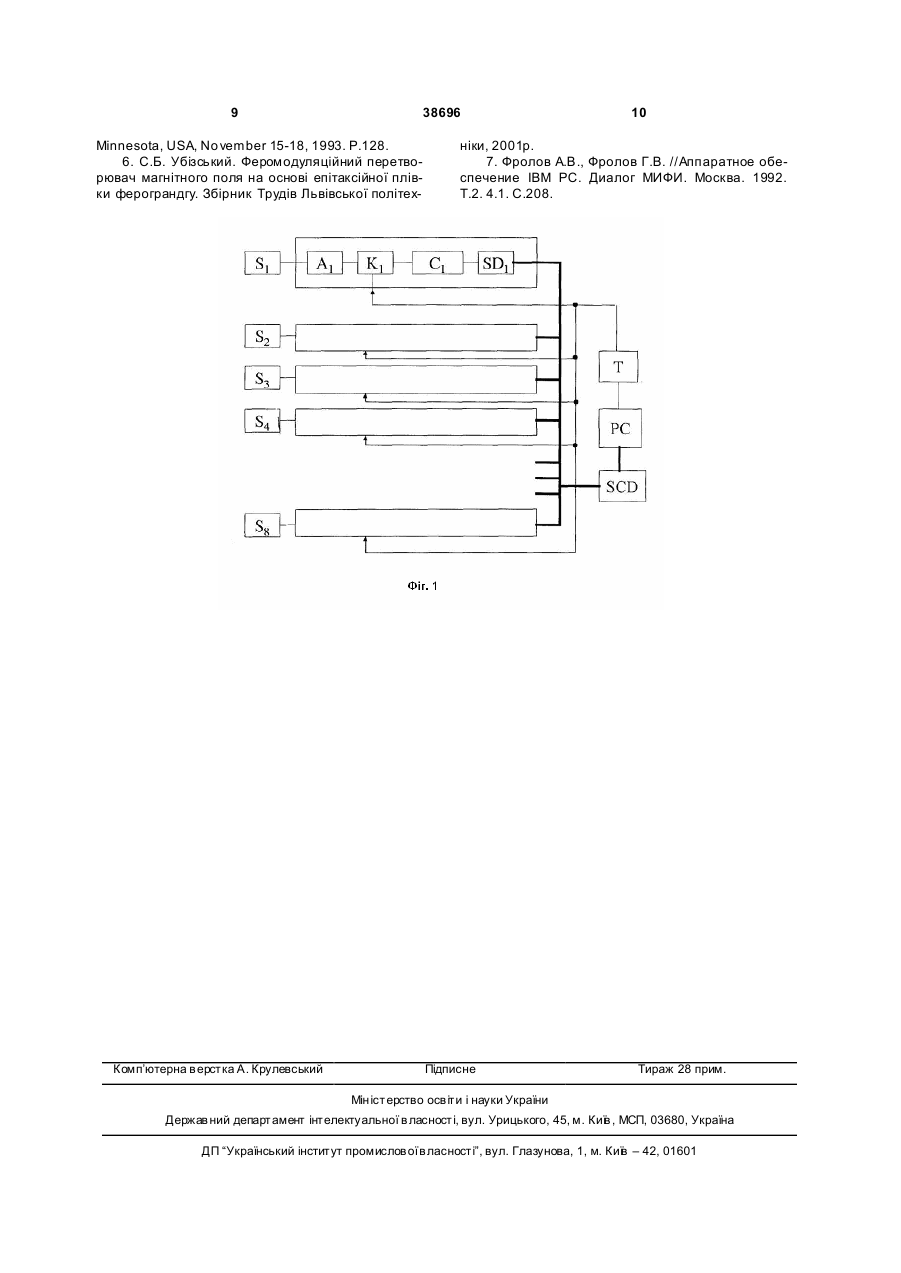
1. Магнітометр для контролю малих змін магнітного поля, що містить генератор, зв'язаний із вишукувальним елементом та конструктивно об'єднаний з чутливим датчиком, вихідний сигнал якого надходить у пристрій обробки, а джерело живлення підключене до усіх зазначених елементів, який відрізняється тим, що як автогенератор використаний напівпровідниковий генератор, що працює на частоті 30 МГц з магніточутливим сердечником високочастотного контур у на основі епітаксійної залізо-ітрій-гранатової плівки з некруговою діаграмою направленості та з переважним направленням максимальної чутливості, що лежить у площині плівки, для контролю просторового розподілу магнітного поля, магнітометр виконаний багатоканальним і має кратну двом, наприклад вісім, кількість ідентичних вимірювальних каналів із вісьмома датчиками магнітного поля (МП), а U 2 38696 1 3 38696 радіочастотних коливань. Сигнал датчика в залежності від його типу тим, чи іншим чином обробляється, перетворюється в аналоговий вихідний сигнал та порівнюється і значенням критичного рівня. Якщо вихідний сигнал перевищує критичний рівень, то формується сигнал для сигналізації системи виявлення. Датчики всіх відомих металошукачів створені на індукційному принципі. їх основу складають одна або декілька котушок, які часто називають приймальними котушками. Датчики відрізняються фізичним принципом взаємодії з металевим предметом, засобом перетворювання сигналів датчика у вихідний сигнал, видом сигналу (постійний, змінний, або імпульсний струм), а також конструкцією. Найбільше поширення отримали такі види датчиків, як вихорострумові, диференційно-мостові, а також трансформаторні. В залежності від конструкції металошукач або виявляє металевий предмет, або додатково дозволяє оцінювати його розміри та масу. Деякі конструкції мають можливість розрізнювати чорний та кольоровий види металу. Металошукачі розподіляються на переносні (мобільні) та стаціонарні. Перші використовуються для індивідуального огляду. Для масового огляду великого пасажиропотоку широко використовуються стаціонарні металошукачі. До основних технічних характеристик засобів контролю відносяться: чутли вість, вірогідність вірного виявлення, можливість виявляти дрібні предмети, необхідний час до початку роботи після включення живлення, перешкодозахищеність, умови експлуатації, номінальне значення напруги та потужність живлення. На сторінках 12-19 [1] є приклади технічної реалізації переносних металошукачів, а на сторінках 19-26 - стаціонарних засобів. Датчики стаціонарних металошукачів виконуються у вигляді замкнутої або П-образної рамки. Сучасні стаціонарні металошукачі що використовуються при огляді аеропортах, мають високу чутливість та широкий сервіс щодо настройки порогу чутливості, наприклад, від 0,5.Г метала і більше [2]. До недоліків таких систем слід віднести недостатній рівень функціональних можливостей. Справа в тому, що зниження чутливості веде до зниження надійності контролю, а при максимальної чутливості засіб реагує на всі електропровідні предмети, включно обгортки цукерок та шоколаду. Окрім цього, стаціонарні металошукачі діють інтегрально, що не дозволяє виявити конкретне місце знаходження металевого предмета в непрозорому об'єкті. У найкращому випадку виявляється тільки сторона об'єкту, з якої знаходиться металевий предмет [2]. Абсолютно надійна та зручна для пасажирів система контролю ще не розроблена. Феромодуляційні перетворювачі МП (ферозонди) для вимірювання малих МП низької частоти відомі з 1936 року. У 40-х роках ці прилади використовувались у аеромагнітній картографії, для розвідування нафти та інших корисних копалин, виявлення підводних човнів. В теперішній час вони звичайним чином використовуються, геофізичних 4 та космічних дослідженнях, сейсмології, морській навігації, геологічній магніторозвідці. Серед нових напрямків для технічних використань ферозондів слід відзначити "сліпу" посадку літаків та дефектоскопічний контроль металевих конструкцій. Теоретичні основи функціонування цих датчиків добре розроблені [3]. Основним недоліком традиційних ферозондових магнітометрів є так званий "магнітний шум", який стримує їх використання у медичній діагностиці (магнітна кардіографія, міографія, енцефалографія). Найбільшу чутливість та низький рівень шуму мають SQUID-магнітометри, але вони потребують глибокого охолодження і, є значно дорожчими. Відомо про застосування монокристалічних ферит-гранатових магнітних плівок для формування зображення розподілу МП [4]. Використання діелектричних моно кристальних активних середовищ на основі епітаксійних ферит-гранатових стр уктур з планарною намагніченістю у перетворювачах магнітного поля привабливо тим, що дає можливість кардинально знизити рівень власних шумів та збільшити чутливість. Одним з відомих засобів запобігти основного джерела "магнітного" шуму - баркгаузенівських стрибків при перемагнічуванні плівки, є використання циркулярного збудження доменів обертальним магнітним полем. При цьому вектор зовнішнього MП знаходиться у площині плівки, і тримає активне середовище у режимі насичення. Механізм перемагнічування таким чином полягає в когерентному обертанні вектора намагнічування за вектором зовнішнього поля. Перше застосування епітаксійних феритгранатових плівок у ферозондовому магнітометрі з циркулярним збудженням було запропоновано у роботі [5]. Автори знайшли можливість вимірювати усі три компоненти вектора МП при застосуванні тільки однієї вимірювальної котушки з осію, що лежить у площині плівки. Використання діелектрика як активного середовища дає можливість уникнути збудження вихрових стр умів, які є додатковим джерелом шуму та обмежником для збільшення частоти збудження ферозонда. Таким чином, ферозонд на основі епітаксійних ферит-гранатових плівок повинен мати значно більший робочий частотний діапазон та більшу чутливість. Теоретичний аналіз властивостей магнітометра - ферозонда з циркулярним збудженням був проведений у наступній роботі [6]. У роботі показана можливість застосування такого ферозонда для вимірювання просторових компонент МП, а також для вимірювання анізотропії епітаксійних ферит-гранатових плівок із кристалографічною орієнтацією (111) та віссю легкого намагнічування, що не лежить у площині плівки. В якості найближчого аналога, що співпадає з заявленою корисною моделлю за застосуванням та частково за наявністю подібних функціональних блоків, вибрана узагальнена структурна схема 5 38696 металошукача, що присутня на мал. 1.1, стор.4 роботи [1]. Загальними признаками найближчого аналога та заявленою корисною моделлю є наступні блоки (елементи): генератор, зв'язаний із вишукувальним елементом, що конструктивно об'єднаний з чутливим датчиком, вихідний сигнал якого надходить в пристрій обробки, а джерело стаціонарного або автономного живлення зв'язано з усіма зазначеними елементами. В основу корисної моделі поставлена задача удосконалення переносних та стаціонарних металошукачів переважно в якості електронного засобу огляду, наприклад авіапасажирів, першочергово для виявлення на тілі, в одязі, в ручній поклажі, а також у багажі холодної та вогнепальної зброї, стандартних вибухови х приладів та мобільних телефонів шляхом вибору високочутливих датчиків на основі залізо-ітрій гранатових (ЗІГ) плівок, використання одночасно декількох датчиків, наприклад, вісьмох, та цифровою системою обробки сигналів, що забезпечує значне збільшення робочої частоти та швидкодію системи, знижує кількість помилкових сигналів, виявляє конкретне місце знаходження магнітоактивного предмету в непрозорому об'єкті, забезпечує малі габарити та портативність при пристрою, при необхідності забезпечить оперативність його розміщення, а також значне зниження ціни. Поставлена задача вирішується в першу чергу шляхом використання в якості датчиків МП напівпровідникових автогенераторів, що працюють на частоті 30МГц. Чутливим до змін магнітного поля елементом є сердечник високочастотного контуру на основі епітаксійної ЗІГ плівки з характерним розміром магнітних доменів 15-20 мікрон та малою динамічною коерцитивністю. Плівка вирощена на монокристалічній підкладці із галій гадолінієвого гранату (ГГГ). Зміна магнітного поля викликає зміну магнітної проникності плівки, що, в свою чергу, викликає зміну частоти генератора. Робоча частота перетворюється контролером у цифровий код і реєструється та обробляється персональним комп'ютером. На основі такого удосконалення із застосуванням автогенератора, декількох датчиків, перетворенням змін МП в частоту та в цифровий код можуть бути збудовані як переносні, так і стаціонарні металошукачі. Причому застосування вісьмох, або більшого числа (n*8, де n=1, 2, 3, 4...) датчиків дозволяє виявляти конкретне місце знаходження металевого предмета у закритому від зору просторі, відтворюючи картину на моніторі комп'ютера. Зазначена задача по розробці удосконаленої конструкції металошукача вирішується тим, що магнітометр для контролю малих змін магнітного поля містить автогенератор, зв'язаний з вишукувальним елементом, який конструктивно об'єднаний з чутливим датчиком, вихідний сигнал якого надходить у пристрій обробки, а джерело стаціонарного або автономного живлення зв'язано з усіма зазначеними елементами, згідно корисної моделі, в якості автогенератора використаний напівпровідниковий генератор, що працює на частоті 30МГц, у якості магніточутливого сердечника 6 високочастотного контуру використана епітаксійна плівка на основі ЗІГ з некруговою діаграмою направленості та з переважним направленням максимальної чутливості, що лежить у площині плівки у разі малих та однорідних магнітних полів; для контролю просторового розподілу МП магнітометр виконаний багатоканальним і має кратну дво х, наприклад, вісім, кількість ідентичних вимірювальних каналів із вісьмома датчиками МП, пристрій обробки сигналів виконаний у вигляді аналогоцифрового контролера, що з'єднується з персональним комп'ютером, а також з датчиками МП тонким коаксіальним кабелем. Конкретна відмінність полягає в тому, що магнітометр забезпечений засобом для візуалізації на моніторі комп'ютера положення джерела змін МП, шляхом урахування кореляції даних від кожного датчика. Конкретно магнітометр відрізняється тим, що він має вісім датчиків порівняно малого розміру наприклад, 7×3,5×40мм, на основі зазначеної вище плівки ЗІГ та забезпечує можливість контролю змін розподілу МП у локальній зоні, наприклад, із розмірами 0,5×1×2м. Конкретна відмінність полягає в тому, що для роботи магнітометра не потрібна довгострокова стабільність частоти генераторів датчиків, що забезпечує швидку готовність до роботи після включення живлення, для чого в якості вимірювальної величини вибрана різність частот генераторів між першим та поточним значенням, причому через кожні 50-100 актів вимірювання перше значення замінюється його поточним значенням. Конкретна відмінність полягає в тому, що магнітометр забезпечений системою тестування чутливості датчиків, яка працює синхронно з тактами вимірювання. Конкретна відмінність полягає в тому, що магнітометр реєструє тільки зміни розподілу МП і нечутливий до начального розподілу МП, тому він здатний працювати з максимальною чутливістю в області простору, де можуть розміщуватися нерухомі магнітні предмети. Конкретна відмінність полягає в тому, що в магнітометрі за допомогою електронних лічильників здійснюється пряме і в повному обсязі перетворення частот генераторів у цифровий код, що дозволяє не використовувати для регулювання динамічного діапазону (чутливості) аналогових пристроїв (мостів), які вносять додаткову нестабільність та потребують налагодження. Причинно-наслідковий зв'язок між відмінними ознаками магнітометра та досяжними технікоекономічними перевагами полягає в наступній особливості. Значне розширення можливостей існуючих стаціонарних металошукачів можна досягнути якщо доповнити їх засобом, що реагує тільки на зміни розподілення МП. При цьому будуть відрізнені три класи предметів: електропровідні та немагнітні (вироби із благородних та кольорових металів), вироби із чорних металів (ножі, ножиці...), а також магнітоактивні, але не електропровідні (радіо компоненти, мобільні телефони...). Для перевірки цієї можливості нами зроблений пристрій, що працює за принципом багатоканаль 7 38696 ного магнітометра. Він є достатньо простий у реалізації та забезпечує автоматичний контроль змін розподілення МП в обмеженому просторі (наприклад, 1*2*0,5м) із характерним часовим масштабом 0,5-5 секунд. Реєстрація даних та управління роботою пристрою здійснюється персональним комп'ютером через LPT порт. На фігурі 1 приведена функціональна схема 8канального магнітометра. Функціональні блоки мають наступні позначення: S1-S8 - датчики магнітного поля; А1-А8 - аналогові підсилювачі напруги сигналу 30МГц; К1-К8 - електронні ключі; С1-С8 - лічильники імпульсів; SD1-SD8 - селектори даних; SCD - селектор каналів даних; Т - таймер; PC - персональний комп'ютер. Пристрій має вісім датчиків МП, контролер і персональний комп'ютер. Датчики МП з'єднані з контролером тонким коаксіальним кабелем довільної довжини, наприклад, 10 метрів. В якості датчиків МП використані ВЧ автогенератори, що працюють на частоті 30МГц. Чутливим елементом є епітаксійна плівка на основі ЗІГ, що вирощена на монокристалічній підкладці з ГГГ. Плівка служить магнітним сердечником ВЧ контуру. Зміна МП викликає зміну магнітної проникності плівки що, у свою чергу, викликає зміну частоти генератора. Зміна частоти контролюється PC. Усі вісім каналів є ідентичними. Процедура роботи пристрою у великій мірі залежить від специфіки датчиків. ЗІГ плівки, що застосовані в якості чутливого елемента, мають доменну стр уктур у з характерним розміром доменів 15-20μm. Зміна магнітної проникності плівки за рахунок дії МП залежить в основному від динамічної коерцитивності доменної структури. Оскільки епітаксійні плівки мають дефекти, то після декількох циклів змін МП здійснюється зміна конфігурації магнітних доменів, що у кінцевому рахунку веде до флуктуацій частоти генератору. В якості вимірювального параметра що накопичується і обробляється PC зручно вибрати різність частот генератора між першим та поточним значеннями. Пам'ять про стартові частоти у зв'язку з відсутністю довгострокової стабільності генераторів не несе корисної інформації. Тому через кожні 50-100 циклів вимірювань стартова частота замінюється її поточним значенням. Це дозволяє знизити вимоги до довгострокової стабільності частоти генераторів і не використовувати, наприклад, стабілізацію температури датчиків. Датчики мають невеликі розміри 7×3.5×40мм і розміщуються рівномірно по двох довгих сторонах периметру контрольованої області. Чутливість датчиків характеризує мінімальна величина варіації магнітної індукції 10-7Т. Датчики характеризуються не круговою діаграмою направленості. Для малих змін однорідного МП направлення з максимальною чутливістю знаходиться у площині плівки. Мінімальну чутливість, меншу у 6 разів, плівка має у напрямку, що нормальне до площини плівки. Спеціально розроблена комп'ютерна програма 8 враховує кореляцію сигналів датчиків і дозволяє відтворювати положення магнітного джерела на екрані монітора. Зручний для контролю часовий масштаб варіації МП 0,5-5 секунд дозволяє реєструвати переміщення магнітного джерела через кордон контрольованої зони із швидкістю 0,1-1м/с. Пристрій може мати автономне джерело живлення, не потребує спеціального налагодження і тому може бути мобільним. Зібраний нами макет пристрою добре реагує на переміщення мобільних телефонів, феритових стержнів від радіоприймачів та навіть малих предметів з чорних металів (крупні голки, ножиці) якщо вони передчасно не розмагнічені. Для зв'язку контролера з PC через інтерфейс LPT порту були вра ховані рекомендації роботи: Фролов А.В., Фролов Г.В. //Аппаратное обеспечение IBM PC. Диалог МИФИ. Москва. 1992. Т.2. 4.1. С.208. [7]. Сигнал від генератора по коаксіальному кабелю надходить на аналоговий попередній підсилювач, що забезпечує такий рівень сигналу, який є достатнім для роботи цифрових мікросхем. Процедура роботи контролера задається PC. ВЧ генератори працюють у безперервному, режимі. Решта пристрою працює кроками. Перший крок зв'язаний з дозволом рахування періодів коливань кожного генератору відповідними лічильниками (С1-С8). Початок і кінець рахування забезпечують електронні ключі (К1-К8), що виконані на звичайних логічних елементах 2І-НІ. Початок рахування забезпечується, якщо на другий вхід ци х елементів подається сигнал логічної одиниці та закінчується при подачі сигналу логічного нуля. Сигнал логічної одиниці формується PC, а появу логічного нуля забезпечує таймер пристрою. Наступні кроки управління зв'язані з послідовним зчитуванням даних з кожного лічильника через LPT порт, який за один крок може передати в комп'ютер пів байту інформації по чотирьох проводах [7]. Уся процедура зчитування потребує 48 кроків. Далі інформація обробляється, а на контролер подається команда що присвоює даним лічильників нульове значення, після цього пристрій здатний до наступного акту вимірювань. З урахуванням поданого матеріалу заявлена корисна модель відповідає нормативним вимогам щодо новизни та придатності до промислового виробництва. Література: 1. И.И. Чадович. Электронные средства досмотра. Учебное пособие. Санкт-Петербург, 2001, Министерство образования РФ, СанктПетербургский университет аэрокосмического приборостроения. 2. http//www.metalloiskateli.ru. 3. Афанасьев Ю.В. Феррозондовые приборы, Ленинград, 1986г., 188с. 4. Koblischka M.R., Wijngaarden R.I. // Supercond. Sci. Technol. 1995, N8, 199с. 5. Perlov A.Ya., Voronko A.I., Vetoshko P.M., Volkovo y V.B. Three component magnetic field measurement using the cubic anisotropy in (111) YIG films. The 38-th Annual Conference on Magnetism and Magnetic Materials (MMM-93), Minneapolis, 9 38696 Minnesota, USA, No vember 15-18, 1993. P.128. 6. С.Б. Убізський. Феромодуляційний перетворювач магнітного поля на основі епітаксійної плівки ферограндгу. Збірник Трудів Львівської політех Комп’ютерна в ерстка А. Крулевський 10 ніки, 2001р. 7. Фролов А.В., Фролов Г.В. //Аппаратное обеспечение IBM PC. Диалог МИФИ. Москва. 1992. Т.2. 4.1. С.208. Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMagnetometer for control of small changes of magnetic field
Автори англійськоюMezin Mykola Ivanovych, Nikolaienko Yurii Makarovych
Назва патенту російськоюМагнитометр для контроля малых изменений магнитного поля
Автори російськоюМезин Николай Иванович, Николаенко Юрий Макарович
МПК / Мітки
МПК: G01R 33/02, G01R 33/00, H01F 10/00, G01V 3/00
Мітки: магнітометр, змін, малих, поля, магнітного, контролю
Код посилання
<a href="https://ua.patents.su/5-38696-magnitometr-dlya-kontrolyu-malikh-zmin-magnitnogo-polya.html" target="_blank" rel="follow" title="База патентів України">Магнітометр для контролю малих змін магнітного поля</a>
Магнітометр третього порядку для вимірювання осьового октупольного моменту джерел зовнішньго магнітного поля
Номер патенту: 43185
Опубліковано: 15.11.2001
Автор: Дегтярьов Віталій Валентинович
МПК: G01R 33/02, G01V 3/08
Мітки: порядку, вимірювання, третього, магнітного, моменту, магнітометр, октупольного, зовнішньго, джерел, поля, осьового
Формула / Реферат:
Магнітометр третього порядку для вимірювання осьового октупольного моменту джерел зовнішнього магнітного поля, що містить магніточутливі датчики, які розташовані навколо вимірюваного джерела поля, який відрізняється тим, що він виконаний з дванадцяти датчиків, з яких вісім рівномірно розташовані на двох колах радіуса R, осі яких співпадають, а їх центри віддалені від центру вимірювального пристрою на координату ± z, яка пов'язана з радіусом R...
Спосіб вимірювання напруженості магнітного поля і магнітометр для його здійснення
Номер патенту: 21185
Опубліковано: 28.02.2000
Автор: Скляр Ростислав Віталійович
МПК: G01R 33/02
Мітки: магнітометр, вимірювання, здійснення, напруженості, магнітного, поля, спосіб
Формула / Реферат:
1. Спосіб вимірювання напруженості магнітного поля, згідно з яким магнітне поле перетворюють в електричну напругу за допомогою приймальної котушки і обробляють отриманий сигнал, який відрізняється тим, що перетворення напруженості магнітного поля здійснюють при температурі оточуючого середовища, а попередню обробку сигналу проводять в умовах надпровідності. 2. Магнітометр для вимірювання напруженості магнітного поля, котрий...
Пристрій для контролю рівня напруженості квадрупольної постійної складової зовнішнього магнітного поля
Номер патенту: 36377
Опубліковано: 16.04.2001
Автор: Дегтярьов Віталій Валентинович
МПК: G01R 33/02
Мітки: напруженості, рівня, магнітного, постійної, поля, квадрупольної, зовнішнього, контролю, пристрій, складової
Текст:
...ö ç ÷ 2 çR LZ ÷ è ø 2é 2ù ê1 - 7 æ k Z ö ç ÷ ê 4 ç R LZ ÷ è ø ë ú × 100%, ú û де kZ=z0/LZ£1/2, z0 - координата ексцентричності магнітного диполя за координатним напрямком Z, що створює мультипольні магнітні моменти g20 , g40 , g44 i g64 ; LZ - габаритний розмір джерела ЗМП за координатним напрямком Z. З аналізу графічної залежності d20=f(R/L), що зображена на фіг. 2, випливає, що при вимірюванні осьового квадрупольного магнітного моменту...
Модель магнітного поля землі
Номер патенту: 1615
Опубліковано: 15.01.2003
Автори: Жук Юрій Олексійович, Сухомлинський Сергій Васильович, Биков Валерій Юхимович, Стороженко Анатолій Олександрович
МПК: G09B 23/18
Мітки: поля, магнітного, модель, землі
Формула / Реферат:
Модель магнітного поля Землі, яка включає порожнистий географічний глобус поверхні Землі, яка відрізняється тим, що всередині глобуса вздовж осі обертання розташований електромагніт.
Вимірювач магнітного поля і температури
Номер патенту: 28393
Опубліковано: 16.10.2000
Автори: Ющук Степан Іванович, Варшава Славомир Степанович, Байцар Роман Іванович, Прохорович Анатолій Вікторович, Венгер Євген Федорович
МПК: H01L 43/08, G01K 7/32
Мітки: вимірювач, поля, температури, магнітного
Формула / Реферат:
Вимірювач магнітного поля і температури, що містить датчик магнітного поля з напівпровідникового монокристала InSb, терморезистор з напівпровідникового ниткоподібного монокристала, розташовані на підкладці, який відрізняється тим, що датчик магнітного поля виконано у вигляді магніторезистора з питомим опором матеріалу 0,01 Ом.см, терморезистор - з твердого розчину Si-Ge<Zn> з питомим опором 0,6-1,0 Oм.cм, а підкладку - з...
Попередній патент: Спосіб створення вакууму в промислових апаратах
Наступний патент: Спосіб хірургічного лікування деформації вушної раковини
Випадковий патент: Машина транспортерного типу для подрібнення насінників гарбуза