Основов’язальна машина
Номер патенту: 39814
Опубліковано: 15.06.2001
Автори: Семенюк Микола Федорович, Смутко Світлана Валеріївна, Параска Георгій Борисович


Формула / Реферат
1. Основов'язальна машина, яка включає механізми голок, движків, кінематично зв’язаних з головним валом машини, вушковин та платин, яка відрізняється тим, що приводи петлетвірних органів виконані у вигляді однотипних зубчато-важільних планетарних механізмів.
2. Основов'язальна машина по п. 1, яка відрізняється тим, що сателіти приводів петлетвірних органів виконані з різними радіусами початкових кіл.
3. Основов'язальна машина по п. 1. яка відрізняється тим, що зубчате колесо приводів петлетвірних органів виконано з можливістю зміни радіуса початкового кола та зміни місця осі обертання відносно осі обертання водила.
4. Основов'язальна машина по п. 1. яка відрізняється тим, що з'єднання важеля з зубчатим колесом в приводах петлетвірних органів виконане з можливістю розташування в будь-якій точці торцевої поверхні зубчатого колеса.
Текст
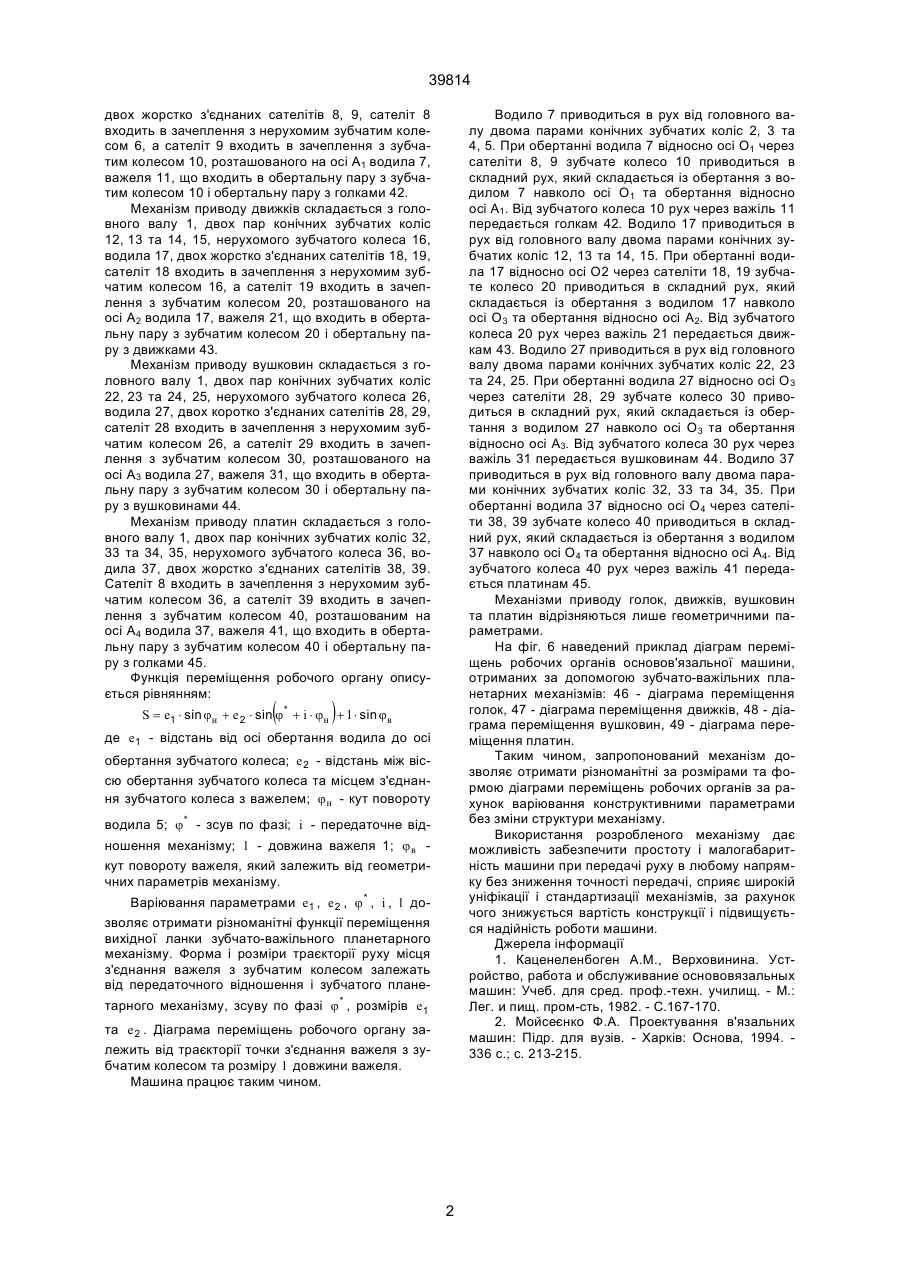
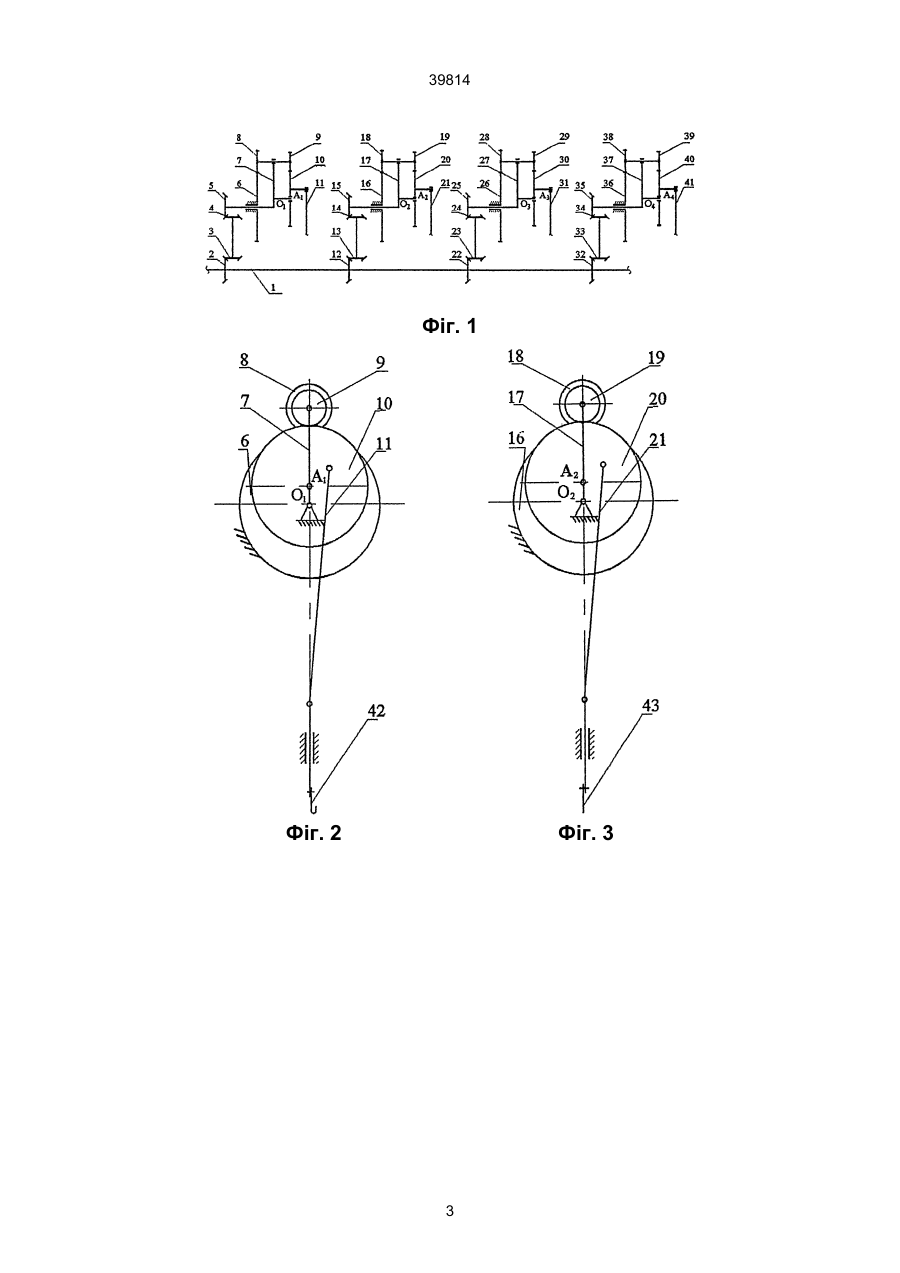
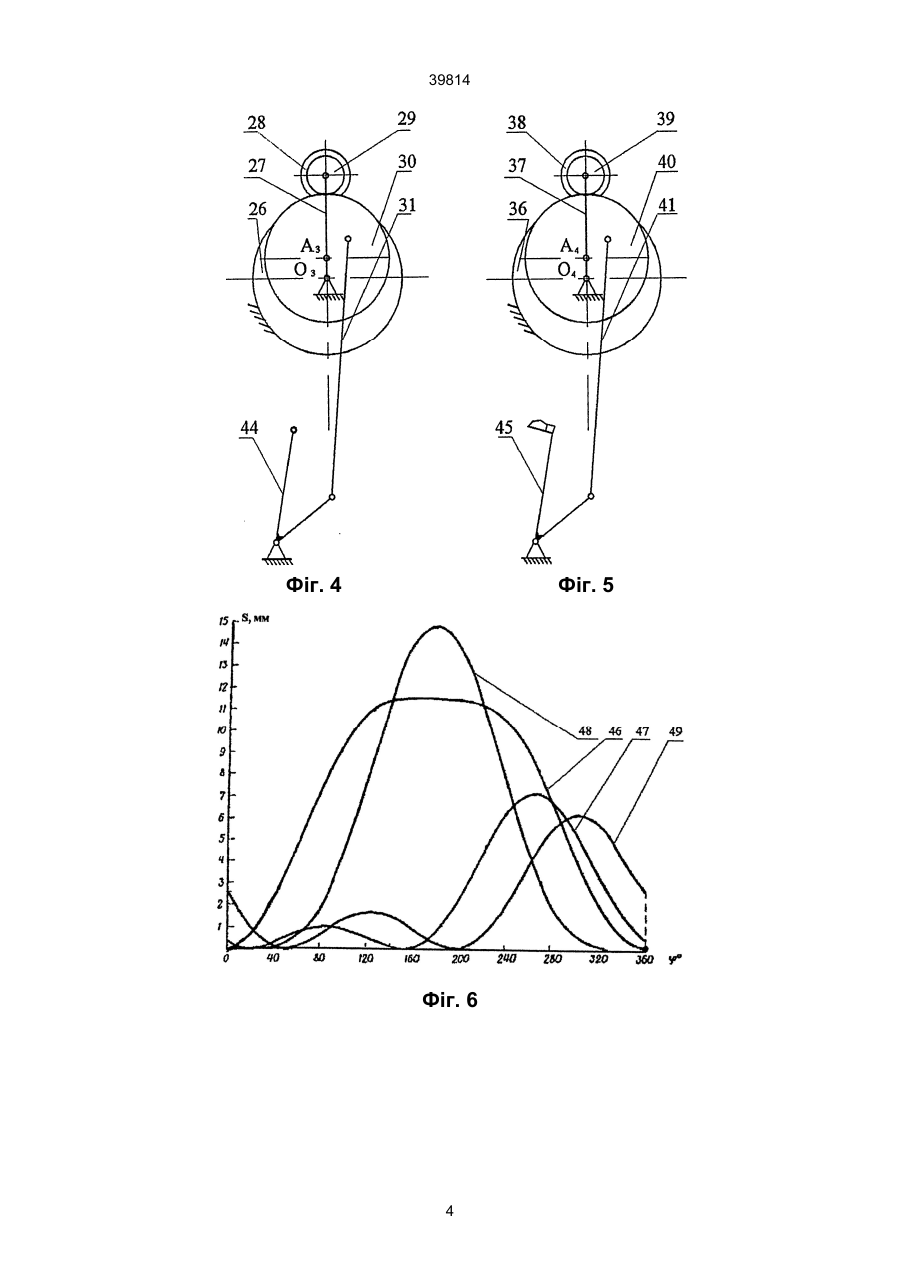
1. Основов'язальна машина, яка включає механізми голок, движків, вушковин та платин, кінематично зв'язаних з головним валом машини, яка відрізняється тим, що приводи петлетвірних органів виконані у вигляді однотипних зубчатоважільних планетарних механізмів. 39814 Водило 7 приводиться в рух від головного валу двома парами конічних зубчатих коліс 2, 3 та 4, 5. При обертанні водила 7 відносно осі О1 через сателіти 8, 9 зубчате колесо 10 приводиться в складний рух, який складається із обертання з водилом 7 навколо осі О1 та обертання відносно осі А1. Від зубчатого колеса 10 рух через важіль 11 передається голкам 42. Водило 17 приводиться в рух від головного валу двома парами конічних зубчатих коліс 12, 13 та 14, 15. При обертанні водила 17 відносно осі О2 через сателіти 18, 19 зубчате колесо 20 приводиться в складний рух, який складається із обертання з водилом 17 навколо осі О3 та обертання відносно осі А2. Від зубчатого колеса 20 рух через важіль 21 передається движкам 43. Водило 27 приводиться в рух від головного валу двома парами конічних зубчатих коліс 22, 23 та 24, 25. При обертанні водила 27 відносно осі О 3 через сателіти 28, 29 зубчате колесо 30 приводиться в складний рух, який складається із обертання з водилом 27 навколо осі О3 та обертання відносно осі А3. Від зубчатого колеса 30 рух через важіль 31 передається вушковинам 44. Водило 37 приводиться в рух від головного валу двома парами конічних зубчатих коліс 32, 33 та 34, 35. При обертанні водила 37 відносно осі О4 через сателіти 38, 39 зубчате колесо 40 приводиться в складний рух, який складається із обертання з водилом 37 навколо осі О4 та обертання відносно осі А4. Від зубчатого колеса 40 рух через важіль 41 передається платинам 45. Механізми приводу голок, движків, вушковин та платин відрізняються лише геометричними параметрами. На фіг. 6 наведений приклад діаграм переміщень робочих органів основов'язальної машини, отриманих за допомогою зубчато-важільних планетарних механізмів: 46 - діаграма переміщення голок, 47 - діаграма переміщення движків, 48 - діаграма переміщення вушковин, 49 - діаграма переміщення платин. Таким чином, запропонований механізм дозволяє отримати різноманітні за розмірами та формою діаграми переміщень робочих органів за рахунок варіювання конструктивними параметрами без зміни структури механізму. Використання розробленого механізму дає можливість забезпечити простоту і малогабаритність машини при передачі руху в любому напрямку без зниження точності передачі, сприяє широкій уніфікації і стандартизації механізмів, за рахунок чого знижується вартість конструкції і підвищується надійність роботи машини. Джерела інформації 1. Каценеленбоген А.М., Верховинина. Устройство, работа и обслуживание основовязальных машин: Учеб. для сред. проф.-техн. училищ. - М.: Лег. и пищ. пром-сть, 1982. - С.167-170. 2. Мойсеєнко Ф.А. Проектування в'язальних машин: Підр. для вузів. - Xарків: Основа, 1994. 336 с.; с. 213-215. двох жорстко з'єднаних сателітів 8, 9, сателіт 8 входить в зачеплення з нерухомим зубчатим колесом 6, а сателіт 9 входить в зачеплення з зубчатим колесом 10, розташованого на осі А1 водила 7, важеля 11, що входить в обертальну пару з зубчатим колесом 10 і обертальну пару з голками 42. Механізм приводу движків складається з головного валу 1, двох пар конічних зубчатих коліс 12, 13 та 14, 15, нерухомого зубчатого колеса 16, водила 17, двох жорстко з'єднаних сателітів 18, 19, сателіт 18 входить в зачеплення з нерухомим зубчатим колесом 16, а сателіт 19 входить в зачеплення з зубчатим колесом 20, розташованого на осі А2 водила 17, важеля 21, що входить в обертальну пару з зубчатим колесом 20 і обертальну пару з движками 43. Механізм приводу вушковин складається з головного валу 1, двох пар конічних зубчатих коліс 22, 23 та 24, 25, нерухомого зубчатого колеса 26, водила 27, двох коротко з'єднаних сателітів 28, 29, сателіт 28 входить в зачеплення з нерухомим зубчатим колесом 26, а сателіт 29 входить в зачеплення з зубчатим колесом 30, розташованого на осі А3 водила 27, важеля 31, що входить в обертальну пару з зубчатим колесом 30 і обертальну пару з вушковинами 44. Механізм приводу платин складається з головного валу 1, двох пар конічних зубчатих коліс 32, 33 та 34, 35, нерухомого зубчатого колеса 36, водила 37, двох жорстко з'єднаних сателітів 38, 39. Сателіт 8 входить в зачеплення з нерухомим зубчатим колесом 36, а сателіт 39 входить в зачеплення з зубчатим колесом 40, розташованим на осі А4 водила 37, важеля 41, що входить в обертальну пapу з зубчатим колесом 40 і обертальну пару з голками 45. Функція переміщення робочого органу описується рівнянням: ( ) S = e1 × sin jн + e 2 × sin j* + i × jн + l × sin jв де e1 - відстань від осі обертання водила до осі обертання зубчатого колеса; e 2 - відстань між віссю обертання зубчатого колеса та місцем з'єднання зубчатого колеса з важелем; j н - кут повороту водила 5; j * - зсув по фазі; i - передаточне відношення механізму; l - довжина важеля 1; j в кут повороту важеля, який залежить від геометричних параметрів механізму. Варіювання параметрами e1 , e 2 , j * , i , l дозволяє отримати різноманітні функції переміщення вихідної ланки зубчато-важільного планетарного механізму. Форма і розміри траєкторії руху місця з'єднання важеля з зубчатим колесом залежать від передаточного відношення і зубчатого планетарного механізму, зсуву по фазі j * , розмірів e1 та e 2 . Діаграма переміщень робочого органу залежить від траєкторії точки з'єднання важеля з зубчатим колесом та розміру l довжини важеля. Машина працює таким чином. 2 39814 Фіг. 1 Фіг. 2 Фіг. 3 3 39814 Фіг. 4 Фіг. 5 Фіг. 6 4 39814 __________________________________________________________ ДП “Український інститут промислової власності (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид.арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 5
ДивитисяДодаткова інформація
Назва патенту англійськоюWarp-knitting machine
Автори англійськоюSmutko Svitlana Valeriivna, Paraska Georgii Borysovych, Semeniuk Mykola Fedorovych
Назва патенту російськоюОснововязальная машина
Автори російськоюСмутко Светлана Валерьевна, Параска Георгий Борисович, Семенюк Николай Федорович
МПК / Мітки
МПК: D04B 23/00, D04B 27/00
Мітки: машина, основов'язальна
Код посилання
<a href="https://ua.patents.su/5-39814-osnovovyazalna-mashina.html" target="_blank" rel="follow" title="База патентів України">Основов’язальна машина</a>
Зубчато-важільний планетарний механізм
Номер патенту: 30308
Опубліковано: 15.11.2000
Автори: Смутко Світлана Валеріївна, Параска Георгій Борисович
МПК: F16H 1/28, F16H 37/00
Мітки: планетарний, зубчато-важільний, механізм
Формула / Реферат:
Зубчатоважільний планетарний механізм, який містить нерухоме зубчате колесо, водило, два жорстко з'єднаних сателіти, встановлених на водилі, зубчате колесо з віссю обертання, розташованою в водилі, важіль, з'єднаний з зубчатим колесом, який відрізняється тим, що сателіти виконані з різними радіусами початкових кіл, зубчате колесо виконано з можливістю зміни радіуса початкового кола та зміни місця осі обертання відносно осі обертання водила, а...
Планетарна передача
Номер патенту: 35697
Опубліковано: 16.04.2001
Автор: Бичук Анатолій Володимирович
МПК: F16H 1/36
Мітки: передача, планетарна
Формула / Реферат:
1. Планетарна передача, що складається з корпуса, ведучого і веденого валів, закріпленого на ведучому валі сонячного колеса, закріпленого на веденому валі водила з установленою на ньому віссю, на першому кінці якої закріплено сателіт, що зачіплюється зубами з сонячним колесом, яка відрізняється тим, що на другому кінці установленої на водилі осі закріплена зірочка-сателіт, яка за допомогою ланцюга зачіплюється з сонячною зірочкою, нерухомо...
Крутильна машина

Номер патенту: 32594
Опубліковано: 15.02.2001
Автор: Сидоренко Федір Дмитрович
МПК: H01B 13/02
Текст:
...колеса дорівнює діаметру початкового кола сателіта, щоб забезпечити підвищення продуктивності і спрощення конструкції. В сукупності суттєві ознаки дозволяють знизити масу машини, тому що намотувальна котушка винесена за меж і машини і мож е мати будь- які розміри t місткість, котрі обумовлюються технологічним процесом, що спрощує конструкцію маши' ни. Так як рамка не охоплює тепер намотувальну котушку, то вона становиться легкою і менш...
Кривошипно – шатунний механізм поршневої машини
Номер патенту: 643
Опубліковано: 16.10.2000
Автор: Підгорний Олександр Сергійович
МПК: F01B 9/04
Мітки: машини, шатунний, кривошипно, механізм, поршневої
Формула / Реферат:
Кривошипно-шатунний механізм поршневої машини, який включає корпус з циліндром, поршень, розташований у циліндрі, жорстко зв'язану з корпусом циліндричну шестерню з внутрішнім зубчатим вінцем, перший кривошипний вал, встановлений в корпусі, першу шестерню-сателіт з зовнішнім зубчатим вінцем, встановлену з можливістю зачеплення з внутрішнім зубчатим вінцем циліндричної шестерні і сполучену шарнірно з першим кривошипним валом, а також перший...
Машина для вібропланетарної обробки

Номер патенту: 32665
Опубліковано: 15.02.2001
Автори: Паламарчук Ігор Павлович, Липовий Ігор Григорович, Берник Павло Степанович
МПК: B24B 31/06
Мітки: обробки, машина, вібропланетарної
Формула / Реферат:
1. Машина для вібропланетарної обробки, яка має два незалежних електромеханічних приводи для створення як обертального, так і плоского вібраційного руху в горизонтальній площині робочого контейнера, яка відрізняється тим, що має місце обертання підпружиненого робочого контейнера як навколо власної осі за допомогою вала, встановленого на опорних вузлах водила через плужні елементи, так і навколо центральної осі за допомогою обертання водила,...
Попередній патент: Препарат для лікування екзем, закусів шкіри і самопогризання у м’ясоїдних “дермамікс”
Наступний патент: Мастило для двигунів
Випадковий патент: Блок повітронагрівачів доменної печі