Спосіб підняття затонулих об’єктів
Номер патенту: 47323
Опубліковано: 17.06.2002
Автори: Колодченко Юрій Володимирович, Галь Анатолій Феодосійович, Бугаєнко Борис Андрійович
Формула / Реферат
1. Спосіб підняття затонулих об'єктів, що полягає в установленні гідроакустичних маяків на дні моря, опусканні захвату в розкритому положенні і наведенні його на затонулий об'єкт, зведенні елементів захвату на затонулому об'єкті, приєднанні до захвату напрямного троса, проведенні напрямного троса через наскрізні отвори модуля плавучості і наскрізні отвори вантажа-заглиблювача, формуванні гірлянди модулів плавучості, спільному спуску модуля плавучості і вантажа-заглиблювача по напрямному тросу до захвата за допомогою попускання вантажними лебідками шкентеля, пропущеного через поворотні блоки, що установлені на верхній частині вантажа-заглиблювача, стикуванні блока плавучості з захватом, піднятті вантажа-заглиблювача до плавзасобу за допомогою вибирання вантажними лебідками шкентеля, який відрізняється тим, що здійснюють установлення в центрі району розосередження на ділянці морського дна затонулих об'єктів за допомогою населеного і/або ненаселеного підводного апарата якірного пристрою направного троса, що вистрілюється, в місці розташування на морському дні захвата, від'єднують напрямний трос від захвата і приєднують його до якірного пристрою, що вистрілюється, установлюють за допомогою населених і/або ненаселених підводних апаратів на морському дні по кордонах району розосередження затонулих об'єктів на ділянці дна моря якірні пристрої, що вистрілюються, встановлені на рамі наведення захвата, потім спускають до них із плавзасобу пружні елементи і бридели системи наведення захвата з нижніми обмежниками гайдропного пристрою, приєднують їх до якірних пристроїв, що вистрілюються, установлених на морському дні, збирають і монтують раму наведення захвата з'єднанням її елементів і пропуском бриделей через кільця, які розміщені у вершинах рами наведення захвата, спускають раму наведення захвата до морського дна в район розосередження затонулих об'єктів, після зведення елементів захвата піднімають гірлянду модулів плавучості з захватом і затонулим об'єктом у ньому до поверхні води шляхом вибирання шкентеля по напрямному тросу.
2. Спосіб підняття затонулих об'єктів за п. 1, який відрізняється тим, що раму наведення захвата спускають до морського дна в район розосередження затонулих об'єктів до нижніх обмежників гайдропного пристрою, установлюють за допомогою населених і/або ненаселених підводних апаратів на бриделях і фіксують над рамою наведення захвата верхні обмежники гайдропного пристрою.
3. Спосіб підняття затонулих об'єктів за п. 1, який відрізняється тим, що для підняття іншого затонулого об'єкта повторний спуск захвата здійснюють шляхом його заглиблення за допомогою вантажа-заглиблювача в розкритому положенні по напрямному тросу в район установлених на морському дні якірних пристроїв, що вистрілюються, рами наведення захвата і якірного пристрою, що вистрілюється, встановлених на напрямному тросі, і наводять захват на затонулий об'єкт за допомогою переміщення рами наведення захвата щодо морського дна і затонулих об'єктів у горизонтальній площині шляхом вибирання і/або попущення бриделей системи наведення захвата, при одночасному візуальному контролі положення захвата щодо затонулих об'єктів за допомогою телевізійної системи населеного і/або ненаселеного підводного апарата, повторно зводять елементи захвата на затонулому об'єкті і піднімають захват з затонулим об'єктом.
Текст
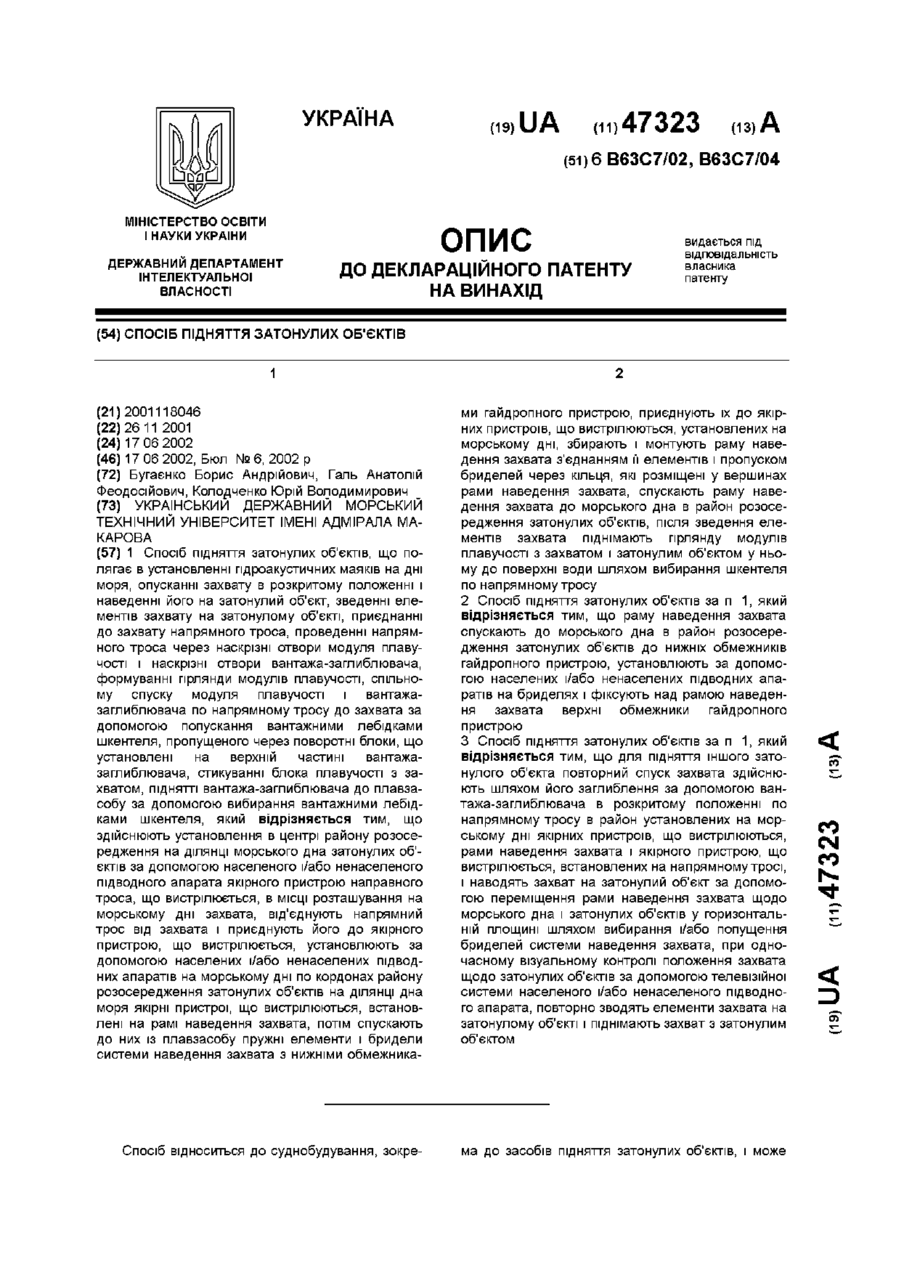
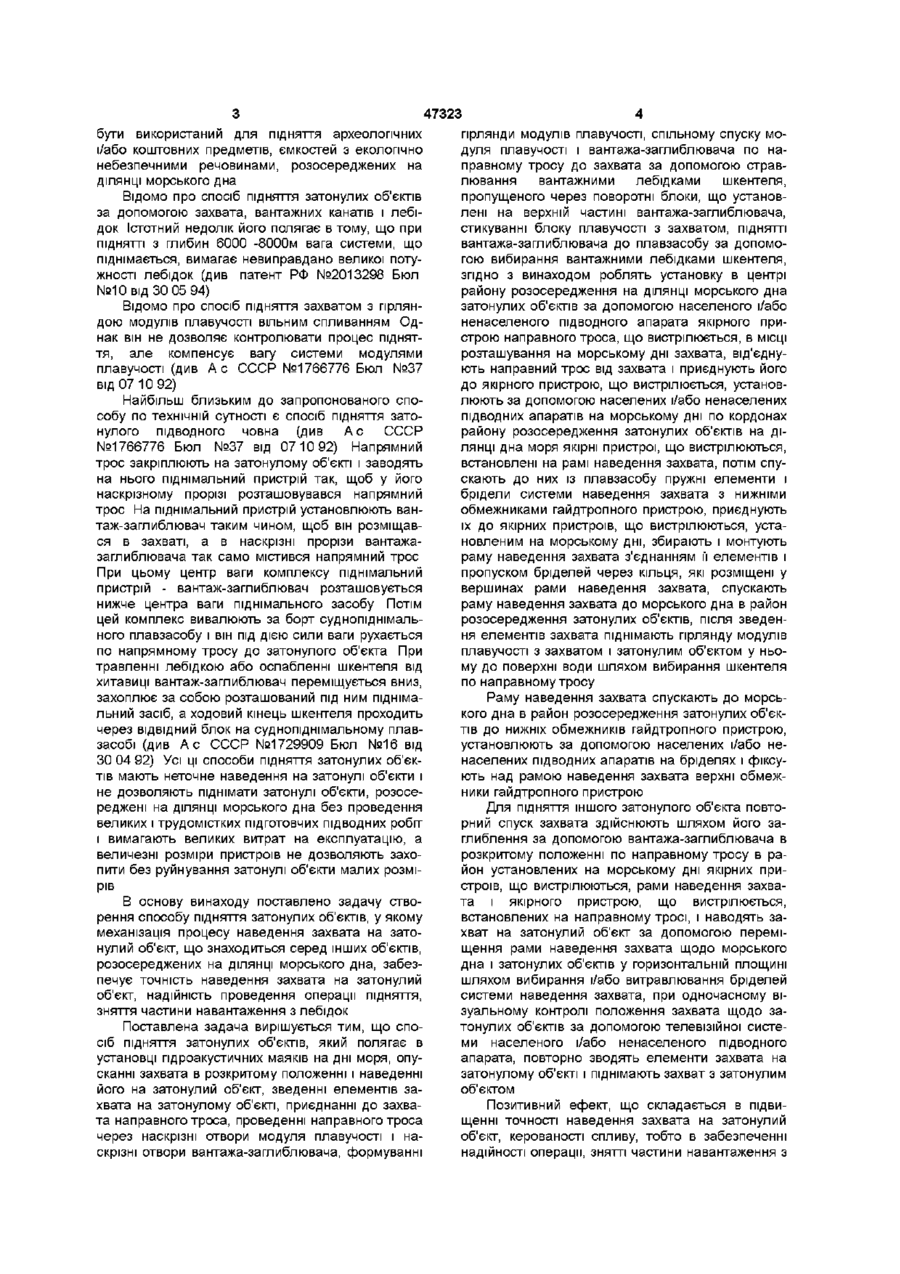
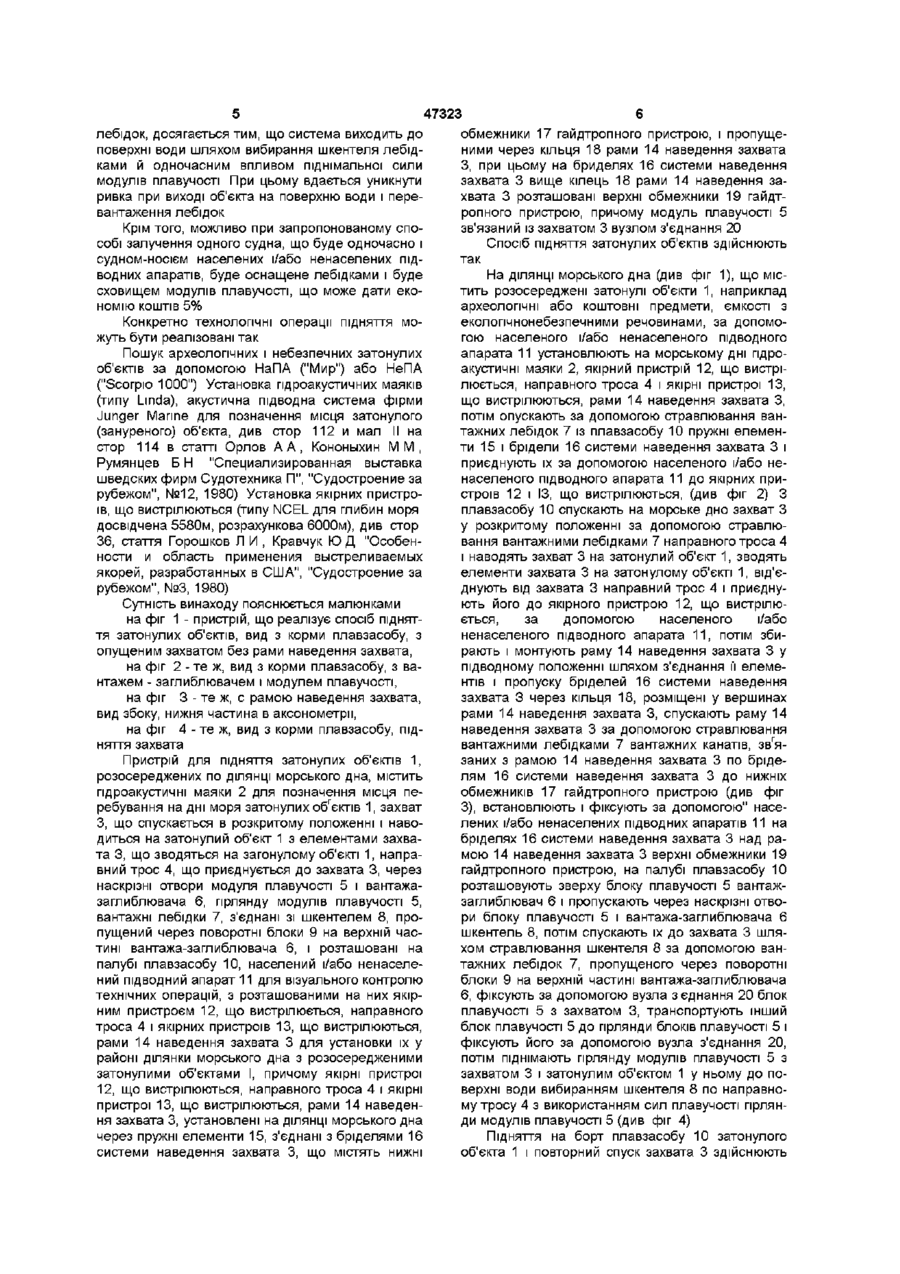
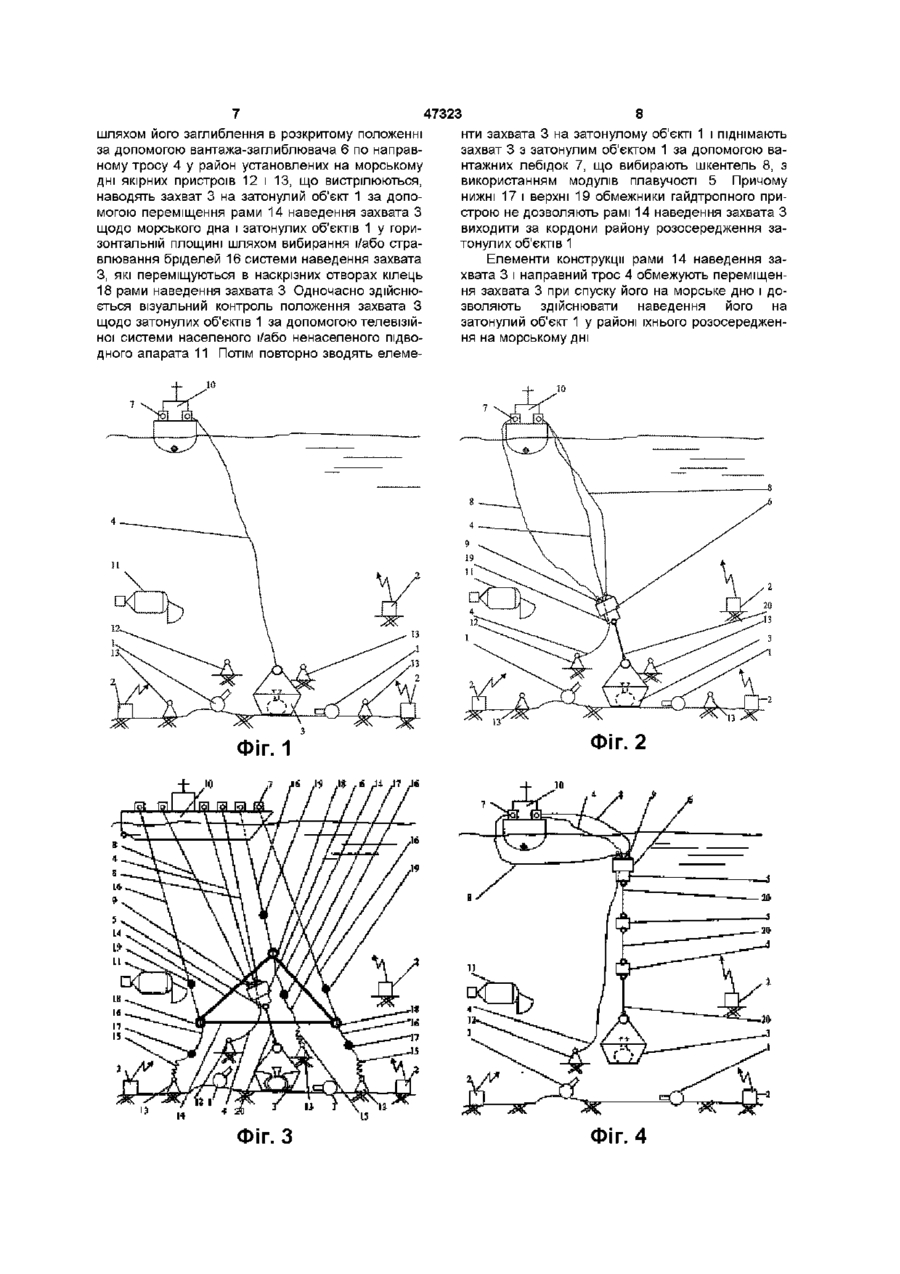
1 Спосіб підняття затонулих об'єісгів, що полягає в установленні гідроакустичних маяків на дні моря, опусканні захвату в розкритому положенні і наведенні його на затонулий об'єкт, зведенні елементів захвату на затонулому об'єкті, приєднанні до захвату напрямного троса, проведенні напрямного троса через наскрізні отвори модуля плавучості і наскрізні отвори вантажа-заглиблювача, формуванні гірлянди модулів плавучості, спільному спуску модуля плавучості і вантажазаглиблювача по напрямному тросу до захвата за допомогою попускання вантажними лебідками шкентеля, пропущеного через поворотні блоки, що установлені на верхній частині вантажазаглиблювача, стикуванні блока плавучості з захватом, ПІДНЯТТІ вантажа-заглиблювача до плавзасобу за допомогою вибирання вантажними лебідками шкентеля, який відрізняється тим, що здійснюють установлення в центрі району розосередження на ДІЛЯНЦІ морського дна затонулих об'єктів за допомогою населеного і/або ненаселеного підводного апарата якірного пристрою направного троса, що вистрілюється, в МІСЦІ розташування на морському дні захвата, від'єднують напрямний трос від захвата і приєднують його до якірного пристрою, що вистрілюється, установлюють за допомогою населених і/або ненаселених підводних апаратів на морському дні по кордонах району розосередження затонулих об'єктів на ДІЛЯНЦІ дна моря якірні пристрої, що вистрілюються, встановлені на рамі наведення захвата, потім спускають до них із плавзасобу пружні елементи і бридели системи наведення захвата з нижніми обмежника ми гаидропного пристрою, приєднують їх до якірних пристроїв, що вистрілюються, установлених на морському дні, збирають і монтують раму наведення захвата з'єднанням її елементів і пропуском бриделей через кільця, які розміщені у вершинах рами наведення захвата, спускають раму наведення захвата до морського дна в район розосередження затонулих об'єктів, після зведення елементів захвата піднімають гірлянду модулів плавучості з захватом і затонулим об'єктом у ньому до поверхні води шляхом вибирання шкентеля по напрямному тросу 2 Спосіб підняття затонулих об'єктів за п 1, який відрізняється тим, що раму наведення захвата спускають до морського дна в район розосередження затонулих об'єктів до нижніх обмежників гаидропного пристрою, установлюють за допомогою населених і/або ненаселених підводних апаратів на бриделях і фіксують над рамою наведення захвата верхні обмежники гаидропного пристрою 3 Спосіб підняття затонулих об'єктів за п 1, який відрізняється тим, що для підняття іншого затонулого об'єкта повторний спуск захвата здійснюють шляхом його заглиблення за допомогою вантажа-заглиблювача в розкритому положенні по напрямному тросу в район установлених на морському дні якірних пристроїв, що вистрілюються, рами наведення захвата і якірного пристрою, що вистрілюється, встановлених на напрямному тросі, і наводять захват на затонулий об'єкт за допомогою переміщення рами наведення захвата щодо морського дна і затонулих об'єктів у горизонтальній площині шляхом вибирання і/або попущення бриделей системи наведення захвата, при одночасному візуальному контролі положення захвата щодо затонулих об'єктів за допомогою телевізійної системи населеного і/або ненаселеного підводного апарата, повторно зводять елементи захвата на затонулому об'єкті і піднімають захват з затонулим об'єктом Спосіб відноситься до суднобудування, зокре ма до засобів підняття затонулих об'єктів, і може СО сч со 47323 бути використаний для підняття археологічних і/або коштовних предметів, ємкостей з екологічно небезпечними речовинами, розосереджених на ДІЛЯНЦІ морського дна Відомо про спосіб підняття затонулих об'єктів за допомогою захвата, вантажних канатів і лебідок Істотний недолік його полягає в тому, що при ПІДНЯТТІ з глибин 6000 -8000м вага системи, що піднімається, вимагає невиправдано великої потужності лебідок (див патент РФ №2013298 Бюл №10 від 30 05 94) Відомо про спосіб підняття захватом з гірляндою модулів плавучості вільним спливанням Однак він не дозволяє контролювати процес підняття, але компенсує вагу системи модулями плавучості (див А с СССР №1766776 Бюл №37 від 07 10 92) Найбільш близьким до запропонованого способу по технічній сутності є спосіб підняття затонулого підводного човна (див Ас СССР №1766776 Бюл №37 від 0710 92) Напрямний трос закріплюють на затонулому об'єкті і заводять на нього піднімальний пристрій так, щоб у його наскрізному прорізі розташовувався напрямний трос На піднімальний пристрій установлюють вантаж-заглиблювач таким чином, щоб він розміщався в захваті, а в наскрізні прорізи вантажазаглиблювача так само містився напрямний трос При цьому центр ваги комплексу піднімальний пристрій - вантаж-заглиблювач розташовується нижче центра ваги піднімального засобу Потім цей комплекс вивалюють за борт суднопіднімального плавзасобу і він під дією сили ваги рухається по напрямному тросу до затонулого об'єкта При травленні лебідкою або ослабленні шкентеля від хитавиці вантаж-заглиблювач переміщується вниз, захоплює за собою розташований під ним піднімальний засіб, а ходовий кінець шкентеля проходить через ВІДВІДНИЙ блок на суднопіднімальному плавзасобі (див А с СССР №1729909 Бюл №16 від ЗО 04 92) Усі ЦІ способи підняття затонулих об'єктів мають неточне наведення на затонулі об'єкти і не дозволяють піднімати затонулі об'єкти, розосереджені на ДІЛЯНЦІ морського дна без проведення великих і трудомістких підготовчих підводних робіт і вимагають великих витрат на експлуатацію, а величезні розміри пристроїв не дозволяють захопити без руйнування затонулі об'єкти малих розмірів В основу винаходу поставлено задачу створення способу підняття затонулих об'єктів, у якому механізація процесу наведення захвата на затонулий об'єкт, що знаходиться серед інших об'єктів, розосереджених на ДІЛЯНЦІ морського дна, забезпечує точність наведення захвата на затонулий об'єкт, надійність проведення операції підняття, зняття частини навантаження з лебідок Поставлена задача вирішується тим, що спосіб підняття затонулих об'єктів, який полягає в установці гідроакустичних маяків на дні моря, опусканні захвата в розкритому положенні і наведенні його на затонулий об'єкт, зведенні елементів захвата на затонулому об'єкті, приєднанні до захвата направного троса, проведенні направного троса через наскрізні отвори модуля плавучості і наскрізні отвори вантажа-заглиблювача, формуванні гірлянди модулів плавучості, спільному спуску модуля плавучості і вантажа-заглиблювача по направному тросу до захвата за допомогою стравлювання вантажними лебідками шкентеля, пропущеного через поворотні блоки, що установлені на верхній частині вантажа-заглиблювача, стикуванні блоку плавучості з захватом, ПІДНЯТТІ вантажа-заглиблювача до плавзасобу за допомогою вибирання вантажними лебідками шкентеля, згідно з винаходом роблять установку в центрі району розосередження на ДІЛЯНЦІ морського дна затонулих об'єктів за допомогою населеного і/або ненаселеного підводного апарата якірного пристрою направного троса, що вистрілюється, в МІСЦІ розташування на морському дні захвата, від'єднують направний трос від захвата і приєднують його до якірного пристрою, що вистрілюється, установлюють за допомогою населених і/або ненаселених підводних апаратів на морському дні по кордонах району розосередження затонулих об'єктів на ДІЛЯНЦІ дна моря якірні пристрої, що вистрілюються, встановлені на рамі наведення захвата, потім спускають до них із плавзасобу пружні елементи і брідели системи наведення захвата з нижніми обмежниками гайдтропного пристрою, приєднують їх до якірних пристроїв, що вистрілюються, установленим на морському дні, збирають і монтують раму наведення захвата з'єднанням її елементів і пропуском бріделей через кільця, які розміщені у вершинах рами наведення захвата, спускають раму наведення захвата до морського дна в район розосередження затонулих об'єктів, після зведення елементів захвата піднімають гірлянду модулів плавучості з захватом і затонулим об'єктом у ньому до поверхні води шляхом вибирання шкентеля по направному тросу Раму наведення захвата спускають до морського дна в район розосередження затонулих об'єктів до нижніх обмежників гайдтропного пристрою, установлюють за допомогою населених і/або ненаселених підводних апаратів на бріделях і фіксують над рамою наведення захвата верхні обмежники гайдтропного пристрою Для підняття іншого затонулого об'єкта повторний спуск захвата здійснюють шляхом його заглиблення за допомогою вантажа-заглиблювача в розкритому положенні по направному тросу в район установлених на морському дні якірних пристроїв, що вистрілюються, рами наведення захвата і якірного пристрою, що вистрілюється, встановлених на направному тросі, і наводять захват на затонулий об'єкт за допомогою переміщення рами наведення захвата щодо морського дна і затонулих об'єктів у горизонтальній площині шляхом вибирання і/або витравлювання бріделей системи наведення захвата, при одночасному візуальному контролі положення захвата щодо затонулих об'єктів за допомогою телевізійної системи населеного і/або ненаселеного підводного апарата, повторно зводять елементи захвата на затонулому об'єкті і піднімають захват з затонулим об'єктом Позитивний ефект, що складається в підвищенні точності наведення захвата на затонулий об'єкт, керованості спливу, тобто в забезпеченні надійності операції, знятті частини навантаження з 47323 лебідок, досягається тим, що система виходить до поверхні води шляхом вибирання шкентеля лебідками й одночасним впливом піднімальної сили модулів плавучості При цьому вдається уникнути ривка при виході об'єкта на поверхню води і перевантаження лебідок Крім того, можливо при запропонованому способі залучення одного судна, що буде одночасно і судном-носієм населених і/або ненаселених підводних апаратів, буде оснащене лебідками і буде сховищем модулів плавучості, що може дати економію коштів 5% Конкретно технологічні операції підняття можуть бути реалізовані так Пошук археологічних і небезпечних затонулих об'єктів за допомогою НаПА ("Мир") або НеПА ("Scorpio 1000") Установка гідроакустичних маяків (типу Linda), акустична підводна система фірми Junger Marine для позначення місця затонулого (зануреного) об'єкта, див стор 112 и мал II на crop 114 в статті Орлов А А, Кононыхин М М , Румянцев Б Н "Специализированная выставка шведских фирм Судотехника П", "Судостроение за рубежом", №12, 1980) Установка якірних пристроїв, що вистрілюються (типу NCEL для глибин моря досвідчена 5580м, розрахункова 6000м), див стор 36, стаття Горошков Л И , Кравчук Ю Д "Особенности и область применения выстреливаемых якорей, разработанных в США", "Судостроение за рубежом", №3, 1980) Сутність винаходу пояснюється малюнками на фіг 1 - пристрій, що реалізує спосіб підняття затонулих об'єктів, вид з корми плавзасобу, з опущеним захватом без рами наведення захвата, на фіг 2 - те ж, вид з корми плавзасобу, з вантажем - заглиблювачем і модулем плавучості, на фіг 3 - те ж, с рамою наведення захвата, вид збоку, нижня частина в аксонометрії, на фіг 4 - те ж, вид з корми плавзасобу, підняття захвата Пристрій для підняття затонулих об'єктів 1, розосереджених по ДІЛЯНЦІ морського дна, містить гідроакустичні маяки 2 для позначення місця перебування на дні моря затонулих обгєктів 1, захват З, що спускається в розкритому положенні і наводиться на затонулий об'єкт 1 з елементами захвата 3, що зводяться на загонулому об'єкті 1, направний трос 4, що приєднується до захвата 3, через наскрізні отвори модуля плавучості 5 і вантажазаглиблювача 6, гірлянду модулів плавучості 5, вантажні лебідки 7, з'єднані зі шкентелем 8, пропущений через поворотні блоки 9 на верхній частині вантажа-заглиблювача 6, і розташовані на палубі плавзасобу 10, населений і/або ненаселений підводний апарат 11 для візуального контролю технічних операцій, з розташованими на них якірним пристроєм 12, що вистрілюється, направного троса 4 і якірних пристроїв 13, що вистрілюються, рами 14 наведення захвата 3 для установки їх у районі ділянки морського дна з розосередженими затонулими об'єктами І, причому якірні пристрої 12, що вистрілюються, направного троса 4 і якірні пристрої 13, що вистрілюються, рами 14 наведення захвата 3, установлені на ДІЛЯНЦІ морського дна через пружні елементи 15, з'єднані з бріделями 16 системи наведення захвата 3, що містять нижні обмежники 17 гайдтропного пристрою, і пропущеними через кільця 18 рами 14 наведення захвата З, при цьому на бриделях 16 системи наведення захвата 3 вище кілець 18 рами 14 наведення захвата 3 розташовані верхні обмежники 19 гайдтропного пристрою, причому модуль плавучості 5 зв'язаний із захватом 3 вузлом з'єднання 20 Спосіб підняття затонулих об'єктів здійснюють так На ДІЛЯНЦІ морського дна (див фіг 1), що міс тить розосереджені затонулі об'єкти 1, наприклад археологічні або коштовні предмети, ємкості з еколопчнонебезпечними речовинами, за допомогою населеного і/або ненаселеного підводного апарата 11 установлюють на морському дні гідроакустичні маяки 2, якірний пристрій 12, що вистрілюється, направного троса 4 і якірні пристрої 13, що вистрілюються, рами 14 наведення захвата З, потім опускають за допомогою стравлювання вантажних лебідок 7 із плавзасобу 10 пружні елементи 15 і брідели 16 системи наведення захвата 3 і приєднують їх за допомогою населеного і/або ненаселеного підводного апарата 11 до якірних пристроїв 12 і ІЗ, що вистрілюються, (див фіг 2) З плавзасобу 10 спускають на морське дно захват З у розкритому положенні за допомогою стравлювання вантажними лебідками 7 направного троса 4 і наводять захват 3 на затонулий об'єкт 1, зводять елементи захвата 3 на затонулому об'єкті 1, від'єднують від захвата 3 направний трос 4 і приєднують його до якірного пристрою 12, що вистрілюється, за допомогою населеного і/або ненаселеного підводного апарата 11, потім збирають і монтують раму 14 наведення захвата 3 у підводному положенні шляхом з'єднання її елементів і пропуску бріделей 16 системи наведення захвата 3 через кільця 18, розміщені у вершинах рами 14 наведення захвата 3, спускають раму 14 наведення захвата 3 за допомогою стравлювання вантажними лебідками 7 вантажних канатів, звгязаних з рамою 14 наведення захвата 3 по бріделям 16 системи наведення захвата 3 до нижніх обмежників 17 гайдтропного пристрою (див фіг 3), встановлюють і фіксують за допомогою" населених і/або ненаселених підводних апаратів 11 на бріделях 16 системи наведення захвата 3 над рамою 14 наведення захвата 3 верхні обмежники 19 гайдтропного пристрою, на палубі плавзасобу 10 розташовують зверху блоку плавучості 5 вантажзаглиблювач 6 і пропускають через наскрізні отвори блоку плавучості 5 і вантажа-заглиблювача 6 шкентель 8, потім спускають їх до захвата 3 шляхом стравлювання шкентеля 8 за допомогою вантажних лебідок 7, пропущеного через поворотні блоки 9 на верхній частині вантажа-заглиблювача 6, фіксують за допомогою вузла з єднання 20 блок плавучості 5 з захватом 3, транспортують інший блок плавучості 5 до гірлянди блоків плавучості 5 і фіксують його за допомогою вузла з'єднання 20, потім піднімають гірлянду модулів плавучості 5 з захватом 3 і затонулим об'єктом 1 у ньому до поверхні води вибиранням шкентеля 8 по направному тросу 4 з використанням сил плавучості гірлянди модулів плавучості 5 (див фіг 4) Підняття на борт плавзасобу 10 затонулого об'єкта 1 і повторний спуск захвата 3 здійснюють 47323 шляхом його заглиблення в розкритому положенні за допомогою вантажа-заглиблювача 6 по направному тросу 4 у район установлених на морському дні якірних пристроїв 12 і 13, що вистрілюються, наводять захват 3 на затонулий об'єкт 1 за допомогою переміщення рами 14 наведення захвата З щодо морського дна і затонулих об'єктів 1 у горизонтальній площині шляхом вибирання і/або стравлювання бріделеи 16 системи наведення захвата З, які переміщуються в наскрізних отворах кілець 18 рами наведення захвата 3 Одночасно здійснюється візуальний контроль положення захвата З щодо затонулих об'єктів 1 за допомогою телевізійної системи населеного і/або ненаселеного підводного апарата 11 Потім повторно зводять елеме 8 нти захвата 3 на затонулому об'єкті 1 і піднімають захват 3 з затонулим об'єктом 1 за допомогою вантажних лебідок 7, що вибирають шкентель 8, з використанням модулів плавучості 5 Причому нижні 17 і верхні 19 обмежники гайдтропного пристрою не дозволяють рамі 14 наведення захвата З виходити за кордони району розосередження затонулих об'єктів 1 Елементи конструкції рами 14 наведення захвата 3 і направний трос 4 обмежують переміщення захвата 3 при спуску його на морське дно і дозволяють здійснювати наведення його на затонулий об'єкт 1 у районі їхнього розосередження на морському дні Ж ФІГ. 1 Фіг. 2 Фіг. З Фіг. 4 47323 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 10
ДивитисяДодаткова інформація
Автори англійськоюBuhaienko Borys Andriiovych, Hal Anatolii Feodosiiovych
Автори російськоюБугаенко Борис Андреевич, Галь Анатолий Феодосьевич
МПК / Мітки
Мітки: затонулих, спосіб, підняття, об'єктів
Код посилання
<a href="https://ua.patents.su/5-47323-sposib-pidnyattya-zatonulikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб підняття затонулих об’єктів</a>
Спосіб підйому затонулих об’єктів
Номер патенту: 43295
Опубліковано: 15.11.2001
Автори: Скиба Джон Михайлович, Шурчков Анатолій Васильович, Наумов Сергій Євгенович
МПК: B63C 7/06
Мітки: затонулих, спосіб, підйому, об'єктів
Формула / Реферат:
Спосіб підйому затонулого об'єкта, який полягає в з'єднанні цього об'єкта з зануреним понтоном шляхом приморожування за рахунок подачі зрідженого газу по трубопроводах з рятувального судна в трубчасті теплообмінники, які закріплені на понтоні, плавучість якого при підйомі збільшується за рахунок витискання з нього води відпрацьованим газом в від згаданних трубчастих теплообмінників, який відрізняється тим, що зріджений газ. подають по...
Спосіб підняття об’єкта, що знаходиться під водою, та підйомний засіб для його здійснення
Номер патенту: 42430
Опубліковано: 15.10.2001
Автор: Міндолін Сергій Олександрович
МПК: B63C 7/06
Мітки: спосіб, підняття, здійснення, засіб, підйомний, водою, знаходиться, об'єкта
Формула / Реферат:
1. Спосіб підняття об'єкта, що знаходиться під водою, який включає створення підйомної сили за допомогою підйомної системи, яка складається з підйомного засобу, з'єднаного з об'єктом, що піднімається, не менше як одним силовим зв'язком, який відрізняється тим, що до початку підйому корпус підйомного засобу розташовують відчиненим боком вниз і з нього витискують воду, а після відриву об'єкта від дна корпус підйомного засобу розвертають...
Система для піднімання затонулих об’єктів
Номер патенту: 10022
Опубліковано: 30.09.1996
Автор: Кунгурцев Юрій Миколайович
Мітки: система, об'єктів, затонулих, піднімання
Формула / Реферат:
1. Система для подъема затонувших объектов, включающая узел захвата со средством наведения на затонувший объект, опускаемый на объект понтон и средство продувки понтона газом, отличающаяся тем, что узел захвата выполнен в виде шарнирно соединенных в ряд арочных рамок, расположенных с возможностью охвата с боков затонувшего объекта, на стойках которых смонтированы подпружиненные защелки и снизу шарнирно прикреплены оппозитно расположенные...
Спосіб підняття затонулого об’єкта
Номер патенту: 17520
Опубліковано: 06.05.1997
Автори: Бугаєнко Борис Андрійович, Галь Анатолій Феодосійович, Снігур Анатолій Кирилович
Мітки: спосіб, затонулого, підняття, об'єкта
Формула / Реферат:
Способ подъема затонувшего объекта, заключающийся в приложении к последнему подъемно-тягового усилия за счет выборки тягового каната с захватом, который опускают с самоходного надводного плавсредства при помощи спуско-подъемного устройства, на лебедке которого закреплен один конец упомянутого тягового каната, другой конец которого пропущен через обводной блок захвата и закреплен, отличающийся тем, что при опускании захвата используют также...
Спосіб підняття високов’язкої нафти з свердловини
Номер патенту: 14668
Опубліковано: 17.09.2001
Автори: Кононюк Борис Андронович, Патрай Володимир Петрович, Балакіров Юрій Айрапетович, Радченко Ігор Гнатович, Хотульов Генадій Петрович, Лилак Микола Миколайович
МПК: E21B 43/34, E21B 43/00, E21B 43/12
Мітки: спосіб, нафти, підняття, високов'язкої, свердловини
Формула / Реферат:
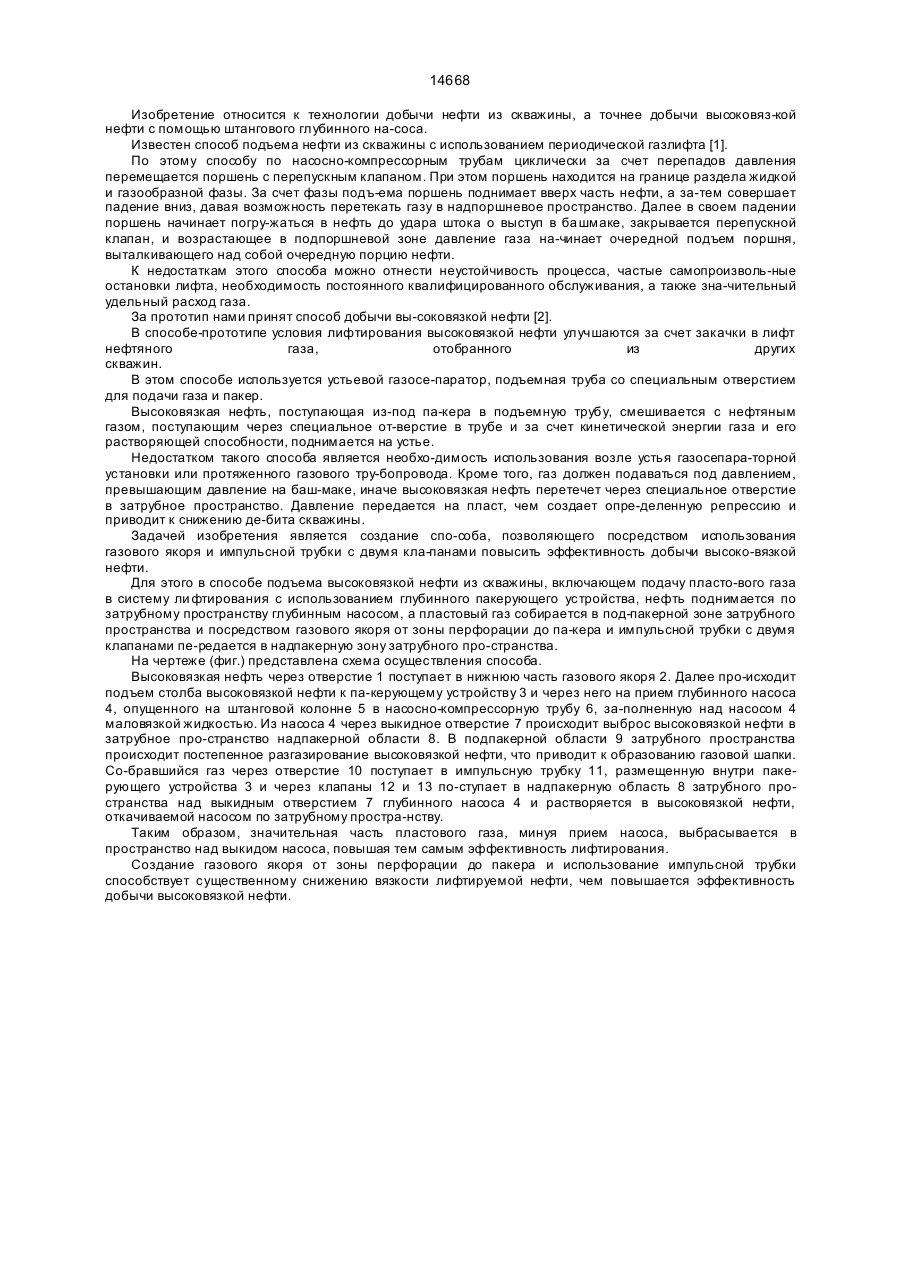
Способ подъема высоковязкой нефти из скважины, включающий подачу пластового газа в систему лифтирования с использованием глубинного пакерующего устройства, отличающийся тем, что нефть поднимается по затрубному пространству глубинным насосом, а пластовый газ собирается в подпакерной зоне затрубного пространства и посредством газового якоря от зоны перфорации до пакера и импульсной трубки с двумя клапанами перепускается в надпакерную зону...
Попередній патент: Похідні ксантину і їх фармакологічно переносимі солі
Наступний патент: Ортопедична рукавиця бабіненка
Випадковий патент: Засіб для лікування ураження слизової оболонки ротової порожнини вірусної природи