Спосіб регулювання швидкості золотова

Формула / Реферат
Спосіб регулювання швидкості, що полягає в зміні кутової швидкості автоматичним приладом, наприклад гідротрансформатором і коробкою передач, залежно від швидкості машини і обертаючого моменту двигуна, який відрізняється тим, що одержують безступеневе керування швидкістю за рахунок подачі різниці кутової швидкості з датчика на керуючі шестерні регулятора шляхом встановлення кінематичного зв’язку між датчиком та регулятором.
Текст
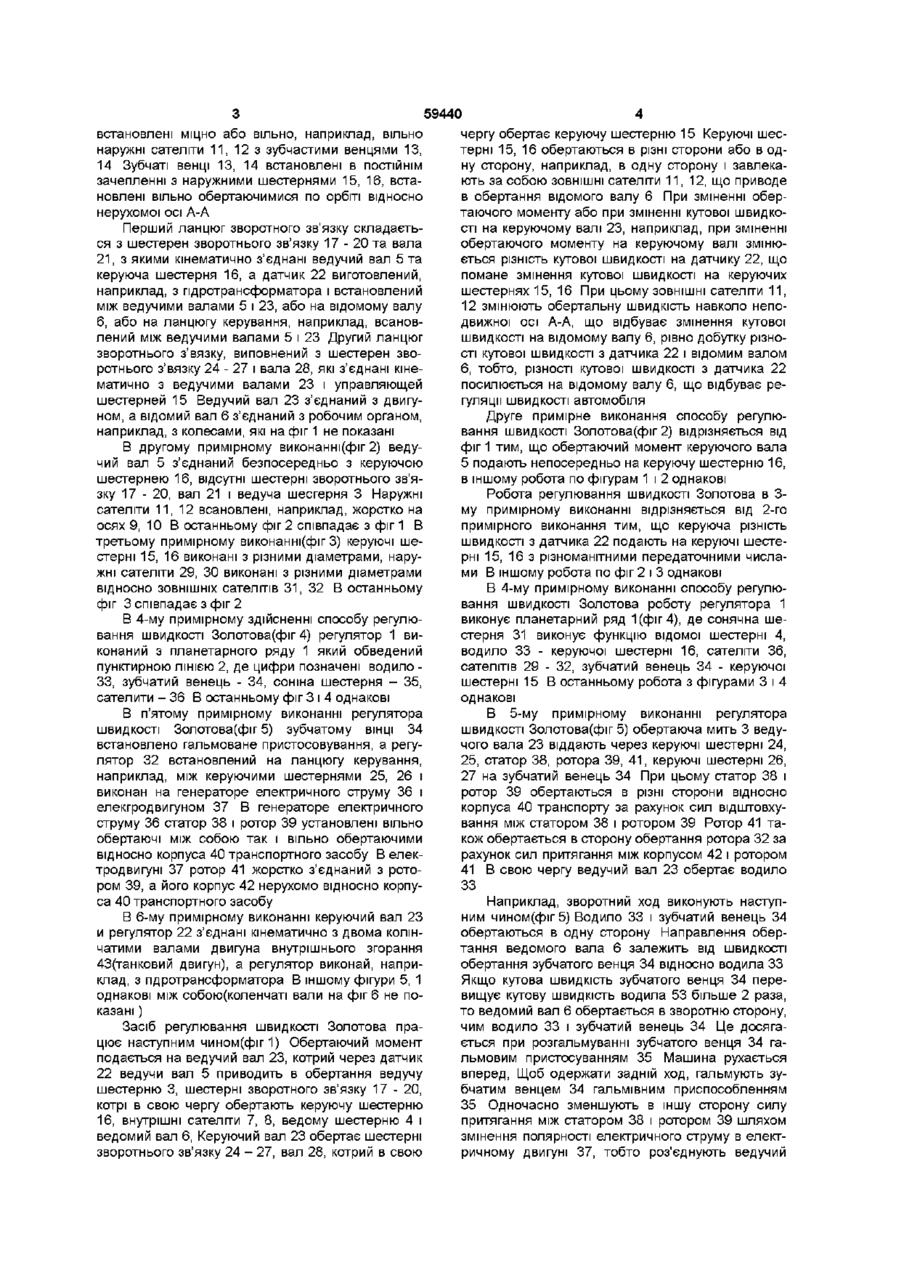
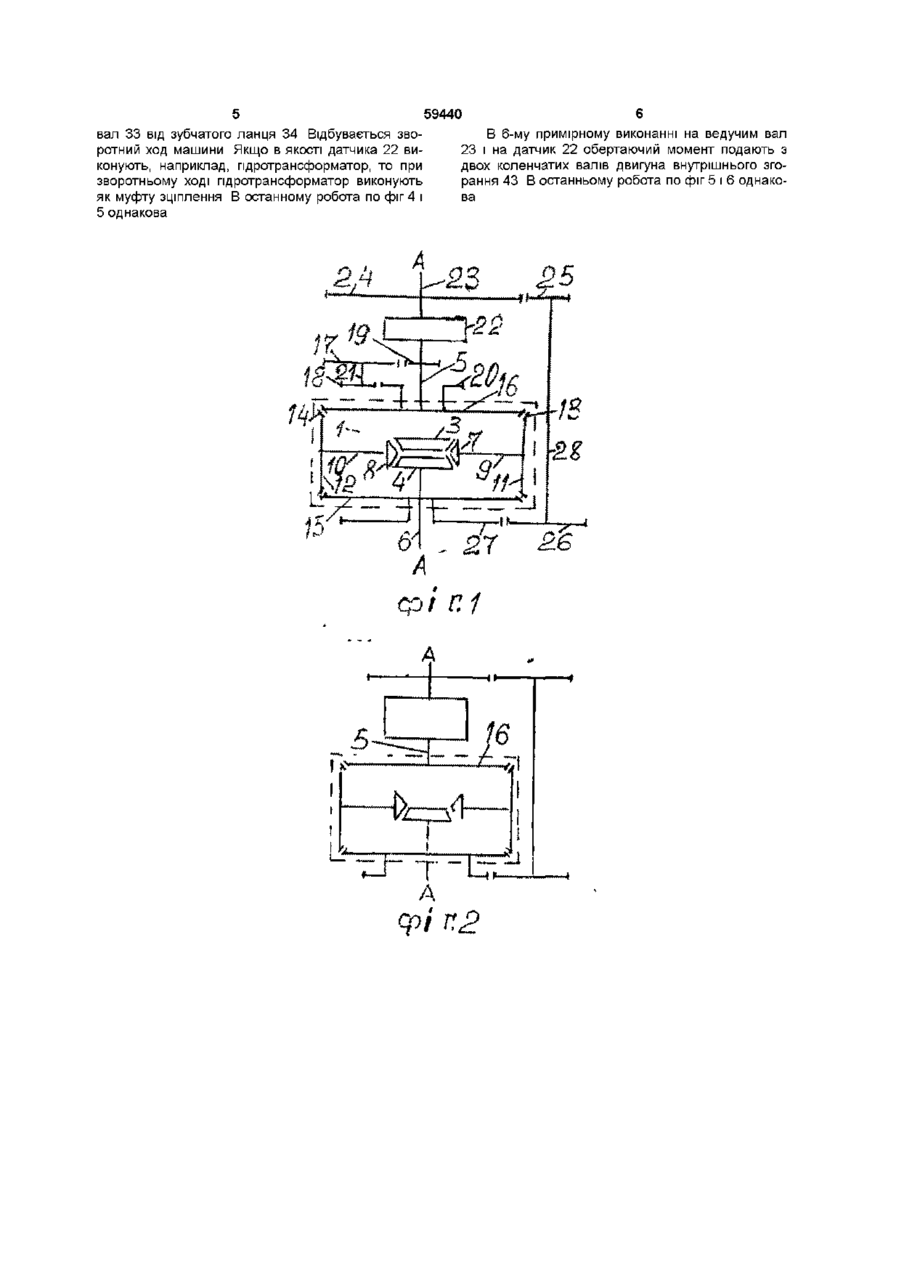
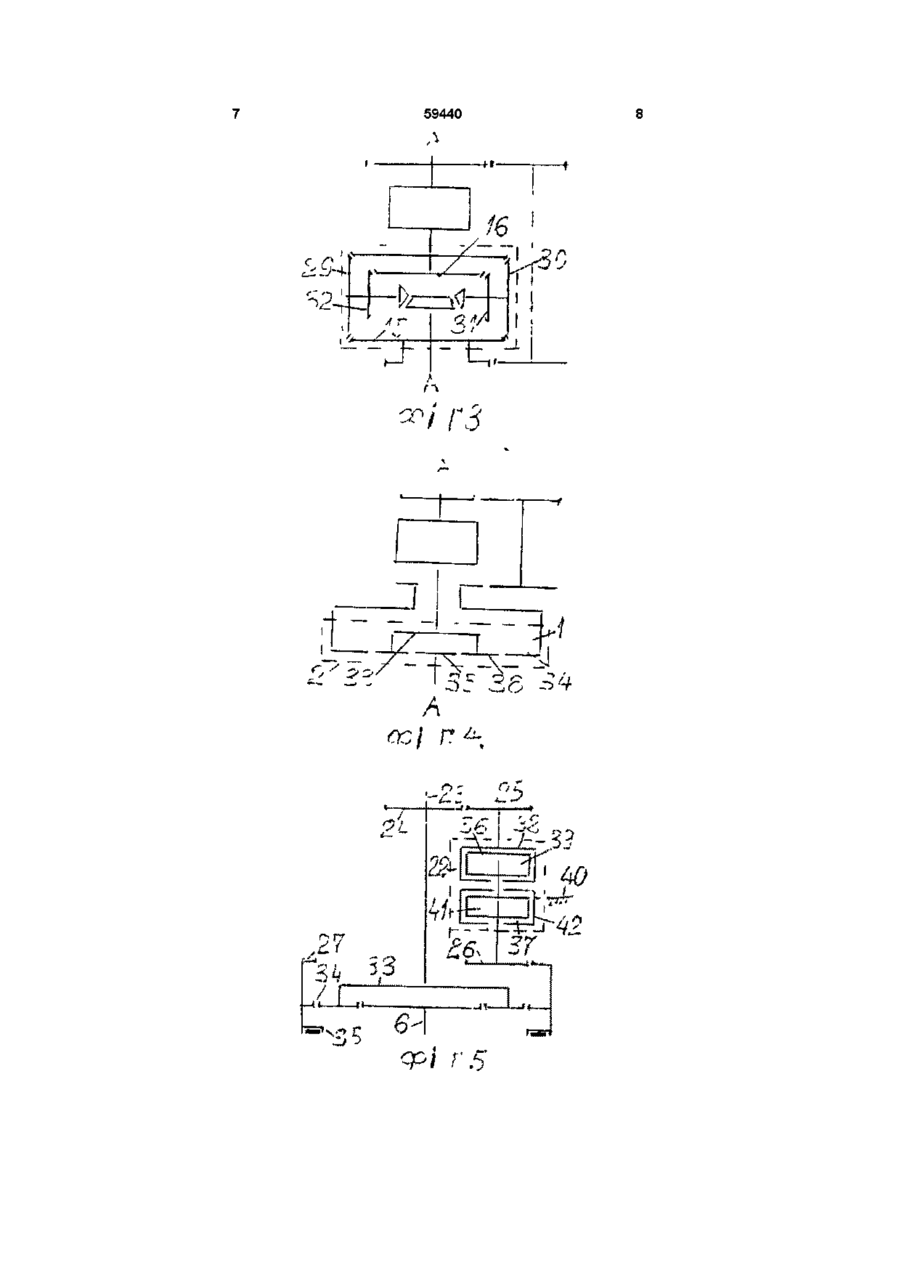
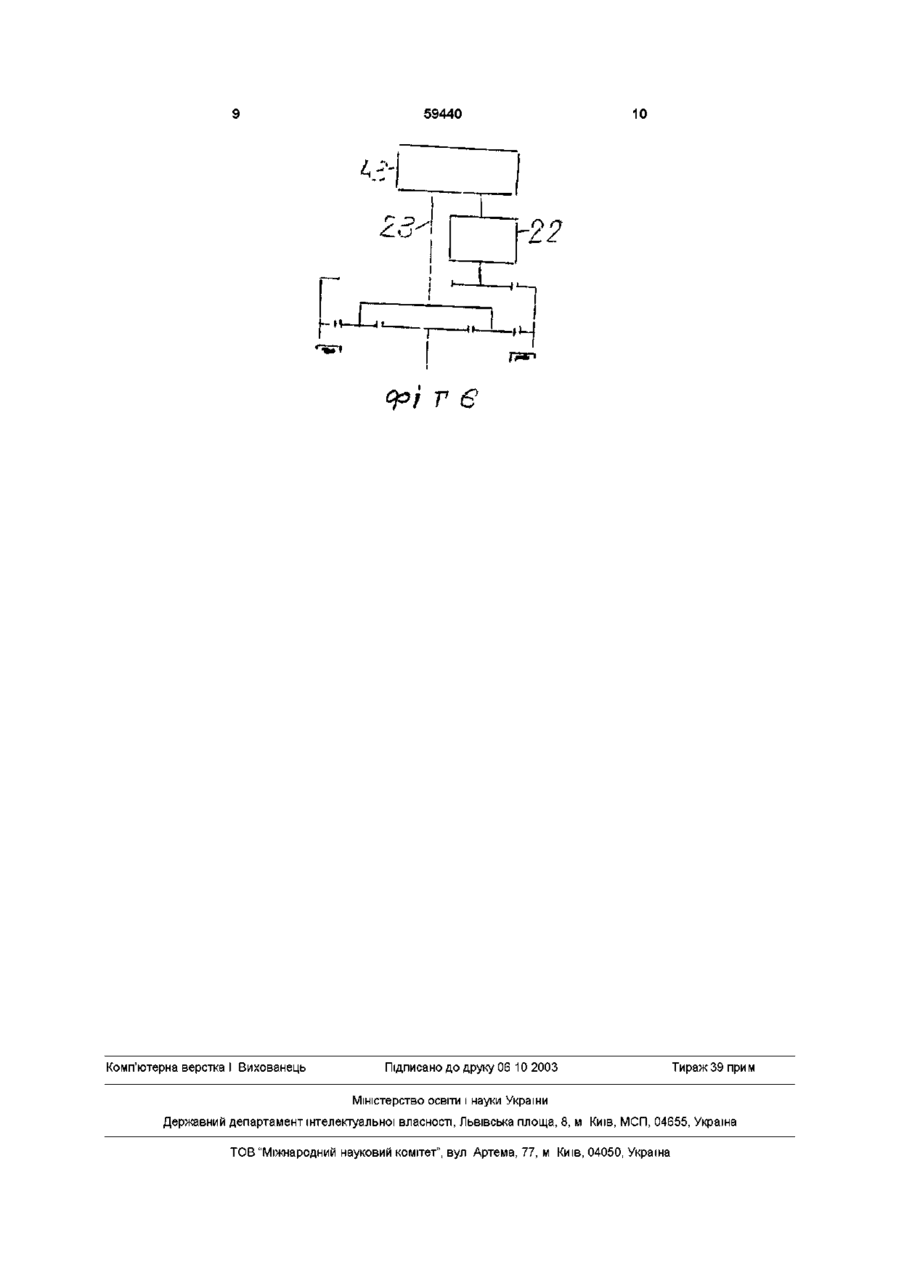
Спосіб регулювання швидкості, що полягає в ЗМІНІ кутової швидкості автоматичним приладом, наприклад гідротрансформатором і коробкою передач, залежно від швидкості машини і обертаючого моменту двигуна, який відрізняється тим, що одержують безступеневе керування швидкістю за рахунок подачі різниці кутової швидкості з датчика на керуючі шестерні регулятора шляхом встановлення кінематичного зв'язку між датчиком та регулятором що зменшує витрати палива Датчик завантажен на частину потужності, так як друга частина минає датчик, поступає через зворотний зв'язок і регулятор на виконавчий орган, наприклад, на колесо, що зменшує малогабаритні показники датчика Якщо замінити Трансмісію(наприклад, в БелАЗе), виконану на електричних машинах по схемі двигун внутрішнього згоряння, генератор електричного струму, електродвигун з редуктором, колеса на схему по фіг 6, то при інших рівних технічних умовах, якщо припустити, що датчик і регулятор еквівалентні двигунам з редуктором в колесах, так як їх потужності приблизно дорівнюють, то з машини(наприклад, БелАЗ) звільнюється генератор електричного струму на повну потужність двигуна внутрішнього згоряння і два електродвигуна з редукторами, що зменшують масогабаритні показники і збільшується грузопід'ємність цієї машини Спосіб регулювання швидкості Золотова показано на різних схемах Наприклад, на фіг 1 - 6 схематично показані способи регулювання швидкості Золотова Спосіб регулювання швидкості Золотова(фіг 1) виконай з регулятора 1, який обведений пунктирною ЛІНІЄЮ 2 Регулятор 1 в свою чергу виконаний з ведучої шестерні 3, відомої шестерні 4, установленої вздовж нерухомої осі А-А 3 ведучої шестерні 3 міцно зв'язаний ведучий вал 5, а ведомой шестернею 4 - ведомий вал 6 Внутрішні сателіти 7, 8 одночасно зв'язані з зубцями як ведучих так і відомих шестерен 3, 4 і встановлені міцно на осях 9, 10 Осі 9, 10 встановлені з можливістю обертатися навколо нерухомої осі А-А по орбіті На осях 9, 10 О ю 59440 встановлені міцно або вільно, наприклад, вільно наружні сателіти 11, 12 з зубчастими венцями 13, 14 Зубчаті венці 13, 14 встановлені в ПОСТІЙНІМ зачепленні з наружними шестернями 15, 16, встановлені вільно обертаючимися по орбіті відносно нерухомої осі А-А Перший ланцюг зворотного зв'язку складається з шестерен зворотнього зв'язку 17 - 20 та вала 21, з якими кінематично з'єднані ведучий вал 5 та керуюча шестерня 16, а датчик 22 виготовлений, наприклад, з гідротрансформатора і встановлений між ведучими валами 5 і 23, або на відомому валу 6, або на ланцюгу керування, наприклад, всановлений між ведучими валами 5 і 23 Другий ланцюг зворотнього з'вязку, виповнений з шестерен зворотнього з'вязку 24 - 27 і вала 28, які з'єднані кінематично з ведучими валами 23 і управляющей шестерней 15 Ведучий вал 23 з'єднаний з двигуном, а відомий вал 6 з'єднаний з робочим органом, наприклад, з колесами, які на фіг 1 не показані В другому примірному виконанні(фіг 2) ведучий вал 5 з'єднаний безпосередньо з керуючою шестернею 16, відсутні шестерні зворотнього зв'язку 17 - 20, вал 21 і ведуча шесгерня 3 Наружні сателіти 11,12 всановлені, наприклад, жорстко на осях 9, 10 В останньому фіг 2 співпадає з фіг 1 В третьому примірному виконанні(фіг 3) керуючі шестерні 15, 16 виконані з різними діаметрами, наружні сателіти 29, ЗО виконані з різними діаметрами відносно ЗОВНІШНІХ сателітів 31, 32 В останньому фіг 3 співпадає з фіг 2 В 4-му примірному здійсненні способу регулювання швидкості Золотова(фіг 4) регулятор 1 виконаний з планетарного ряду 1 який обведений пунктирною ЛІНІЄЮ 2, де цифри позначені водило 33, зубчатий венець - 34, соніна шестерня - 35, сателити - 36 В останньому фіг 3 і 4 однакові В п'ятому примірному виконанні регулятора швидкості Золотова(фіг 5) зубчатому ВІНЦІ 34 встановлено гальмоване пристосовування, а регулятор 32 встановлений на ланцюгу керування, наприклад, між керуючими шестернями 25, 26 і виконай на генераторе електричного струму 36 і елекгродвигуном 37 В генераторе електричного струму 36 статор 38 і ротор 39 установлені вільно обертаючі між собою так і вільно обертаючими відносно корпуса 40 транспортного засобу В електродвигуні 37 ротор 41 жорстко з'єднаний з ротором 39, а його корпус 42 нерухомо відносно корпуса 40 транспортного засобу В 6-му примірному виконанні керуючий вал 23 и регулятор 22 з'єднані кінематично з двома колінчатими валами двигуна внутрішнього згорання 43(танковий двигун), а регулятор виконай, наприклад, з гідротрансформатора В іншому фігури 5, 1 однакові між собою(коленчаті вали на фіг 6 не показані ) Засіб регулювання швидкості Золотова працює наступним чином(фіМ) Обертаючий момент подається на ведучий вал 23, котрий через датчик 22 ведучи вал 5 приводить в обертання ведучу шестерню 3, шестерні зворотного зв'язку 17 - 20, котрі в свою чергу обертають керуючу шестерню 16, внутрішні сателіти 7, 8, ведому шестерню 4 і ведомий вал 6, Керуючий вал 23 обертає шестерні зворотнього зв'язку 24 - 27, вал 28, котрий в свою чергу обертає керуючу шестерню 15 Керуючі шестерні 15, 16 обертаються в різні сторони або в одну сторону, наприклад, в одну сторону і завлекають за собою ЗОВНІШНІ сателіти 11, 12, що приводе в обертання відомого валу 6 При зміненні обертаючого моменту або при зміненні кутової швидкості на керуючому валі 23, наприклад, при зміненні обертаючого моменту на керуючому валі змінюється різність кутової швидкості на датчику 22, що помане змінення кутової швидкості на керуючих шестернях 15, 16 При цьому ЗОВНІШНІ сателіти 11, 12 змінюють обертальну швидкість навколо неподвижної осі А-А, що відбуває змінення кутової швидкості на відомому валу 6, рівно добутку різності кутової швидкості з датчика 22 і відомим валом 6, тобто, різності кутової швидкості з датчика 22 посилюється на відомому валу 6, що відбуває регуляції швидкості автомобіля Друге примірне виконання способу регулювання швидкості Золотова(фіг 2) відрізняється від фіг 1 тим, що обертаючий момент керуючого вала 5 подають непосередньо на керуючу шестерню 16, в іншому робота по фігурам 1 і 2 однакові Робота регулювання швидкості Золотова в 3му примірному виконанні відрізняється від 2-го примірного виконання тим, що керуюча різність швидкості з датчика 22 подають на керуючі шестерні 15, 16 з різноманітними передаточними числами В іншому робота по фіг 2 і 3 однакові В 4-му примірному виконанні способу регулювання швидкості Золотова роботу регулятора 1 виконує планетарний ряд 1 (фіг 4), де сонячна шестерня 31 виконує функцію відомої шестерні 4, водило 33 - керуючої шестерні 16, сателіти 36, сателітів 29 - 32, зубчатий венець 34 - керуючої шестерні 15 В останньому робота з фігурами 3 і 4 однакові В 5-му примірному виконанні регулятора швидкості Золотова(фіг 5) обертаюча мить 3 ведучого вала 23 віддають через керуючі шестерні 24, 25, статор 38, ротора 39, 41, керуючі шестерні 26, 27 на зубчатий венець 34 При цьому статор 38 і ротор 39 обертаються в різні сторони відносно корпуса 40 транспорту за рахунок сил відштовхування між статором 38 і ротором 39 Ротор 41 також обертається в сторону обертання ротора 32 за рахунок сил притягання між корпусом 42 і ротором 41 В свою чергу ведучий вал 23 обертає водило 33 Наприклад, зворотний ход виконують наступним чином(фіг5) Водило 33 і зубчатий венець 34 обертаються в одну сторону Направлення обертання ведомого вала 6 залежить від швидкості обертання зубчатого венця 34 відносно водила 33 Якщо кутова швидкість зубчатого венця 34 перевищує кутову швидкість водила 53 більше 2 раза, то ведомий вал 6 обертається в зворотню сторону, чим водило 33 і зубчатий венець 34 Це досягається при розгальмуванні зубчатого венця 34 гальмовим пристосуванням 35 Машина рухається вперед, Щоб одержати задній ход, гальмують зубчатим венцем 34 гальмівним приспособлениям 35 Одночасно зменшують в іншу сторону силу притягання між статором 38 і ротором 39 шляхом змінення полярності електричного струму в електричному двигуні 37, тобто роз'єднують ведучий 59440 вал 33 від зубчатого ланця 34 Відбувається зворотний ход машини Якщо в якості датчика 22 виконують, наприклад, гідротрансформатор, то при зворотньому ході гідротрансформатор виконують як муфту зціплення В останному робота по фіг 4 і 5 однакова В 6-му примірному виконанні на ведучим вал 23 і на датчик 22 обертаючий момент подають з двох коленчатих валів двигуна внутрішнього згорання 43 В останньому робота по фіг 5 і 6 однакова ^/ ГЗ л ОС} П*; ' .27 (---453 / 5 59440 ) I 10 •22 -И—Lr ТЄ Комп'ютерна верстка І Вихованець Підписано до друку 06 10 2003 Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ТОВ "Міжнародний науковий комітет", вул Артема, 77, м Київ, 04050, Україна
ДивитисяДодаткова інформація
Назва патенту англійськоюZolotov method for speed control
Назва патенту російськоюСпособ регулировки скорости золотова
МПК / Мітки
МПК: F16H 59/44, F16H 59/14, B60K 17/00
Мітки: регулювання, спосіб, золотова, швидкості
Код посилання
<a href="https://ua.patents.su/5-59440-sposib-regulyuvannya-shvidkosti-zolotova.html" target="_blank" rel="follow" title="База патентів України">Спосіб регулювання швидкості золотова</a>
Спосіб регулювання швидкості по відхиленню і регулятор швидкості для його здійснення
Номер патенту: 51957
Опубліковано: 16.12.2002
Автор: Сільченко Едуард Євгенович
МПК: H02P 5/00
Мітки: регулювання, спосіб, швидкості, регулятор, відхиленню, здійснення
Формула / Реферат:
1. Спосіб регулювання швидкості по відхиленню, де відхилення є різницею сигналів завдання на швидкість і зворотного зв’язку по швидкості, який відрізняється тим, що величину відхилення додатково зменшують на величину, рівну прогнозованій зміні швидкості при динаміці електропривода, яку спостерігають.2. Спосіб за п. 1, який відрізняється тим, що прогнозована зміна швидкості визначається за формулою:
Спосіб автоматичного регулювання кутової швидкості та пристрій для його здійснення
Номер патенту: 34183
Опубліковано: 15.02.2001
Автор: Ключковський Сергій Миронович
МПК: G05D 13/00
Мітки: автоматичного, пристрій, регулювання, кутової, спосіб, швидкості, здійснення
Текст:
...і сили акумулятора, то при зміні однієї з них, а саме - відцентрової сили, рівновага порушується і ланки здійснюють рух, змінюючи при цьому динамічний момент інерції системи. Наслідком зміни останнього є виникнення на валу крутного моменту, який запобігає подальшому відхиленню швидкості. Таким чином, відбувається автоматична зміна потоку рушійної енергії в регульованій системі, джерелом якої є акумулятор механічної енергії. Пристрій для...
Спосіб автоматичного регулювання кутової швидкості електропривода
Номер патенту: 59878
Опубліковано: 15.09.2003
Автори: Збруцький Олександр Васильович, ТРОНЬ ЮРІЙ ОПАНАСОВИЧ, Прохорчук Олександр Віталійович
МПК: H02P 5/00
Мітки: автоматичного, кутової, регулювання, спосіб, швидкості, електропривода
Формула / Реферат:
Спосіб автоматичного регулювання кутової швидкості електропривода, який полягає в тому, що формують задавальний сигнал, вимірюють сигнал, пропорційний значенню кутової швидкості електропривода, задавальний сигнал порівнюють із сигналом, пропорційним кутовій швидкості електропривода, результат порівняння алгебраїчно підсумовують із сигналом, пропорційним моменту навантаження, і формують сигнал керування електроприводом пропорційно отриманій...
Пристрій для регулювання швидкості обертання однофазного конденсаторного електродвигуна
Номер патенту: 46848
Опубліковано: 17.06.2002
Автори: Мішин Володимир Іванович, Соловей Іван Михайлович
МПК: H02P 1/16, H02K 17/08
Мітки: електродвигуна, однофазного, конденсаторного, обертання, регулювання, швидкості, пристрій
Формула / Реферат:
Пристрій для регулювання швидкості обертання однофазного конденсаторного електродвигуна, який включає асинхронний однофазний конденсаторний електродвигун, силову схему на чотирьох симісторах, батарею конденсаторів і блок керування, який відрізняється тим, що симістори з‘єднані зустрічно, при цьому аноди двох симісторів з‘єднані між собою в один вивід, який подається на фазу мережі, аноди двох інших на "0", а до середніх точок...
Пристрій для регулювання швидкості лінії безперервної вулканізації
Номер патенту: 36025
Опубліковано: 16.04.2001
Автори: Семікіна Лариса Феодосіївна, Коржик Михайло Володимирович, Жученко Анатолій Іванович
МПК: B29C 47/02, G05D 13/00, B29C 47/00
Мітки: лінії, пристрій, безперервної, вулканізації, швидкості, регулювання
Текст:
...вулканізації виробу здійснюється шляхом зменшення необхідного ступеню вулканізації на 15-20%. Крім того, в прототипі не враховується нестаціонарність початкового розподілу температур в профілі виробу. Зазначені чинники ведуть до значного зниження точності визначення тривалості вулканізації, наслідком чого є низька продуктивність лінії і навіть втрата якості готового виробу. В основу винаходу покладено задачу вдосконалення пристрою для...
Попередній патент: Спосіб одержання складу “вострен” для відновлення тертьових поверхонь пар тертя
Наступний патент: Енергоперетворювач щедролосєва
Випадковий патент: Спосіб виробництва пасти з дикорослої сировини