Захоплюючий пристрій


Формула / Реферат
1. Захоплюючий пристрій (1) з множиною захоплювачів (5), які розташовані в першій позиції з першим заданим кроком (А) між ними, що має привідний пристрій (7) для переміщення захоплювачів (5) щонайменше в одну другу позицію, в якій захоплювачі (5) розташовані із другим заданим кроком (В) між ними, привід (7) має механічний передавальний вузол (9), який містить важільний механізм до захоплювачів (5), а передавальний вузол (9) для кожного захоплювача (5.1-5.6) містить щонайменше одну ланку (9.1-9.6), на якій захоплювачі (5.1-5.6) підвішені для здійснення повороту, при цьому привід впливає на ланку (9.3) одного із захоплювачів (5.2), а ланка (9.2, 9.5) щонайменше одного з інших захоплювачів з'єднана за допомогою з'єднувального елемента (10.1, 10.2) з веденою ланкою (9.3), який відрізняється тим, що кожна ланка (9.1-9.6) має перший шарнір (11) на рамі (4), і привідний пристрій (7) містить передавальну ланку (10) для переміщення двох суміжних захоплювачів (5) за траєкторією (W) різної довжини, де для фіксування траєкторій (W) різної довжини з'єднувальні елементи (10.1, 10.2) з'єднані за допомогою шарнірів (13, 14) із ланкою (9.2, 9.5) іншого захоплювача (5.1, 5.3), що має крок (х, у) до першого шарніра (11) ланки (9.1-9.6).
2. Захоплюючий пристрій (1) за п. 1, який відрізняється тим, що множина захоплювачів (5) розташована на тримачі (6) групами (5.1, 5.2, 5.3, 5.4, 5.5, 5.6) із фіксованим кроком (а, b) між ними, і тримачі (6.1, 6.2, 6.3, 6.4, 6.5, 6.6) мають можливість переміщення за допомогою привода (7).
3. Захоплюючий пристрій (1) за п. 2, який відрізняється тим, що захоплювачі (5) розташовані щонайменше в один ряд і що захоплювачі (5) мають можливість переміщення разом у ряді.
4. Захоплюючий пристрій (1) за одним із пп. 1-3, який відрізняється тим, що він виконаний у формі захоплюючої головки з рамою (4), множина тримачів (6) встановлена на рамі (4) з перемінною відстанню між ними, на якій у кожному разі група (5.1-5.6) захоплювачів (5) розташована з фіксованим кроком (а, b) між ними, і привідний пристрій (7) з механічним передавальним пристроєм (9, 10) щонайменше на одному тримачі (6) для зміни кроку (А, В) між тримачами (6).
5. Захоплюючий пристрій (1) за одним із пп. 2-4, який відрізняється тим, що передавальний вузол (9) для кожної групи захоплювачів (5.1-5.6) містить щонайменше одну ланку (9.1-9.6), на якій підвішена відповідна група захоплювачів (5.1-5.6) для здійснення повороту, при цьому пристрій впливає на ланку (9.3) однієї з груп захоплювачів (5.2), а ланка (9.2, 9.5) щонайменше однієї іншої групи захоплювачів (5.1, 5.3) з'єднана за допомогою з'єднувального елемента (10.1, 10.2) із веденою ланкою (9.3).
Текст
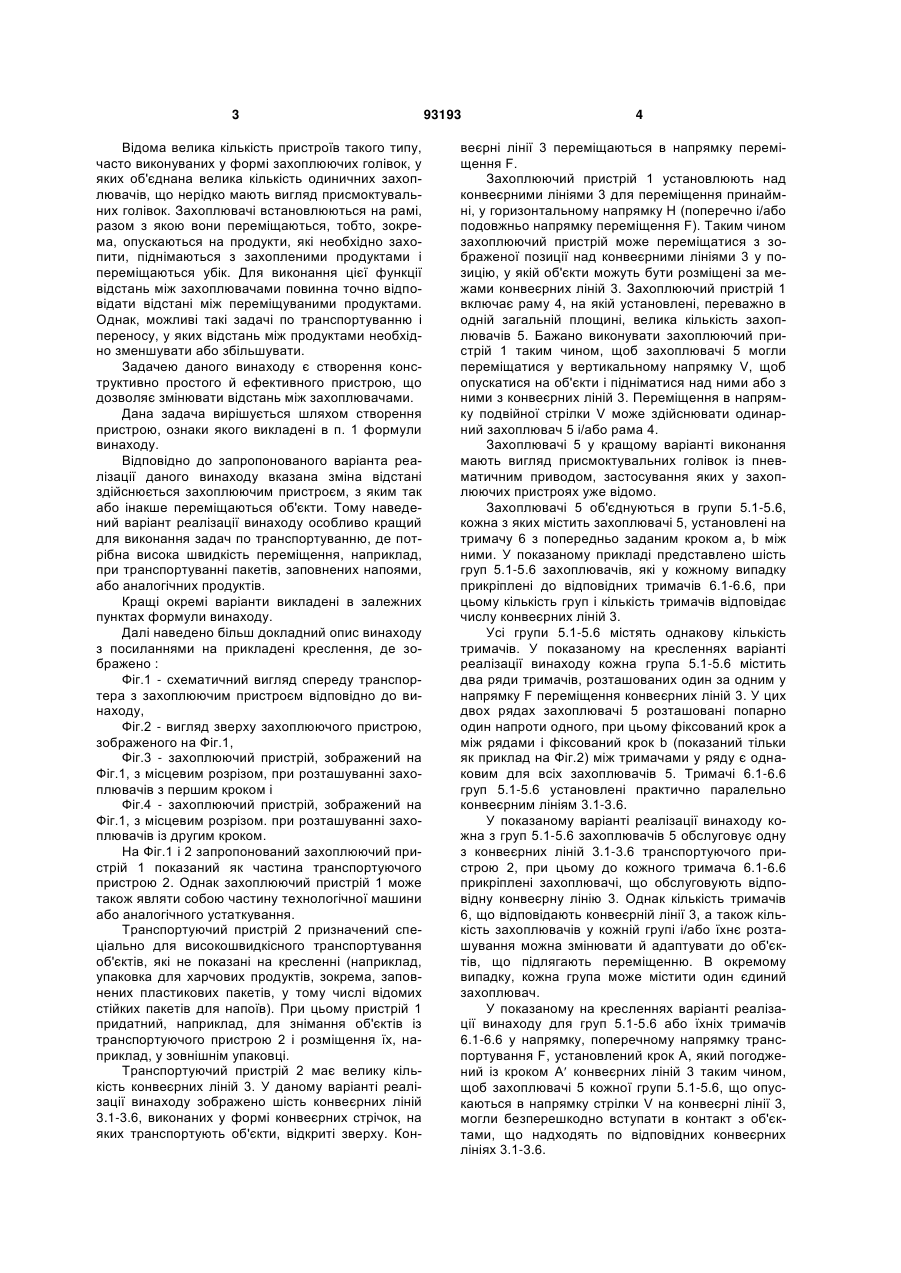
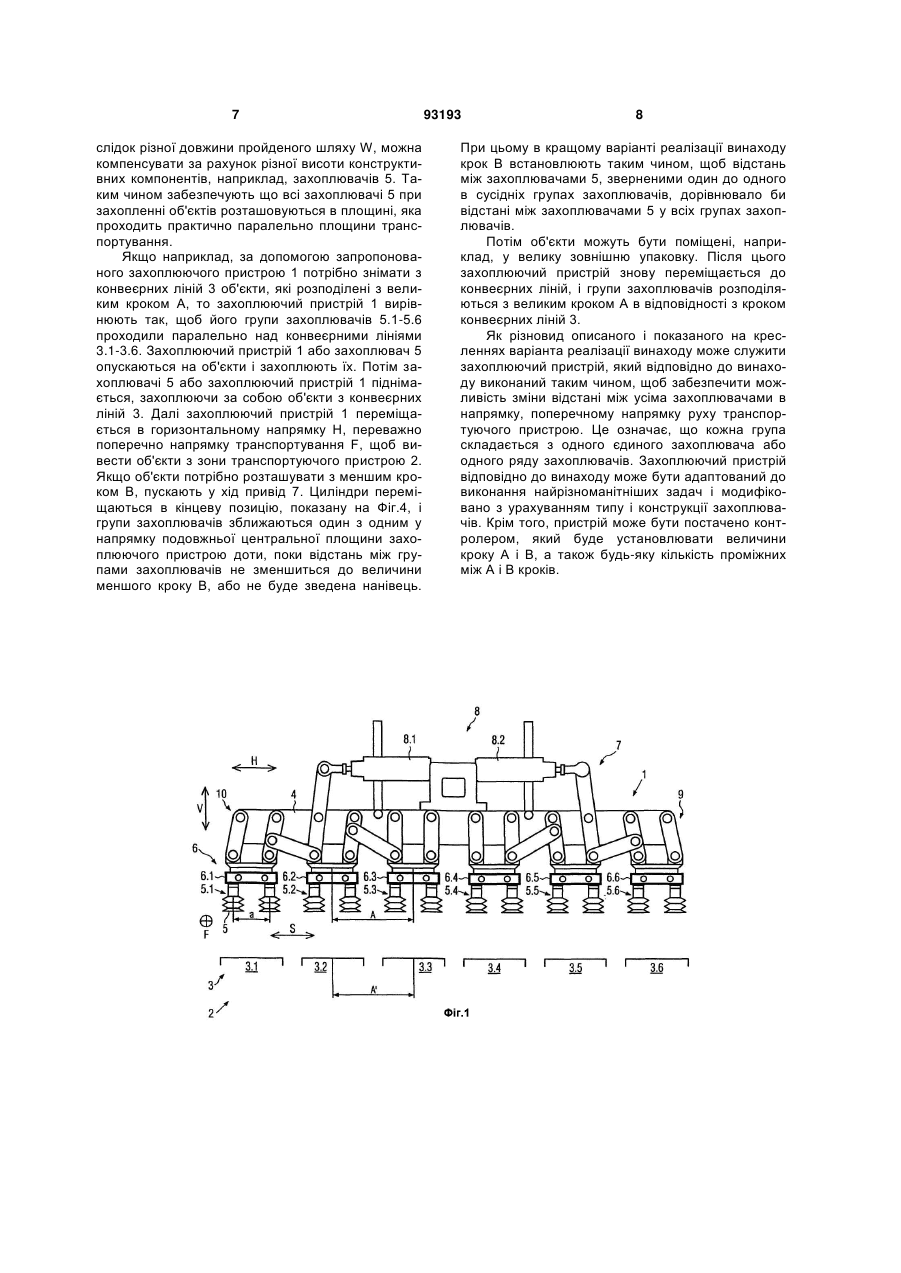
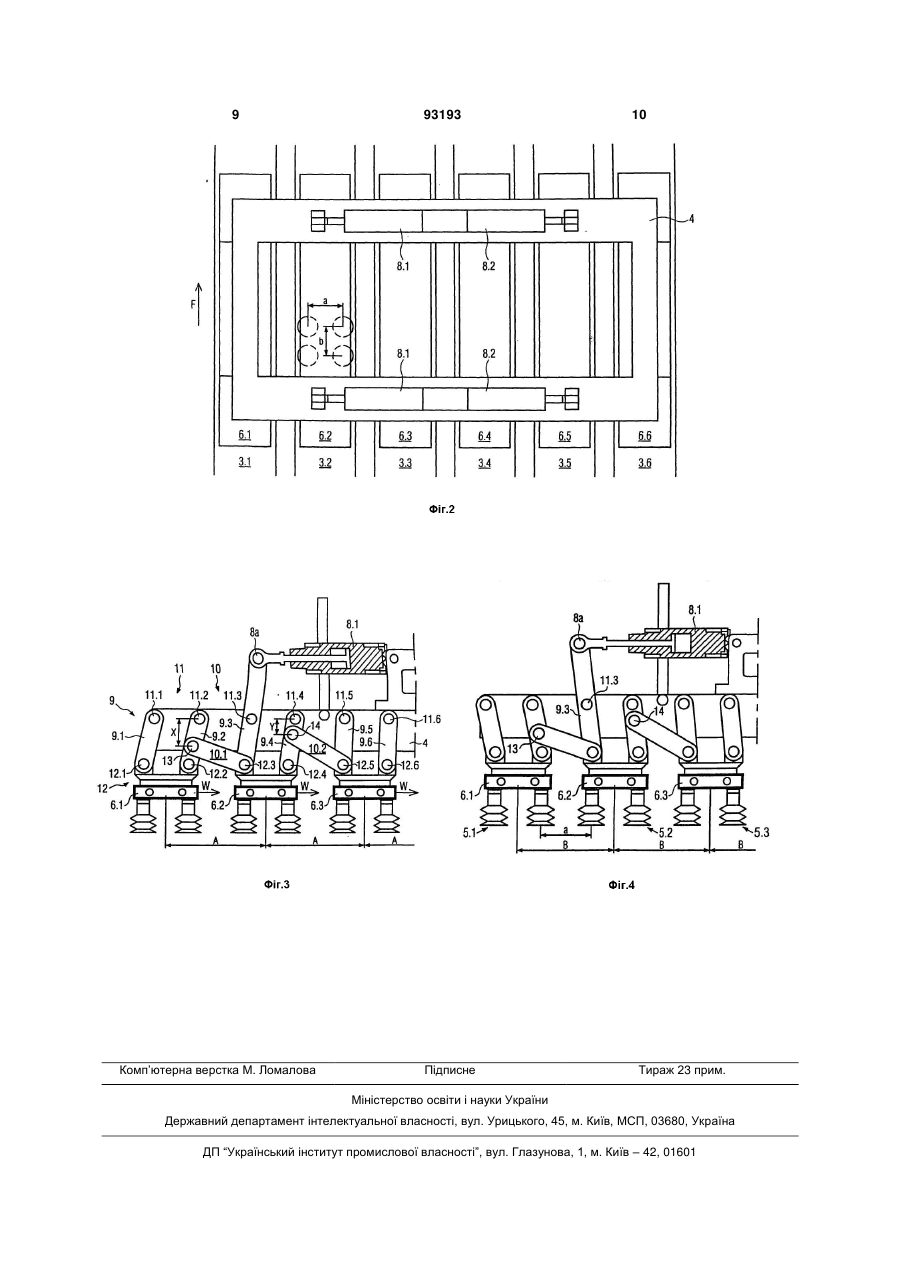
1. Захоплюючий пристрій (1) з множиною захоплювачів (5), які розташовані в першій позиції з першим заданим кроком (А) між ними, що має привідний пристрій (7) для переміщення захоплювачів (5) щонайменше в одну другу позицію, в якій захоплювачі (5) розташовані із другим заданим кроком (В) між ними, привід (7) має механічний передавальний вузол (9), який містить важільний механізм до захоплювачів (5), а передавальний вузол (9) для кожного захоплювача (5.1-5.6) містить щонайменше одну ланку (9.1-9.6), на якій захоплювачі (5.1-5.6) підвішені для здійснення повороту, при цьому привід впливає на ланку (9.3) одного із захоплювачів (5.2), а ланка (9.2, 9.5) щонайменше одного з інших захоплювачів з'єднана за допомогою з'єднувального елемента (10.1, 10.2) з веденою ланкою (9.3), який відрізняється тим, що кожна ланка (9.1-9.6) має перший шарнір (11) на рамі (4), і привідний пристрій (7) містить пере C2 2 (19) 1 3 Відома велика кількість пристроїв такого типу, часто виконуваних у формі захоплюючих голівок, у яких об'єднана велика кількість одиничних захоплювачів, що нерідко мають вигляд присмоктувальних голівок. Захоплювачі встановлюються на рамі, разом з якою вони переміщаються, тобто, зокрема, опускаються на продукти, які необхідно захопити, піднімаються з захопленими продуктами і переміщаються убік. Для виконання цієї функції відстань між захоплювачами повинна точно відповідати відстані між переміщуваними продуктами. Однак, можливі такі задачі по транспортуванню і переносу, у яких відстань між продуктами необхідно зменшувати або збільшувати. Задачею даного винаходу є створення конструктивно простого й ефективного пристрою, що дозволяє змінювати відстань між захоплювачами. Дана задача вирішується шляхом створення пристрою, ознаки якого викладені в п. 1 формули винаходу. Відповідно до запропонованого варіанта реалізації даного винаходу вказана зміна відстані здійснюється захоплюючим пристроєм, з яким так або інакше переміщаються об'єкти. Тому наведений варіант реалізації винаходу особливо кращий для виконання задач по транспортуванню, де потрібна висока швидкість переміщення, наприклад, при транспортуванні пакетів, заповнених напоями, або аналогічних продуктів. Кращі окремі варіанти викладені в залежних пунктах формули винаходу. Далі наведено більш докладний опис винаходу з посиланнями на прикладені креслення, де зображено : Фіг.1 - схематичний вигляд спереду транспортера з захоплюючим пристроєм відповідно до винаходу, Фіг.2 - вигляд зверху захоплюючого пристрою, зображеного на Фіг.1, Фіг.3 - захоплюючий пристрій, зображений на Фіг.1, з місцевим розрізом, при розташуванні захоплювачів з першим кроком і Фіг.4 - захоплюючий пристрій, зображений на Фіг.1, з місцевим розрізом. при розташуванні захоплювачів із другим кроком. На Фіг.1 і 2 запропонований захоплюючий пристрій 1 показаний як частина транспортуючого пристрою 2. Однак захоплюючий пристрій 1 може також являти собою частину технологічної машини або аналогічного устаткування. Транспортуючий пристрій 2 призначений спеціально для високошвидкісного транспортування об'єктів, які не показані на кресленні (наприклад, упаковка для харчових продуктів, зокрема, заповнених пластикових пакетів, у тому числі відомих стійких пакетів для напоїв). При цьому пристрій 1 придатний, наприклад, для знімання об'єктів із транспортуючого пристрою 2 і розміщення їх, наприклад, у зовнішнім упаковці. Транспортуючий пристрій 2 має велику кількість конвеєрних ліній 3. У даному варіанті реалізації винаходу зображено шість конвеєрних ліній 3.1-3.6, виконаних у формі конвеєрних стрічок, на яких транспортують об'єкти, відкриті зверху. Кон 93193 4 веєрні лінії 3 переміщаються в напрямку переміщення F. Захоплюючий пристрій 1 установлюють над конвеєрними лініями 3 для переміщення принаймні, у горизонтальному напрямку Н (поперечно і/або подовжньо напрямку переміщення F). Таким чином захоплюючий пристрій може переміщатися з зображеної позиції над конвеєрними лініями 3 у позицію, у якій об'єкти можуть бути розміщені за межами конвеєрних ліній 3. Захоплюючий пристрій 1 включає раму 4, на якій установлені, переважно в одній загальній площині, велика кількість захоплювачів 5. Бажано виконувати захоплюючий пристрій 1 таким чином, щоб захоплювачі 5 могли переміщатися у вертикальному напрямку V, щоб опускатися на об'єкти і підніматися над ними або з ними з конвеєрних ліній 3. Переміщення в напрямку подвійної стрілки V може здійснювати одинарний захоплювач 5 і/або рама 4. Захоплювачі 5 у кращому варіанті виконання мають вигляд присмоктувальних голівок із пневматичним приводом, застосування яких у захоплюючих пристроях уже відомо. Захоплювачі 5 об'єднуються в групи 5.1-5.6, кожна з яких містить захоплювачі 5, установлені на тримачу 6 з попередньо заданим кроком a, b між ними. У показаному прикладі представлено шість груп 5.1-5.6 захоплювачів, які у кожному випадку прикріплені до відповідних тримачів 6.1-6.6, при цьому кількість груп і кількість тримачів відповідає числу конвеєрних ліній 3. Усі групи 5.1-5.6 містять однакову кількість тримачів. У показаному на кресленнях варіанті реалізації винаходу кожна група 5.1-5.6 містить два ряди тримачів, розташованих один за одним у напрямку F переміщення конвеєрних ліній 3. У цих двох рядах захоплювачі 5 розташовані попарно один напроти одного, при цьому фіксований крок а між рядами і фіксований крок b (показаний тільки як приклад на Фіг.2) між тримачами у ряду є однаковим для всіх захоплювачів 5. Тримачі 6.1-6.6 груп 5.1-5.6 установлені практично паралельно конвеєрним лініям 3.1-3.6. У показаному варіанті реалізації винаходу кожна з груп 5.1-5.6 захоплювачів 5 обслуговує одну з конвеєрних ліній 3.1-3.6 транспортуючого пристрою 2, при цьому до кожного тримача 6.1-6.6 прикріплені захоплювачі, що обслуговують відповідну конвеєрну лінію 3. Однак кількість тримачів 6, що відповідають конвеєрній лінії 3, а також кількість захоплювачів у кожній групі і/або їхнє розташування можна змінювати й адаптувати до об'єктів, що підлягають переміщенню. В окремому випадку, кожна група може містити один єдиний захоплювач. У показаному на кресленнях варіанті реалізації винаходу для груп 5.1-5.6 або їхніх тримачів 6.1-6.6 у напрямку, поперечному напрямку транспортування F, установлений крок А, який погоджений із кроком А конвеєрних ліній 3 таким чином, щоб захоплювачі 5 кожної групи 5.1-5.6, що опускаються в напрямку стрілки V на конвеєрні лінії 3, могли безперешкодно вступати в контакт з об'єктами, що надходять по відповідних конвеєрних лініях 3.1-3.6. 5 Запропонований захоплюючий пристрій 1 дозволяє змінювати відстань між групами в напрямку, поперечному напрямку транспортування F. Зміна відстані здійснюється завдяки приводу 7, за допомогою якого захоплювачі 5 переміщаються відносно рами 4, так що відстань між групами 5.15.6 зменшується або збільшується. У показаному варіанті реалізації винаходу відстань варіюється за допомогою приводу 7, який щонайменше частково механізований. Привід 7 містить циліндри 8, зокрема, пневматичні циліндри, а також містить механічний передавальний вузол 9, який у кращому варіанті є на кожному із тримачів 6. За допомогою механічних вузлів 9 групи захоплювачів 5.1-5.6 або їх тримачі 6.1-6.6 можна зводити або розводити в напрямку подвійної стрілки S відносно рами 4. Можна також виконати один із тримачів зафіксованим на рамі 4, і переміщати решту тримачів, наближаючи їх до зафіксованого тримача або віддаляючи від нього. У показаному варіанті реалізації винаходу тримачі 6 об'єднані у групи, які переміщаються загальними приводними засобами (у даному випадку пневматичними циліндрами і передавальними вузлами). Таким чином, тримачі 6.1-6.3 переміщаються спільно одним або декількома першими пневматичними циліндрами 8.1, а тримачі 6.4-6.6 переміщаються спільно одним або декількома другими пневматичними циліндрами 8.2. Передавальний вузол 9 забезпечує переміщення групи захоплювачів 5.1-5.6 або їхніх тримачів 6.1-6.6 у всіх випадках на попередньо задану величину W переміщення, яка може варіюватися для різних груп тримачів, і яка фактично може бути такою, що як більший крок А, також і менший крок В у кожному випадку є однаковими для усіх тримачів 6 або груп захоплювачів. У показаному варіанті реалізації винаходу передавальний вузол 9 містить передавальну ланку 10, яка забезпечує різні траєкторії W. Передавальний вузол 9 виконаний у виді важільного механізму, який включає щонайменше одну ланку, переважно дві ланки на один тримача 6. Для наочності на Фіг.3 і 4 показана тільки половина захоплюючого пристрою 1, до якого відносяться наведені далі пояснення. При цьому на підставі Фіг.1 і 2 легко представити, що друга половина виконана ідентично першій і є її дзеркальним відображенням. Кожному тримачу 6 відповідає одна ланка, переважно дві ланки 9.1, 9.2, 9.3, 9.4, 9.5 і 9.6 передавального вузла 9. Ланки 9.1-9.6 у кожному випадку з'єднані з відповідним першим шарніром 11 на рамі 4 і другим шарніром 12 на тримачі 6. Пари ланок 9.1 і 9.2, 9.3 і 9.4, 9.5 і 9.6, зв'язані з відповідним тримачем 6, розташовані паралельно одна одній. Усі ланки 9.1-9.6 мають однакову довжину. Відстань між шарнірами 11 або 12 відповідних тримачів 6 є однаковою для усіх тримачів 6. Таким чином, кожний із тримачів 6 усіх груп захоплювачів може повертатися навколо шарнірів 11, 12 відповідних ланок, переміщуючись, відповідно, у паралельному напрямку. У показаному на кресленнях варіанті реалізації винаходу пневматичний циліндр 8.1 приводу 7 з'єднаний з центральним тримачем 6.2. Це з'єд 93193 6 нання здійснюють шляхом подовження одної з ланок, а, саме, ланки 9.3, за шарнір 11.3 на рамі 4, так що ланка 9.3 утворює двоплечий важіль. Пневматичиний цилиндр 8.1 за допомогою шарніра 8а приєднаний до ланки 9.3 і повертає її навколо шарніра 11.3 для безпосереднього привода повороту центрального тримача 6.2. Безпосередньо відомий тримач 6.2 з'єднаний із двома іншими тримачами 6.1 і 6.3 для передачі руху. Таким чином, пневматичний циліндр 8.1 може повертати всі три тримача 6.1, 6.2 і 6.3. З'єднання здійснене за допомогою з'єднувальних елементів 10.1 і 10.2 передавальної ланки 10. З'єднувальний елемент 10.1 з'єднує відомий тримач 6.2 з іншим сусіднім тримачем, а саме з бічним тримачем 6.1, у той час як з'єднувальний елемент 10.2 з'єднує відомий тримач 6.2 з іншим сусіднім тримачем 6.3. При цьому з'єднувальний елемент 10.1 з'єднаний із шарніром 12.3 тримача 6.2 і зі своїм власним шарніром 13, який розміщений на приєднаній ланці 9.2 сусіднього тримача 6.1. З'єднувальний елемент 10.2 може провертатися в шарнірі 12.5 іншого сусіднього тримача 6.3, а для забезпечення повороту з'єднаний зі своїм власним шарніром 14, який розміщений на сусідній ланці 9.4. Положення шарнірів 13 і 14 відносно шарнірів 11.2 або 11.4 відповідно переміщувальних ланок 9.2 і 9.4, визначає величину W переміщення відповідного приєднаного тримача, коли пневматичний циліндр 8.1 переміщає відомий тримач. У показаному на кресленнях варіанті реалізації винаходу шарнір 13 з'єднувального елемента 10.1 на ланці 9.2 розташований на відстані х від шарніра 11.2 ланки 9.2, а шарнір 14 з'єднувального елемента 10.2 на ланці 9.4 розташований на відстані у від шарніра 11.4 ланки 9.4. Відстань х перевищує відстань у, тому для повороту двох ланок 9.3 і 9.4 на однаковий кут шарнір 13 повинний проходити більший шлях відносно шарніра 11.2, ніж шарнір 14 відносно шарніра 11.4. Це означає, що тримач 6.1 переміщається більше, ніж тримач 6.2, а тримач 6.3 переміщається менше, ніж тримач 6.2. Для того, щоб крок В між усіма тримачами 6.1, 6.2 і 6.3 після повороту залишався постійним, необхідно, щоб при постійному кроці А величини переміщення тримачів 6.1, 6.2 і 6.3 співвідносилися б як 5:3:1.Таким чином, якщо переміщення тримача 6.3 (половина різниці між А і В) дорівнює 1, то центральний тримач 6.2 повинний переміщатися в три рази далі, а бічний тримач 6.1 - у 5 разів далі, коли пневматичний циліндр 8.1 переміщається з правого крайнього положення, показаного на Фіг.3, у ліве крайнє положення, показане на Фіг.4. Кінцеві позиції циліндрів 8 і передавального вузла 9 з передавальною ланкою 10 повинні бути узгоджені таким чином, щоб тримачі 6.1-6.3 переключалися між кроком А і кроком В симетрично відносно своєї нульової позиції, обумовленою силою ваги, тому тримачі 6 при кроці А і кроці В знаходяться на однаковій відстані по вертикалі від конвеєрних ліній 3. Як показано на Фіг.3 і 4, це забезпечується за рахунок установлення великого первісного відхилення змінної величини. Розходження відстаней по вертикалі, що виникає вна 7 слідок різної довжини пройденого шляху W, можна компенсувати за рахунок різної висоти конструктивних компонентів, наприклад, захоплювачів 5. Таким чином забезпечують що всі захоплювачі 5 при захопленні об'єктів розташовуються в площині, яка проходить практично паралельно площини транспортування. Якщо наприклад, за допомогою запропонованого захоплюючого пристрою 1 потрібно знімати з конвеєрних ліній 3 об'єкти, які розподілені з великим кроком А, то захоплюючий пристрій 1 вирівнюють так, щоб його групи захоплювачів 5.1-5.6 проходили паралельно над конвеєрними лініями 3.1-3.6. Захоплюючий пристрій 1 або захоплювач 5 опускаються на об'єкти і захоплюють їх. Потім захоплювачі 5 або захоплюючий пристрій 1 піднімається, захоплюючи за собою об'єкти з конвеєрних ліній 3. Далі захоплюючий пристрій 1 переміщається в горизонтальному напрямку Н, переважно поперечно напрямку транспортування F, щоб вивести об'єкти з зони транспортуючого пристрою 2. Якщо об'єкти потрібно розташувати з меншим кроком В, пускають у хід привід 7. Циліндри переміщаються в кінцеву позицію, показану на Фіг.4, і групи захоплювачів зближаються один з одним у напрямку подовжньої центральної площини захоплюючого пристрою доти, поки відстань між групами захоплювачів не зменшиться до величини меншого крокуВ, або не буде зведена нанівець. 93193 8 При цьому в кращому варіанті реалізації винаходу крок В встановлюють таким чином, щоб відстань між захоплювачами 5, зверненими один до одного в сусідніх групах захоплювачів, дорівнювало би відстані між захоплювачами 5 у всіх групах захоплювачів. Потім об'єкти можуть бути поміщені, наприклад, у велику зовнішню упаковку. Після цього захоплюючий пристрій знову переміщається до конвеєрних ліній, і групи захоплювачів розподіляються з великим кроком А в відповідності з кроком конвеєрних ліній 3. Як різновид описаного і показаного на кресленнях варіанта реалізації винаходу може служити захоплюючий пристрій, який відповідно до винаходу виконаний таким чином, щоб забезпечити можливість зміни відстані між усіма захоплювачами в напрямку, поперечному напрямку руху транспортуючого пристрою. Це означає, що кожна група складається з одного єдиного захоплювача або одного ряду захоплювачів. Захоплюючий пристрій відповідно до винаходу може бути адаптований до виконання найрізноманітніших задач і модифіковано з урахуванням типу і конструкції захоплювачів. Крім того, пристрій може бути постачено контролером, який буде установлювати величини кроку А і В, а також будь-яку кількість проміжних між А і В кроків. 9 Комп’ютерна верстка М. Ломалова 93193 Підписне 10 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюGripper device
Автори англійськоюWild Hans-Peter, Kraft Eberhard, Lechert Frank
Назва патенту російськоюЗахватное устройство
Автори російськоюВилд Ханс-Петер, Крафт Эберхард, Лехерт Франк
МПК / Мітки
МПК: B65G 47/91, B65G 47/90
Мітки: захоплюючий, пристрій
Код посилання
<a href="https://ua.patents.su/5-93193-zakhoplyuyuchijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Захоплюючий пристрій</a>
Захоплюючий пристрій

Номер патенту: 15565
Опубліковано: 17.07.2006
Автори: Філяк Михайло Йосипович, Гук Зіновій Васильович
МПК: B66C 1/62
Мітки: захоплюючий, пристрій
Формула / Реферат:
1. Захоплюючий пристрій, що містить верхню скобу і циліндричний корпус, який відрізняється тим, що в нижній відносно скоби частині корпус виконаний з наскрізним пазом, нахиленим до осі корпусу з верхнім розташуванням входу в паз, вхід в паз перекритий С-подібною нахиленою касетою з розташуванням входу в касету на стику з пазом, просвіт С-подібної касети в профіль відповідає просвіту паза, в якому в поперечній до осі корпусу площині вільно...
Самовідчіпний захоплюючий пристрій
Номер патенту: 24767
Опубліковано: 10.07.2007
Автор: Боратинський Олег Володимирович
МПК: B66C 1/22
Мітки: захоплюючий, самовідчіпний, пристрій
Формула / Реферат:
Самовідчіпний захоплюючий пристрій, який містить корпус з вирізом, шарнірно встановлену вантажозахоплюючу скобу, вушко для під'єднання до вантажопідіймального механізму з можливістю зворотно-поступального руху, поворотний фіксатор у вигляді двоплечого важеля, одне плече якого взаємодіє з носком скоби, пружину, який відрізняється тим, що, з метою підвищення надійності в роботі, вантажозахоплююча скоба змонтована на підпружиненому штоці, в пазі...
Гвинтовий захоплюючий патрон промислового робота

Номер патенту: 50936
Опубліковано: 25.06.2010
Автори: Ляшук Олег Леонтійович, Гевко Ігор Богданович, Скиба Олена Павлівна, Дячун Андрій Євгенович, Палюх Андрій Ярославович
МПК: F16B 2/20
Мітки: промислового, захоплюючий, робота, патрон, гвинтовий
Формула / Реферат:
Гвинтовий захоплюючий патрон промислового робота, що виконаний у вигляді корпуса поворотного диска з тягою, яка з'єднана з гвинтовим пружним затискним елементом який виконано у вигляді гвинта з горизонтальною ребровою частиною, яка по зовнішньому діаметру сформована у нахилену спіраль під кутом до ребрової горизонтальної частини, приводу, установчих і кріпильних елементів, який відрізняється тим, що привід жорстко під'єднаний до рухомого...
Захоплюючий пристрій для контейнерів
Номер патенту: 3831
Опубліковано: 27.12.1994
Автор: Кавецький Іларіон Йосипович
МПК: B66C 1/62
Мітки: захоплюючий, контейнерів, пристрій
Формула / Реферат:
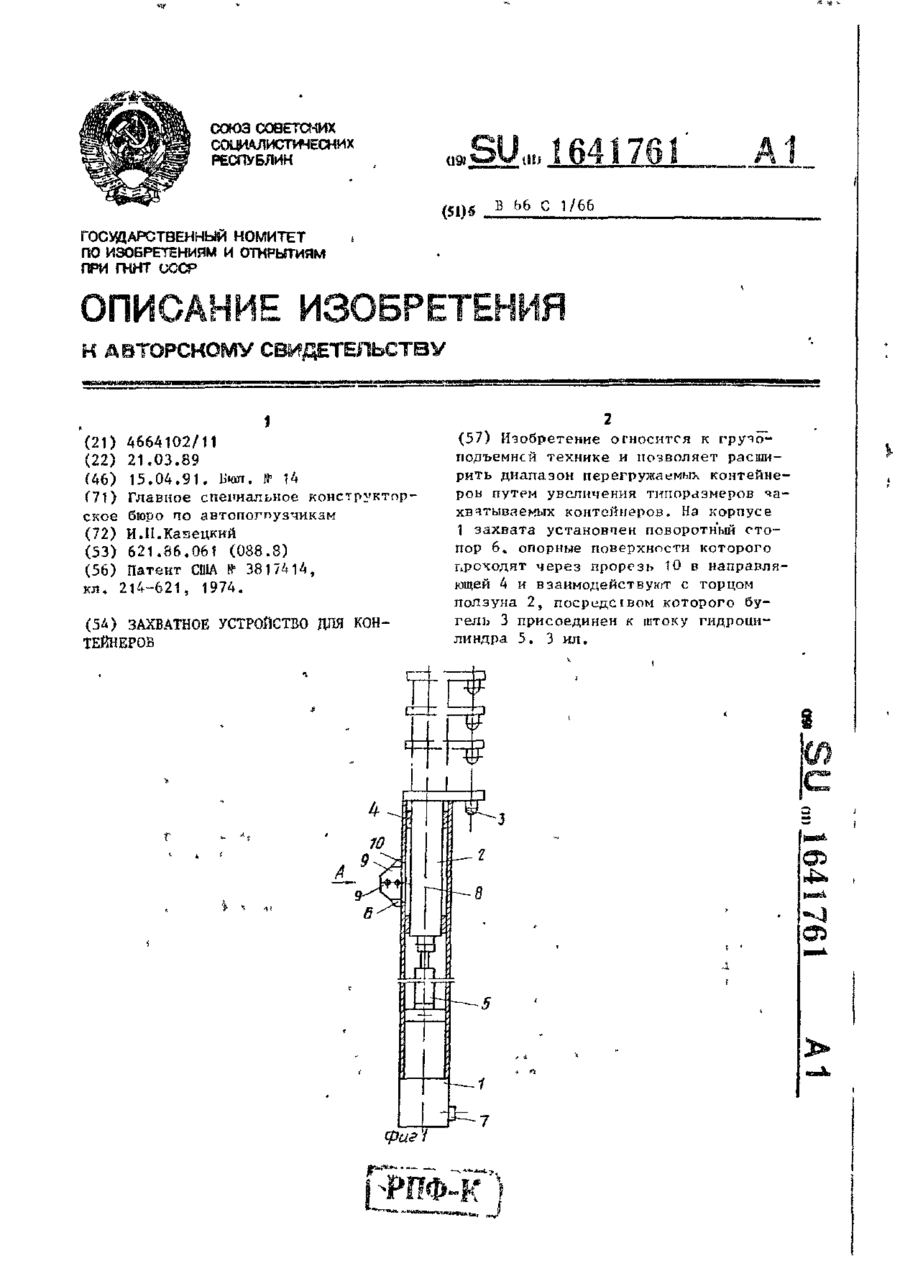
Захватное устройство для контейнеров, содержащее полый корпус, закрепленный на его наружной поверхности опорный палец для взаимодействия с нижним фитингом контейнера, установленный на корпусе с возможностью перемещения по вертикали бугель для взаимодействия с верхним фитингом и расположенный внутри корпуса силовой цилиндр двустороннего действия для перемещения бугеля, отличающееся тем, что, с целью расширения эксплуатационных...
Вантажозахоплювальний пристрій
Номер патенту: 35310
Опубліковано: 10.09.2008
Автори: Лафазан Андрій Олександрович, Шабалдак Микола Васильович, Зусін Михайло Абрамович
МПК: B66C 1/22
Мітки: вантажозахоплювальний, пристрій
Формула / Реферат:
1. Вантажозахоплювальний пристрій, який містить траверсу з закріпленими на ній тягами, на якій рівномірно установлені С-подібні захоплювачі, який відрізняється тим, що С-подібні захоплювачі виконані з щік, в нижній частині яких з можливістю повороту на осях установлені відкидні ложементи, що спираються на опорні планки і фіксуються за допомогою упорів, установлених між щік С-подібних захоплювачів.2. Вантажозахоплювальний пристрій за п....
Попередній патент: Спосіб підвищення врожайності кукурудзяних рослин (варіанти)
Наступний патент: Спосіб компенсації зношення інструмента (варіанти) і пристрій для його здійснення (варіанти)
Випадковий патент: Спосіб відвалоутворення скельних порід