Спосіб “автотрак” переміщення мобільного засобу конструкції л.м. петрова
Номер патенту: 70709
Опубліковано: 25.06.2012
Автори: Мілованов Валерій Іванович, Древов Денис Васильович, Петров Леонід Миколайович

Формула / Реферат
Спосіб переміщення мобільного засобу, який включає передачу крутного моменту напівгусеничним рушієм та додаванням гусеничному рушію гравітаційної складової, який відрізняється тим, що обертання веденої зірочки пригальмовують до моменту повороту рухомої балки відносно рами на кут відхилення напрямку дії сили тяжіння відносно напрямку дії сили тягового опору.
Текст
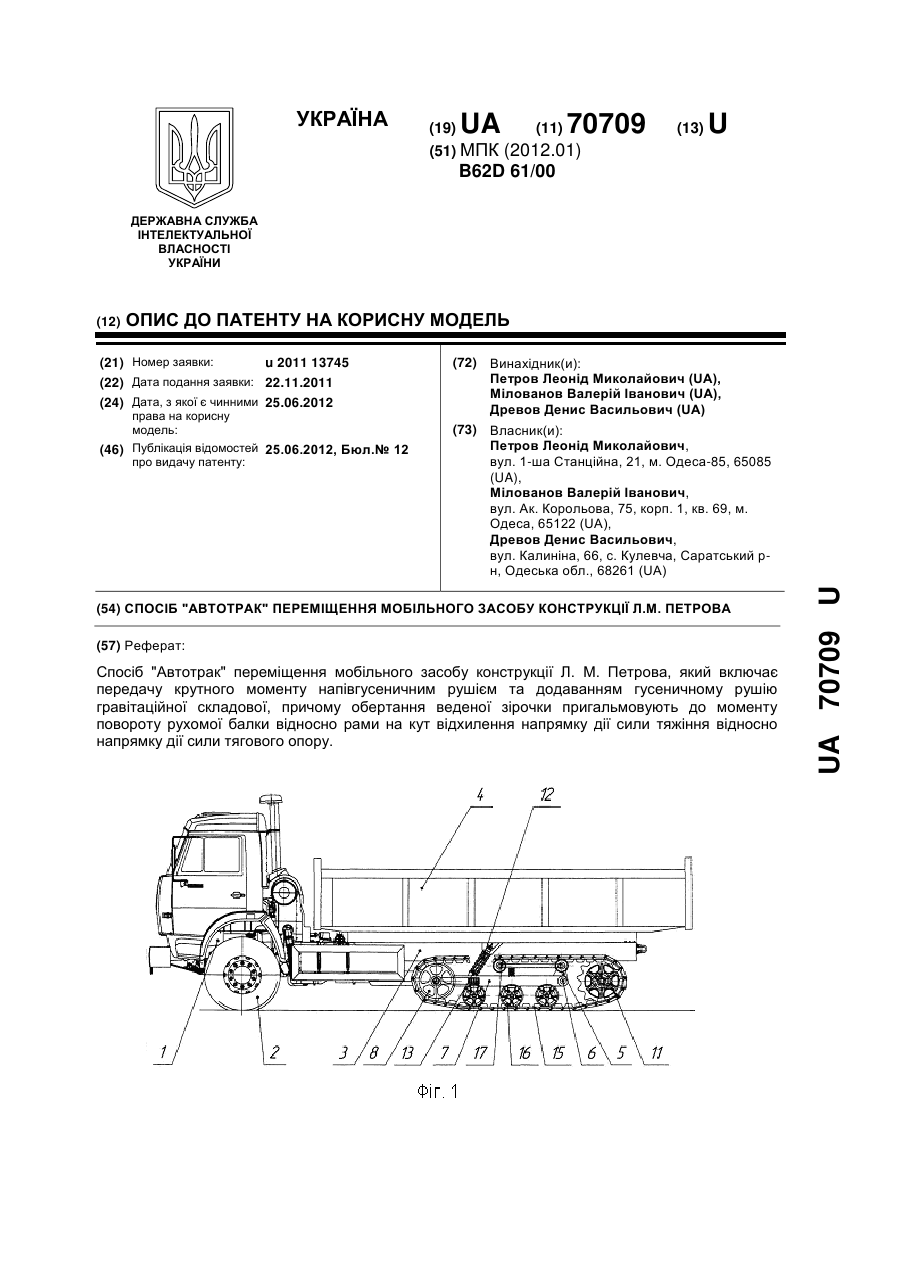
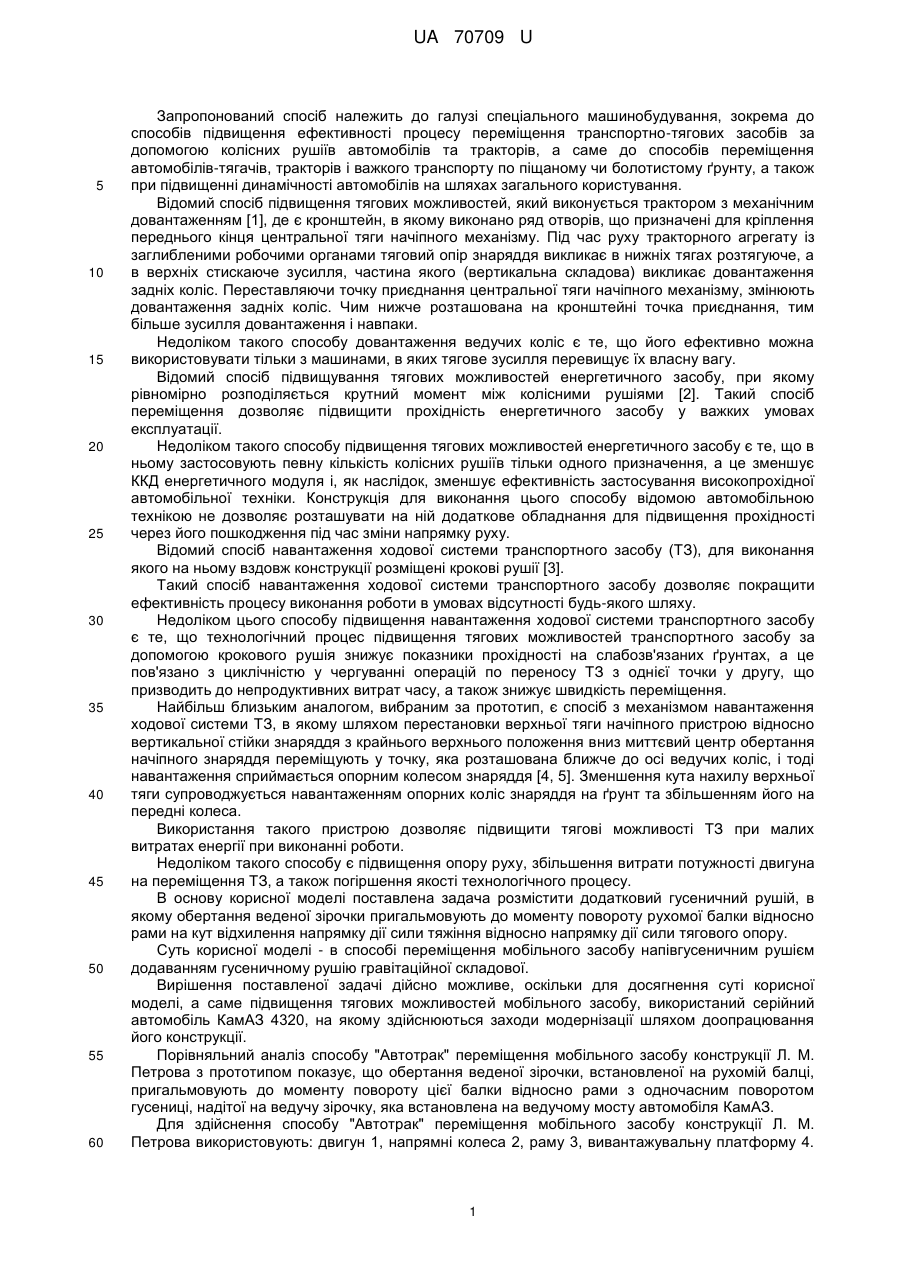
Реферат: Спосіб "Автотрак" переміщення мобільного засобу конструкції Л. М. Петрова, який включає передачу крутного моменту напівгусеничним рушієм та додаванням гусеничному рушію гравітаційної складової, причому обертання веденої зірочки пригальмовують до моменту повороту рухомої балки відносно рами на кут відхилення напрямку дії сили тяжіння відносно напрямку дії сили тягового опору. UA 70709 U (12) UA 70709 U UA 70709 U 5 10 15 20 25 30 35 40 45 50 55 60 Запропонований спосіб належить до галузі спеціального машинобудування, зокрема до способів підвищення ефективності процесу переміщення транспортно-тягових засобів за допомогою колісних рушіїв автомобілів та тракторів, а саме до способів переміщення автомобілів-тягачів, тракторів і важкого транспорту по піщаному чи болотистому ґрунту, а також при підвищенні динамічності автомобілів на шляхах загального користування. Відомий спосіб підвищення тягових можливостей, який виконується трактором з механічним довантаженням [1], де є кронштейн, в якому виконано ряд отворів, що призначені для кріплення переднього кінця центральної тяги начіпного механізму. Під час руху тракторного агрегату із заглибленими робочими органами тяговий опір знаряддя викликає в нижніх тягах розтягуюче, а в верхніх стискаюче зусилля, частина якого (вертикальна складова) викликає довантаження задніх коліс. Переставляючи точку приєднання центральної тяги начіпного механізму, змінюють довантаження задніх коліс. Чим нижче розташована на кронштейні точка приєднання, тим більше зусилля довантаження і навпаки. Недоліком такого способу довантаження ведучих коліс є те, що його ефективно можна використовувати тільки з машинами, в яких тягове зусилля перевищує їх власну вагу. Відомий спосіб підвищування тягових можливостей енергетичного засобу, при якому рівномірно розподіляється крутний момент між колісними рушіями [2]. Такий спосіб переміщення дозволяє підвищити прохідність енергетичного засобу у важких умовах експлуатації. Недоліком такого способу підвищення тягових можливостей енергетичного засобу є те, що в ньому застосовують певну кількість колісних рушіїв тільки одного призначення, а це зменшує ККД енергетичного модуля і, як наслідок, зменшує ефективність застосування високопрохідної автомобільної техніки. Конструкція для виконання цього способу відомою автомобільною технікою не дозволяє розташувати на ній додаткове обладнання для підвищення прохідності через його пошкодження під час зміни напрямку руху. Відомий спосіб навантаження ходової системи транспортного засобу (ТЗ), для виконання якого на ньому вздовж конструкції розміщені крокові рушії [3]. Такий спосіб навантаження ходової системи транспортного засобу дозволяє покращити ефективність процесу виконання роботи в умовах відсутності будь-якого шляху. Недоліком цього способу підвищення навантаження ходової системи транспортного засобу є те, що технологічний процес підвищення тягових можливостей транспортного засобу за допомогою крокового рушія знижує показники прохідності на слабозв'язаних ґрунтах, а це пов'язано з циклічністю у чергуванні операцій по переносу ТЗ з однієї точки у другу, що призводить до непродуктивних витрат часу, а також знижує швидкість переміщення. Найбільш близьким аналогом, вибраним за прототип, є спосіб з механізмом навантаження ходової системи ТЗ, в якому шляхом перестановки верхньої тяги начіпного пристрою відносно вертикальної стійки знаряддя з крайнього верхнього положення вниз миттєвий центр обертання начіпного знаряддя переміщують у точку, яка розташована ближче до осі ведучих коліс, і тоді навантаження сприймається опорним колесом знаряддя [4, 5]. Зменшення кута нахилу верхньої тяги супроводжується навантаженням опорних коліс знаряддя на ґрунт та збільшенням його на передні колеса. Використання такого пристрою дозволяє підвищити тягові можливості ТЗ при малих витратах енергії при виконанні роботи. Недоліком такого способу є підвищення опору руху, збільшення витрати потужності двигуна на переміщення ТЗ, а також погіршення якості технологічного процесу. В основу корисної моделі поставлена задача розмістити додатковий гусеничний рушій, в якому обертання веденої зірочки пригальмовують до моменту повороту рухомої балки відносно рами на кут відхилення напрямку дії сили тяжіння відносно напрямку дії сили тягового опору. Суть корисної моделі - в способі переміщення мобільного засобу напівгусеничним рушієм додаванням гусеничному рушію гравітаційної складової. Вирішення поставленої задачі дійсно можливе, оскільки для досягнення суті корисної моделі, а саме підвищення тягових можливостей мобільного засобу, використаний серійний автомобіль КамАЗ 4320, на якому здійснюються заходи модернізації шляхом доопрацювання його конструкції. Порівняльний аналіз способу "Автотрак" переміщення мобільного засобу конструкції Л. М. Петрова з прототипом показує, що обертання веденої зірочки, встановленої на рухомій балці, пригальмовують до моменту повороту цієї балки відносно рами з одночасним поворотом гусениці, надітої на ведучу зірочку, яка встановлена на ведучому мосту автомобіля КамАЗ. Для здійснення способу "Автотрак" переміщення мобільного засобу конструкції Л. М. Петрова використовують: двигун 1, напрямні колеса 2, раму 3, вивантажувальну платформу 4. 1 UA 70709 U 5 10 15 20 25 30 До рами 3 шарнірним кронштейном 5 і шарніром 6 приєднана рухома балка 7, на вільному кінці якої рухомо закріплено ведену зірочку 8. До рами 3 закріплено головну передачу 9, на валу 10 якої закріплено ведучу зірочку 11. До балки 7 шарнірно прикріплено амортизатор 12, інший кінець якого за допомогою шарніра прикріплено до рами 3. На ведену зірочку 8 та ведучу зірочку надіто гусеницю 15. До рухомої балки 7 приєднані опорні колеса 16. Верхня частина гусениці опирається на підтримуючий ролик 17. Спосіб "Автотрак" переміщення мобільного засобу конструкції Л. М. Петрова здійснюють таким чином. Від двигуна 1 за допомогою трансмісії крутний момент передається до головної передачі 9. Від головної передачі валом 10 крутний момент передають до ведучої зірочки 11. Гусениця 15 надає мобільному засобу переносного руху. При наїзді на нерівності амортизатор зменшує свою довжину, і рухома балка 7 разом з веденою зірочкою 8, опорними колесами 16 повертається відносно шарніра 6. Таким чином в амортизаторі 12 накопичується потенціальна енергія, яка при переїзді через нерівності надає додаткового руху мобільного засобу через раму 3. Вирішення поставленої задачі можливе, оскільки для досягнення суті корисної моделі, а саме узгодження обертання гусеничного ланцюга з моментом опору перекочування по ньому веденої зірочки, можуть бути використані ходові системи малогабаритних тракторів, автомобілів, на яких здійснюються заходи модернізації шляхом доопрацювання їх конструкції. Порівняльний аналіз способу "Автотрак" переміщення мобільного засобу з прототипом показує, що обертання веденої зірочки пригальмовують до моменту повороту рухомої балки відносно рами на кут відхилення напрямку дії сили тяжіння відносно напрямку дії сили тягового опору. Підвищення прохідності автомобіля завдяки передачі крутного моменту напівгусеничним рушієм та додавання гусеничному рушію гравітаційної складової здійснюють за рахунок того, що обертання веденої зірочки пригальмовують до моменту повороту рухомої балки відносно рами на кут відхилення сили тяжіння відносно напрямку дії тягового опору. Джерела інформації: 1. Трактор "Беларусь" МТЗ-80, МТЗ-80Д, МТЗ-82, МТЗ-82Л, МТЗ-82Н. Техническое описание и инструкция по эксплуатации / И. Ф Брусников, Г. В. Михайлов. Э. А Бомберов и др. - М.: Урожай, 1983. - С. 351. 2. Болтинский В. А. и др. Тракторы и автомобили. - М.: Колос, 1970. - С. 367-392. 3. Гуревич А. М. и Сорокин Е. М. Тракторы и автомобили - М.: Колос, 1971. - С. 496. 4. Большая Советская энциклопедия. - Том 13. - М, 1955. - С. 466. 5. Большая Советская энциклопедия. - Том 47. - М, 1955. - С. 494. 35 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 Спосіб переміщення мобільного засобу, який включає передачу крутного моменту напівгусеничним рушієм та додаванням гусеничному рушію гравітаційної складової, який відрізняється тим, що обертання веденої зірочки пригальмовують до моменту повороту рухомої балки відносно рами на кут відхилення напрямку дії сили тяжіння відносно напрямку дії сили тягового опору. 2 UA 70709 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійською"avtotrak" method for moving mobile vehicle of petrov design
Автори англійськоюPetrov Leonid Mykolaiovych, Milovanov Valerii Ivanovych, Drevov Denys Vasyliovych
Назва патенту російськоюСпособ "автотрак" перемещения мобильного средства конструкции л. м. петрова
Автори російськоюПетров Леонид Николаевич, Милованов Валерий Иванович, Древов Денис Васильевич
МПК / Мітки
МПК: B62D 61/00
Мітки: спосіб, л.м, засобу, мобільного, переміщення, конструкції, автотрак, петрова
Код посилання
<a href="https://ua.patents.su/5-70709-sposib-avtotrak-peremishhennya-mobilnogo-zasobu-konstrukci-lm-petrova.html" target="_blank" rel="follow" title="База патентів України">Спосіб “автотрак” переміщення мобільного засобу конструкції л.м. петрова</a>
Спосіб “лягушка” переміщення мобільного енергетичного засобу конструкції л. м. петрова

Номер патенту: 64312
Опубліковано: 10.11.2011
Автори: Мартинова Олена Борисівна, Петров Леонід Миколайович, Булаєвський Сергій Юрійович
МПК: B62D 61/00
Мітки: засобу, конструкції, переміщення, лягушка, мобільного, петрова, енергетичного, спосіб
Формула / Реферат:
Спосіб переміщення мобільного енергетичного засобу конструкції, який включає передачу крутного моменту колісним рушіям та довантаження колісних рушіїв гравітаційною складовою, який відрізняється тим, що крутний момент колісним рушіям одночасно подається від центрального редуктора, закріпленого на остові енергетичного засобу, і зміну міжосьової відстані колісних рушіїв здійснюють телескопічними балками та одночасно утримують їх пружинним...
Бі-інерційний спосіб переміщення енергетичного засобу л.м.петрова
Номер патенту: 13465
Опубліковано: 17.04.2006
Автори: Ногінський Костянтин Олександрович, Бєлохвост Олександр Вільович, Петров Леонід Миколайович, Овчинник Володимир Анатолійович, Константінов Михайло Іванович
МПК: B62D 61/00
Мітки: засобу, переміщення, бі-інерційний, енергетичного, л.м.петрова, спосіб
Формула / Реферат:
Спосіб переміщення енергетичного засобу, що включає переміщення шляхом підведення до колісного рушія крутного моменту і переміщення колісного рушія сумісно з елементами утворення конструкції енергетичного засобу, який відрізняється тим, що елементи конструкції енергетичного засобу ділять на окремі частини, одну з яких з'єднують з колісним рушієм, а другій відносно колісного рушія надають можливість переміщення у напрямку руху енергетичного...
Спосіб переміщення енергетичного засобу
Номер патенту: 4163
Опубліковано: 17.01.2005
Автори: Павлюченко Анатолій Васильович, Скориченко Олександр Іванович, Петров Леонід Миколайович
МПК: B62D 55/08
Мітки: засобу, переміщення, спосіб, енергетичного
Формула / Реферат:
Спосіб переміщення енергетичного засобу, за яким переміщення відбувається шляхом підведення до гусеничного ланцюга крутного моменту і обертання ведучої зірочки сумісно з гусеничним ланцюгом, який відрізняється тим, що додатково гусеничному ланцюгу відносно ведучої зірочки надають можливість переміщення у напрямку руху енергетичного засобу.
Спосіб переміщення енергетичного засобу “vertep”
Номер патенту: 7046
Опубліковано: 15.06.2005
Автори: Яковенко Анатолій Миколайович, Сєнік Володимир Борисович, Петров Леонід Миколайович
МПК: B62D 61/00
Мітки: переміщення, vertep, засобу, спосіб, енергетичного
Формула / Реферат:
Спосіб переміщення енергетичного засобу шляхом підведення до колісного рушія крутного моменту, який відрізняється тим, що крутний момент зрівнюють по фазах обертання ведучого колеса та вільного колеса і в момент нерівностей частот обертання цих коліс збільшують навантаження на вільне колесо.
Спосіб магнітокерованого переміщення мобільного робота
Номер патенту: 47369
Опубліковано: 25.01.2010
Автори: Запорожець Юрій Михайлович, Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович
МПК: B25J 9/10
Мітки: робота, мобільного, спосіб, магнітокерованого, переміщення
Формула / Реферат:
Спосіб магнітокерованого переміщення мобільного робота, згідно з яким мобільний робот оснащують ведучими колесами та притискними магнітами, розміщують його у робочій зоні, за допомогою притискних магнітів утримують його корпус на оброблюваній феромагнітній поверхні, приводять до руху ведучі колеса і здійснюють покрокове переміщення мобільного робота по оброблюваній феромагнітній поверхні, для чого почергово крок за кроком вводять у зчеплення...
Попередній патент: N’-[(1н-імідазол-5-іл)метилен]ізонікотиногідразиди, які виявляють протитуберкульозну активність
Наступний патент: Спосіб профілактики рецидивів алергодерматозів у хворих з вторинними імунодефіцитними станами
Випадковий патент: Пристрій для виготовлення штапельного волокна із розплавів термопластичних матеріалів