Спосіб установлення зв’язку низькоорбітального космічного апарата з морським пунктом керування
Номер патенту: 72415
Опубліковано: 27.08.2012
Автори: Загорулько Олександр Миколайович, Богом'я Володимир Іванович, Соколовський Денис Олександрович, Давидов Володимир Семенович
Формула / Реферат
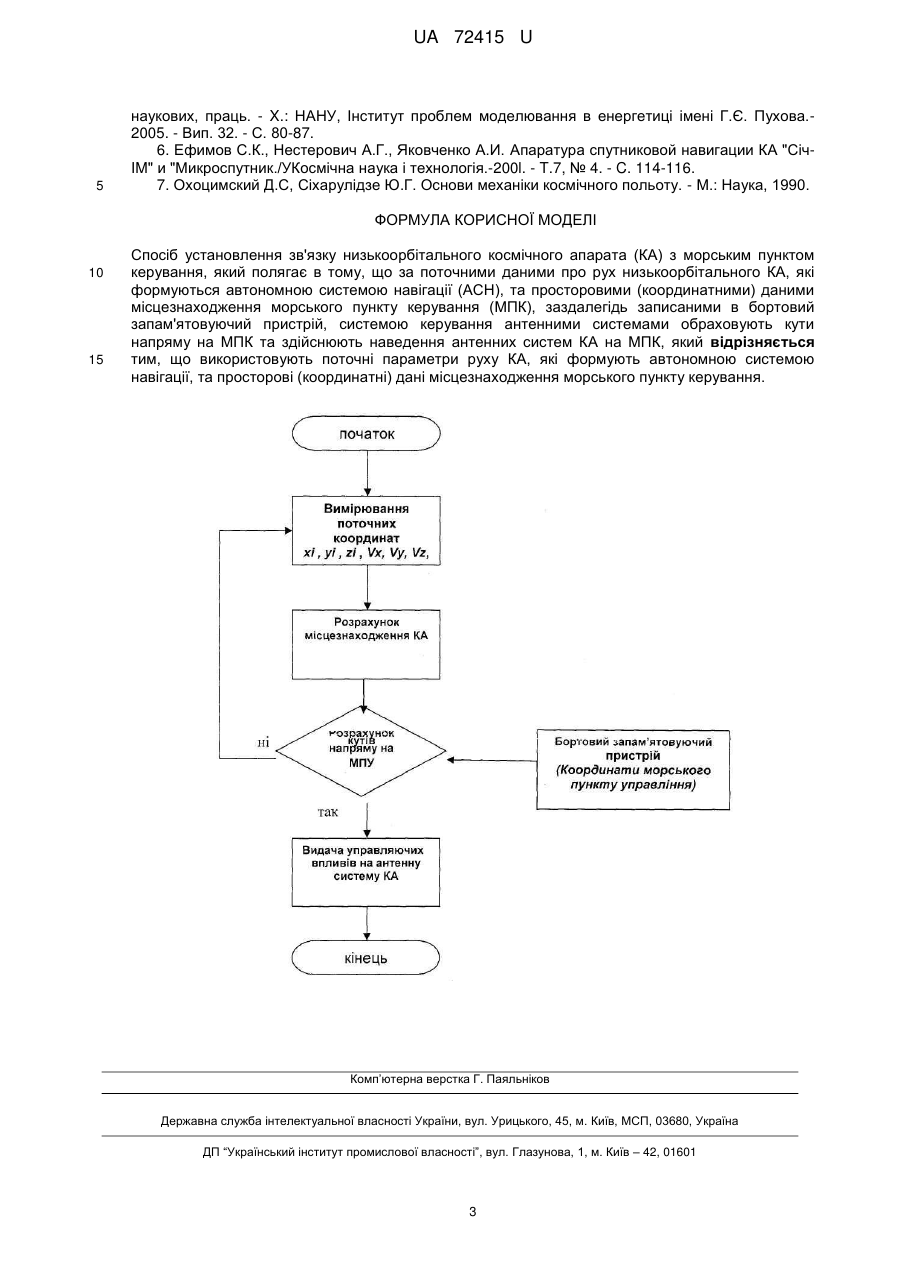
Спосіб установлення зв'язку низькоорбітального космічного апарата (КА) з морським пунктом керування, який полягає в тому, що за поточними даними про рух низькоорбітального КА, які формуються автономною системою навігації (АСН), та просторовими (координатними) даними місцезнаходження морського пункту керування (МПК), заздалегідь записаними в бортовий запам'ятовуючий пристрій, системою керування антенними системами обраховують кути напряму на МПК та здійснюють наведення антенних систем КА на МПК, який відрізняється тим, що використовують поточні параметри руху КА, які формують автономною системою навігації, та просторові (координатні) дані місцезнаходження морського пункту керування.
Текст
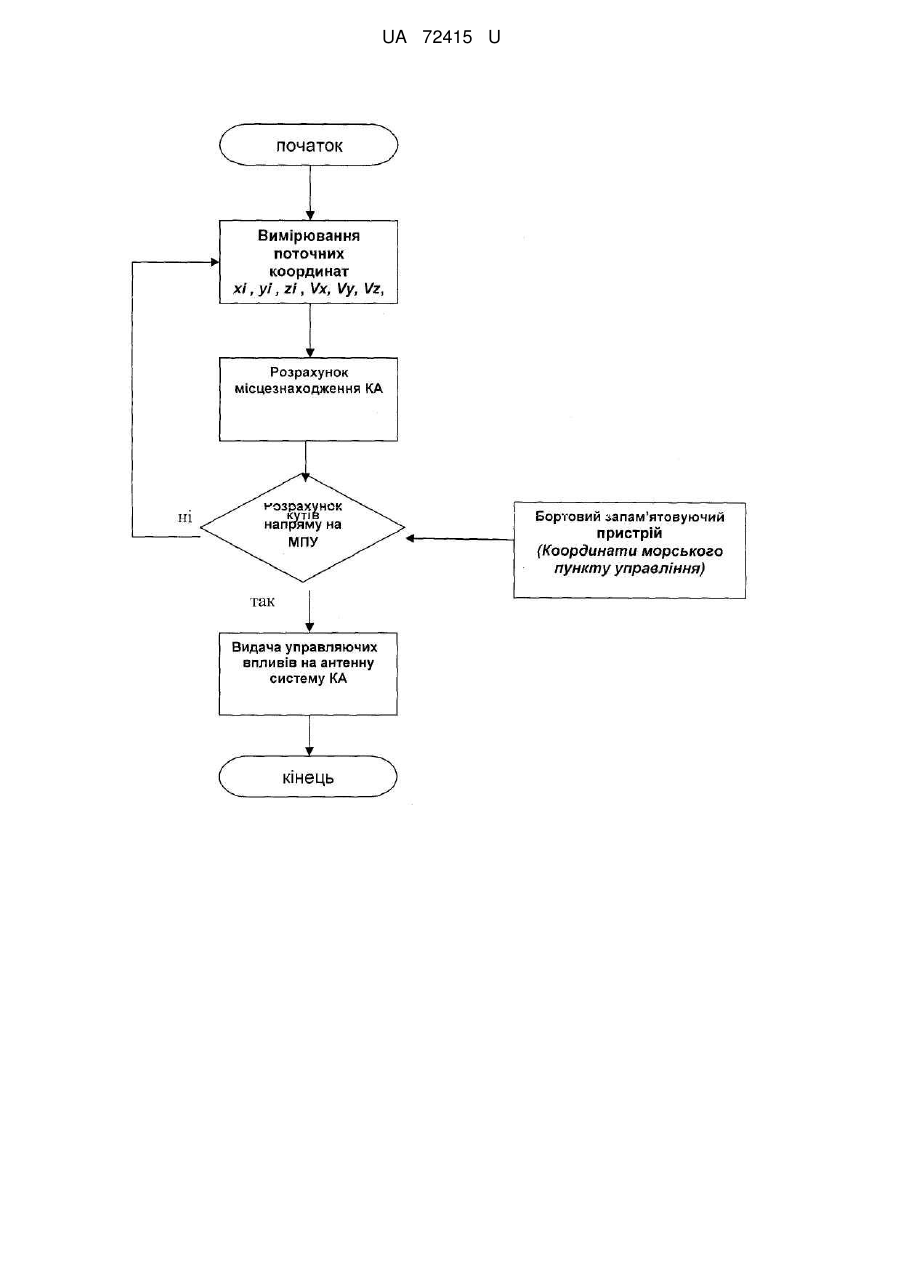
Реферат: Спосіб установлення зв'язку низькоорбітального космічного апарата (КА) з морським пунктом керування полягає в тому, що за поточними даними про рух низькоорбітального КА, які формуються автономною системою навігації (АСН), та просторовими (координатними) даними місцезнаходження морського пункту керування (МПК), заздалегідь записаними в бортовий запам'ятовуючий пристрій, системою керування антенними системами обраховують кути напряму на МПК та здійснюють наведення антенних систем КА на МПК. При цьому використовують поточні параметри руху КА, які формують автономною системою навігації, та просторові (координатні) дані місцезнаходження морського пункту керування. UA 72415 U (12) UA 72415 U UA 72415 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі систем керування, зокрема до радіотехнічних методів керування бортовою апаратурою космічних апаратів (КА), і може бути використана в системах керування антенними системами вітчизняних космічних апаратів, які знаходяться на низьких орбітах. Відомий спосіб установлення зв'язку низькоорбітальних космічних апаратів з супутникомретранслятором чи наземним пунктом керування - програмний, коли параметри руху КА апріорно відомі. Це дозволяє завчасно обрахувати траєкторію руху КА, спрогнозувати закон зміни кутових координат за часом та записати їх в бортовий запам'ятовуючий пристрій, керуючі сигнали якого відпрацьовуються антенними системами для їх наведення на об'єкт в потрібний час на основі апріорних даних про рух КА [1, 2, 4]. Недоліком відомого способу є низька точність прогнозування та визначення місцезнаходження КА, особливо в умовах однопунктної технології, що приводить до додаткового використання енергетичного, інформаційного та технічного ресурсу, а також до необхідності періодично записувати в бортовий запам'ятовуючий пристрій керуючі сигнали для наведення антенних систем, що збільшує обсяг інформації в напрямку "Земля-борт"[3, 5]. Відомий також спосіб, при якому на низькоорбітальних космічних апаратах встановлюють нерухомі антенні системи без систем їх керування [1, 2]. Недоліками даного способу є досить широка діаграма спрямованості бортових антенних пристроїв, що значно погіршує енергетичний потенціал радіолінії та потребує значного підвищення потужності передаючих пристроїв. Найбільш близьким до пропонованого технічним рішенням, вибраним як прототип, є програмний спосіб установлення зв'язку з наземним пунктом керування В основу корисної моделі поставлено задачу створити спосіб установлення зв'язку з морським пунктом керування, який шляхом завчасного введення в пристрій наведення антенних систем низькоорбітальних КА просторових (координатних) складових морського пункту керування та поточних параметрів руху КА, сформованих автономною системою навігації, дати можливість забезпечити установлення надійного зв'язку КА в напрямку "Земля-борт" та "бортЗемля". Для рішення поставленої задачі у способі установлення зв'язку низькоорбітального КА з морським пунктом керування, який полягає в тому, що за поточними даними про рух низькоорбітального КА, які формуються автономною системою навігації (АСН), та просторовими (координатними) даними місцезнаходження морського пункту керування (МПК), заздалегідь записаними в бортовий запам'ятовуючий пристрій, система керування антенними системами обраховує кути напряму на МПК та здійснює наведення антенних систем КА на МПК, відповідно до корисно моделі використовують поточні параметри руху КА, які формують автономною системою навігації та просторові (координатні) дані місцезнаходження морського пункту керування. Суть запропонованої корисної моделі полягає у наступному: зараз в закордонній та вітчизняній практиці побудови бортового обладнання КА широке застосування находять автономні системи навігації (АСН), які використовують сигнали глобальних космічних навігаційних систем "Глонасс" та GPS. При цьому перевагу мають ті, які використовують сигнали обох систем: при зникненні сигналів будь-якої навігаційної системи або неможливості її використання вони автоматично продовжують роботу по іншій космічній навігаційній системі [6]. Вихідною інформацією АСН є: - поточні координати КА (в Гринвіцькій системі координат) х і, yi, zі, - складові вектора швидкості Vxі, Vуі, Vzі - поточні значення часу (UTC). В той-же час для встановлення зв'язку та керування низькоорбітальними космічними апаратами, поряд з наземними стаціонарними, широке використання знаходять пересувні пункти керування, розміщені на авіаційному, морському та сухопутному транспорті [1, 2, 5]. За поточними даними АСН та просторовими (координатними) даними морського пункту керування, заздалегідь переданими на борт КА, бортовим обчислювальним пристроєм проводиться розрахунок кутів напряму на морський пункт керування, особливістю якого є те, що його координати в Гринвіцькій системі координат є практично незмінними з плином часу. Ефективність вибраної системи координат повинна бути направлена на досягнення максимальної швидкодії при рішенні задачі бортовою ЕОМ з необхідною точністю. Враховуючи те, що автономною системою навігації поточні координати КА формуються в Гринвіцькій системі координат, всі розрахунки необхідно провести для орбітальної системи координат. 1 UA 72415 U Нехай координати морського пункту керування (або іншого відносно нерухомого приймального пристрою) х0, у0, z0. Тоді відстань між ним та низькоорбітальним космічним апаратом (КА) буде: Ri 5 10 x0 xi 2 y0 yi 2 z0 zi 2 . Проводиться розрахунок координат морського пункту керування в орбітальній системі координат (ОСК), яка вводиться наступним чином: початок системи відліку співпадає з центром мас КА, вісь ОХ направлена по радіусу-вектору супутника (проведеному із центра Землі), вісь OY паралельна трансверсальній складовій швидкості, вісь OZ доповнює систему до правої. Для визначення складових в ОСК необхідно послідовно виконати повороти на кути Ω (пряме сходження висхідного вузла орбіти), І (нахилення орбіти), U (аргумент широти супутника). Для подальших розрахунків складові швидкості в ОСК не використовуються. Координатні складові T вектора 0 =(X0,Y0,Z0,Vx0, Vy0, Vz0) в ОСК визначаються наступним чином [7]: 0 a Y0 Ya Z0 Za a Ya , Z a де: М - матриця переходу, яка розраховується за формулою: 15 20 cos u sin cos i sin u cos sin u sin i cos u cos cos i sin u sin sin u cos cos i cos u sin sin u sin cos i cos u cos sin i cos u sin i sin sin i cos cos i Далі проводиться розрахунок параметрів наведення антени на морський пункт керування (чи іншу пересувну прийомну станцію). Азимут відраховується в площині YOZ орбітальної системи координат від позитивного напрямку осі OY та змінюється від 0 до 360 градусів: Z 0 arctg Y при 0 0, 0 0 0 Z 0 arctg Y 180 при 0 0 0 Z 0 arctg Y 360 при 0 0, 0 0 0 . Кут місця відраховується від площини ΥΟΖ (позитивним вважається відлік кута в бік позитивного напрямку осі ОХ): 0 arctg 2 2 0 0 25 30 35 40 . При наведенні антени ΚΑ на морський пункт керування кут γ завжди буде позитивним. Реалізація запропонованої корисної моделі дозволяє забезпечити установлення надійного зв'язку космічним апаратом з морським пунктом керування в заданому взаємною зоною радіоогляду просторі з більшою, ніж у відомому способі керування точністю при спрощенні процедури технічної реалізації та приблизно в двічі скоротити обсяг інформації, що передається на борт КА. Алгоритм роботи бортової системи керування антенними системами КА для запропонованого способу представлений на кресленні. Перелік посилань 1. Космические радиотехнические комплексы / Под общ. редакцией Г.В. Стогова - Μ.: МО СССР, 1986-626 с. 2. Застосування космічних систем для забезпечення дій збройних сил. Навчальний посібник / за ред. B.I. Ткаченка - X.: ХВУ, 2001-192 с. 3. Глазов Б.И. Автоматизация управления средствами и частями полигонных и космических комплексов - М.: МО СССР, 1988-326 с. 4. Організація системи керування космічними засобами в умовах однопунктної технології / СТ. Черепков, B.I. Богомья, О.М.Загорулько, С.Д.Ставицький: Навчальний посібник. - К.: НАОУ, 2005.-57 с. 5. Загорулько А.Н. Особенности программных способов управления космическими аппаратами при однопунктной технологии. // Моделювання та інформаційні технології: Збірник, 2 UA 72415 U 5 наукових, праць. - X.: НАНУ, Інститут проблем моделювання в енергетиці імені Г.Є. Пухова.2005. - Вип. 32. - С. 80-87. 6. Ефимов С.К., Нестерович А.Г., Яковченко А.И. Апаратура спутниковой навигации КА "СічIM" и "Микроспутник./УКосмічна наука і технологія.-200l. - T.7, № 4. - C. 114-116. 7. Охоцимский Д.С, Сіхарулідзе Ю.Г. Основи механіки космічного польоту. - М.: Наука, 1990. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Спосіб установлення зв'язку низькоорбітального космічного апарата (КА) з морським пунктом керування, який полягає в тому, що за поточними даними про рух низькоорбітального КА, які формуються автономною системою навігації (АСН), та просторовими (координатними) даними місцезнаходження морського пункту керування (МПК), заздалегідь записаними в бортовий запам'ятовуючий пристрій, системою керування антенними системами обраховують кути напряму на МПК та здійснюють наведення антенних систем КА на МПК, який відрізняється тим, що використовують поточні параметри руху КА, які формують автономною системою навігації, та просторові (координатні) дані місцезнаходження морського пункту керування. Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for communicating installation of low-orbit spacecraft with sea control point
Автори англійськоюSokolovskyi Denys Oleksandrovych, Davydov Volodymyr Semenovych, Bohomia Volodymyr Ivanovych, Zahorulko Oleksandr Mykolaiovych
Назва патенту російськоюСпособ установления связи низкоорбитального космического аппарата с морским пунктом управления
Автори російськоюСоколовский Денис Александрович, Давыдов Владимир Семенович, Богомья Владимир Иванович, Загорулько Александр Николаевич
МПК / Мітки
МПК: B64G 1/24
Мітки: космічного, пунктом, установлення, апарата, низькоорбітального, морським, спосіб, зв'язку, керування
Код посилання
<a href="https://ua.patents.su/5-72415-sposib-ustanovlennya-zvyazku-nizkoorbitalnogo-kosmichnogo-aparata-z-morskim-punktom-keruvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб установлення зв’язку низькоорбітального космічного апарата з морським пунктом керування</a>
Спосіб установлення зв`язку космічним апаратом з наземною станцією керування
Номер патенту: 25020
Опубліковано: 25.07.2007
Автори: Загорулько Олександр Миколайович, Моргун Олександр Андрійович, Богом'я Володимир Іванович, Козелкова Катерина Сергіївна
МПК: B64G 1/24
Мітки: керування, наземною, спосіб, зв'язку, апаратом, космічним, установлення, станцією
Формула / Реферат:
Спосіб установлення зв'язку космічним апаратом (КА) з наземною станцією керування, який полягає в тому, що моменти вмикання (вимикання) сеансної апаратури відбуваються при досягненні трасою польоту (підсупутниковою точкою орбіти КА) координат початку (кінця) зони радіоогляду наземної станції керування, заздалегідь записаних в бортовий запам'ятовуючий пристрій, який відрізняється тим, що використовуються поточні дані про рух КА в гринвіцькій...
Пристрій керування кутом установлення лопаток двокаскадного нерухомого лопаткового апарата турбореактивного двигуна
Номер патенту: 84672
Опубліковано: 25.11.2008
Автори: Рен Флоран, Ролен Домінік, Шатель Ален Жан Шарль
Мітки: лопаткового, установлення, нерухомого, кутом, двигуна, керування, пристрій, апарата, двокаскадного, турбореактивного, лопаток
Формула / Реферат:
Пристрій керування кутом установлення лопаток (2) двокаскадного нерухомого лопаткового апарата, який розташований на кожусі (1) і містить приводний механізм і, для кожного каскаду, двоплечий важіль (7, 8), що обертається на осі (20, 21) кожуха, і тягу (6) керування каскадом, зв'язану з одним плечем двоплечого важеля, причому синхронізуюча тяга (9) зв'язана з іншим плечем щонайменше одного з двоплечих важелів для приведення його в рух, який...
Пристрій для відмовостійкого керування рухом космічного апарата навколо центру мас
Номер патенту: 11645
Опубліковано: 16.01.2006
Автори: Булгаков Віталій Михайлович, Гавриленко Олег Іванович, Мирна Олена Володимирівна
МПК: B64G 1/24
Мітки: апарата, рухом, центру, мас, відмовостійкого, космічного, пристрій, керування
Формула / Реферат:
Пристрій для відмовостійкого керування рухом космічного апарата навколо центру мас, що включає релейний гіроскопічний датчик кутової швидкості, блок керування виконавчим органом та виконавчий орган, генератор коливань та пристрій порівняння, релейний гіроскопічний датчик кутової швидкості має датчик моменту, що встановлено на осі рамки релейного гіроскопічного датчика кутової швидкості, причому вихід генератора коливань з'єднаний з датчиком...
Гіроскопічна система керування кутовим станом космічного літального апарата
Номер патенту: 24489
Опубліковано: 10.07.2007
Автори: Дибська Ирина Юріївна, Гордін Олександр Григорович, Великородня Юлія Сергіївна
МПК: B64G 1/28
Мітки: кутовим, керування, система, гіроскопічна, станом, літального, апарата, космічного
Формула / Реферат:
1. Гіроскопічна система керування кутовим станом космічного літального апарата, яка містить по кожній осі ортогональної системи координат, зв'язаної з корпусом, триступеневий силовий гіроскоп змінної структури, що дозволяє трансформувати його в двоступеневий силовий гіроскоп, аретуючий пристрій на зовнішній рамі гіроскопа, датчик моменту та демпфіруючий пристрій на осі підвісу внутрішньої рами, яка відрізняється тим, що по кожній осі...
Спосіб установлення зв’язку низькоорбітальним космічним апаратом з супутником-ретранслятором
Номер патенту: 31413
Опубліковано: 10.04.2008
Автори: Богом'я Володимир Іванович, Загорулько Олександр Миколайович, Засуха Сергій Олексійович, Ожінський Віктор Васильович
МПК: B64G 1/24
Мітки: апаратом, зв'язку, установлення, низькоорбітальним, супутником-ретранслятором, спосіб, космічним
Формула / Реферат:
Спосіб установлення зв'язку низькоорбітальним космічним апаратом (КА) з супутником-ретранслятором, який полягає в тому, що за поточними даними про рух низькоорбітального КА, які формуються автономною системою навігації, та просторовими (координатними) даними супутника-ретранслятора (СР), заздалегідь записаними в бортовий запам'ятовуючий пристрій, система керування антенними системами обраховує кути напряму на СР та здійснює наведення антенних...
Попередній патент: Комбінований протинабряковий лікарський засіб на основі есцину та/або його солей та осмотично-активних речовин
Наступний патент: Пристрій для каталітичної нейтралізації шкідливих газових викидів
Випадковий патент: Спосіб прогнозування гетерозису в птахівництві