Пристрій для відмовостійкого керування рухом космічного апарата навколо центру мас
Номер патенту: 11645
Опубліковано: 16.01.2006
Автори: Булгаков Віталій Михайлович, Гавриленко Олег Іванович, Мирна Олена Володимирівна
Формула / Реферат
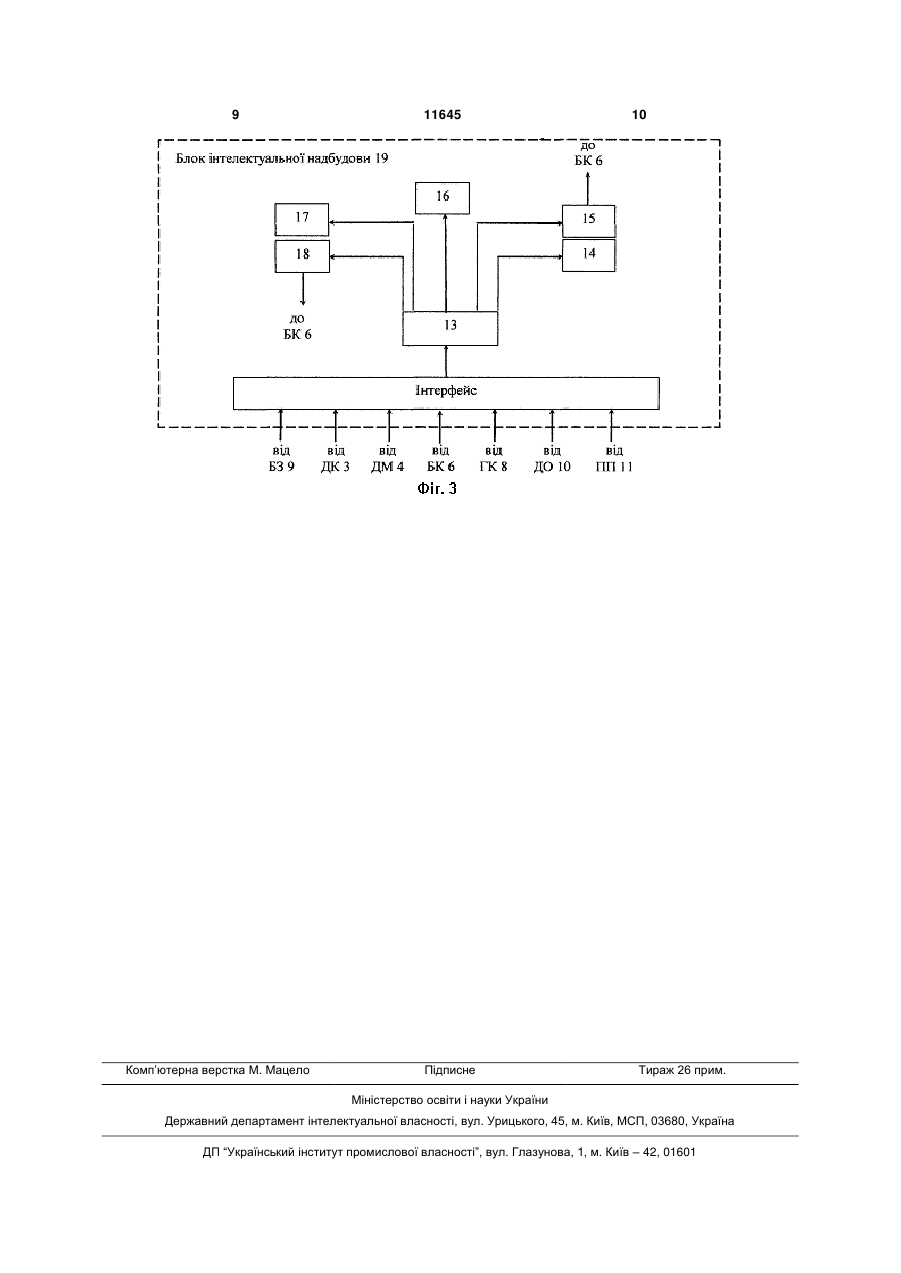
Пристрій для відмовостійкого керування рухом космічного апарата навколо центру мас, що включає релейний гіроскопічний датчик кутової швидкості, блок керування виконавчим органом та виконавчий орган, генератор коливань та пристрій порівняння, релейний гіроскопічний датчик кутової швидкості має датчик моменту, що встановлено на осі рамки релейного гіроскопічного датчика кутової швидкості, причому вихід генератора коливань з'єднаний з датчиком моменту, перший та другий входи пристрою порівняння з'єднані з датчиком кута релейного гіроскопічного датчика кутової швидкості та генератором коливань відповідно, а вихід пристрою порівняння з'єднаний з блоком керування виконавчим органом, який відрізняється тим, що виходи датчика кута релейного гіроскопічного датчика кутової швидкості, пристрою порівняння, блока керування виконавчим органом, датчика моменту, генератора коливань з'єднані з входами блоку інтелектуальної надбудови, що включає аналізатор ситуації та підсистеми діагностування, прийняття рішень, відновлення працездатності, керування в аварійній ситуації, прогнозу.
Текст
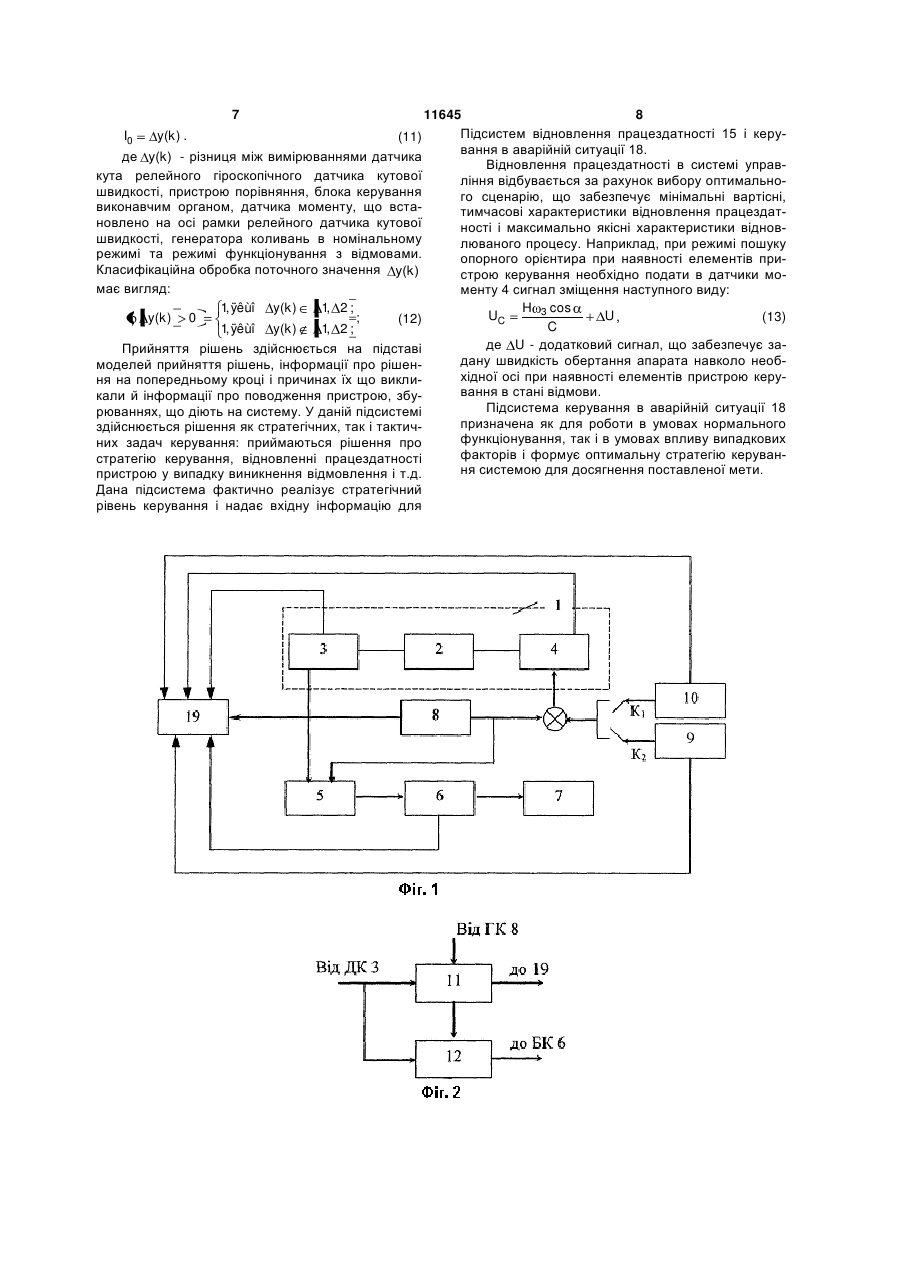
Пристрій для відмовостійкого керування рухом космічного апарата навколо центру мас, що включає релейний гіроскопічний датчик кутової швидкості, блок керування виконавчим органом та виконавчий орган, генератор коливань та пристрій порівняння, релейний гіроскопічний датчик кутової швидкості має датчик моменту, що встановлено на 3 11645 4 чика моменту, генератора коливань з'єднані з вхоустановленими на ній елементами конструкції; дами блоку інтелектуальної надбудови, що вклюh - коефіцієнт в'язкого тертя; чає в себе аналізатор ситуації та підсистеми діагТ - модуль величини моменту сухого тертя; ностування, прийняття рішень, відновлення - кут повороту рухливої рамки навколо вихіпрацездатності, керування в аварійній ситуації, дної осі; прогнозу. Х - проекція абсолютної кутової швидкості на Сутність корисної моделі пояснюється кресвісь чутливості; ленням, де на Фіг.1 зображена блок - схема приН - модуль кінематичного моменту гіроскопа; строю для відмовостійкого керування рухом космі( ) - моменти збурення, що залежать від кута чного апарату навколо центру мас, на Фіг.2 - блок повороту ; схема пристрою порівняння тривалості імпульсу С - крутизна датчиків моменту 4; релейного датчика кутової швидкості з тривалістю UГ - вихідний сигнал генератора коливань 8, напівперіоду генератора коливань, а на Фіг.3 – наприклад, синусоїдальний чи періодичний із пряблок інтелектуальної надбудови 19. мокутними імпульсами негативної і позитивної Пристрій для відмовостійкого керування рухом полярності та ін. космічного апарату навколо центру мас містить З рівняння (1) випливає, що при виконанні релейний гіроскопічний датчик кутової швидкості 1, умови що складається з гіроскопа 2, датчика кута 3 і дат( ) CUã T чики моменту 4; релейний гіроскопічний датчик (2) x H cos H cos кутової швидкості 1 підключений послідовно через пристрій порівняння тривалості або частоти сигнарухлива рамка гіроскопу датчик кута 2 буде лів релейного гіроскопічного датчика кутової швипритиснута до упора гіроскопічним моментом дкості з тривалістю напівперіоду або частотою | 2|=|H x cos | і датчик кута 3 буде видавати генератора коливань 5 і блок керування виконавпостійний сигнал, полярність якого дорівнює чим органом 6 до виконавчого органа 7. До датчиsign x, пристрій порівняння 5 буде у свою чергу ків моменту 4 через суматор підключений генеравидавати релейний сигнал, по якому включиться тор коливань 8 і через перемикачі 1 або 2 виконавчий орган 7 і почнеться гальмування (гавідповідно блок формування сигналу зміщення 9 сіння швидкості ) космічного апарата. Наступить чи датчик орієнтації 10 на опорний орієнтир. Блок момент часу коли будуть виконуватися наступні схема пристрою порівняння 5 (Фіг.2) містить приумови: стрій порівняння 11 і ключ 12. На перший і другий ( ) CUã T входи пристрою порівняння 11 подаються сигнали , x H cos H cos відповідно з виходів датчика кута 3 і генератора (3) коливань 8. Опис поточної ситуації, що склалася у ( ) CUã T пристрої керування, за допомогою інтерфейсу на, x H cos H cos дходить у на вхід Аналізатора 13 (Фіг.3). Його завдання полягає в оцінці поточної інформації відпопри цьому, якщо наступить у зв'язку зі зменвідно до цільової функції функціонування шенням X умова: пристрою і визначення необхідності втручання в CUã ( ) T процес, що протікає. Якщо поточна ситуація не , (4) x H cos H cos вимагає такого втручання, то Аналізатор 13 передає її на подальшу обробку тільки в Підсистему то рухлива рамка почне відриватися від упора прогнозу 16. У противному випадку опис поточної під дією сигналів генератора коливань 8, а сигнал ситуації надходить у Підсистему діагностування датчика кута 3 стане перемінним. Зміна вихідного 14. сигналу датчика кута 3 протягом одного періоду Прогнозування здійснюється на підставі модевихідного сигналу генератора коливань 8 означає, лей процесів, що протікають у пристрої, інформації CUã про прогноз на попередньому кроці і поточній інщо x , тобто що кутова швидкість стаH cos формації про поводження пристрою і збурювання. Дана підсистема є невід'ємною частиною стратегіла менше порога, що задається вираженням чного рівня керування, тому що тільки на підставі CUã . Пристрій порівняння 5 при зміні протяданих прогнозу можна вибрати оптимальну страH cos тегію виконання необхідного завдання і формування послідовності дій, необхідних для їхньої гом одного періоду сигналу генератора коливань 8 реалізації, забезпечити оптимальну оперативну вихідного сигналу датчика кута 3 не видає сигналу корекцію поводження в залежності від внутрішніх і в блок керування виконавчим органом 6, виконавзовнішніх впливів, що збурюють. чий орган 7 виключається доти, поки під дією моРобота пристрою полягає в наступному: при ментів, що збурюють, діючих на космічний апарат, розімкнутих перемикачах 1 і 2 відключені блоки кутова швидкість x не зросте і знову не настуформування сигналу зміщення 9 і датчик орієнтації пить умова (2). Граничне значення швидкості 10. Для даного випадку рівняння руху рухливої рамки гіроскопу 2 має вид: CUã можна змінити за рахунок зміни амx .. . H cos (1) I h sign H x cos CUã T плітуди вихідних сигналів генератора коливань. Де Таким чином, пристрій з релейним датчиком кутоІ - момент інерції рухливої рамки разом із 5 11645 6 вої швидкості дозволяє організувати режим гасіння Цей режим забезпечується попереднім режикутової швидкості космічного апарата, коли при мом при включеному ключі 1, через який сигнал зменшенні кутової швидкості нижче встановленого зміщення від блока формування сигналу зміщення значення виконавчий орган виключається й енер9 через суматор подається в датчики моменту 4. госпоживання припиняється, при цьому також приПри використанні лінійного датчика орієнтації 10 з пиняється двостороннє включення виконавчого характеристикою (8), відхилення осі, що орієнтуоргана, а отже, зменшується кількість його спрається, космічного апарата від напрямку на орієнцьовувань. тир буде дорівнювати Одним з режимів роботи системи керування UC , (10) OT рухом космічного апарата навколо його центра K мас є режим пошуку опорного орієнтира, він відріде Uc - сигнал з виходу блока формування сизняється від режиму гасіння кутової швидкості тим, гналу зміщення 9. Пристрій порівняння 11 визнащо швидкість обертання апарата навколо необхідчає Тр>Т2 чи ні, де Тр - тривалість сигналу датчика ної осі повинна бути не нульовою, а заданою. Для кута З, T2 - тривалість напівперіоду генератора забезпечення такого режиму на вхід датчиків моколивань 8. Якщо Tp>T2, то на виході пристрою менту 4 подається сигнал зміщення. Для цього порівняння 11 з'являється сигнал, що надходить замикається ключ та приєднується вихід блока на перший вхід ключа 12, а на другий вхід ключа формування сигналу зміщення 9 до виходу датчи12 подається сигнал з датчика кута З (тобто з реків моменту 4, наприклад, через суматор разом з лейного гіроскопічного датчика кутової швидкості). виходом генератора коливань 8. Для забезпеченПри наявності сигналу на першому вході К 12 ня заданої величини х швидкості обертання косостанній відкритий і пропускає сигнал датчика кута мічного апарата необхідно подати в датчики мо3 у блок керування виконавчим органом 6 з відпоменту 4 сигнал зміщення відною полярністю по який включається виконавH 3 cos чий орган 7. Пристрій порівняння 11 вимірює або в UC . (5) C нього закладають інформацію про тривалість T2 напівперіоду сигналу генератора коливань 8. З У цьому випадку граничне відхилення викопоявою імпульсу на виході датчика кута 3 пристрій навчого органа буде відбуватися при наступних порівняння 11 починає порівнювати його тривашвидкостях: лість Тр із напівперіодом Т2 генератора коливань CUã CUã 8. Якщо тривалість імпульсу датчика кута 3 почи(6) n1 3, n2 3 H cos H cos нає перевищувати значення Т , то на виході при2 тобто зміщено щодо нуля на 3. Третім важливим режимом керування рухом космічного апарата навколо центра мас є його орієнтування на опорний орієнтир. Для виконання релейного керування орієнтацією космічного апарата в просторі розмикається ключ 2 і замикається ключ 1, через який вихідний сигнал датчика опорного орієнтира буде надходити на вхід датчиків моменту 4. У цьому випадку виконавчий орган 7 буде відключатися при виконанні наступних умов: C Uã C Uäî (7) H cos H cos де Uдо - вихідний сигнал датчика орієнтації. Якщо використовується лінійний датчик орієнтації, тобто Uäî K , (8) де К - крутизна датчика орієнтації 10, а - кут відхилення, то з (7) одержуємо лінії переключення наступного виду: C Uã CK ' , H cos H cos (9) C Uã CK '' . H cos H cos відповідні релейному керуванню по сумі сигналів кутового відхилення до кутової швидкості. При орієнтації на опорний орієнтир одним з режимів роботи є сканування, тобто відхилення осі, що орієнтується, від напрямку на орієнтир на задані кути, наприклад, при пошуку іншого орієнтира або при дослідженні поверхні першого орієнтира. строю порівняння 11 з'являється сигнал, що відкриває ключ 12, через який сигнал з виходу датчика кута 3 надходить з відповідною полярністю на вихід пристрою порівняння 5, а від нього на вхід блок керування виконавчим органом 6. Якщо сигнал датчика кута 3 змінює полярність, тобто зменшується до нуля, то пристрій порівняння 11 встановлюється у початкове положення: ключ 12 запирається. З появою сигналу на виході датчика кута 3 знову повторюються вищеописані операції. Коли тривалість сигналу датчика кута 3 перевищить T2, знову відкривається ключ 12 і сигнал з датчика кута 3 надходить у блок керування виконавчим органом 6 доти, поки сигнал датчика кута 3 не зменшиться до нуля і ключ 12 закриється. Якщо сигнали датчика кута 3 по тривалості Тр будуть менше або рівні Т2, то ключ 12 буде замкнений, сигнал у блок керування виконавчим органом 6 не буде надходити і виконавчий орган 7 буде виключений. При наявності відмов в датчику кута, датчику моменту; пристрої порівняння тривалості або частоти сигналів релейного гіроскопічного датчика кутової швидкості, блоці керування виконавчим органом, генераторі коливань, блоці формування сигналу зміщення чи датчику орієнтації на опорний орієнтир діагностування зводиться до рішення наступних задач: виявлення відмовлення, пошук місця виникнення відмовлення, установлення класу відмовлення, визначення виду відмовлення. У результаті діагностування виходить інформація для рішення задач прийняття рішень і відновлення працездатності системи. Для вирішення задачі діагностування застосовуються показники якості у формі наступного функціонала: 7 11645 8 Підсистем відновлення працездатності 15 і керуI0 y(k ) . (11) вання в аварійній ситуації 18. де y(k ) - різниця між вимірюваннями датчика Відновлення працездатності в системі управкута релейного гіроскопічного датчика кутової ління відбувається за рахунок вибору оптимальношвидкості, пристрою порівняння, блока керування го сценарію, що забезпечує мінімальні вартісні, виконавчим органом, датчика моменту, що встатимчасові характеристики відновлення працездатновлено на осі рамки релейного датчика кутової ності і максимально якісні характеристики відновшвидкості, генератора коливань в номінальному люваного процесу. Наприклад, при режимі пошуку режимі та режимі функціонування з відмовами. опорного орієнтира при наявності елементів приКласифікаційна обробка поточного значення y(k ) строю керування необхідно подати в датчики момає вигляд: менту 4 сигнал зміщення наступного виду: H 3 cos 1, ÿêùî y(k ) 1, 2 ; UC U, (13) y(k ) 0 ; (12) C 1, ÿêùî y(k ) 1, 2 ; де U - додатковий сигнал, що забезпечує заПрийняття рішень здійснюється на підставі дану швидкість обертання апарата навколо необмоделей прийняття рішень, інформації про рішенхідної осі при наявності елементів пристрою керуня на попередньому кроці і причинах їх що викливання в стані відмови. кали й інформації про поводження пристрою, збуПідсистема керування в аварійній ситуації 18 рюваннях, що діють на систему. У даній підсистемі призначена як для роботи в умовах нормального здійснюється рішення як стратегічних, так і тактичфункціонування, так і в умовах впливу випадкових них задач керування: приймаються рішення про факторів і формує оптимальну стратегію керуванстратегію керування, відновленні працездатності ня системою для досягнення поставленої мети. пристрою у випадку виникнення відмовлення і т.д. Дана підсистема фактично реалізує стратегічний рівень керування і надає вхідну інформацію для 9 Комп’ютерна верстка М. Мацело 11645 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for failure-resistant control of motion of automatic spacecraft around the center of mass
Автори англійськоюHavrylenko Oleh Ivanovych, Myrna Olena Volodymyrivna
Назва патенту російськоюУстройство для отказоустойчивого управления движением космического аппарата вокруг центра масс
Автори російськоюГавриленко Олег Иванович, Мирная Елена Владимировна
МПК / Мітки
МПК: B64G 1/24
Мітки: центру, космічного, відмовостійкого, керування, рухом, мас, пристрій, апарата
Код посилання
<a href="https://ua.patents.su/5-11645-pristrijj-dlya-vidmovostijjkogo-keruvannya-rukhom-kosmichnogo-aparata-navkolo-centru-mas.html" target="_blank" rel="follow" title="База патентів України">Пристрій для відмовостійкого керування рухом космічного апарата навколо центру мас</a>
Пристрій для керування рухом космічного апарату навколо центру мас
Номер патенту: 3991
Опубліковано: 27.12.1994
Автор: Анупрієнко Генадій Єфремович
МПК: B64G 1/24
Мітки: апарату, рухом, пристрій, мас, керування, центру, космічного
Формула / Реферат:
1. Устройство для управления движением космического аппарата вокруг центра масс, содержащее релейный гироскопический датчик угловой скорости, блок управления исполнительным органом и исполнительный орган, отличающееся тем, что в него введены генератор колебаний и устройство сравнения длительности или частоты сигналов релейного гироскопического датчика угловой скорости с длительностью полупериода или частотой генератора колебаний, релейный...
Спосіб активного відмовостійкого управління орієнтацією космічного апарата
Номер патенту: 11671
Опубліковано: 16.01.2006
Автори: Лученко Олег Олексійович, Мирна Олена Володимирівна, Пархоменко Юлія Анатоліївна, Гавриленко Олег Іванович
МПК: B64G 1/28
Мітки: апарата, активного, спосіб, орієнтацією, відмовостійкого, управління, космічного
Формула / Реферат:
Спосіб активного відмовостійкого управління орієнтацією космічного апарата, що включає вимірювання кутового відхилення орієнтованої осі космічного апарата від потрібного напряму, визначення моментів часу, у які вимірюване кутове відхилення приймає екстремальні значення, змінювання моменту інерції космічного апарата в моменти часу, що відповідають відповідним екстремальним значенням кутового відхилення та значенням кутового відхилення, що...
Пристрій визначення відносної кутової швидкості при коливальному процесі керування орієнтацією космічного апарата
Номер патенту: 25409
Опубліковано: 30.10.1998
Автори: Карпачов Юрій Андрійович, Анупрієнко Генадій Ефремович
МПК: B64G 1/24
Мітки: орієнтацією, пристрій, керування, процесі, коливальному, визначення, швидкості, кутової, відносної, апарата, космічного
Формула / Реферат:
Устройство определения относительной угловой скорости при колебательном процессе управления ориентацией космического аппарата, содержащее датчик, измеритель абсолютной угловой скорости в виде датчика угловой скорости, отличающееся тем, что введены датчик: ориентации, устройство определения момента времени прохождения экстремума выходного сигнала датчика ориентации, запоминающее устройство сигнала измерителя абсолютной угловой скорости и...
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11858
Опубліковано: 16.01.2006
Автори: Войченко Оксана Олександрівна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: спосіб, швидкостей, вісесиметричного, демпфірування, апарата, літального, кутових, космічного
Формула / Реферат:
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування подовжньої кутової швидкості визначають момент початку...
Система гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 12002
Опубліковано: 16.01.2006
Автори: Шапранов Ілля Володимирович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: літального, початкових, кутових, система, вісесиметричного, космічного, апарата, гасіння, швидкостей
Формула / Реферат:
Система гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої і другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого і другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків...
Попередній патент: Процес моделювання ушкодження печінкових вен і нижньої порожнистої вени
Наступний патент: Спосіб управління клітинним поділом гепатоцитів щурів шляхом створення десимпатизації та різних експозицій після неї
Випадковий патент: Взуття спеціального призначення