Спосіб формування сигналів аеродинамічного управління на ділянці вільного падіння при вирішенні задачі доставки вантажу методом десантування
Номер патенту: 72843
Опубліковано: 27.08.2012
Автори: Коврижкін Олег Георгійович, Гамаюн Володимир Петрович, Коврижкін Ігор Олегович
Формула / Реферат
Спосіб формування сигналів аеродинамічного управління на ділянці вільного падіння при вирішенні задачі доставки вантажу методом десантування, що включає задання координат точки доставки вантажу, скидання вантажу з літального апарата методом десантування, визначення поточних координат вантажу за допомогою системи супутникової навігації, який відрізняється тим, що задання координат точки доставки вантажу, зокрема географічної широти jтд, географічної довготи lТД та висоти Нтд знаходження вантажу над земним геоїдом, здійснюють за допомогою блока введення координат точки доставки вантажу з подальшою, після скидання вантажу з літального апарата, передачею їх в бортову цифрову обчислювальну машину, в яку також подають із системи супутникової навігації поточні координати вантажу, що спускається, зокрема поточні координати географічної широти j, географічної довготи l та висоти Н знаходження вантажу над земним геоїдом, та із датчика кутової швидкості сигнал про зміну кутової швидкості обертання вантажу wх, при цьому за допомогою бортової цифрової обчислювальної машини на підставі значень заданих координат точки доставки вантажу jтд, lТД, Нтд, сигнал у швидкості вітру U і поточних координат вантажу j, l, Н з урахуванням сигналу про зміну кутової швидкості вантажу wх формують сигнал управління рулями вантажу, що спускається, який подають в блок управління аеродинамічними рулями, і при досягненні значення поточної висоти Н знаходження вантажу над земним геоїдом, рівного заданому Нтд, подають сигнал на відкривання парашута.
Текст
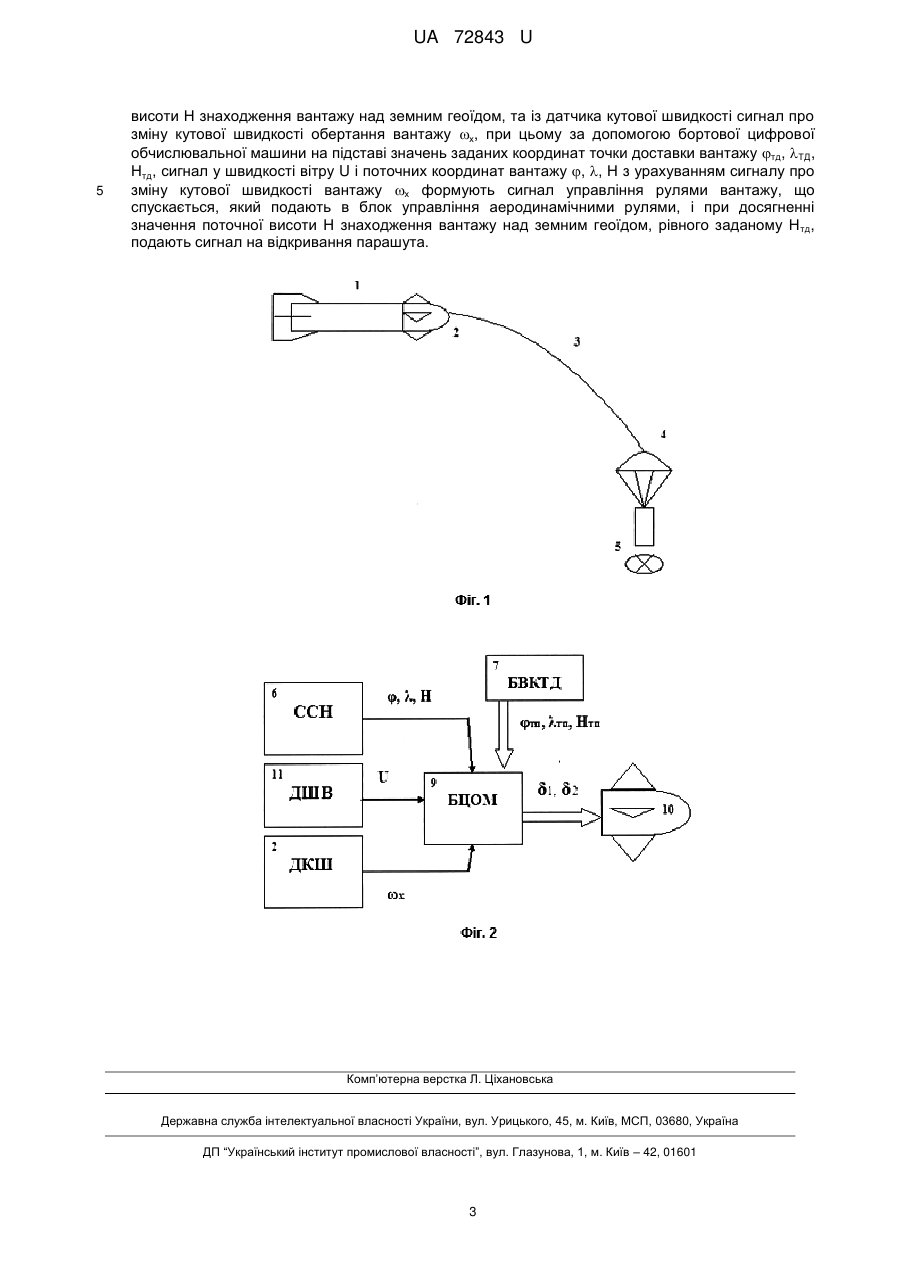
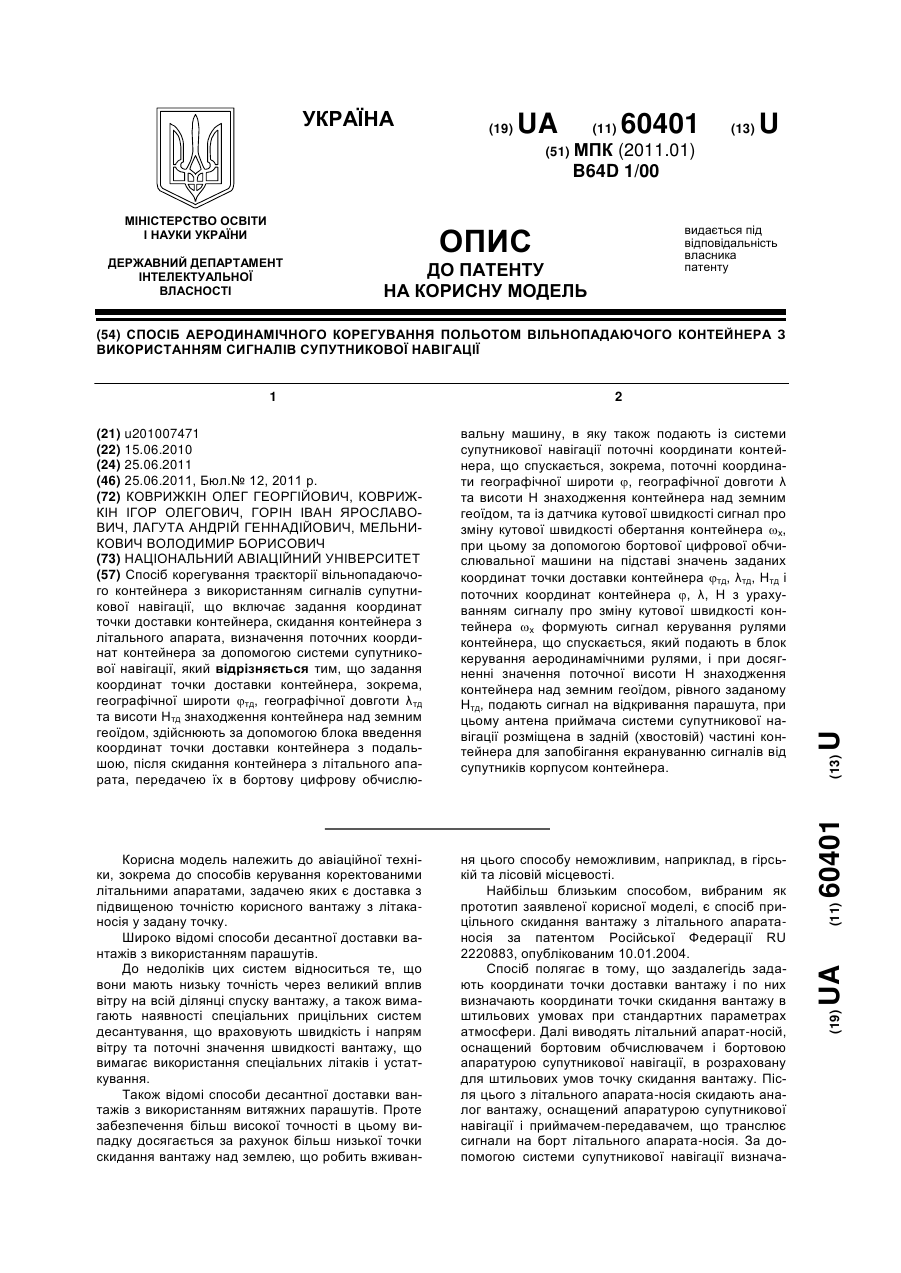
Реферат: Спосіб формування сигналів аеродинамічного управління на ділянці вільного падіння при вирішенні задачі доставки вантажу методом десантування включає задання координат точки доставки вантажу, скидання вантажу з літального апарата методом десантування, визначення поточних координат вантажу за допомогою системи супутникової навігації. Задання координат точки доставки вантажу, зокрема географічної широти тд, географічної довготи ТД та висоти Нтд знаходження вантажу над земним геоїдом, здійснюють за допомогою блока введення координат точки доставки вантажу з подальшою, після скидання вантажу з літального апарата, передачею їх в бортову цифрову обчислювальну машину, в яку також подають із системи супутникової навігації поточні координати вантажу, що спускається, зокрема поточні координати географічної широти , географічної довготи та висоти Н знаходження вантажу над земним геоїдом, та із датчика кутової швидкості сигнал про зміну кутової швидкості обертання вантажу х. UA 72843 U (12) UA 72843 U UA 72843 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до авіаційної техніки, зокрема до способів керування коректованими літальними апаратами, задачею яких є доставка з підвищеною точністю корисного вантажу з літака-носія у задану точку. Широко відомі способи десантної доставки вантажів з використанням парашутів. До недоліків цих систем належить те, що вони мають низьку точність через великий вплив вітру на всій ділянці спуску вантажу, а також вимагають наявності спеціальних прицільних систем десантування, що враховують швидкість і напрям вітру та поточні значення швидкості вантажу, що вимагає використання спеціальних літаків і устаткування. Також відомі способи десантної доставки вантажів з використанням витяжних парашутів. Проте забезпечення більш високої точності в цьому випадку досягається за рахунок більш низької точки скидання вантажу над землею, що робить вживання цього способу неможливим, наприклад, в гірській та лісовій місцевості. Найбільш близьким аналогом заявленої корисної моделі є спосіб прицільного скидання вантажу з літального апарата-носія за патентом Російської Федерації RU 2220883, опублікованим 10.01.2004. Спосіб полягає в тому, що заздалегідь задають координати точки доставки вантажу і по них визначають координати точки скидання вантажу в штильових умовах при стандартних параметрах атмосфери. Далі виводять літальний апарат-носій, оснащений бортовим обчислювачем і бортовою апаратурою супутникової навігації, в розраховану для штильових умов точку скидання вантажу. Після цього з літального апарата-носія скидають аналог вантажу, оснащений апаратурою супутникової навігації і приймачем-передавачем, що транслює сигнали на борт літального апарата-носія. За допомогою системи супутникової навігації визначають поточні координати аналога вантажу і координати точки приземлення аналога вантажу. Уточнюють координати точки скидання вантажу і скидають вантаж в точці з уточненими координатами. Ознаками найближчого аналога, що збігаються з суттєвими ознаками запропонованої корисної моделі, є завдання координат точки доставки контейнера, скидання контейнера з літального апарата-носія, визначення поточних координат контейнера за допомогою системи супутникової навігації. Недоліком даного способу є те, що для його реалізації, крім пристроїв, що дозволяють здійснювати скидання вантажу в атмосферу, потрібне спеціальне бортове устаткування літальних апаратів-носіїв, крім того, використання аналога вантажу, як елемента коректування точки скидання вантажу, приводить до суттєвого збільшення сукупної вартості застосовуваного устаткування і потребує участі висококваліфікованого обслуговуючого персоналу та повторного заходу апарата-носія у точку скидання вантажу. При цьому даний спосіб не враховує можливі зміни швидкості і напряму вітру, що мають негативний вплив на точність доставки вантажу. В основу корисної моделі поставлено задачу створення способу формування сигналів аеродинамічного управління на ділянці вільного падіння, що забезпечує доставку його в задану точку з похибкою, яка не перевищує декількох десятків метрів, і вимагає наявності спеціального бортового устаткування літального апарата-носія, з якого проводиться скидання вантажу, що приведе до суттєвого зниження сукупної вартості доставки і до виключення вимоги щодо наявності висококваліфікованого обслуговуючого персоналу. Поставлена задача вирішена за рахунок того, що спосіб формування сигналів аеродинамічного управління на ділянці вільного падіння при вирішенні задачі доставки вантажу методом десантування, що включає завдання координат точки доставки вантажу, скидання вантажу з літального апарата методом десантування, визначення поточних координат вантажу за допомогою системи супутникової навігації, відповідно до корисної моделі, завдання координат точки доставки вантажу, зокрема, географічної широти ТД, географічної довготи ТД та висоти НТД знаходження вантажу над земним геоїдом, здійснюють за допомогою блока введення координат точки доставки вантажу, з подальшою, після скидання вантажу з літального апарата, передачею їх в бортову цифрову обчислювальну машину, в яку також подають із системи супутникової навігації поточні координати вантажу, що спускається, зокрема, поточні координати географічної широти , географічної довготи і висоти Н знаходження вантажу над земним геоїдом, та із датчика кутової швидкості сигнал про зміну кутової швидкості обертання вантажу X, при цьому за допомогою бортової цифрової обчислювальної машини на підставі значень заданих координат точки доставки вантажу ТД, ТД, НТД, сигналу швидкості вітру U і поточних координат вантажу , , Н з урахуванням сигналу про зміну кутової швидкості вантажу X формують сигнал управління рулями вантажу, що спускається, який подають в блок управління аеродинамічними рулями, і при досягненні значення поточної висоти Н знаходження вантажу над земним геоїдом, рівного заданому НТД, подають сигнал на відкривання парашута. 1 UA 72843 U 5 10 15 20 25 30 35 40 45 Наведені нижче креслення пояснюють суть корисної моделі, що заявляється. Фігури креслення, як і опис прикладів конкретного виконання способу, наведені лише для ілюстрації заявленої корисної моделі і не обмежують обсяг прав, визначений формулою корисної моделі. Фіг. 1 - схема застосування способу формування сигналів аеродинамічного управління на ділянці вільного падіння при вирішенні задачі доставки вантажу у задану точку методом десантування; Фіг. 2 - структурна схема пристрою аеродинамічного управління на ділянці вільного падіння при вирішенні задачі доставки вантажу методом десантування в атмосфері. Після скидання вантажу 1 з літального апарата-носія в точці 2 відбувається подальше падіння вантажу, під час якого здійснюють корегування його траєкторії 3 за допомогою формування та подання сигналів до пристрою аеродинамічного управління на ділянці вільного падіння вантажу в атмосфері. При досягненні вантажем мінімально допустимої для відкривання парашута висоти в заданій точці 4, здійснюють його відкривання і подальший плавний спуск вантажу в необхідну точку приземлення 5. У свою чергу пристрій аеродинамічного управління на ділянці вільного падіння вантажу в атмосфері складається із системи супутникової навігації (ССН) 6, блока введення координат точки доставки (БВКТД) 7, датчика кутової швидкості (ДКШ) 8, пов'язаних з бортовою цифровою обчислювальною машиною (БЦОМ) 9, блоку управління аеродинамічними рулями (БУАР) 10 та датчика швидкості вітру (ДШВ) 11. Таким чином, в бортову цифрову обчислювальну машину 9 з системи супутникової навігації 6 подають поточні координати вантажу, зокрема, поточні координати географічної широти , географічної довготи і висоти Н знаходження вантажу над земним геоїдом, з блоку введення координат точки доставки 7 подають задані координати точки доставки вантажу, зокрема, географічної широти ТД, географічної довготи ТД і висоти НТД знаходження вантажу над земним геоїдом, з датчика 11 подають сигнал швидкості вітру U, а з датчика кутової швидкості подають сигнал про зміну кутової швидкості обертання вантажу X. На підставі значень координат точки доставки вантажу ТД, ТД, НТД і значень поточних координат вантажу , , Н, з урахуванням сигналу про зміну кутової швидкості вантажу X та величини сигналу швидкості вітру U, в бортовій цифровій обчислювальній машині 9 розраховують необхідні координати положення пристрою, отримані за умови досягнення координат ТД та ТД при досягненні в процесі природного (балістичного) падіння висоти Н ТД=Н і формують сигнали управління рулями вантажу 1 та 2 (де 1 - сигнал управління рулями вантажу в каналі дальності (управління переміщенням у вертикальній площині падіння), а 2 сигнал управління рулями вантажу в каналі напряму (управління по курсу)), що подають в блок управління аеродинамічними рулями 10. Спосіб дозволяє забезпечувати обмежено (в межах допустимих аеродинамічних перевантажень) керований спуск (падіння) вантажу у задану точку на поверхні землі (води). Для плавного спуску вантажу відкривання парашутної системи здійснюється в безпосередній близькості від поверхні на мінімально допустимій для цього висоті. Спосіб ефективний при необхідності здійснення оперативної доставки вантажів на обмежену площу методом скидання з літальних апаратів-носіїв, при неможливості або недоцільності використання інших способів доставки. При цьому точність попадання в задану точку практично не залежить від висоти скидання і обумовлена точністю визначення координат з використанням системи супутникової навігації, що суттєво відрізняє його по цьому показнику від звичайного десантування. Для реалізації вказаного способу не потрібне спеціальне бортове устаткування літальних апаратів-носіїв, окрім пристроїв, що дозволяють здійснювати скидання вантажу в атмосферу. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 60 Спосіб формування сигналів аеродинамічного управління на ділянці вільного падіння при вирішенні задачі доставки вантажу методом десантування, що включає задання координат точки доставки вантажу, скидання вантажу з літального апарата методом десантування, визначення поточних координат вантажу за допомогою системи супутникової навігації, який відрізняється тим, що задання координат точки доставки вантажу, зокрема географічної широти тд, географічної довготи ТД та висоти Нтд знаходження вантажу над земним геоїдом, здійснюють за допомогою блока введення координат точки доставки вантажу з подальшою, після скидання вантажу з літального апарата, передачею їх в бортову цифрову обчислювальну машину, в яку також подають із системи супутникової навігації поточні координати вантажу, що спускається, зокрема поточні координати географічної широти , географічної довготи та 2 UA 72843 U 5 висоти Н знаходження вантажу над земним геоїдом, та із датчика кутової швидкості сигнал про зміну кутової швидкості обертання вантажу х, при цьому за допомогою бортової цифрової обчислювальної машини на підставі значень заданих координат точки доставки вантажу тд, ТД, Нтд, сигнал у швидкості вітру U і поточних координат вантажу , , Н з урахуванням сигналу про зміну кутової швидкості вантажу х формують сигнал управління рулями вантажу, що спускається, який подають в блок управління аеродинамічними рулями, і при досягненні значення поточної висоти Н знаходження вантажу над земним геоїдом, рівного заданому Н тд, подають сигнал на відкривання парашута. Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of forming signal of aerodynamic control signals on area of free fall when solving problem of cargo delivery by airdrop method
Автори англійськоюKovryzhkin Oleh Heorhiiovych, Kovryzhkin Ihor Olehovych, Hamaiun Volodymyr Petrovych
Назва патенту російськоюСпособ формирования сигналов аэродинамического управления на участке свободного падения при решении задачи доставки груза методом десантирования
Автори російськоюКоврижкин Олег Георгиевич, Коврижкин Игорь Олегович, Гамаюн Владимир Петрович
МПК / Мітки
Мітки: вільного, десантування, методом, управління, вантажу, спосіб, падіння, задачі, вирішенні, ділянці, формування, сигналів, доставки, аеродинамічного
Код посилання
<a href="https://ua.patents.su/5-72843-sposib-formuvannya-signaliv-aerodinamichnogo-upravlinnya-na-dilyanci-vilnogo-padinnya-pri-virishenni-zadachi-dostavki-vantazhu-metodom-desantuvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб формування сигналів аеродинамічного управління на ділянці вільного падіння при вирішенні задачі доставки вантажу методом десантування</a>
Спосіб аеродинамічного корегування польотом вільнопадаючого контейнера з використанням сигналів супутникової навігації
Номер патенту: 60401
Опубліковано: 25.06.2011
Автори: Горін Іван Ярославович, Коврижкін Олег Георгійович, Лагута Андрій Геннадійович, Мельникович Володимир Борисович, Коврижкін Ігор Олегович
МПК: B64D 1/00
Мітки: аеродинамічного, контейнера, спосіб, польотом, навігації, супутникової, сигналів, корегування, вільнопадаючого, використанням
Формула / Реферат:
Спосіб корегування траєкторії вільнопадаючого контейнера з використанням сигналів супутникової навігації, що включає задання координат точки доставки контейнера, скидання контейнера з літального апарата, визначення поточних координат контейнера за допомогою системи супутникової навігації, який відрізняється тим, що задання координат точки доставки контейнера, зокрема, географічної широти jтд, географічної довготи λтд та висоти Нтд...
Спосіб корегування траєкторії вільнопадаючого контейнера для доставки його у задану точку
Номер патенту: 43399
Опубліковано: 10.08.2009
Автори: Коврижкін Олег Георгійович, Шмєльов Михайло Євгенович, Коваленко Ігор Анатолійович
Мітки: задану, корегування, траєкторії, доставки, точку, спосіб, вільнопадаючого, контейнера
Формула / Реферат:
Спосіб корегування траєкторії вільнопадаючого контейнера для доставки його у задану точку, що включає задання координат точки доставки контейнера, скидання контейнера з літального апарата, визначення поточних координат контейнера за допомогою системи супутникової навігації, який відрізняється тим, що задання координат точки доставки контейнера, зокрема географічної широти φТД, географічної довготи λТД та висоти НТД знаходження...
Спосіб доставки вільнопадаючого контейнера у задану точку
Номер патенту: 9414
Опубліковано: 15.09.2005
Автор: Коврижкін Олег Георгійович
Мітки: задану, доставки, точку, вільнопадаючого, спосіб, контейнера
Формула / Реферат:
Спосіб доставки вільнопадаючого контейнера у задану точку, що включає задання координат точки доставки контейнера, скидання контейнера з літального апарата, визначення поточних координат контейнера за допомогою системи супутникової навігації, який відрізняється тим, що задання координат точки доставки контейнера, а саме: географічної широти , географічної довготи
Система для здійснення стрибків та вільного падіння з висотних об’єктів
Номер патенту: 69561
Опубліковано: 25.04.2012
Автори: Безух Олексій Андрійович, Хархан Іван Леонідович, Шкаліков Олександр Володимирович, Здоренко Олександр Валерійович, Жеребцов Юрій Олександрович, Мусатов Володимир Володимирович, Хижняк Сергій Володимирович
МПК: A62B 1/00, A63B 5/00, A62B 1/16, A63B 29/00, A62B 1/04, A62B 99/00
Мітки: висотних, вільного, об'єктів, стрибків, здійснення, система, падіння
Формула / Реферат:
1. Система для здійснення стрибків та вільного падіння з висотних об'єктів, що включає мотузки та/або троси, кріпильне, страхувальне, амортизаційне приладдя, пристрої для забезпечення рухливості мотузок та/або тросів, яка відрізняється тим, що містить мотузкову або тросову страхувальну систему, яка включає щонайменше одну мотузку або трос, один кінець якого призначений для закріплення із використанням кріпильного приладдя на людині, що...
Композиція носія для застосування при виготовленні пульпи, призначеної для обробки методом вільного абразиву, спосіб одержання композиції, спосіб її застосування, пульпа, призначена для обробки методом вільного
Номер патенту: 97482
Опубліковано: 27.02.2012
Автори: Шерлок Джейсон А., Бакші Абхая К.
МПК: C09K 3/14, B23D 57/00, C09K 5/08
Мітки: застосування, методом, пульпи, композиції, обробки, одержання, композиція, виготовленні, абразиву, спосіб, вільного, пульпа, призначена, призначеної, носія
Формула / Реферат:
1. Композиція носія для застосування при виготовленні пульпи, що призначена для обробки методом вільного абразиву, яка містить:від приблизно 15 об. % до приблизно 80 об. % поліетиленгліколю; від приблизно 20 об. % до 85 об. % води;один або більше модифікаторів в'язкості і/або один або більше активаторів,де пульпа для обробки методом вільного абразиву, виготовлена шляхом диспергування від приблизно 20 об. % до...
Попередній патент: Сошник
Наступний патент: Спосіб зняття відтиску з зубів під вкладку
Випадковий патент: Пристрій для контролю заштибовки