Анемометрична система
Номер патенту: 72946
Опубліковано: 10.09.2012
Автори: Тимченко Віктор Леонідович, Тимченко Інна Вікторівна, Кукліна Катерина Олексіївна
Формула / Реферат
Анемометрична система, що містить дисплей, вхід якого приєднаний до виходу мікроконтролера, блок контролю кількості імпульсів, блок контролю напряму вітру, пульт керування, виходи яких приєднані до входів мікроконтролера, мікроконтролер, до складу якого входять блок фільтрування випадкових коливань та усереднення кількості імпульсів, які надійшли з блока контролю кількості імпульсів, блок перерахунку кількості імпульсів у швидкість потоку вітру, вхід якого приєднаний до другого виходу вузла фільтрування випадкових коливань та усереднення кількості імпульсів, аналогово-цифровий перетворювач, входом з'єднаний з виходом блока контролю напрямку вітру, яка відрізняється тим, що вона додатково містить блок перерахунку кількості імпульсів у прискорення вітру, який приєднаний до першого виходу блока фільтрування випадкових коливань та усереднення кількості імпульсів, якінадійшли з блока контролю кількості імпульсів, які входять до складу мікроконтролера.
Текст
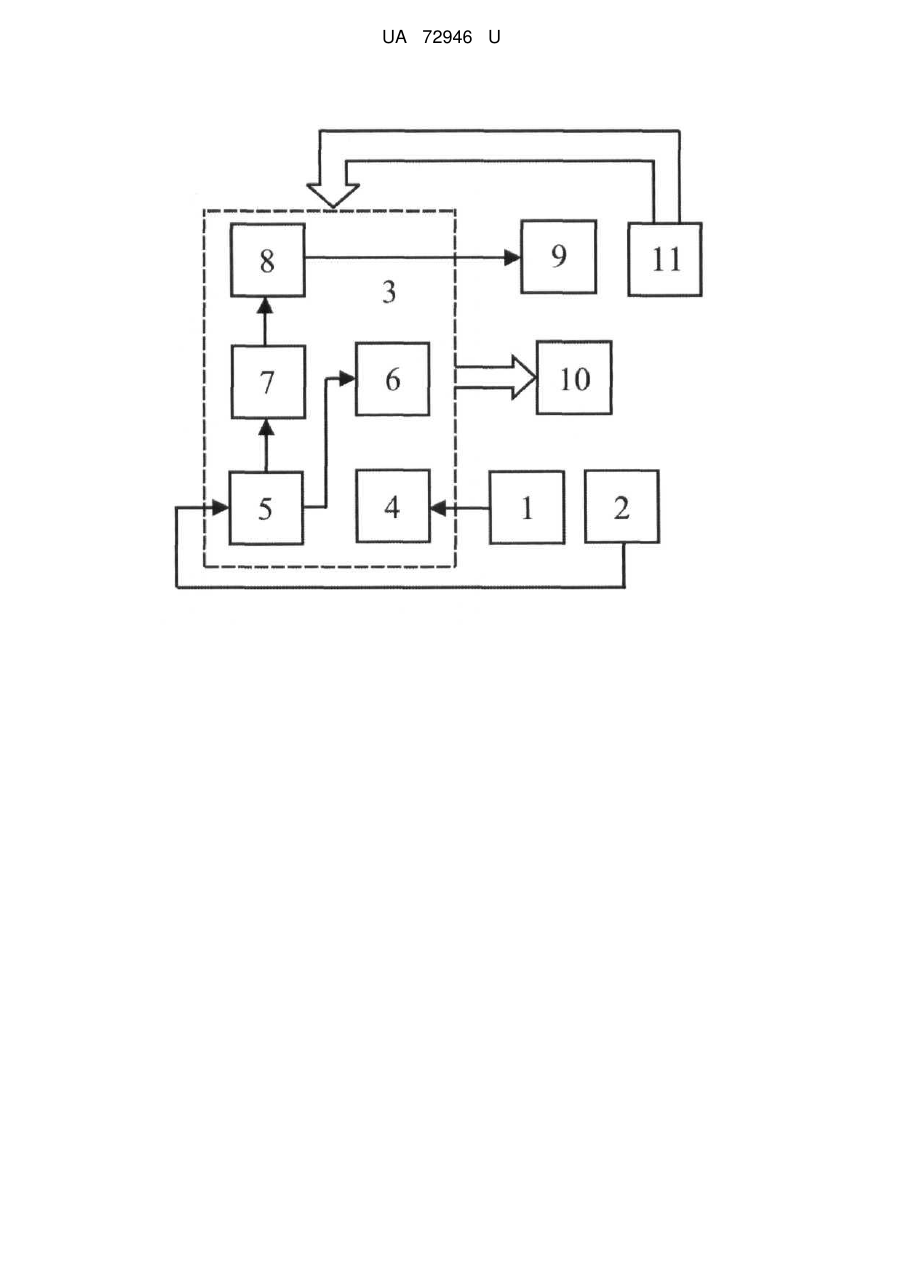
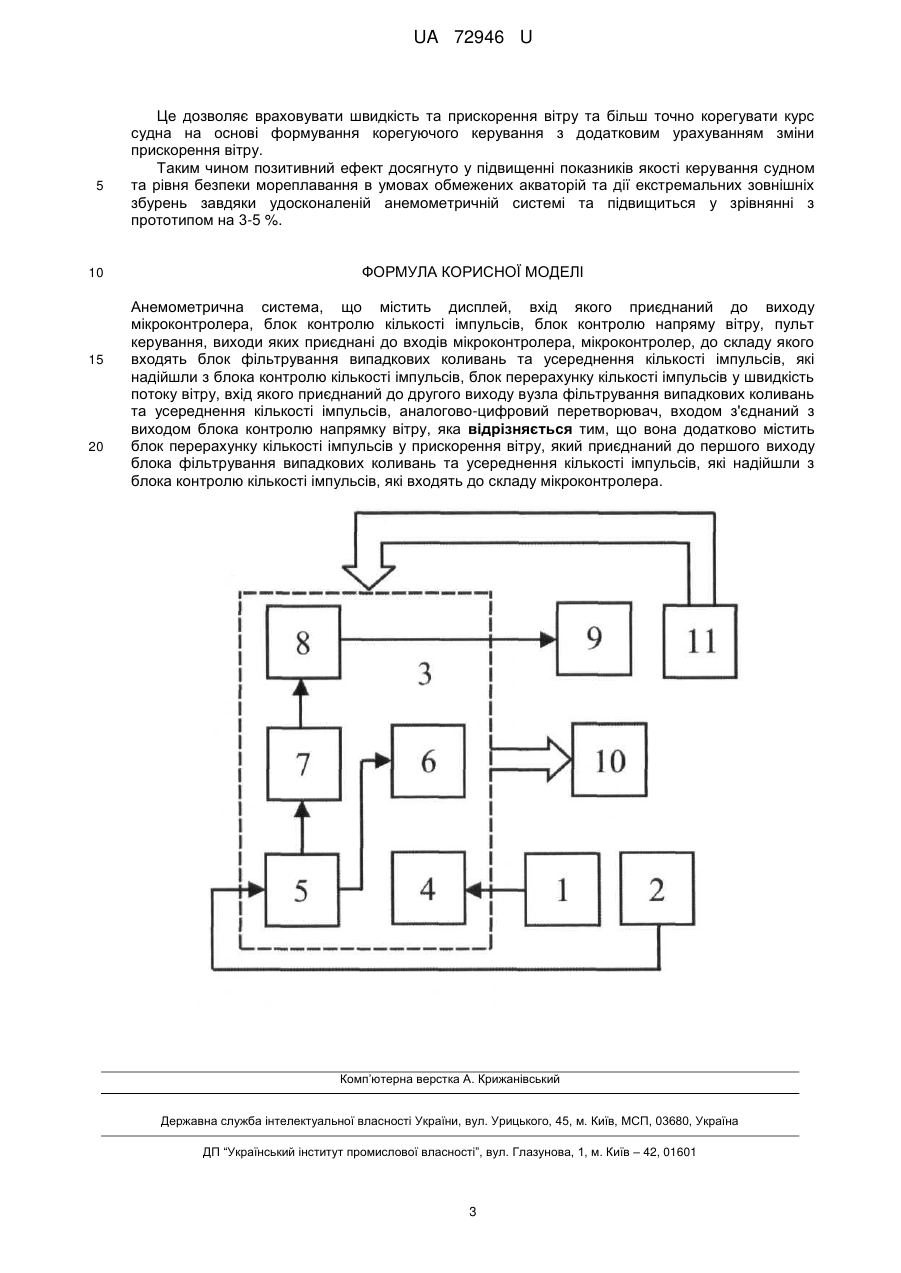
Реферат: Анемометрична система містить дисплей, вхід якого приєднаний до виходу мікроконтролера, блок контролю кількості імпульсів, блок контролю напряму вітру, пульт керування, виходи яких приєднані до входів мікроконтролера, мікроконтролер, до складу якого входять блок фільтрування випадкових коливань та усереднення кількості імпульсів, які надійшли з блока контролю кількості імпульсів, блок перерахунку кількості імпульсів у швидкість потоку вітру, вхід якого приєднаний до другого виходу вузла фільтрування випадкових коливань та усереднення кількості імпульсів, аналогово-цифровий перетворювач, входом з'єднаний з виходом блока контролю напрямку вітру. Система додатково містить блок перерахунку кількості імпульсів у прискорення вітру, який приєднаний до першого виходу блока фільтрування випадкових коливань та усереднення кількості імпульсів, які надійшли з блока контролю кількості імпульсів, які входять до складу мікроконтролера. UA 72946 U (54) АНЕМОМЕТРИЧНА СИСТЕМА UA 72946 U UA 72946 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до пристроїв суднової автоматики. Система дозволяє вимірювати швидкість, напрямок, та прискорення вітру, що дозволяє більш точно компенсувати його збурювальну силу і, таким чином, підвищити якість системи керування, поліпшити маневреність судна та безпеку мореплавання у прибережних водах і вузьких каналах. Відомо про анемометричну систему АПР-2 [заявка Російської Федерації № 98106769/20 від 14.04.1998, МПК G01P5/06, опубліковано 16.12.1998], що належить до класу електронних крильчастих систем, яка призначена для визначення швидкості повітряного потоку при метеорологічних вимірах на суші й морі, у шахтах і рудниках всіх категорій, а також у системах промислової вентиляції й кондиціонування повітря. Система занесена до Державного реєстру засобів вимірювання України. Вона складається із двох блоків: первинного перетворювача і вимірювального блока. Первинний перетворювач виконаний у корпусі, відлитому з удароміцної пластмаси. У циліндричній обичайці корпусу встановлена шестилопатева крильчатка з алюмінієвого сплаву з лопатками, закрученими під кут 45°. Вона посаджена на вісь, що пройшла спеціальну термообробку. Опори осі вмонтовані в латунні підп'ятники, розташовані на геометричній осі обичайки. У підставу корпусу закріплена котушка індуктивності, намотана на кільцевому феритовому сердечнику. Первинний перетворювач за допомогою уніфікованого штирового роз'єму з'єднується з висувною штангою і кріпиться до неї накидною гайкою. Висувна штанга виготовлена з тонкостінної труби, яка має спеціальне формування, котре перешкоджає її обертанню навколо продольної осі. У штанзі розміщений спіральний провідник, що з'єднує за допомогою роз'єма первинний перетворювач із вимірювальним блоком. У корпусі розміщені електронна схема, джерело живлення, органи керування й висувна штанга, на якій закріплений первинний перетворювач. У неробочому положенні анемометра первинний перетворювач знаходиться у спеціальній ніші корпусу, що надійно охороняє його від ушкодження. У верхній частині кришки корпусу розташоване оглядове віконце, закрите оргсклом, призначене для спостереження за показаннями індикатора. У ручці корпусу розташований відсік живлення, що закривається кришкою із гвинтом. Електронна схема змонтована на платі з фольгованого склотекстоліту із двосторонньою печаттю. На платі закріплені цифровий індикатор, мікроконтролер MCS51 і регулювальні елементи схеми. Подовжувач висувної штанги виконаний з тонкостінної труби, на кінцях якої вмонтовані роз'єми. З'єднання подовжувача з вимірювальним блоком і первинним перетворювачем здійснюється за допомогою різьбової втулки й накидної гайки. Але крильчатка анемометра досить швидко втрачає чутливість, що може приводити до отримання невірних результатів вимірювання. Крім того у даній анемомтеричній системі неможливе достовірне вимірювання малих швидкостей потоку в області 0,1 м/с. За прототип прийнято анемометричну систему [патент України № 52444 від 25.08.2010, МПК G01P5/00], яка складається з блока контролю швидкості вітру, блока контролю напряму вітру, пульта керування, мікроконтролера, до складу якого входять блок усереднення кількості імпульсів, та блок фільтрування випадкових коливань, блока перерахунку кількості імпульсів у швидкість потоку вітру, які з'єднані з вузлом контролю швидкості, аналогово-цифровий перетворювач, входом з'єднаний з виходом блока контролю напрямку вітру. У блоці контролю напрямку вітру використано шістнадцятирумбову систему, його вихід з'єднаний через аналогово-цифровий перетворювач мікроконтролера з LCD - дисплеєм, блок контролю швидкості сполучений з блоком перерахунків кількості імпульсів в швидкість вітру, вихід якого з'єднаний з блоком усереднення параметрів швидкості вітру, вихід якого зв'язаний з блоком контролю швидкості вітру по заданому значенню та блоком аварійної сигналізації. В основу винаходу поставлено задачу удосконалення анемометричної системи, конструкцію якої доповнено блоком перерахунку кількості імпульсів у прискорення вітру, за рахунок чого з'являється можливість корегування курсу судна з врахуванням прискорення вітру, що дозволяє підвищити маневреність судна та безпеку мореплавства. Поставлена задача вирішується тим, що: в анемометричній системі, що складається з: дисплею, вхід якого приєднано до виходу мікроконтролера, блока контролю кількості імпульсів, блока контролю напряму вітру, пульта керування, виходи яких приєднано до входів мікроконтролера, мікроконтролера, до складу якого входять блок фільтрування випадкових коливань та усереднення кількості імпульсів, які надійшли з блока контролю кількості імпульсів, блок перерахунку кількості імпульсів у швидкість потоку вітру, вхід якого приєднаний до другого виходу вузла фільтрування випадкових коливань та усереднення кількості імпульсів, аналогово-цифровий перетворювач, входом з'єднаний з виходом блока контролю напрямку вітру, згідно з пропозиціями авторів, додано блок перерахунку кількості імпульсів у прискорення вітру, який приєднано до першого виходу блока 1 UA 72946 U фільтрування випадкових коливань та усереднення кількості імпульсів, які надійшли з блока контролю кількості імпульсів, які входять до складу мікроконтролера. В блоці перерахунку кількості імпульсів у прискорення вітру відбувається перерахування за допомогою програмного забезпечення у чисельне значення прискорення вітру за формулою 5 a 2r (n1 n0 ) T 10 15 20 25 30 35 40 45 50 2 - число імпульсів, що надійшли з датчика, n0 - число обертів, яке було виміряне раніше на попередньому відрізку часу, T - час, в перебігу якого робиться підрахунок імпульсів з оптичного датчика. При підстановці значень за період вісім секунд формула приймає вигляд: a 0,001275 (n1 n0 ) , тобто, для розглянутої конфігурації коефіцієнт дорівнює k 0,001275; усереднення прискорення вітру розраховується за менший відрізок часу. За рахунок цього поліпшується якість системи керування судном, що дозволяє підвищити рівень безпеки мореплавання у прибережних водах і вузьких каналах. На фіг. представлено блок-схему анемометричної системи. Виходи вузла контролю напряму вітру 1, який використовує шістнадцятирумбову систему блока контролю кількості імпульсів 2, підключено до входів мікроконтролера 3; вихід блока контролю напряму вітру 1 з'єднано з входом блока аналого-цифрового перетворювача 4, блок контролю кількості імпульсів 2 з'єднано з блоком фільтрування випадкових коливань та усереднення кількості імпульсів 5, перший вихід якого приєднано до входу блока перерахунку кількості імпульсів у прискорення вітру 6, другий вихід блока усереднення кількості імпульсів та фільтрування випадкових коливань 5 приєднано до входу блока перерахунку кількості імпульсів у швидкість потоку вітру 7, який пов'язаний з блоком контролю швидкості вітру по заданому значенню 8, що з'єднаний з блоком світлової та звукової індикації 9. Крім того, мікроконтролерний блок 3 призначений для подачі даних у процесі вимірювання на LCDдисплей 10, блок пульта керування 11 призначений для задання режимів роботи системи. Додатково введений блок перерахунку кількості імпульсів у прискорення вітру 6 реалізований програмно на програмній мові C++. Анемометрична система реалізується таким чином. При подачі основної живлячої напруги +5V, +12V на електронні блоки, починає проводитись ініціювання таймерів, робочих регістрів, програмних бітів, LCD-дисплея 10. При виборі певного режиму роботи та натисканні кнопки "Старт" на пульті керування 11 починається ініціювання основних елементів пам'яті і допоміжних регістрів перед початком вимірювання швидкості вітру. Відбувається старт таймера-лічильника на рахунок імпульсів від джерела збуджувальної сили. При досяганні лічильником часу вимірювання швидкості вітру значення константи, лічильник зупиняється, а значення кількості імпульсів, нарахованих лічильником у блоці контролю кількості імпульсів 2, надходить до блока усереднення кількості імпульсів та фільтрування випадкових коливань 5, що входить до складу мікропроцесора 3, потім виконується виклик блока 7, що виконує перерахунок числа імпульсів у швидкість потоку вітру. У блоці контролю швидкості вітру по заданому значенню 8 відбувається порівнювання виміряного значення швидкості вітру з заданою константою. Якщо значення виміряної швидкості не перевищує константи, то відбувається виведення інформації на LCD-дисплей 10, якщо значення виміряної швидкості вітру більше ніж задана константа, то з блока контролю швидкості вітру по заданому значенню 8 на блок аварійної сигналізації 9 подається тривожний сигнал, після цього необхідно за допомогою пульта керування 11 вибрати більше за попереднє граничне значення швидкості вітру, потім вимір починається спочатку. При визначенні напряму вітру вихідний сигнал з вузла 1 подається на блок аналого-цифрового перетворювача 4, після обробки отримана інформація відображається на LCD-дисплеї 10. При знаходженні прискорення вітру значення кількості імпульсів надходить з блока контролю кількості імпульсів 2 на вхід блока усереднення кількості імпульсів та фільтрування випадкових коливань 5, вихідний сигнал з якого зі значенням цілої кількості імпульсів надходить до входу блока перерахунку кількості імпульсів у прискорення вітру 6, де відбувається перерахування у чисельне значення прискорення вітру по формулі a 2r (n1 n0 ) T 55 2 (м/с ), де a - прискорення вітру, r - радіус кола, по якому рухається прапорець, n1 2 2 , (м/с ), де a - прискорення вітру, r- радіус кола, по якому рухається прапорець, n1 - число обертів за хвилину, n0 - число обертів, яке було виміряне раніше на попередньому відрізку часу, T - час, в перебігу якого робиться підрахунок імпульсів з оптичного датчика у прискорення вітру, яке потім відображається на LCD- дисплеї 12. Для отримання більш точної інформації процедура перерахунку прискорення вітру виконується кожні вісім секунд. 2 UA 72946 U 5 10 15 20 Це дозволяє враховувати швидкість та прискорення вітру та більш точно корегувати курс судна на основі формування корегуючого керування з додатковим урахуванням зміни прискорення вітру. Таким чином позитивний ефект досягнуто у підвищенні показників якості керування судном та рівня безпеки мореплавання в умовах обмежених акваторій та дії екстремальних зовнішніх збурень завдяки удосконаленій анемометричній системі та підвищиться у зрівнянні з прототипом на 3-5 %. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Анемометрична система, що містить дисплей, вхід якого приєднаний до виходу мікроконтролера, блок контролю кількості імпульсів, блок контролю напряму вітру, пульт керування, виходи яких приєднані до входів мікроконтролера, мікроконтролер, до складу якого входять блок фільтрування випадкових коливань та усереднення кількості імпульсів, які надійшли з блока контролю кількості імпульсів, блок перерахунку кількості імпульсів у швидкість потоку вітру, вхід якого приєднаний до другого виходу вузла фільтрування випадкових коливань та усереднення кількості імпульсів, аналогово-цифровий перетворювач, входом з'єднаний з виходом блока контролю напрямку вітру, яка відрізняється тим, що вона додатково містить блок перерахунку кількості імпульсів у прискорення вітру, який приєднаний до першого виходу блока фільтрування випадкових коливань та усереднення кількості імпульсів, які надійшли з блока контролю кількості імпульсів, які входять до складу мікроконтролера. Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюAnemometric system
Автори англійськоюTymchenko Viktor Leonidovych, Tymchenko Inna Viktorivna, Kuklina Kateryna Oleksiivna
Назва патенту російськоюАнемометрическая система
Автори російськоюТымченко Виктор Леонидович, Тымченко Инна Викторовна, Куклина Екатерина Алексеевна
МПК / Мітки
МПК: G01P 5/06
Мітки: анемометрична, система
Код посилання
<a href="https://ua.patents.su/5-72946-anemometrichna-sistema.html" target="_blank" rel="follow" title="База патентів України">Анемометрична система</a>
Анемометрична система
Номер патенту: 52444
Опубліковано: 25.08.2010
Автори: Тимченко Іна Вікторівна, Кукліна Катерина Олексіївна, Тимченко Віктор Леонідович
МПК: G01P 5/00
Мітки: система, анемометрична
Формула / Реферат:
Анемометрична система, що складається з блока контролю швидкості вітру, блока контролю напряму вітру, пульта керування, мікроконтролера, до складу якого входять блок усереднення кількості імпульсів та фільтрування випадкових коливань, блок перерахунку кількості імпульсів у швидкість потоку вітру, які з'єднані з вузлом контролю швидкості, аналогово-цифровий перетворювач входом з'єднаний з виходом блока контролю напрямку вітру, яка...
Універсальна навчальна мікроконтролерна система
Номер патенту: 13540
Опубліковано: 17.04.2006
Автори: Джулгаков Віталій Георгійович, Захарченко Яна Володимірівна, Руденко Кирил Ігоревич, Єрешкіна Катерина Олександрівна
МПК: G06F 15/76
Мітки: універсальна, система, навчальна, мікроконтролерна
Формула / Реферат:
Універсальна навчальна мікроконтролерна система, що містить блок головного мікроконтролера, джерело живлення, блок відображення інформації, яка відрізняється тим, що в неї введено імітатор датчиків та периферійний мікроконтролер, вхід якого з'єднаний з імітатором датчиків, а вихід – з другим входом головного мікроконтролера, перший вхід якого з'єднаний з персональною обчислювальною електронною машиною, а вихід з'єднаний з входом блока...
Система регулювання вітроенергетичною установкою
Номер патенту: 50687
Опубліковано: 25.06.2010
Автори: Субота Анатолій Максимович, Пономаренко Тамара Ігорівна, Кулік Анатолій Степанович, Гаєвая Діана Олександрівна
МПК: F03D 7/04, F03D 7/02, F03D 7/00
Мітки: регулювання, вітроенергетичною, установкою, система
Формула / Реферат:
Система управління вітроенергетичною установкою, що містить регулятор, анемометри, датчики зворотнього зв'язку, яка відрізняється тим, що послідовно з'єднані між собою виходами з входами відповідно підсилювач потужності, електродвигун сервоприводу, виходи анемометрів горизонтальної складової швидкості вітру з'єднані відповідно з першим і другим входами блока обробки повітряної швидкості, виходи анемометрів вертикальної складової швидкості...
Система управління процесом снування
Номер патенту: 8438
Опубліковано: 15.08.2005
Автор: Клименко Дмитро Сергійович
МПК: D02H 13/00
Мітки: управління, снування, процесом, система
Формула / Реферат:
Система управління процесом снування, що містить пульт управління, систему управління, снувальну машину, датчик обриву ниток, датчик лінійної швидкості снування, датчик натягу, блок вимірювання та контролю натягу, яка відрізняється тим, що датчик натягу виконано акустичним з направленим резонатором, а блок вимірювання та контролю натягнення виконано на базі мікроконтролера, а управління натягом ниток виконується одночасно для всіх ниток...
Автоматизована система розробки діагностичного забезпечення

Номер патенту: 17803
Опубліковано: 16.10.2006
Автори: Гавриленко Олег Іванович, Тетеревятніков Дмитро Володимирович, Мирна Олена Володимирівна, Циганкова Ольга Анатоліївна
МПК: G06F 15/00
Мітки: діагностичного, розробки, система, забезпечення, автоматизована
Формула / Реферат:
Автоматизована система розробки діагностичного забезпечення, що містить інформаційну шину, вихідну шину, блок допускового контролю, два блоки пам'яті, причому виходи першого блока пам'яті з'єднані з першою групою блока допускового контролю, формувач діагностичної моделі, блок одержання оцінок діагностичних ознак, блок моделювання номінального процесу, аналізатор відхилень ознак, аналізатор місця відмов, причому інформаційна шина з'єднана з...
Попередній патент: Композиція для захисту інкубаційних яєць курей
Наступний патент: Рейковий пристрій для установок підземного видобування
Випадковий патент: Ґрунтообробний робочий орган