Модуль лінійного переміщення
Номер патенту: 73495
Опубліковано: 25.09.2012
Автори: Кузнєцов Юрій Миколайович, Степаненко Олександр Олександрович, Рожко Оксана Ігорівна

Формула / Реферат
Модуль лінійного переміщення, що містить несучу систему, виконану у вигляді двох циліндричних напрямних, між якими на одній осі розміщені кроковий двигун, муфта, ходовий гвинт і каретка з можливістю повздовжнього руху по цих напрямних, а система кріплення модуля виконана у вигляді двох обертових вузлів, які розміщені по обидва кінці напрямних з можливістю обертання на кут 180° і кріплення у будь-якій площині під будь-яким кутом, який відрізняється тим, що між ходовим гвинтом та напрямними розташовані дві додаткові циліндричні штанги, одні кінці яких нерухомо кріпляться до каретки, а інші кінці наскрізь проходять через один з обертових вузлів системи кріплення модуля, в якому розміщені втулки ковзання, і жорстко з'єднані між собою.
Текст
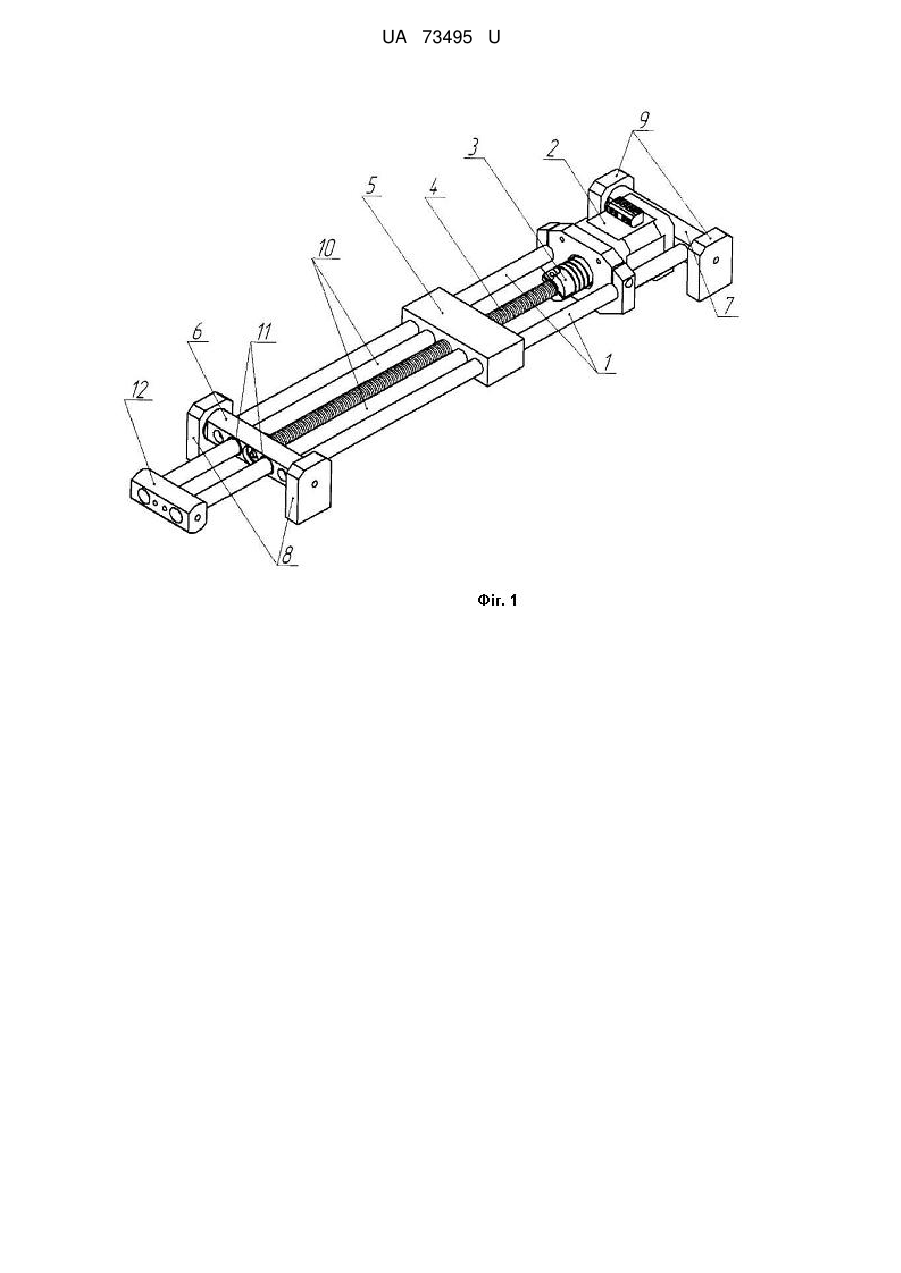
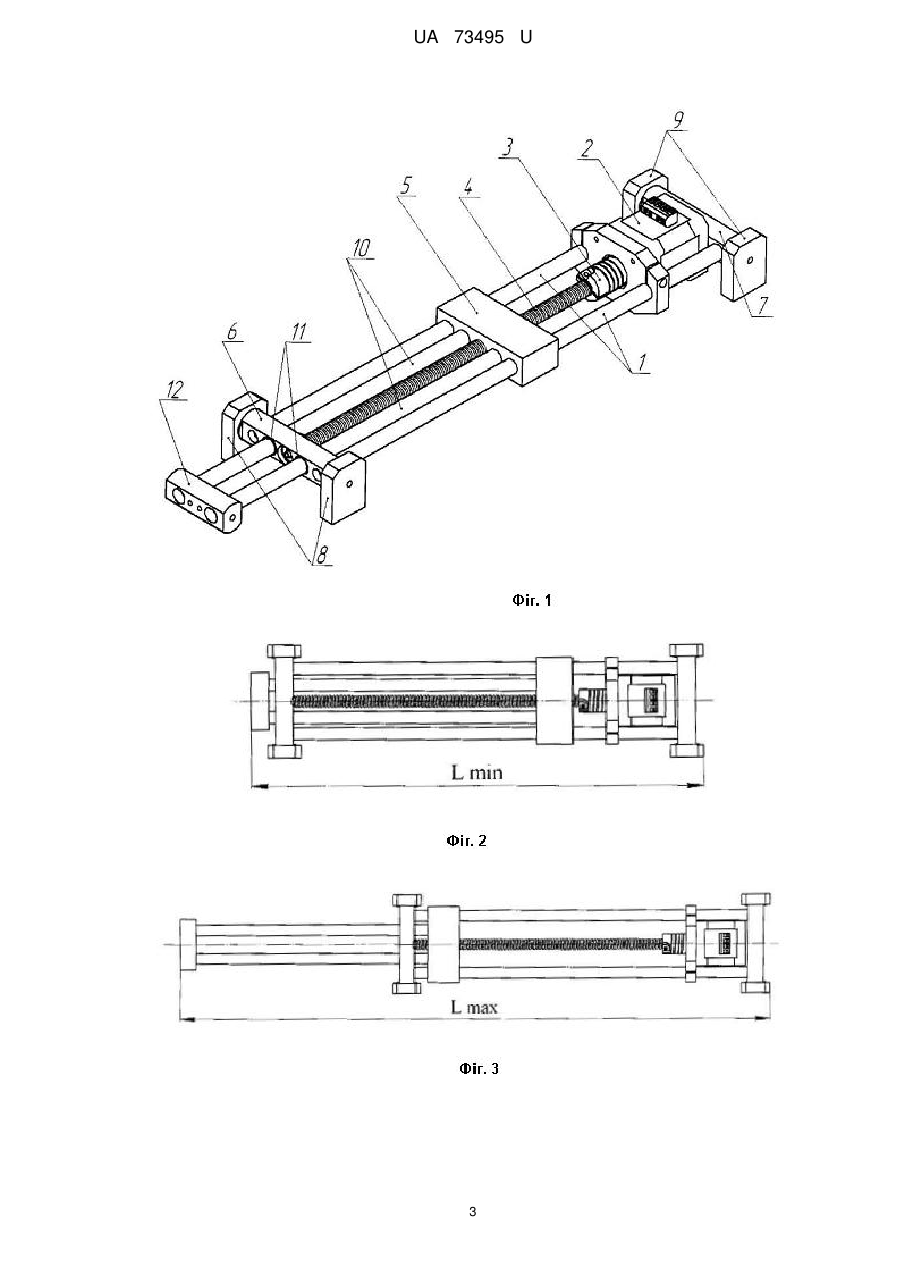
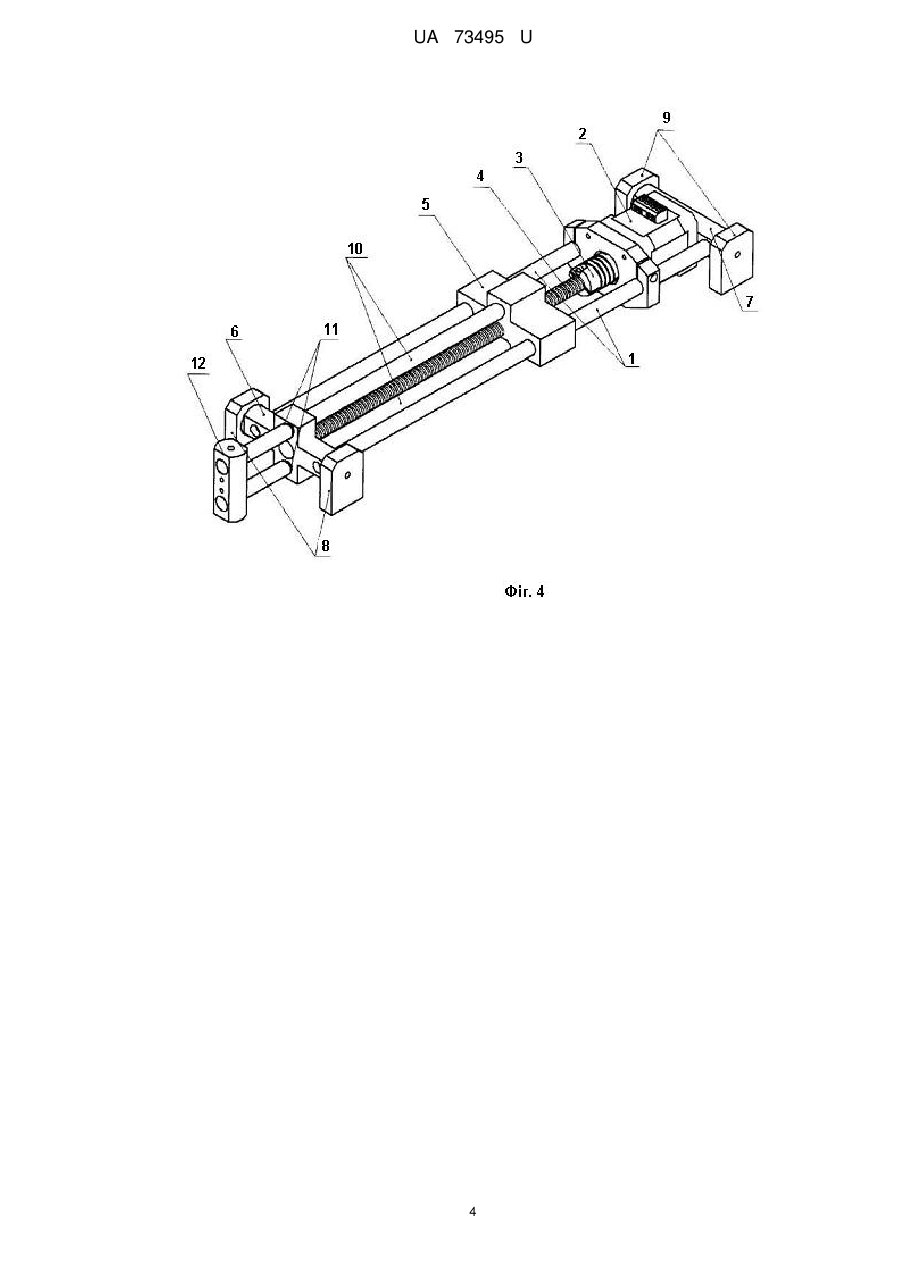
Реферат: Модуль лінійного переміщення містить несучу систему, виконану у вигляді двох циліндричних напрямних, між якими на одній осі розміщені кроковий двигун, муфта, ходовий гвинт і каретка з можливістю повздовжнього руху по цих напрямних, а система кріплення модуля виконана у вигляді двох обертових вузлів, які розміщені по обидва кінці напрямних з можливістю обертання на кут 180° і кріплення у будь-якій площині під будь-яким кутом. Між ходовим гвинтом та напрямними розташовані дві додаткові циліндричні штанги, одні кінці яких нерухомо кріпляться до каретки, а інші кінці наскрізь проходять через один з обертових вузлів системи кріплення модуля, в якому розміщені втулки ковзання, і жорстко з'єднані між собою. UA 73495 U (54) МОДУЛЬ ЛІНІЙНОГО ПЕРЕМІЩЕННЯ UA 73495 U UA 73495 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі верстатобудування, а саме, до модульного принципу побудови верстатів з паралельною кінематикою і може бути використана для створення верстатів різноманітних каркасних компоновок на модульному принципі з механізмами паралельної структури. Відомий модуль-штанга (див., наприклад [1]), тіло якої складається з двох стрижнів, сполучених між собою з поздовжнім перекриттям, на зовнішніх кінцях яких виконані елементи шарнірів, а сполучення стрижнів виконані з можливістю відносного зміщення вздовж лінії центрів шарнірів. Недоліком даного модулю є: по-перше висока металоємність конструкції, подруге недостатня універсальність, що обмежує сферу використання модуля. Відомий також модуль лінійного переміщення [2] (прийнятий як прототип), що містить несучу систему, виконану у вигляді двох циліндричних напрямних, між якими на одній осі розміщені кроковий двигун, муфта, ходовий гвинт і каретка з можливістю повздовжнього руху по цих напрямних, а система кріплення модуля виконана у вигляді двох обертових вузлів, які розміщені по обидва кінці напрямних з можливістю обертання на кут 180° і кріплення у будь-якій площині під будь-яким кутом. Недоліком модулю є недостатня функціональність, а саме відсутність можливості зміни його довжини. В основу корисної моделі поставлена задача удосконалення модуля лінійного переміщення шляхом того, що між ходовим гвинтом та напрямними розташовані дві додаткові циліндричні штанги, одні кінці яких нерухомо кріпляться до каретки, а інші кінці наскрізь проходять через один з обертових вузлів системи кріплення модуля, в якому розміщені втулки ковзання, і жорстко з'єднані між собою, що дозволяє досягнути технічний результат - розширення функціональних можливостей, а саме зміни довжини модуля. Розв'язання задачі досягається тим, що в модулі лінійного переміщення, що містить несучу систему, виконану у вигляді двох циліндричних напрямних, між якими на одній осі розміщені кроковий двигун, муфта, ходовий гвинт і каретка з можливістю повздовжнього руху по цих напрямних, а система кріплення модуля виконана у вигляді двох обертових вузлів, які розміщені по обидва кінці напрямних з можливістю обертання на кут 180° і кріплення у будь-якій площині під будь-яким кутом, новим є те, що між ходовим гвинтом та напрямними розташовані дві додаткові циліндричні штанги, одні кінці яких нерухомо кріпляться до каретки, а інші кінці наскрізь через один з обертових вузлів системи кріплення модуля, в якому розміщені втулки ковзання, і жорстко з'єднані між собою. Використання циліндричних напрямних зменшує металоємність конструкції, а встановлення двох додаткових штанг розширює функціональні можливості модуля. Таким чином досягається бажаний технічний результат. Суть корисної моделі пояснюється кресленнями, де на фіг. 1 зображений загальний вигляд модуля в аксонометрії, на фіг. 2 модуль в стані мінімальної довжини, на фіг. 3 модуль в стані максимальної довжини, на фіг. 4 зображено можливий варіант компоновки модуля з перехресним розташуванням штанг, на фіг. 5 зображено приклад використання модуля в механізмі з паралельною кінематикою типу "трипод". Модуль (фіг. 1) містить несучу систему у вигляді двох циліндричних напрямних 1, до яких прикріплений кроковий двигун 2, обертовий момент від двигуна 2 через муфту 3 передається на ходовий гвинт 4, який приводить до руху каретку 5 за рахунок різьби в ній. Обидва кінці напрямних 1 закріплені в циліндрах 6 та 7, які обертаються і фіксуються в необхідному положенні в передніх та задніх опорах 8 та 9. Між ходовим гвинтом 4 та напрямними 1 в одній площині розташовані дві додаткові циліндричні штанги 10, одні кінці яких нерухомо кріпляться до каретки 5, а інші кінці наскрізь проходять через циліндр кріплення модуля 6, в якому знаходяться втулки ковзання 11, і нерухомо з'єднані між собою кріпленням 12. Принцип дії модуля наступний: кроковий двигун 2 передає обертовий момент через муфту 3 на ходовий гвинт 4, який приводить до руху каретку 5, за рахунок різьби в ній. Каретка 5 рухається лінійно по напрямним 1 і переміщує жорстко зв'язані з нею штанги 10, які наскрізь проходять через циліндр системи кріплення модуля 6. Таким чином, рухаючись лінійно вперед чи назад, штанги 10 змінюють довжину модуля. Модуль (фіг. 2 та фіг. 3) зображений в стані своєї мінімальної та максимальної довжини (Lmin та Lmax), що дає максимальне переміщення H=Lmax-Lmin. На фіг. 4 зображено можливу компоновку модуля з перехресним розташуванням штанг, який містить несучу систему у вигляді двох циліндричних напрямних 1, до яких прикріплений кроковий двигун 2, обертовий момент від двигуна 2 через муфту 3 передається на ходовий гвинт 4, який приводить до руху каретку 5 за рахунок різьби в ній. Обидва кінці напрямних 1 закріплені в циліндрах 6 та 7, які обертаються і фіксуються в необхідному положенні в передніх та задніх опорах 8 та 9. З обох сторін ходового гвинта 4 в одній площині перпендикулярно напрямним 1 розташовані дві додаткові циліндричні штанги 10, одні кінці яких нерухомо 1 UA 73495 U 5 10 15 20 кріпляться до каретки 5, а інші кінці наскрізь проходять через кріплення модуля 6, в якому знаходяться втулки ковзання 11, і нерухомо з'єднані між собою кріпленням 12. На фіг. 5 зображено приклад використання модуля в механізмі з паралельною кінематикою типу "трипод", який складається з верхньої та нижньої основ 1 та 2, які шарнірно зв'язані між собою трьома модулями. Таким чином, змінюючи довжину модулів, можна керувати положенням верхньої основи 1 відносно нижньої основи 2. З врахуванням форми каркасу несучої систему верстату забезпечується задана величина переміщення по керованим координатам. Наприклад, для пірамідальної компоновки з кутом нахилу модуля а задане переміщення по вертикальній координаті дорівнює: Z=H*cos=(Lmax-Lmin)cos. Модуль лінійного переміщення змінної довжини може знайти широке використання у верстатобудуванні для створення верстатів нового покоління з паралельною кінематикою на модульному принципі [3], а також в навчальному процесі у ВНЗ для вивчення і дослідження механізмів паралельної структури. Крім того, модуль лінійного переміщення може знайти широке використання в робототехніці для побудови високошвидкісних роботів-маніпуляторів нового покоління. Джерела інформації: 1. Патент України на корисну модель № 52737. Штанга. Самойленко О.В., Кузнецов Ю.М., Подольський М.І. МПК F16C 7/00, опубл. 10.09.2010, бюл. № 17. 2. Заявка № U201108135 від 29.06.11 на патент України (позитивне рішення від 21.11.2011) Модуль лінійного переміщення. Кузнецов Ю.М., Степаненко О.О. 3. Кузнецов Ю.М., Дмитрієв Д.О., Діневич Г.Ю. Компоновки верстатів з механізмами паралельної структури / Під ред. Ю.М. Кузнецова. -Херсон: ПП Вишемирський B.C., 2009.-456 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 Модуль лінійного переміщення, що містить несучу систему, виконану у вигляді двох циліндричних напрямних, між якими на одній осі розміщені кроковий двигун, муфта, ходовий гвинт і каретка з можливістю повздовжнього руху по цих напрямних, а система кріплення модуля виконана у вигляді двох обертових вузлів, які розміщені по обидва кінці напрямних з можливістю обертання на кут 180° і кріплення у будь-якій площині під будь-яким кутом, який відрізняється тим, що між ходовим гвинтом та напрямними розташовані дві додаткові циліндричні штанги, одні кінці яких нерухомо кріпляться до каретки, а інші кінці наскрізь проходять через один з обертових вузлів системи кріплення модуля, в якому розміщені втулки ковзання, і жорстко з'єднані між собою. 2 UA 73495 U 3 UA 73495 U 4 UA 73495 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюModule of linear movement
Автори англійськоюKuznietsov Yurii Mykolaiovych, Stepanenko Oleksandr Oleksandrovych, Rozhko Oksana Ihorevna
Назва патенту російськоюМодуль линейного перемещения
Автори російськоюКузнецов Юрий Николаевич, Степаненко Александр Александрович, Рожко Оксана Игоревна
МПК / Мітки
Мітки: модуль, переміщення, лінійного
Код посилання
<a href="https://ua.patents.su/7-73495-modul-linijjnogo-peremishhennya.html" target="_blank" rel="follow" title="База патентів України">Модуль лінійного переміщення</a>
Модуль лінійного переміщення
Номер патенту: 68238
Опубліковано: 26.03.2012
Автори: Степаненко Олександр Олександрович, Кузнєцов Юрій Миколайович
Мітки: лінійного, переміщення, модуль
Формула / Реферат:
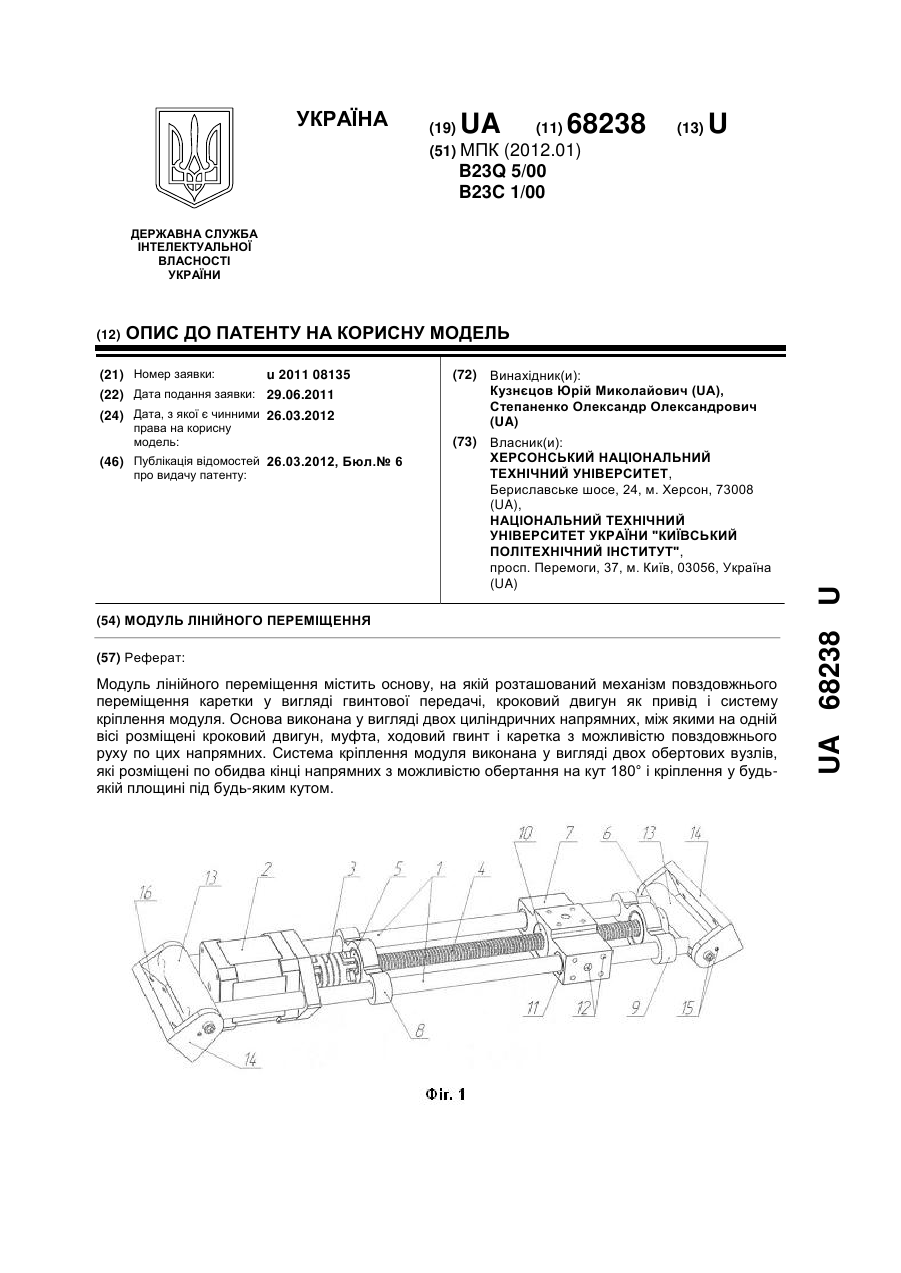
Модуль лінійного переміщення, що містить основу, на якій розташований механізм повздовжнього переміщення каретки у вигляді гвинтової передачі, кроковий двигун як привід і систему кріплення модуля, який відрізняється тим, що основа виконана у вигляді двох циліндричних напрямних, між якими на одній осі розміщені кроковий двигун, муфта, ходовий гвинт і каретка з можливістю повздовжнього руху по цих напрямних, а система кріплення модуля виконана...
Модуль лінійного індукційного прискорювача
Номер патенту: 72041
Опубліковано: 10.08.2012
Автори: Ложкін Руслан Сергіович, Корнілов Євген Олександрович, Гурин Анатолій Григорович
МПК: H05H 11/00, H01L 27/00, H05H 9/00
Мітки: модуль, індукційного, прискорювача, лінійного
Формула / Реферат:
Модуль лінійного індукційного прискорювача, який містить корпус, індуктори, вакуумні ізолятори, центральні електроди, в яких розташовані котушки фокусування і металеві дрейфові трубки, який відрізняється тим, що індуктори розміщені по радіусу між градієнтними електродами вздовж кожного плоского вакуумного ізолятора, при цьому від джерела живлення до кожного первинного витка індукторів послідовно підведено окремий енергопровід, хвильовий опір...
Датчик лінійного переміщення
Номер патенту: 61304
Опубліковано: 11.07.2011
Автори: Маренич Марина Володимирівна, Черепащук Григорій Олександрович
МПК: G01B 7/00
Мітки: датчик, лінійного, переміщення
Формула / Реферат:
Датчик лінійного переміщення, що містить дві котушки індуктивності, сердечник, що встановлений з можливістю руху вздовж осі котушок індуктивності, та пов'язаний з ним шток циліндричної форми, який відрізняється тим, що котушки індуктивності з'єднані послідовно та утворюють індуктивний півміст, кожна з них намотана на свою половину каркаса, містить дві трубки однакової довжини, які нерухомо закріплені в осьовому отворі сердечника, з одного...
Гідравлічний механізм лінійного переміщення фізичного тіла

Номер патенту: 31442
Опубліковано: 15.12.2000
Автор: Романіка Костянтин Васильович
МПК: B23B 3/00
Мітки: гідравлічний, переміщення, фізичного, тіла, лінійного, механізм
Текст:
...напряму його пере ( міщений [ Поставлена мета досягається тим, ш вказаний клапон вике* 4 наний з можливість^ обертання навкруги своєї ©сі І має по періметру необмежену КІЛЬКІСТЬ отворів різного діаметру , рри цьоіцу на одНІй осі з клапоном установлений лімб розділений на КІЛЬКІСТЬ відрізків, що відповідають КІЛЬКОСТІ отворів в клалоні, а пдя зміни напряму руху супорта, паралельно з валиком, що звязаний з вагою, установлений допоміжний...
Модуль горизонтального переміщення з безштоковими циліндрами
Номер патенту: 72161
Опубліковано: 10.08.2012
Автори: Якимчук Микола Володимирович, Іванова Людмила Іллівна, Мазур Богдан Васильович
МПК: F15B 13/00, F15B 9/00
Мітки: модуль, переміщення, горизонтального, циліндрами, безштоковими
Формула / Реферат:
Модуль горизонтального переміщення з безштоковими циліндрами містить корпус профільного перерізу з повздовжнім прорізом і кришками, поршень, з'єднаний з кареткою, який відрізняється тим, що пристрій має два безштокових циліндри, кожен з яких виконано у вигляді корпусу профільного перерізу з повздовжнім прорізом, в якому розташовано два поршні, з'єднані з кареткою, в нижній частині одного корпусу розміщено датчик положення, корпуси з'єднані з...
Попередній патент: Багатопозиційний пневмоелектричний привод
Наступний патент: Спосіб виготовлення кільцевих деталей
Випадковий патент: Спосіб імунокорекції хворих на еритематозно-бульозну бешиху на тлі вторинного імунодефіциту