Пристрій для визначення місцеположення рейкового рухомого об’єкта
Формула / Реферат
Пристрій для визначення місцеположення рейкового рухомого об'єкта, що містить першу потокочутливу магнітну головку, підключену до першого входу першого фазового детектора, другий вхід якого з'єднаний з другою потокочутливою магнітною головкою, та сполучену через другий фазовий детектор та перший пороговий елемент з входом першого елемента НІ, третю потокочутливу магнітну головку, розташовану проти рейки між робочими зазорами першої, другої та третьої потокочутливих магнітних головок, розміщених на відстані ширини робочого зазору головки запису, та зв'язану через третій фазовий детектор та другий пороговий елемент з входом другого елемента НІ, та елемент І, підключений до входу індикатора, до виходів першого та другого елементів НІ та до виходів третього та четвертого порогових елементів, входи яких з'єднані з виходами першого фазового детектора, четверту потокочутливу магнітну головку, підключену до першого входу четвертого фазового детектора, другий вхід якого з'єднаний з п'ятою потокочутливою магнітною головкою, та сполучену через п'ятий фазовий детектор та п'ятий пороговий елемент з входом третього елемента НІ, шосту потокочутливу магнітну головку, розташовану проти рейки між робочими зазорами четвертої та п'ятої потокочутливих магнітних головок, розміщених на відстані ширини робочого зазору головки запису, та зв'язану через шостий фазовий детектор та шостий пороговий елемент з входом четвертого елемента НІ, при цьому елемент І підключений до виходів третього та четвертого елементів НІ та до виходів сьомого та восьмого порогових елементів, входи яких з'єднані з виходами четвертого фазового детектора, а третя та шоста потокочутливі магнітні головки розташовані одна від одної на відстані, що дорівнює розрядному інтервалу, який відрізняється тим, що розташовано сьому, восьму, дев'яту та десяту потокочутливі магнітні головки, які зміщені відповідно від першої, другої, четвертої та п'ятої потокочутливих магнітних головок на відстань, що дорівнює половині товщині полюса головки для поздовжнього запису, при цьому сьому, восьму, дев'яту та десяту потокочутливі магнітні головки підключено через фазовий детектор та пороговий елемент до входів елемента І.
Текст
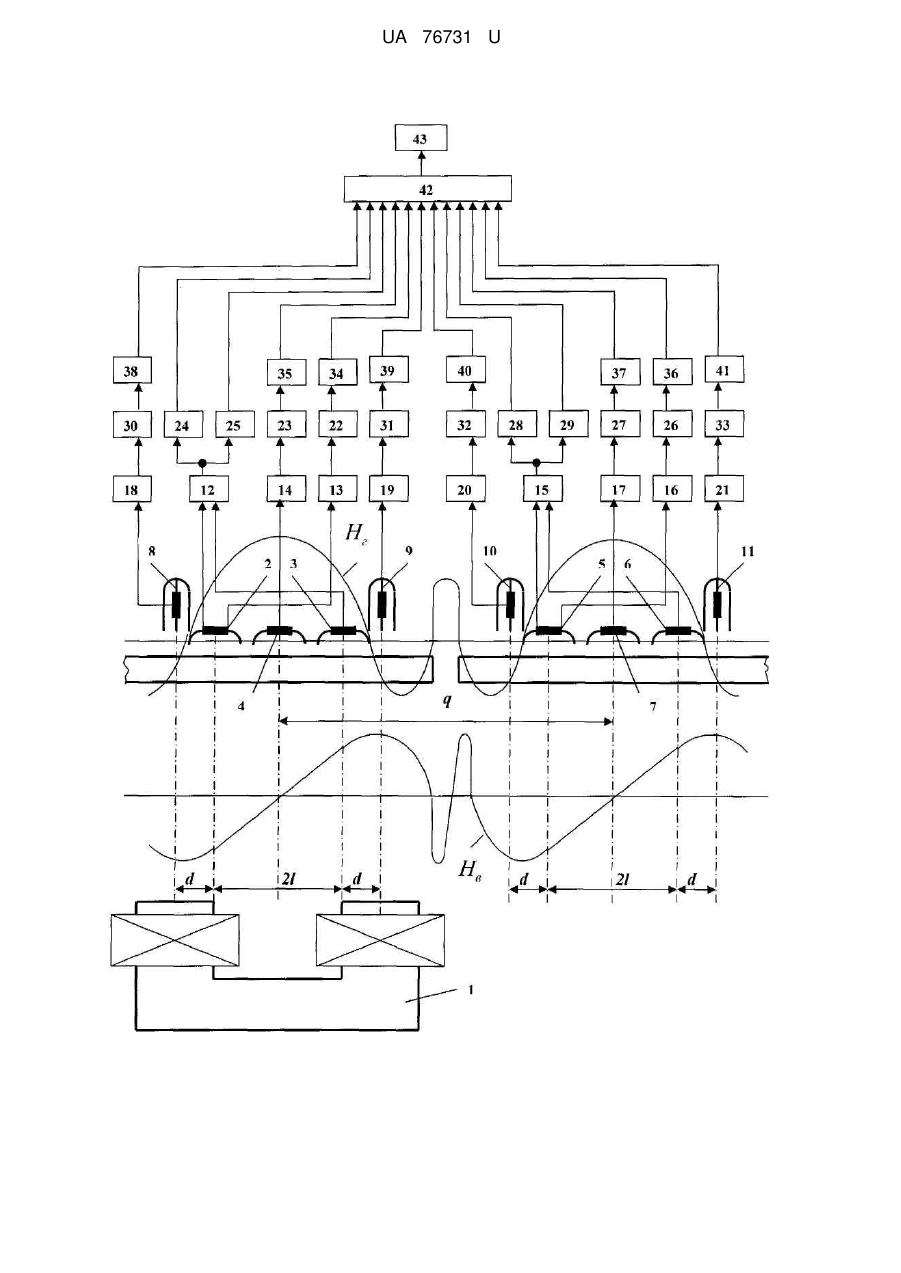
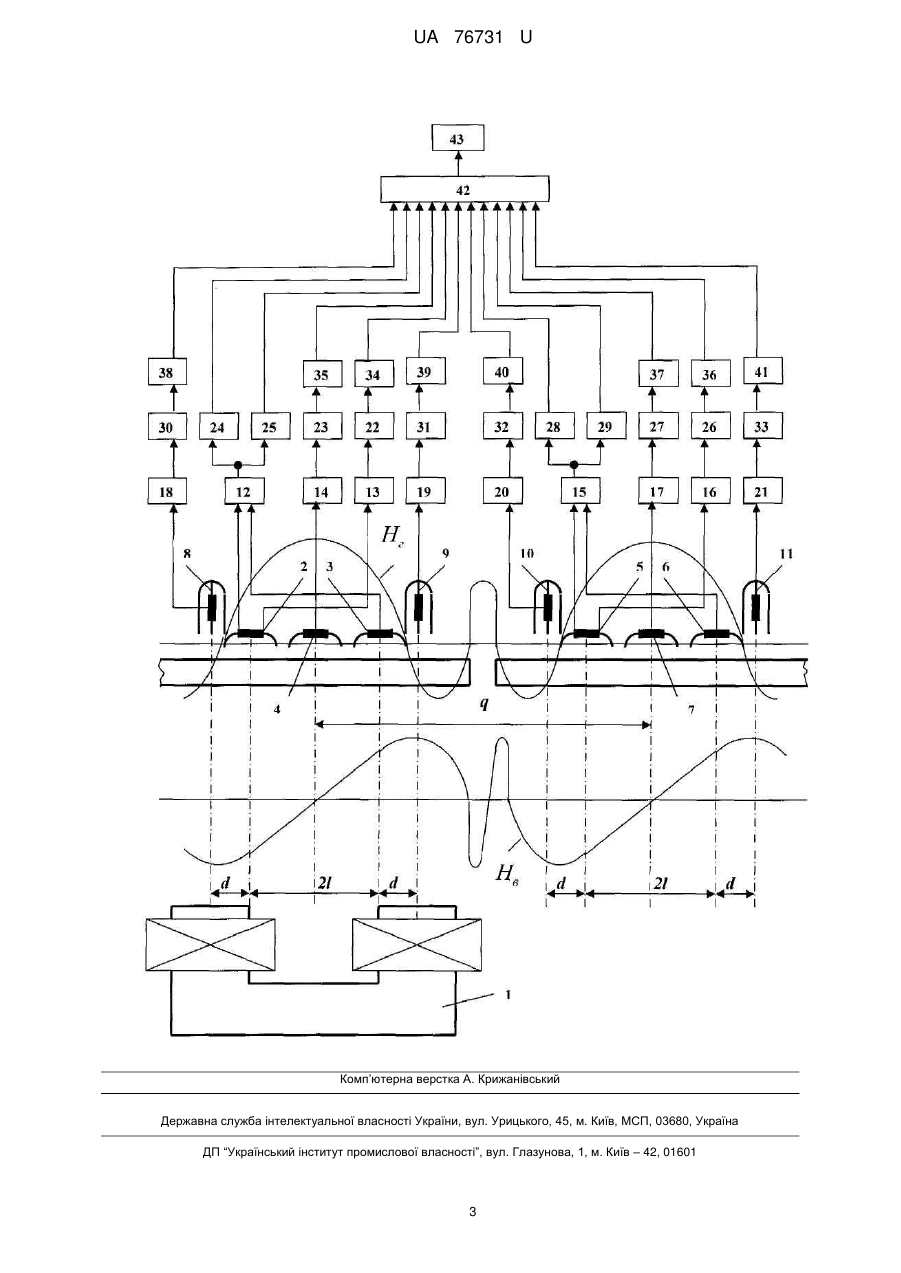
Реферат: UA 76731 U UA 76731 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до приладобудування і може бути використана у техніці магнітного запису на нестандартні магнітні носії. Відомий пристрій для визначення місцеположення рейкового рухомого об'єкта, що містить першу потокочутливу магнітну головку, підключену до першого входу першого фазового детектора, другий вхід якого з'єднаний з другою потокочутливою магнітною головкою, та сполучену через другий фазовий детектор та перший пороговий елемент з входом першого елемента НІ, третю потокочутливу магнітну головку, розташовану проти рейки між робочими зазорами першої та другої та третьої потокочутливих магнітних головок, розміщених на відстані ширини робочого зазору головки запису, та зв'язану через третій фазовий детектор та другий пороговий елемент зі входом другого елемента НІ, та елемент І, підключений до входу індикатора, до виходів першого та другого елементів НІ та до виходів третього та четвертого порогових елементів, входи яких з'єднані з виходами першого фазового детектора, четверту потокочутливу магнітну головку, підключену до першого входу четвертого фазового детектора, другий вхід якого з'єднаний з п'ятою потокочутливою магнітною головкою, та сполучену через п'ятий фазовий детектор та п'ятий пороговий елемент з входом третього елемента НІ, шосту потокочутливу магнітну головку, розташовану проти рейки між робочими зазорами четвертої та п'ятої потокочутливих магнітних головок, розміщених на відстані ширини робочого зазору головки запису, та зв'язану через шостий фазовий детектор та шостий пороговий елемент зі входом четвертого елемента НІ, при цьому елемент І підключений до виходів третього та четвертого елементів НІ та до виходів сьомого та восьмого порогових елементів, входи яких з'єднані з виходами четвертого фазового детектора, а третя та шоста потокочутливі магнітні головки розташовані одна від одної на відстані, що дорівнює розрядному інтервалу [див. авт. св. СРСР № 888148, МПК G06K 7/08, опубл. 07.12.1981, бюл. № 45]. Цей пристрій вибрано за прототип. Недолік відомого пристрою полягає в тому, що через наявну кількість однощілинних потокочутливих магнітних головок, які зчитують горизонтальні складові напруженості магнітного поля міток, пристрій має недостатню чутливість та точність роботи. В основу корисної моделі поставлено задачу вдосконалення пристрою для визначення місцеположення рейкового рухомого об'єкта шляхом того, що пристрій забезпечено додатковими сьомою, восьмою, дев'ятою та десятою двощілинними потокочутливими магнітними головками, які зчитують вертикальні складові напруженості магнітного поля міток та зміщені відповідно від першої, другої, четвертої та п'ятої потокочутливих магнітних головок на відстань, що дорівнює половині товщині полюса головки для поздовжнього запису. Це забезпечить суттєве підвищення чутливості пристрою та точності його роботи. Поставлена задача вирішується тим, що у пристрої для визначення місцеположення рейкового рухомого об'єкта, що містить першу потокочутливу магнітну головку, підключену до першого входу першого фазового детектора, другий вхід якого з'єднаний з другою потокочутливою магнітною головкою, та сполучену через другий фазовий детектор та перший пороговий елемент з входом першого елемента НІ, третю потокочутливу магнітну головку, розташовану проти рейки між робочими зазорами першої та другої та третьої потокочутливих магнітних головок, розміщених на відстані ширини робочого зазору головки запису, та зв'язану через третій фазовий детектор та другий пороговий елемент зі входом другого елемента НІ, та елемент І, підключений до входу індикатора, до виходів першого та другого елементів НІ та до виходів третього та четвертого порогових елементів, входи яких з'єднані з виходами першого фазового детектора, четверту потокочутливу магнітну головку, підключену до першого входу четвертого фазового детектора, другий вхід якого з'єднаний з п'ятою потокочутливою магнітною головкою, та сполучену через п'ятий фазовий детектор та п'ятий пороговий елемент з входом третього елемента НІ, шосту потокочутливу магнітну головку, розташовану проти рейки між робочими зазорами четвертої та п'ятої потокочутливих магнітних головок, розміщених на відстані ширини робочого зазору головки запису, та зв'язану через шостий фазовий детектор та шостий пороговий елемент зі входом четвертого елемента НІ, при цьому елемент І підключений до виходів третього та четвертого елементів НІ та до виходів сьомого та восьмого порогових елементів, входи яких з'єднані з виходами четвертого фазового детектора, а третя та шоста потокочутливі магнітні головки розташовані одна від одної на відстані, що дорівнює розрядному інтервалу, згідно з корисною моделлю, розташовано сьому, восьму, дев'яту та десяту потокочутливі магнітні головки, які зміщені відповідно від першої, другої, четвертої та п'ятої потокочутливих магнітних головок на відстань, що дорівнює половині товщині полюса головки для поздовжнього запису, при цьому сьому, восьму, дев'яту та десяту потокочутливі магнітні головки підключено через фазовий детектор та пороговий елемент до входів елемента І. 1 UA 76731 U 5 10 15 20 25 Суть корисної моделі пояснюється кресленням, де зображено пристрій для визначення місцеположення рейкового рухомого об'єкта, що містить головку для поздовжнього запису 1, першу - шосту однощілинні потокочутливі магнітні головки 2-7, які зчитують горизонтальні складові напруженості магнітного поля міток (епюра Нг), при цьому відстань між осями першої та другої 2 та 3, четвертої та п'ятої 5 та 6 потокочутливих магнітних головок дорівнює ширині 2l робочого зазору магнітної головки для поздовжнього запису 1, сьому - десяту двощілинні потокочутливі магнітні головки 8-11, які зчитують вертикальні складові напруженості магнітного поля міток (епюра Нв) та зміщені відповідно від першої, другої, четвертої та п'ятої потокочутливих магнітних головок 2, 3, 5 та 6 на відстань, що дорівнює половині товщини d полюса магнітної головки для поздовжнього запису 1, перший-десятий фазові детектори 12-21, перший-дванадцятий порогові елементи 22-33, перший-восьмий елементи НІ 34-41, елемент І 42 та індикатор 43. Потокочутливі магнітні головки 4 та 7 зміщені одна відносно одної на відстань, що дорівнює розрядному інтервалу q. Пристрій для визначення місцеположення рейкового рухомого об'єкта працює наступним чином. Попередньо на магнітний носій наносяться однополярні магнітні мітки головкою для поздовжнього запису 1 з розрядним інтервалом q. При цьому довжина міток передбачається значно більшою ніж довжина дефектів магнітного носія. При русі рейкового рухомого об'єкта, на якому розташовані потокочутливі магнітні головки 211, у момент збігу робочих зазорів потокочутливих магнітних головок 4 та 7 з центрами магнітних міток на виходах потокочутливих магнітних головок 2-11 з'являються сигнали, які перевищують пороги спрацювання порогових елементів, при цьому спрацьовують порогові елементи 13, 14, 16, 17-21, тому виходах елементів НІ 34-41 сигнали відсутні, а результативні сигнали на виході фазових детекторів 12 та 15 через компенсацію сигналів на їхніх входах дорівнюють нулю, у результаті чого спрацьовує елемент І 42, сигнал з виходу якого надходить на індикатор 43. Пропонована корисна модель забезпечить високу перешкодозахищеність від дії локальних дефектів рейок і дозволить підвищити чутливість та точність роботи пристрою. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 45 50 55 Пристрій для визначення місцеположення рейкового рухомого об'єкта, що містить першу потокочутливу магнітну головку, підключену до першого входу першого фазового детектора, другий вхід якого з'єднаний з другою потокочутливою магнітною головкою, та сполучену через другий фазовий детектор та перший пороговий елемент з входом першого елемента НІ, третю потокочутливу магнітну головку, розташовану проти рейки між робочими зазорами першої, другої та третьої потокочутливих магнітних головок, розміщених на відстані ширини робочого зазору головки запису, та зв'язану через третій фазовий детектор та другий пороговий елемент з входом другого елемента НІ, та елемент І, підключений до входу індикатора, до виходів першого та другого елементів НІ та до виходів третього та четвертого порогових елементів, входи яких з'єднані з виходами першого фазового детектора, четверту потокочутливу магнітну головку, підключену до першого входу четвертого фазового детектора, другий вхід якого з'єднаний з п'ятою потокочутливою магнітною головкою, та сполучену через п'ятий фазовий детектор та п'ятий пороговий елемент з входом третього елемента НІ, шосту потокочутливу магнітну головку, розташовану проти рейки між робочими зазорами четвертої та п'ятої потокочутливих магнітних головок, розміщених на відстані ширини робочого зазору головки запису, та зв'язану через шостий фазовий детектор та шостий пороговий елемент з входом четвертого елемента НІ, при цьому елемент І підключений до виходів третього та четвертого елементів НІ та до виходів сьомого та восьмого порогових елементів, входи яких з'єднані з виходами четвертого фазового детектора, а третя та шоста потокочутливі магнітні головки розташовані одна від одної на відстані, що дорівнює розрядному інтервалу, який відрізняється тим, що розташовано сьому, восьму, дев'яту та десяту потокочутливі магнітні головки, які зміщені відповідно від першої, другої, четвертої та п'ятої потокочутливих магнітних головок на відстань, що дорівнює половині товщини полюса головки для поздовжнього запису, при цьому сьому, восьму, дев'яту та десяту потокочутливі магнітні головки підключено через фазовий детектор та пороговий елемент до входів елемента І. 2 UA 76731 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for the detection of rail vehicle location
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюУстройство для определения местоположения рельсового подвижного объекта
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G06K 7/08
Мітки: об'єкта, пристрій, місцеположення, визначення, рейкового, рухомого
Код посилання
<a href="https://ua.patents.su/5-76731-pristrijj-dlya-viznachennya-miscepolozhennya-rejjkovogo-rukhomogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення місцеположення рейкового рухомого об’єкта</a>
Пристрій для визначення місцеположення рейкового рухомого об’єкта
Номер патенту: 75781
Опубліковано: 10.12.2012
Автор: Смірний Михайло Федорович
МПК: G06K 7/08
Мітки: визначення, об'єкта, пристрій, рухомого, рейкового, місцеположення
Формула / Реферат:
Пристрій для визначення місцеположення рейкового рухомого об'єкта, що містить першу потокочутливу магнітну головку, підключену до першого входу першого фазового детектора, другий вхід якого з'єднаний з другою потокочутливою магнітною головкою, та сполучену через другий фазовий детектор та перший пороговий елемент з входом першого елемента НІ, третю потокочутливу магнітну головку, розташовану проти рейки між робочими зазорами першої та другої...
Пристрій для визначення місцеположення рейкового рухомого об’єкта
Номер патенту: 74914
Опубліковано: 12.11.2012
Автор: Смірний Михайло Федорович
МПК: G06K 7/08
Мітки: рухомого, пристрій, визначення, рейкового, місцеположення, об'єкта
Формула / Реферат:
Пристрій для визначення місцеположення рейкового рухомого об'єкта, що містить першу потокочутливу магнітну головку, підключену до першого входу першого фазового детектора, другий вхід якого з'єднаний з другою потокочутливою магнітною головкою, та сполучену через другий фазовий детектор та перший пороговий елемент з входом першого елемента НІ, третю потокочутливу магнітну головку, розташовану проти рейки між робочими зазорами першої та другої...
Пристрій для визначення місцеположення рейкового транспорту

Номер патенту: 64153
Опубліковано: 25.10.2011
Автор: Смірний Михайло Федорович
МПК: G06K 7/08
Мітки: пристрій, транспорту, визначення, рейкового, місцеположення
Формула / Реферат:
Пристрій для визначення місцеположення рейкового транспорту, що містить перший, другий та третій фазові детектори, входи яких з'єднані з виводами відповідно першої, другої та третьої потокочутливих магнітних головок, розташованих вздовж рейки, причому відстань між крайніми головками дорівнює ширині робочого зазору головки запису, а перша головка розміщена в центрі цього зазору, перший та другий порогові елементи, які підключені до виходів...
Пристрій для визначення місцеположення рейкового транспорту
Номер патенту: 64143
Опубліковано: 25.10.2011
Автор: Смірний Михайло Федорович
МПК: G06K 7/08
Мітки: визначення, пристрій, рейкового, транспорту, місцеположення
Формула / Реферат:
Пристрій для визначення місцеположення рейкового транспорту, що містить перший, другий та третій фазові детектори, входи яких з'єднані з виводами відповідно першої, другої та третьої потокочутливих магнітних головок, розташованих вздовж рейки, причому відстань між крайніми головками дорівнює ширині робочого зазору головки запису, а перша головка розміщена в центрі цього зазору, перший та другий порогові елементи, які підключені до виходів...
Пристрій для визначення місцеположення рейкового транспорту
Номер патенту: 75784
Опубліковано: 10.12.2012
Автор: Смірний Михайло Федорович
МПК: G06K 7/08
Мітки: транспорту, пристрій, рейкового, визначення, місцеположення
Формула / Реферат:
Пристрій для визначення місцеположення рейкового транспорту, що містить перший, другий та третій фазові детектори, входи яких з'єднані з виводами відповідно першої, другої та третьої потокочутливих магнітних головок, розташованих вздовж рейки, причому відстань між крайніми головками дорівнює ширині робочого зазору головки запису, а перша головка розміщена в центрі цього зазору, перший та другий порогові елементи, що підключені до виходів...
Попередній патент: Індуктивний перетворювач з диференціальним повітряним зазором
Наступний патент: Креветковий ятір
Випадковий патент: Спосіб інтенсифікації припливу флюїду у свердловину