Імітатор руху техніки
Номер патенту: 76997
Опубліковано: 25.01.2013
Автори: Гераськін Володимир Миколайович, Гераськін Дмитро Володимирович, Божок Аркадій Михайлович

Формула / Реферат
Імітатор руху техніки, що містить складаний ящик з рамою, електропривод з вихідним вертикальним валом, розміщеним усередині ящика на рамі, хрестовину, закріплену на верхній частині вала, і симетрично установленими на ній штангами з кутиковими відбивачами на периферії, який відрізняється тим, що в ньому привод виконаний пневматичним у вигляді акумулятора стисненого повітря з покажчиком тиску, а вертикальний вал - порожнистим, нижня частина якого жорстко зв'язана з акумулятором стисненого повітря і через упорний підшипник - з рамою ящика з можливістю обертатися навколо осі, на верхній частині вала на хрестовині додатково установлений виконавчий механізм дистанційного керування з автоматичним клапаном і краном ручного настроювання тиску вихідного повітря і штанги виконані порожнистими, з якими з одного боку сполучається порожнина вала, а з другого боку, - додатково установлені біля відбивачів, регулювальні крани і сопла, а також в акумуляторі стисненого повітря додатково установлений пневматичний регулятор, виконаний у вигляді підпружиненої діафрагми, периферійна частина якої защемлена кришкою до корпуса з утворенням з ним двох, розділених нею, камер, першої напірної, сполученої з порожниною вертикального вала, і другої компенсаційної - з атмосферою, а основа діафрагми через регулювальний гвинт зв'язана з одним кінцем пружини, протилежний кінець якої - з корпусом.
Текст
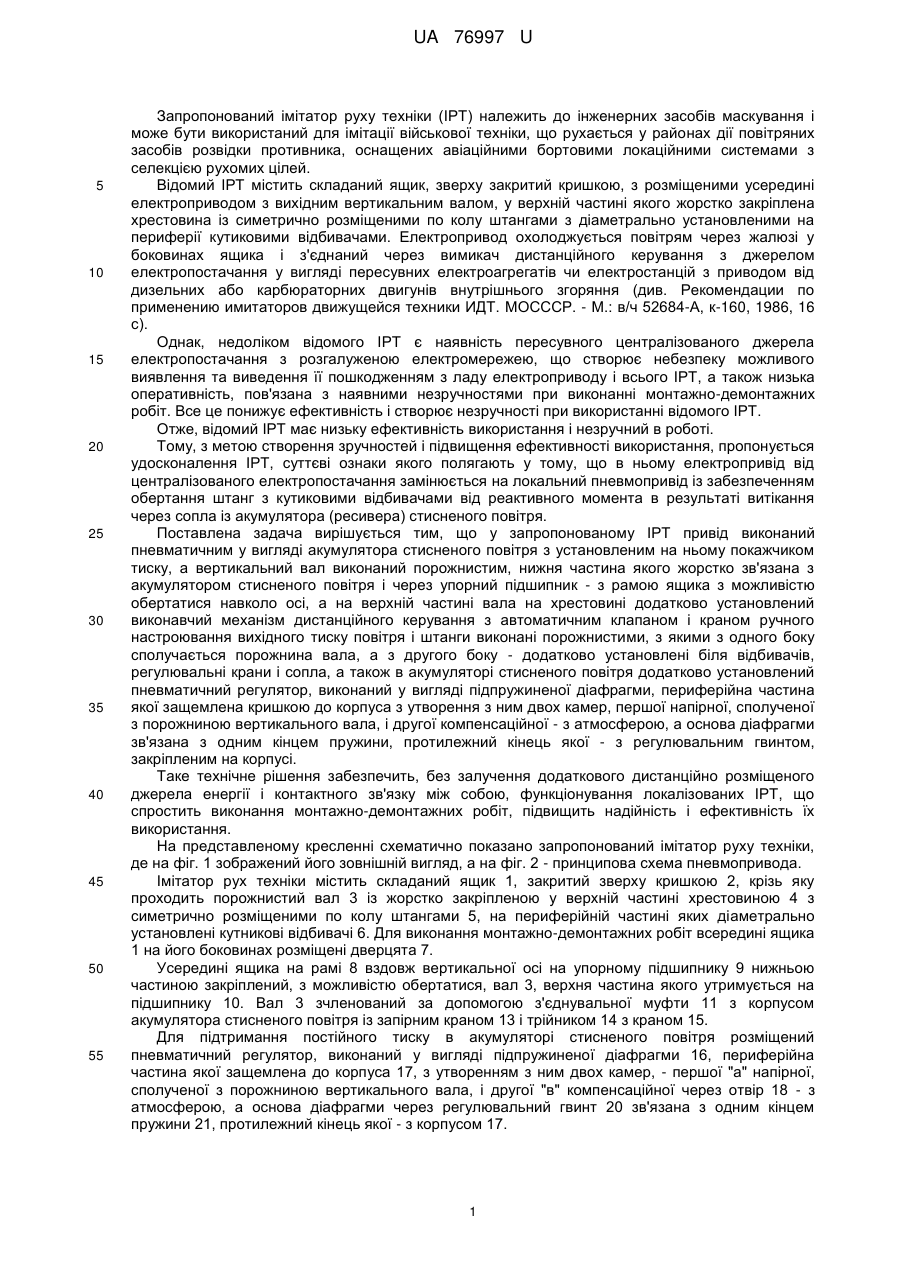
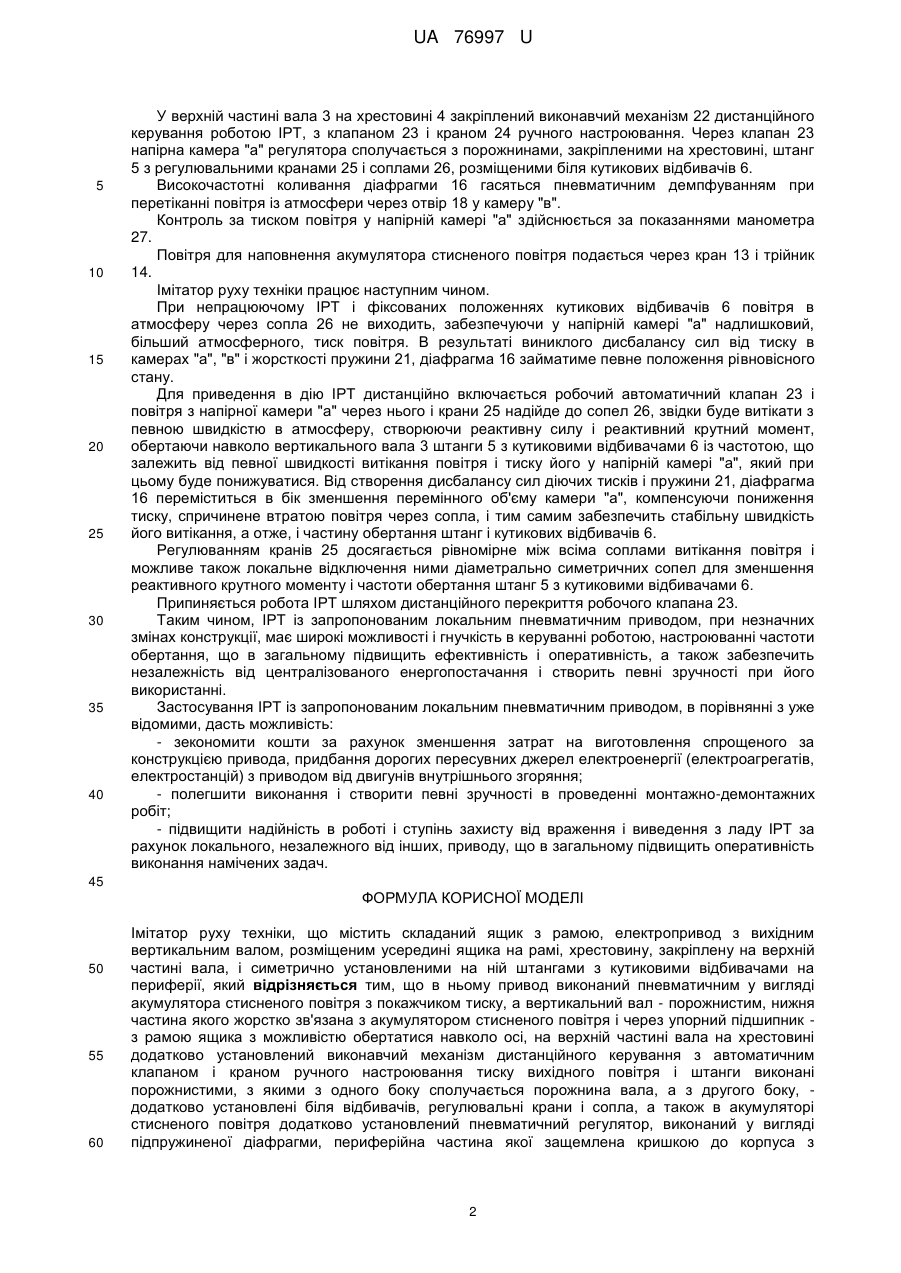
Реферат: Імітатор руху техніки містить складаний ящик з рамою, електропривод з вихідним вертикальним валом, розміщеним усередині ящика на рамі, хрестовину, закріплену на верхній частині вала, і симетрично установленими на ній штангами з кутиковими відбивачами на периферії. Привод виконаний пневматичним у вигляді акумулятора стисненого повітря з покажчиком тиску, а вертикальний вал - порожнистим, нижня частина якого жорстко зв'язана з акумулятором стисненого повітря і через упорний підшипник - з рамою ящика з можливістю обертатися навколо осі. На верхній частині вала на хрестовині додатково установлений виконавчий механізм дистанційного керування з автоматичним клапаном і краном ручного настроювання тиску вихідного повітря і штанги виконані порожнистими, з якими з одного боку сполучається порожнина вала, а з другого боку, - додатково установлені біля відбивачів, регулювальні крани і сопла. UA 76997 U (12) UA 76997 U UA 76997 U 5 10 15 20 25 30 35 40 45 50 55 Запропонований імітатор руху техніки (ІРТ) належить до інженерних засобів маскування і може бути використаний для імітації військової техніки, що рухається у районах дії повітряних засобів розвідки противника, оснащених авіаційними бортовими локаційними системами з селекцією рухомих цілей. Відомий ІРТ містить складаний ящик, зверху закритий кришкою, з розміщеними усередині електроприводом з вихідним вертикальним валом, у верхній частині якого жорстко закріплена хрестовина із симетрично розміщеними по колу штангами з діаметрально установленими на периферії кутиковими відбивачами. Електропривод охолоджується повітрям через жалюзі у боковинах ящика і з'єднаний через вимикач дистанційного керування з джерелом електропостачання у вигляді пересувних електроагрегатів чи електростанцій з приводом від дизельних або карбюраторних двигунів внутрішнього згоряння (див. Рекомендации по применению имитаторов движущейся техники ИДТ. МОСССР. - М.: в/ч 52684-А, к-160, 1986, 16 с). Однак, недоліком відомого ІРТ є наявність пересувного централізованого джерела електропостачання з розгалуженою електромережею, що створює небезпеку можливого виявлення та виведення її пошкодженням з ладу електроприводу і всього ІРТ, а також низька оперативність, пов'язана з наявними незручностями при виконанні монтажно-демонтажних робіт. Все це понижує ефективність і створює незручності при використанні відомого ІРТ. Отже, відомий ІРТ має низьку ефективність використання і незручний в роботі. Тому, з метою створення зручностей і підвищення ефективності використання, пропонується удосконалення ІРТ, суттєві ознаки якого полягають у тому, що в ньому електропривід від централізованого електропостачання замінюється на локальний пневмопривід із забезпеченням обертання штанг з кутиковими відбивачами від реактивного момента в результаті витікання через сопла із акумулятора (ресивера) стисненого повітря. Поставлена задача вирішується тим, що у запропонованому ІРТ привід виконаний пневматичним у вигляді акумулятора стисненого повітря з установленим на ньому покажчиком тиску, а вертикальний вал виконаний порожнистим, нижня частина якого жорстко зв'язана з акумулятором стисненого повітря і через упорний підшипник - з рамою ящика з можливістю обертатися навколо осі, а на верхній частині вала на хрестовині додатково установлений виконавчий механізм дистанційного керування з автоматичним клапаном і краном ручного настроювання вихідного тиску повітря і штанги виконані порожнистими, з якими з одного боку сполучається порожнина вала, а з другого боку - додатково установлені біля відбивачів, регулювальні крани і сопла, а також в акумуляторі стисненого повітря додатково установлений пневматичний регулятор, виконаний у вигляді підпружиненої діафрагми, периферійна частина якої защемлена кришкою до корпуса з утворення з ним двох камер, першої напірної, сполученої з порожниною вертикального вала, і другої компенсаційної - з атмосферою, а основа діафрагми зв'язана з одним кінцем пружини, протилежний кінець якої - з регулювальним гвинтом, закріпленим на корпусі. Таке технічне рішення забезпечить, без залучення додаткового дистанційно розміщеного джерела енергії і контактного зв'язку між собою, функціонування локалізованих ІРТ, що спростить виконання монтажно-демонтажних робіт, підвищить надійність і ефективність їх використання. На представленому кресленні схематично показано запропонований імітатор руху техніки, де на фіг. 1 зображений його зовнішній вигляд, а на фіг. 2 -принципова схема пневмопривода. Імітатор рух техніки містить складаний ящик 1, закритий зверху кришкою 2, крізь яку проходить порожнистий вал 3 із жорстко закріпленою у верхній частині хрестовиною 4 з симетрично розміщеними по колу штангами 5, на периферійній частині яких діаметрально установлені кутникові відбивачі 6. Для виконання монтажно-демонтажних робіт всередині ящика 1 на його боковинах розміщені дверцята 7. Усередині ящика на рамі 8 вздовж вертикальної осі на упорному підшипнику 9 нижньою частиною закріплений, з можливістю обертатися, вал 3, верхня частина якого утримується на підшипнику 10. Вал 3 зчленований за допомогою з'єднувальної муфти 11 з корпусом акумулятора стисненого повітря із запірним краном 13 і трійником 14 з краном 15. Для підтримання постійного тиску в акумуляторі стисненого повітря розміщений пневматичний регулятор, виконаний у вигляді підпружиненої діафрагми 16, периферійна частина якої защемлена до корпуса 17, з утворенням з ним двох камер, - першої "а" напірної, сполученої з порожниною вертикального вала, і другої "в" компенсаційної через отвір 18 - з атмосферою, а основа діафрагми через регулювальний гвинт 20 зв'язана з одним кінцем пружини 21, протилежний кінець якої - з корпусом 17. 1 UA 76997 U 5 10 15 20 25 30 35 40 У верхній частині вала 3 на хрестовині 4 закріплений виконавчий механізм 22 дистанційного керування роботою ІРТ, з клапаном 23 і краном 24 ручного настроювання. Через клапан 23 напірна камера "а" регулятора сполучається з порожнинами, закріпленими на хрестовині, штанг 5 з регулювальними кранами 25 і соплами 26, розміщеними біля кутикових відбивачів 6. Високочастотні коливання діафрагми 16 гасяться пневматичним демпфуванням при перетіканні повітря із атмосфери через отвір 18 у камеру "в". Контроль за тиском повітря у напірній камері "а" здійснюється за показаннями манометра 27. Повітря для наповнення акумулятора стисненого повітря подається через кран 13 і трійник 14. Імітатор руху техніки працює наступним чином. При непрацюючому ІРТ і фіксованих положеннях кутикових відбивачів 6 повітря в атмосферу через сопла 26 не виходить, забезпечуючи у напірній камері "а" надлишковий, більший атмосферного, тиск повітря. В результаті виниклого дисбалансу сил від тиску в камерах "а", "в" і жорсткості пружини 21, діафрагма 16 займатиме певне положення рівновісного стану. Для приведення в дію ІРТ дистанційно включається робочий автоматичний клапан 23 і повітря з напірної камери "а" через нього і крани 25 надійде до сопел 26, звідки буде витікати з певною швидкістю в атмосферу, створюючи реактивну силу і реактивний крутний момент, обертаючи навколо вертикального вала 3 штанги 5 з кутиковими відбивачами 6 із частотою, що залежить від певної швидкості витікання повітря і тиску його у напірній камері "а", який при цьому буде понижуватися. Від створення дисбалансу сил діючих тисків і пружини 21, діафрагма 16 переміститься в бік зменшення перемінного об'єму камери "а", компенсуючи пониження тиску, спричинене втратою повітря через сопла, і тим самим забезпечить стабільну швидкість його витікання, а отже, і частину обертання штанг і кутикових відбивачів 6. Регулюванням кранів 25 досягається рівномірне між всіма соплами витікання повітря і можливе також локальне відключення ними діаметрально симетричних сопел для зменшення реактивного крутного моменту і частоти обертання штанг 5 з кутиковими відбивачами 6. Припиняється робота ІРТ шляхом дистанційного перекриття робочого клапана 23. Таким чином, ІРТ із запропонованим локальним пневматичним приводом, при незначних змінах конструкції, має широкі можливості і гнучкість в керуванні роботою, настроюванні частоти обертання, що в загальному підвищить ефективність і оперативність, а також забезпечить незалежність від централізованого енергопостачання і створить певні зручності при його використанні. Застосування ІРТ із запропонованим локальним пневматичним приводом, в порівнянні з уже відомими, дасть можливість: - зекономити кошти за рахунок зменшення затрат на виготовлення спрощеного за конструкцією привода, придбання дорогих пересувних джерел електроенергії (електроагрегатів, електростанцій) з приводом від двигунів внутрішнього згоряння; - полегшити виконання і створити певні зручності в проведенні монтажно-демонтажних робіт; - підвищити надійність в роботі і ступінь захисту від враження і виведення з ладу ІРТ за рахунок локального, незалежного від інших, приводу, що в загальному підвищить оперативність виконання намічених задач. 45 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 60 Імітатор руху техніки, що містить складаний ящик з рамою, електропривод з вихідним вертикальним валом, розміщеним усередині ящика на рамі, хрестовину, закріплену на верхній частині вала, і симетрично установленими на ній штангами з кутиковими відбивачами на периферії, який відрізняється тим, що в ньому привод виконаний пневматичним у вигляді акумулятора стисненого повітря з покажчиком тиску, а вертикальний вал - порожнистим, нижня частина якого жорстко зв'язана з акумулятором стисненого повітря і через упорний підшипник з рамою ящика з можливістю обертатися навколо осі, на верхній частині вала на хрестовині додатково установлений виконавчий механізм дистанційного керування з автоматичним клапаном і краном ручного настроювання тиску вихідного повітря і штанги виконані порожнистими, з якими з одного боку сполучається порожнина вала, а з другого боку, додатково установлені біля відбивачів, регулювальні крани і сопла, а також в акумуляторі стисненого повітря додатково установлений пневматичний регулятор, виконаний у вигляді підпружиненої діафрагми, периферійна частина якої защемлена кришкою до корпуса з 2 UA 76997 U утворенням з ним двох, розділених нею, камер, першої напірної, сполученої з порожниною вертикального вала, і другої компенсаційної - з атмосферою, а основа діафрагми через регулювальний гвинт зв'язана з одним кінцем пружини, протилежний кінець якої - з корпусом. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюSimulator of machinery motion
Автори англійськоюBozhok Arkadii Mykhailovych, Heras'kin Volodymyr Mykolaiovych, Heras'kin Dmytro Volodymyrovych
Назва патенту російськоюИмитатор движения техники
Автори російськоюБожок Аркадий Михайлович, Гераськин Владимир Николаевич, Гераськин Дмитрий Владимирович
МПК / Мітки
МПК: F41J 1/00
Мітки: руху, імітатор, техніки
Код посилання
<a href="https://ua.patents.su/5-76997-imitator-rukhu-tekhniki.html" target="_blank" rel="follow" title="База патентів України">Імітатор руху техніки</a>
Імітатор руху техніки а.м. божка – в.м. гераськіна
Номер патенту: 15207
Опубліковано: 15.06.2006
Автори: Гераськін Володимир Миколайович, Божок Аркадій Михайлович
МПК: F41J 1/00
Мітки: руху, імітатор, гераськіна, техніки, божка, а.м, в.м
Формула / Реферат:
Імітатор руху техніки, що містить складаний ящик з рамою, електропривід з вихідним вертикальним валом, розміщеним усередині ящика на рамі, хрестовину, закріплену на верхній частині вала із симетрично установленими на ній штангами з кутниковими відбивачами на периферії, який відрізняється тим, що у ньому привід виконаний пневматичним у вигляді акумулятора стисненого повітря з покажчиком тиску, а вертикальний вал виконаний порожнистим, нижня...
Контактний пристрій для з’єднання кабелів техніки зв’язку та обчислювальної техніки
Номер патенту: 25891
Опубліковано: 26.02.1999
Автори: Дітер Герке, Харольд БЮЛОВ, Манфред Мюллер
МПК: H04R 9/00
Мітки: обчислювальної, з'єднання, кабелів, пристрій, зв'язку, контактний, техніки
Формула / Реферат:
1. Контактное устройство для соединения кабелей техники связи и вычислительной техники, содержащее узел для подключения одного из соединяемых кабелей, выполненный в виде основания и размещенных в нем в ряд режуще-зажимных контактных элементов для электрического соединения, с подводимыми жилами указанного выше подключаемого кабеля с ножевыми контактными элементами в виде пластинок, и разводной узел для подключения другого из соединяемых...
Імітатор мікроклімату соляних печер
Номер патенту: 82279
Опубліковано: 25.03.2008
Автори: Дем'яненко Василь Васильович, Мандзюк Ростислав Любомирович, Мандзюк Любомир Михайлович
МПК: H01J 37/32, A61N 1/44, A61G 10/02
Мітки: мікроклімату, печер, імітатор, соляних
Формула / Реферат:
Імітатор мікроклімату соляних печер, що складається з генератора іонів у вигляді індуктора низькотемпературної плазми, розміщеного в газонаповненій кварцовій колбі, яка розміщена в іонізаційній камері, а іонізаційна камера сполучена за допомогою магістрального шланга з джерелом стисненого газу, який відрізняється тим, що принаймні одна із стінок іонізаційної камери виконана із перфорованої мінеральної пластинки, до хімічного складу якої...
Імітатор повітряних цілей
Номер патенту: 73143
Опубліковано: 10.09.2012
Автор: Голуб Валентин Антонович
МПК: F41H 3/00
Мітки: імітатор, повітряних, цілей
Формула / Реферат:
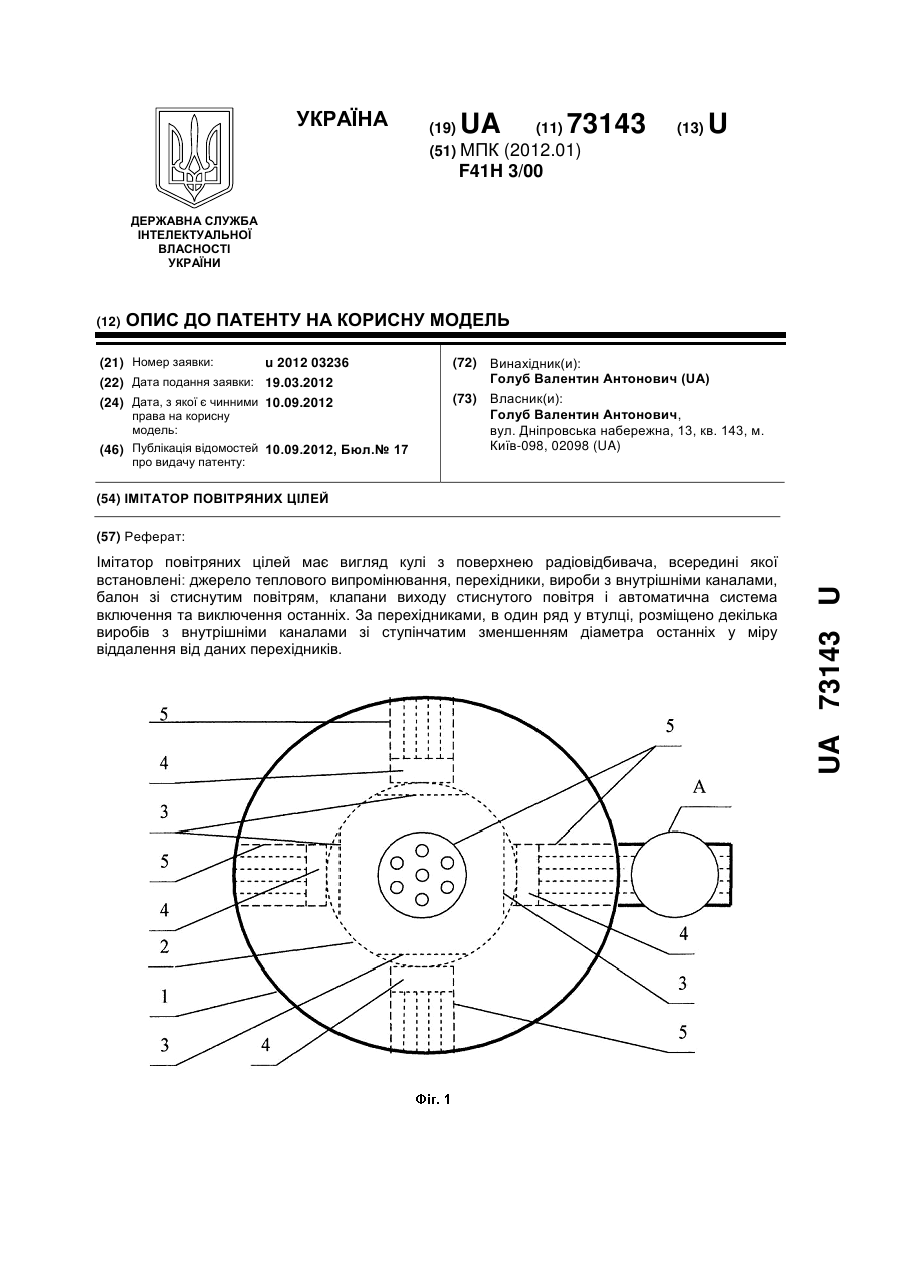
Імітатор повітряних цілей, що має вигляд кулі з поверхнею радіовідбивача, всередині якої встановлені джерело теплового випромінювання, перехідники, вироби з внутрішніми каналами, балон зі стиснутим повітрям, клапани виходу стиснутого повітря і автоматична система включення та виключення останніх, який відрізняється тим, що за перехідниками, в один ряд у втулці, розміщено декілька виробів з внутрішніми каналами зі ступінчатим зменшенням...
Стенд для дослідження руху зрідженої маси комбікорму
Номер патенту: 45795
Опубліковано: 25.11.2009
Автори: Городняк Роман Васильович, Дмитрів Василь Тарасович
МПК: G01N 11/00, A23N 17/00
Мітки: руху, комбікорму, зрідженої, дослідження, маси, стенд
Формула / Реферат:
1. Стенд для дослідження руху зрідженої маси комбікорму, що містить диференціальний манометр, сітки, який відрізняється тим, що містить корпус, електричний двигун, привідний вал, вакуумметр, манометр, вертикально розміщені бункери з основним компонентом і компонентом, що вводиться, у вигляді конусів з отворами у нижній частині, при цьому у верхній частині стенда на бункері з компонентом, що вводиться, розміщений дозатор основного компонента,...
Попередній патент: Спосіб діагностування внутрішньої герметичності агрегатів об’ємного гідроприводу трансмісій
Наступний патент: Спосіб побудови температурної шкали
Випадковий патент: Фільтр для горизонтальних свердловин