Спосіб автоматичного вирівнювання подовжньої осі літального апарата відносно осі злітно-посадкової смуги

Формула / Реферат
Спосіб автоматичного вирівнювання подовжньої осі літального апарата відносно осі злітно-посадкової смуги (ЗПС), що включає випромінювання і прийом безперервних високочастотних коливань, який відрізняється тим, що спочатку в двох незалежних каналах генерують безперервні високочастотні коливання з двома різними, мало відмінними одна від одної частотами ![]() і
і ![]() , причому ці коливання через циркулятори подають на дві незалежні антени первинного випромінювання і вторинного прийому, які розташовують на площинах крил літального апарата, і первинно випромінюють у напрямі ЗПС, при цьому в площині ЗПС на її осі на деякій відстані одна від одної розташовують як мінімум дві антени первинного прийому і вторинного випромінювання для кожною ретранслятора окремо (антени ретрансляторів), при цьому безперервні високочастотні коливання з частотами
, причому ці коливання через циркулятори подають на дві незалежні антени первинного випромінювання і вторинного прийому, які розташовують на площинах крил літального апарата, і первинно випромінюють у напрямі ЗПС, при цьому в площині ЗПС на її осі на деякій відстані одна від одної розташовують як мінімум дві антени первинного прийому і вторинного випромінювання для кожною ретранслятора окремо (антени ретрансляторів), при цьому безперервні високочастотні коливання з частотами ![]() і
і ![]() антенами кожного ретранслятора первинно приймають і подають на керовані фазообертачі відбивного типу для кожного ретранслятора окремо, фазовий зсув яких регулюють генераторами низької частоти з частотами
антенами кожного ретранслятора первинно приймають і подають на керовані фазообертачі відбивного типу для кожного ретранслятора окремо, фазовий зсув яких регулюють генераторами низької частоти з частотами ![]() ,
, ![]() ,
, ![]() і т. д. для кожного ретранслятора окремо, при цьому в первинно прийняті високочастотні коливання в кожному ретрансляторі вводять монотонно наростаючий фазовий зсув, при цьому трансформовані по частоті безперервні високочастотні коливання антенами ретрансляторів повторно випромінюють у напрямі антен первинного випромінювання і вторинного прийому, які розташовують на площинах крил літального апарата, що рознесені в просторі, причому першим ретранслятором повторно випромінюють коливання з частотами
і т. д. для кожного ретранслятора окремо, при цьому в первинно прийняті високочастотні коливання в кожному ретрансляторі вводять монотонно наростаючий фазовий зсув, при цьому трансформовані по частоті безперервні високочастотні коливання антенами ретрансляторів повторно випромінюють у напрямі антен первинного випромінювання і вторинного прийому, які розташовують на площинах крил літального апарата, що рознесені в просторі, причому першим ретранслятором повторно випромінюють коливання з частотами ![]() і
і ![]() , другим ретранслятором повторно випромінюють коливання з частотами
, другим ретранслятором повторно випромінюють коливання з частотами ![]() і
і ![]() , третім ретранслятором повторно випромінюють коливання з частотами
, третім ретранслятором повторно випромінюють коливання з частотами ![]() і
і ![]() і т.п., при цьому випромінювані ретрансляторами коливання антенами первинного випромінювання і вторинного прийому літального апарата приймають і через два циркулятори подають на два змішувачі в кожному каналі окремо, при цьому в змішувачах прийняті коливання змішують з початковими безперервними високочастотними коливаннями і виділяють комбінаційні низькочастотні складові різниці початкових і трансформованих по частоті високочастотних коливань, при цьому в тому каналі, де генерують високочастотні коливання з частотою
і т.п., при цьому випромінювані ретрансляторами коливання антенами первинного випромінювання і вторинного прийому літального апарата приймають і через два циркулятори подають на два змішувачі в кожному каналі окремо, при цьому в змішувачах прийняті коливання змішують з початковими безперервними високочастотними коливаннями і виділяють комбінаційні низькочастотні складові різниці початкових і трансформованих по частоті високочастотних коливань, при цьому в тому каналі, де генерують високочастотні коливання з частотою ![]() , виділяють комбінаційні низькочастотні складові з частотами
, виділяють комбінаційні низькочастотні складові з частотами ![]() ,
, ![]() ,
, ![]() ,
, ![]() , а в тому каналі, де генерують високочастотні коливання з частотою
, а в тому каналі, де генерують високочастотні коливання з частотою ![]() , виділяють комбінаційні низькочастотні складові з частотами
, виділяють комбінаційні низькочастотні складові з частотами ![]() ,
, ![]() ,
, ![]() ,
, ![]() , при цьому виділені низькочастотні коливання з однаковими частотами попарно подають на фазометри, число яких вибирають рівним числу виділених низькочастотних коливань, при цьому на виході цих фазометрів виділяють сигнали, пропорційні різниці фаз між цими парами комбінаційних низькочастотних складових, які подають в систему автоматичного керування рухом літального апарата, при цьому, керуючи положенням літального апарата, підтримують сигнали на виході всіх фазометрів на нульовому рівні, забезпечуючи тим самим автоматичне поєднання подовжньої осі літального апарата з віссю ЗПС.
, при цьому виділені низькочастотні коливання з однаковими частотами попарно подають на фазометри, число яких вибирають рівним числу виділених низькочастотних коливань, при цьому на виході цих фазометрів виділяють сигнали, пропорційні різниці фаз між цими парами комбінаційних низькочастотних складових, які подають в систему автоматичного керування рухом літального апарата, при цьому, керуючи положенням літального апарата, підтримують сигнали на виході всіх фазометрів на нульовому рівні, забезпечуючи тим самим автоматичне поєднання подовжньої осі літального апарата з віссю ЗПС.
Текст
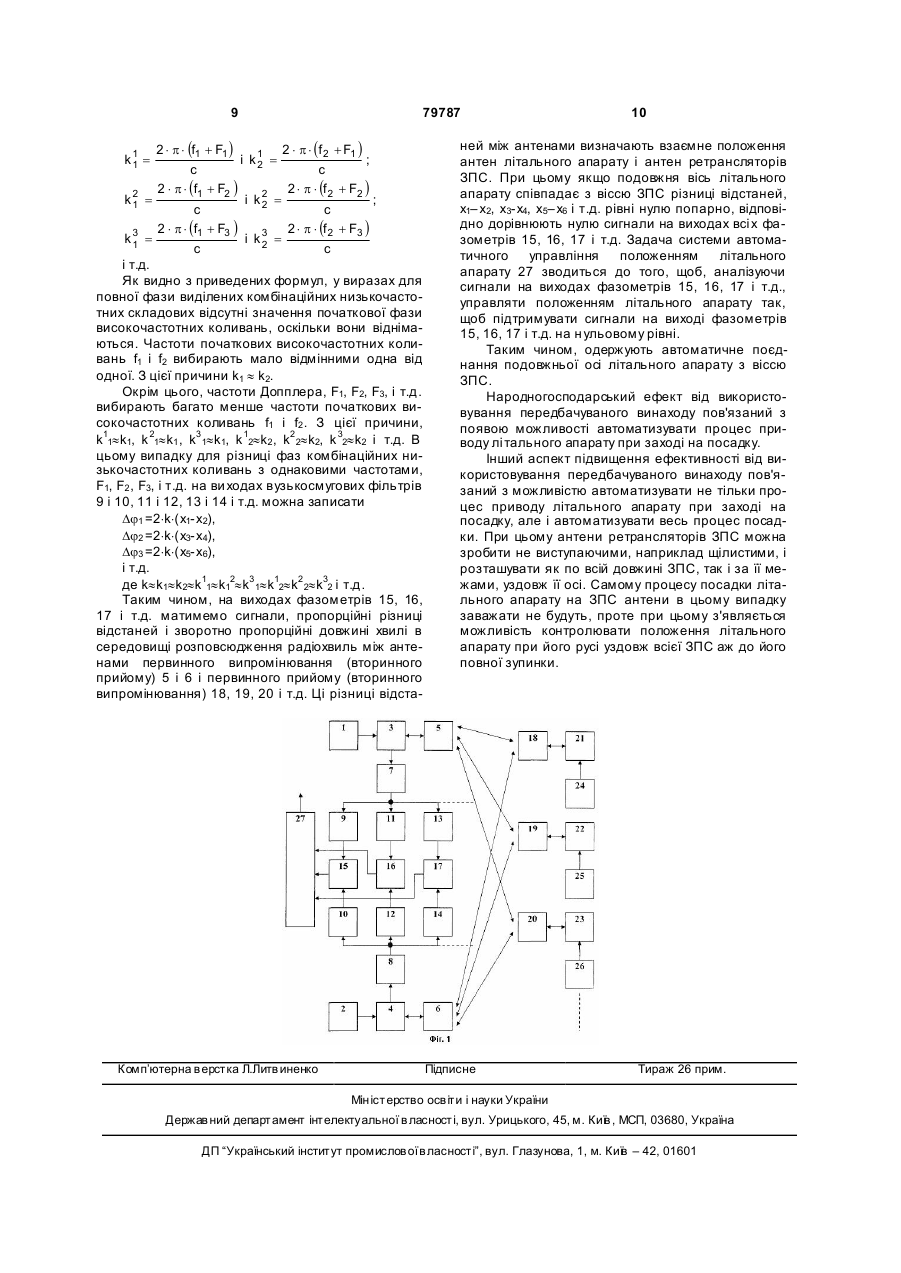
Спосіб автоматичного вирівнювання подовжньої осі літального апарата відносно осі злітнопосадкової смуги (ЗПС), що включає випромінювання і прийом безперервних високочастотних коливань, який відрізняється тим, що спочатку в двох незалежних каналах генерують безперервні високочастотні коливання з двома різними, мало відмінними одна від одної частотами f1 і f 2 , причому ці коливання через циркулятори подають на дві незалежні антени первинного випромінювання і вторинного прийому, які розташовують на площинах крил літального апарата, і первинно випромінюють у напрямі ЗПС, при цьому в площині ЗПС на її осі на деякій відстані одна від одної розташовують як мінімум дві антени первинного прийому і вторинного випромінювання для кожною ретранслятора окремо (антени ретрансляторів), при цьому безперервні високочастотні коливання з частотами f1 і f 2 антенами кожного ретранслятора первинно приймають і подають на керовані фазообертачі відбивного типу для кожного ретранслятора окремо, фазовий зсув яких регулюють генераторами низької частоти з частотами F1 , F2 , F3 і т. д. для кожного ретранслятора окремо, при цьому в первинно прийняті високочастотні коливання в кожному ретрансляторі вводять монотонно наростаючий фазовий зсув, при цьому трансформовані по 2 (19) 1 3 79787 4 керуючи положенням літального апарата, підтримують сигнали на виході всіх фазометрів на нульовому рівні, забезпечуючи тим самим автомати чне поєднання подовжньої осі літального апарата з віссю ЗПС. Винахід відноситься до області радіотехніки і може бути використаний при організації автоматичного приводу і посадки літального апарату на злітно-посадочну смугу (ЗПС). Відомі способи приводу літальних апаратів, засновані на випромінюванні привідних маяків. Проте позиціювання літальних апаратів при цьому здійснюється амплітудними методами і на достатньо великих відстанях. Точність позиціювання при цьому виявляється невисокою. Найближчим до передбачуваного винаходу відноситься Спосіб визначення кута приходу радіохвиль, заснований на вимірюванні різниці фаз між сигналами в двох рознесених точках простору, описаний в [А.С. №1718149 (СРСР) і опублікований в БВ №9, 07.03.1992 G01R29/08]. За цим способом визначення кута приходу радіохвиль спочатку в двох незалежних каналах генерують безперервні високочастотні коливання з двома різними, мало відмінними одна від одної частотами f1 i f2. Ці коливання через циркулятори подають на дві незалежні антени первинного випромінювання і вторинного прийому і первинно випромінюють у напрямі третьої антени первинного прийому і вторинного випромінювання, де обидва ці безперервні високочастотні коливання первинно приймають і подають на керований фазообертач відбивного типа, фазовий зсув якого регулюють генератором низької частоти. При цьому в первинно прийняті високочастотні коливання вводять монотонно зростаючий фазовий зсув. Трансформовані таким чином по частоті безперервні високочастотні коливання з частотами f/1=f1+F i f/2 =f2+F повторно випромінюють у напрямі антен первинного випромінювання і вторинного прийому, що рознесені в просторі, де обидва ці повторно випромінених коливання антенами первинного випромінювання і вторинного прийому повторно приймають і через два циркулятора подають на два змішувачі в кожному каналі окремо, при цьому в змішувачах прийняті коливання змішують з початковими безперервними високочастотними коливаннями і виділяють комбінаційні низькочастотні складові різниці початкових і трансформованих по частоті високочастотних коливань. В тому каналі, де генерують високочастотні коливання з частотою f1, виділяють комбінаційну низькочастотну складову з частотою F=f/1 – f1 а в тому каналі, де генерують високочастотні коливання з частотою f2, виділяють комбінаційну низькочастотну складову з частотою F = f/2 – f2, при цьому виділені низькочастотні коливання однакової частоти подають на фазометр, де вимірюють різницю фаз між цими двома комбінаційними низькочастотними складовими. На основі зміряної різниці фаз і відомої відстані між антенами розраховують кут приходу радіохвиль по формулі: æ Dj × l ö a = arcsinç ÷, è2×p×dø де - Dj зміряна різниця фаз; l - довжина хвилі випромінювання; d - відстань між приймальними антенами (база інтерферометра). Розташовуючи антени первинного випромінювання і вторинного прийому на площинах крил літального апарату, а антену первинного прийому і вторинного випромінювання (антену ретранслятора) на ЗПС можна визначати курсовий кут літального апарату щодо напряму на антену ретранслятора ЗПС. Вводячи сигнал фазометра в систему автоматичного управління рухом літального апарату і підтримуючи цей сигнал системою автоматичного регулювання на нульовому рівні, можна точно витримувати курсовий кут апарату, співпадаючий з напрямом на антену ретранслятора ЗПС. Просторовий розбіг між антенами інтерферометра можна встановлювати вільно, залежно від цілей і вирішуваних задач, оскільки ці антени не зв'язані між собою фазостабільними фідерами. Цілком зрозуміло, що певний інтерес представляє визначення і підтримка необхідного курсового кута літального апарату відносно не точки розташування антени ретранслятора ЗПС, а осі ЗПС. В основу винаходу поставлена задача автоматичного поєднання подовжньої осі літального апарату з віссю ЗПС. Вона розв'язується завдяки тому, що спочатку в дво х незалежних каналах генерують безперервні високочастотні коливання з двома різними, мало відмінними одна від одної частотами f1 і f2, причому ці коливання через циркулятори подають на дві незалежні антени первинного випромінювання і вторинного прийому, які розташовують на площинах крил літального апарату і первинно випромінюють у напрямі ЗПС, при цьому в площині ЗПС на її осі на деякій відстані одна від одної розташовують кілька, як мінімум дві, антени первинного прийому і вторинного випромінювання для кожного ретранслятора окремо (антени ретрансляторів), при цьому безперервні високочастотні коливання з частотами f1 і f2 антенами кожного ретранслятора первинно приймають і подають на керовані фазообертачі відбивного типа для кожного ретранслятора окремо, фазовий зсув яких регулюють генераторами низької частоти з частотами F1, F2, F3 , і т.д. для кожного ретранслятора окремо, при цьому в первинно прийняті високочастотні коливання в кожному ретрансляторі вводять монотонно наростаючий фазовий зсув, при цьому трансформовані по частоті безперервні високочастотні коливання антенами ретрансляторів повторно випромінюють у напрямі антен первинного випромінювання і вторинного прийому, які розташовують на площинах крил літального апа 5 79787 рату, що рознесені в просторі, причому першим ретранслятором вдруге випромінюють коливання з частотами f11=f1+F1 і f 21=f 2+F 1, др угим ретранслятором вдруге випромінюють коливання з частотами f12=f1+F2 і f 22=f 2+F 2, третім ретранслятором вдруге випромінюють коливання з частотами f13=f1+F 3 і f2 3=f2 +F3 і т.д., при цьому вдруге випромінені ретрансляторами коливання антенами первинного випромінювання і вторинного прийому літального апарату повторно приймають і через два циркулятори подають на два змішувачі в кожному каналі окремо, при цьому в змішувача х прийняті коливання змішують з початковими безперервними високочастотними коливаннями і виділяють комбінаційні низькочастотні складові різниці початкових і трансформованих по частоті високочастотних коливань, при цьому в тому каналі, де генерують високочастотні коливання з частотою f1, виділяють комбінаційні низькочастотні складові з частотами, F1=f 11–f 1, F2=f12–f 1, F 3=f1 3–f1 і т.д., а в тому каналі, де генерують високочастотні коливання з частотою f2, виділяють комбінаційні низькочастотні складові з частотами, F1=f1 2–f2, F2=f 22–f2 , F3=f 23–f 2 і т.д. при цьому виділені низькочастотні коливання з однаковими частотами попарно подають на фазометри, число яких вибирають рівним числу виділених низькочастотних коливань, при цьому на виході цих фазометрів виділяють сигнали, пропорційні різниці фаз між цими парами комбінаційних низькочастотних складових, які подають в систему автоматичного управління рухом літального апарату, при цьому, управляючи положенням літального апарату, підтримують сигнали на виході всіх фазометрів на нульовому рівні, забезпечуючи тим самим автоматичне поєднання продольної осі літального апарату з віссю ЗПС. Порівняння передбачуваного винаходу з вже відомими способами і прототипом показує, що спосіб, що заявляється, проявляє нові технічні властивості, що полягають в можливості автоматичного поєднання подовжньої осі літального апарату з віссю ЗПС. Ці властивості передбачуваного винаходу є новими, оскільки в способі-прототипі через властиві йому недоліки, що полягають у виділенні тільки однієї низькочастотної комбінаційної складової в обох каналах інтерферометра, що виникає при прийомі сигналів тільки від одного ретранслятора, можливе вимірювання різниці фаз між цими комбінаційними низькочастотними складовими в обох каналах інтерферометра і, відповідно, визначення тільки кута приходу радіохвиль щодо точки розташування антени ретранслятора. В пропонованому способі автоматичного поєднання подовжньої осі літального апарату з віссю ЗПС, в первинно прийняті антенами кожного ретранслятора, які розташовані на осі ЗПС на деякій відстані один від одного, безперервні високочастотні коливання з частотами f1 і f2 від дво х незалежних високочастотних генераторів, випромінені через дві незалежні, рознесені в просторі антени первинного випромінювання, які розташовують на площинах крил літального апарату, вводять монотонно наростаючий фазовий зсув в кожному ретрансляторі з своєю швидкістю, вводячи тим самим в початкові 6 безперервні високочастотні коливання різний допплерівський зсув часто ти f1 1=f1+F1 і f21=f2+F1; f12=f1+F 2, і f22=f2+F 2; f 31=f 1+F 3 і f23=f2+F3 і т.д. кожним ретранслятором окремо, які потім перевипромінюють у напрямі антен первинного випромінювання літального апарату. Антенами літального апарату трансформовані по частоті безперервні високочастотні коливання повторно приймають, змішують з початковими високочастотними коливаннями і виділяють в обох каналах комбінаційні низькочастотні складові з однаковими парами частот Допплера, причому в тому каналі, де генерують коливання з частотою, f1 виділяють складові, f11–f 1=F1 , f1 2–f1=F2, f 13–f 1=F 3, і т.д., а в тому каналі, де генерують коливання з частотою f2 виділяють складові f12–f2 =F 1, f2 2–f2=F2, f 32–f 2=F3 і т.д. Після цього виділені низькочастотні складові з частотами, F1, F2 , F 3, і т.д. попарно подають на входи фазометрів, на виході яких виділяють сигнали, пропорційні різниці фаз низькочастотних комбінаційних складових. Виділені сигнали фазометрів подають в систему автоматичного управління положенням літального апарату, при цьому, управляючи положенням літального апарату, підтримують сигнали на виході всіх фазометрів на нульовому рівні, забезпечуючи тим самим автоматичне поєднання подовжньої осі літального апарату з віссю ЗПС. Вказаний спосіб автоматичного поєднання подовжньої осі літального апарату з віссю ЗПС можна реалізувати за допомогою пристрою приведеного на фігурі 1. Пристрій автоматичного поєднання подовжньої осі літального апарату з віссю ЗПС містить генератори високочастотних коливань 1 і 2, Yциркулятори 3 і 4, антени первинною випромінювання і вторинного прийому 5 і 6, змішувачі 7 і 8, вузькосмугові фільтри 9 і 10, 11 і 12, 13 і 14 і т.д., фазометри 15, 16, 17 і т.д., антени первинного прийому і вторинного випромінювання 18, 19, 20 і т.д., керовані фазообертачі відбивного типу 21, 22, 23 і т.д., низькочастотні генератори 24, 25, 26 і т.д., систему автоматичного управління положенням літального апарату 27. Вихід генератора високочастотних коливань 1 сполучений з першим портом Y-циркулятора 3, другий порт якого сполучений з антеною первинного випромінювання і вторинного прийому 5, а третій порт Y-циркулятора 3 сполучений з входом змішувача 7, вихід якого сполучений з входами вузькосмугових фільтрів 9, 11, 13 і т.д., ви ходи яких сполучені з першими входами фазометрів 15, 16, 17 і т.д., причому вихід генератора високочастотних коливань 2 сполучений з першим портом Yциркулятора 4, другий порт якого сполучений з антеною первинного випромінювання і вторинного прийому 6, а третій порт Y-циркулятора 4 сполучений з входом змішувача 8, вихід якого сполучений з входами вузькосмугових фільтрів 10, 12, 14 і т.д., виходи яких сполучені з другими входами фазометрів 15, 16, 17 і т.д., причому виходи фазометрів 15, 16, 17 і т.д. сполучені з входами системи автоматичного управління положенням літального апарату 27, при цьому антена первинного прийому і вторинного випромінювання 18 сполучена з сиг 7 79787 нальним входом керованого фазообертача відбивного типу 21, вхід управління якого сполучений з виходом низькочастотного генератора 24, при цьому антена первинного прийому і вторинного випромінювання 19 сполучена з сигнальним входом керованого фазообертача відбивного типу 22, вхід управління якого сполучений з виходом низькочастотного генератора 25, а антена первинного прийому і вторинного випромінювання 20 сполучена з сигнальним портом керованого фазообертача відбивного типу 23, вхід управління якого сполучений з виходом низькочастотного генератора 26. Пристрій, що реалізовує спосіб автоматичного поєднання подовжньої осі літального апарату з віссю ЗПС, працює таким чином. Високочастотні коливання з початковою амплітудою, частотою f1 і початковою фазою j1 U1 = U 01 × e j×2×p×f1 ×t+ j1 з виходу генератора високочастотних коливань 1 через циркулятор 3 поступають в антену первинного випромінювання і вторинного прийому 5. При цьому у напрямі антен первинного прийому 18, 19, 20 і т.д., які розташовують на осі ЗПС, випромінюють електромагнітну хвилю. Паралельно високочастотні коливання з початковою амплітудою U02, частотою f 2 і початковою фазою j2. U2 = U02 × e j×2×p×f2 ×t+ j2 з виходу генератора високочастотних коливань 2 через циркулятор 4 поступає в антену первинного випромінювання і вторинного прийому 6. При цьому також у напрямі антен первинного прийому 18, 19, 20 і т.д. випромінюють електромагнітну хвилю. Антенами первинного прийому 18, 19, 20 і т.д. обидві високочастотні електромагнітні хвилі уловлюють і далі високочастотні коливання з частотами f1 і f2 подають на сигнальні входи керованих фазообертачів відбивного типа 21, 22, 23 і т.д. Керовані фазообертачі 21, 22, 23 і т.д., реалізують монотонну зміну фази високочастотних коливань. При цьому, якщо за періоди, Т1, Т2, Т 3 і т.д. низькочастотних управляючих сигналів, що поступають з виходів генераторів низької частоти 24, 25, 26 і т.д., реалізується в керованих фазообертачах 21, 22, 23 і т.д., зсув фаз обох високочастотних коливань від 0 до 2p, то можна говорити про зсув спектру обох високочастотних коливань на так звані частоти Допплера 2× p 2× p W1 = = 2 × p × F1 , W2 = = 2 × p × F2 , T1 T2 2× p W3 = = 2 × p × F3 і т.д. T3 Трансформовані по частоті високочастотні коливання, що поступають на антени вторинного випромінювання 18, 19, 20 і т.д. мають вигляд / U1 = U01 × e 1 j×[ 2× p×(f1 +F1 )×t + k1 × x1 + j01 + j1 ] / = U02 × e j×[ 2×p×( f2 +F1)×t +k 2× x2 +j 01+ j2 ] 2 / U1 = U01 × e j×[ 2×p×( f1+F2 )× t +k1×x3 + j 02+ j1] / U2 = U02 × e j×[ 2×p×( f2 +F2 )×t + k2× x4 + j02 + j2 ] 2 і U1 2 і 8 3 U1 = U/ × e j×[2×p ×(f1 + F3 )× t + k 1 × x 5 + j03 + j 1 ] і 01 U3 = U/ × ej×[ 2×p ×( f2 + F3 ) ×t + k 2 × x6 + j03 + j2 ] 2 02 і т.д. де, k1, k 2 - хвильові числа 2 × p × f1 2 × p × f2 k1 = , k2 = c c х1 , х2, х3 , х4, х5, х6, і т.д. - відстані між антенами 5-18, 6-18, 5-19, 6-19, 5-20, 6-20 і т.д. відповідно; j01, j02, j03 і т.д. - початкові фази коливань на виходах низькочастотних генераторів 24, 25, 26 і т.д.; U/01, U/02 - амплітуди високочастотних коливань з урахуванням загасання на трасі розповсюдження радіохвиль, посилення антен і коефіцієнтів передачі всіх ланок пристрою. Для простоти представлення формул коефіцієнти передачі всіх ланок вибрані однаковими. Антенами вторинного випромінювання 18, 19, 20 і т.д. (вони ж антени первинного прийому) ці трансформовані високочастотні коливання випромінюють у напрямі антен вторинного прийому 5 і 6 (вони ж антени первинного випромінювання). При цьому прийняті трансформовані високочастотні коливання через треті порти Y-циркуляторів 3 і 4 поступають в змішувачі 7 і 8, де одержують комбінаційні низькочастотні складові різниці початкових безперервних високочастотних коливань і трансформованих по частоті безперервних високочастотних коливань. При цьому в тому каналі, де генерувалися високочастотні коливання з частотою f1, одержують комбінаційні низькочастотні складові різниці трансформованих по частоті безперервних високочастотних коливань з частотами, f11=f1+F1, f21=f1+F 2, f 13=f1+F 3 і т.д. і початкових коливань з частотою f1 , які відповідно дорівнюють f11–f1=F1, f12–f 1=F2 , f 13–f1=F3 і т.д., а в тому каналі, де генерують коливання з частотою f2, одержують комбінаційні низькочастотні складові різниці трансформованих по частоті безперервних високочастотних коливань з частотами, f12=f2+F1 , f2 2=f2+F2 , f32=f2+F3 і т.д. і початкових коливань з частотою f2, які відповідно дорівнюють f12-f2=F 1, f2 2-f 2=F 2, f3 2-f 2=F3 . Вузькосмугові фільтри 9 і 10, 11 і 12, 13 і 14 і т.д. виділяють попарно коливання з однаковими частотами F1, F2 , F 3 і т.д. Таким чином, на виходах вузькосмугових фільтрів 9 і 10, 11 і 12, 13 і 14 і т.д. матимемо пари низькочастотних коливань з однаковими частотами, F1, F2, F 3 і т.д. і повними фазами, які визначаються такими співвідношеннями j 11 = 2 × p × F1 × t + k 1 × x 1 + j 01 + k 1 × x 1 1 і j 21 = 2 × p × F1 × t + k 2 × x 2 + j01 + k 1 × x 2 2 j 12 = 2 × p × F2 × t + k 1 × x 3 + j 02 + k 2 × x 3 1 і j 22 = 2 × p × F2 × t + k 2 × x 4 + j 02 + k 2 × x 4 2 j 13 = 2 × p × F3 × t + k 1 × x 5 + j 03 + k 3 × x 5 1 j 23 = 2 × p × F3 × t + k 2 × x 6 + j 03 + k 3 × x 6 2 і т.д. 1 1 2 2 3 де, k 1 , k 2, k 1 , k 2, k 1, і т.д. - хвильові числа і 9 79787 2 × p × (f1 + F1 ) 2 × p × (f 2 + F1 ) і k1 = ; 2 c c 2 × p × (f1 + F2 ) 2 × p × (f 2 + F2 ) k2 = і k2 = ; 1 2 c c 2 × p × (f1 + F3 ) 2 × p × (f 2 + F3 ) k3 = і k3 = 1 2 c c і т.д. Як видно з приведених формул, у виразах для повної фази виділених комбінаційних низькочастотних складових відсутні значення початкової фази високочастотних коливань, оскільки вони віднімаються. Частоти початкових високочастотних коливань f1 і f2 вибирають мало відмінними одна від одної. З цієї причини k1 » k2. Окрім цього, частоти Допплера, F1, F2, F3, і т.д. вибирають багато менше частоти початкових високочастотних коливань f1 і f2 . З цієї причини, k11»k1, k 21»k1 , k3 1»k1, k 12»k2 , k2 2»k2, k 32»k2 і т.д. В цьому випадку для різниці фаз комбінаційних низькочастотних коливань з однаковими частотами, F1, F2 , F3, і т.д. на ви ходах вузькосмугових фільтрів 9 і 10, 11 і 12, 13 і 14 і т.д. можна записати Dj1 =2×k×(x1-x2), Dj2 =2×k×(x3-x4), Dj3 =2×k×(x5-x6), і т.д. де k»k1»k2»k11»k12»k3 1»k12»k2 2»k32 і т.д. Таким чином, на виходах фазометрів 15, 16, 17 і т.д. матимемо сигнали, пропорційні різниці відстаней і зворотно пропорційні довжині хвилі в середовищі розповсюдження радіохвиль між антенами первинного випромінювання (вторинного прийому) 5 і 6 і первинного прийому (вторинного випромінювання) 18, 19, 20 і т.д. Ці різниці відстаk1 = 1 Комп’ютерна в ерстка Л.Литв иненко 10 ней між антенами визначають взаємне положення антен літального апарату і антен ретрансляторів ЗПС. При цьому якщо подовжня вісь літального апарату співпадає з віссю ЗПС різниці відстаней, х1– х2, х3-х4, х5– x6 і т.д. рівні нулю попарно, відповідно дорівнюють нулю сигнали на виходах всі х фазометрів 15, 16, 17 і т.д. Задача системи автоматичного управління положенням літального апарату 27 зводиться до того, щоб, аналізуючи сигнали на виходах фазометрів 15, 16, 17 і т.д., управляти положенням літального апарату так, щоб підтримувати сигнали на виході фазометрів 15, 16, 17 і т.д. на н ульовому рівні. Таким чином, одержують автоматичне поєднання подовжньої осі літального апарату з віссю ЗПС. Народногосподарський ефект від використовування передбачуваного винаходу пов'язаний з появою можливості автоматизувати процес приводу лі тального апарату при заході на посадку. Інший аспект підвищення ефективності від використовування передбачуваного винаходу пов'язаний з можливістю автоматизувати не тільки процес приводу літального апарату при заході на посадку, але і автоматизувати весь процес посадки. При цьому антени ретрансляторів ЗПС можна зробити не виступаючими, наприклад щілистими, і розташувати як по всій довжині ЗПС, так і за її межами, уздовж її осі. Самому процесу посадки літального апарату на ЗПС антени в цьому випадку заважати не будуть, проте при цьому з'являється можливість контролювати положення літального апарату при його русі уздовж всієї ЗПС аж до його повної зупинки. Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for aligning the longitudinal axis of the aircraft with the longitudinal axis of the take-off runway
Автори англійськоюShyrokov Ihor Borysovych
Назва патенту російськоюСистема для ориентации продольной оси летательного аппарата по продольной оси взлетно-посадочной полосы
Автори російськоюШироков Игорь Борисович
МПК / Мітки
МПК: G08G 5/00
Мітки: літального, осі, смуги, подовжньої, вирівнювання, злітно-посадкової, відносної, автоматичного, спосіб, апарата
Код посилання
<a href="https://ua.patents.su/5-79787-sposib-avtomatichnogo-virivnyuvannya-podovzhno-osi-litalnogo-aparata-vidnosno-osi-zlitno-posadkovo-smugi.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного вирівнювання подовжньої осі літального апарата відносно осі злітно-посадкової смуги</a>
Установка складаних поплавків літального апарата
Номер патенту: 24947
Опубліковано: 25.07.2007
Автор: Моргун Олександр Павлович
МПК: B64C 25/00
Мітки: установка, апарата, складаних, поплавків, літального
Формула / Реферат:
Установка складаних поплавків літального апарата, що містить певним чином спрофільовані (глісуючі поверхні, реданні виступи) корпуси поплавків і ферму, що з'єднує їх з літальним апаратом, яка відрізняється тим, що ферму виконано з можливістю взаємного перетворення в кулісний семиланковий механізм (і навпаки, механізм в ферму) для складання поплавків в спеціально передбачені для цього ніші в фюзеляжних балках, крилах, мотогондолах.
Спосіб управління технічним станом літального апарата
Номер патенту: 69740
Опубліковано: 15.09.2004
Автори: Петренко Всеволод Григорович, Волошин Ігор Іванович, Щербина Володимир Миколайович, Семон Богдан Йосипович
МПК: G05B 13/00
Мітки: станом, спосіб, літального, управління, технічним, апарата
Формула / Реферат:
Спосіб управління технічним станом літального апарата, при якому отримують параметри технічного стану літального апарата, параметри процесу технічної експлуатації, параметри зовнішніх факторів та параметри мети технічної експлуатації, формують оператор корегування параметрів управління процесу технічної експлуатації відповідного каналу, формують команду управління виконавчим пристроєм відповідного каналу, корегують параметри процесу технічної...
Спосіб подачі компонентів палива в камеру згоряння двигуна літального апарата
Номер патенту: 74847
Опубліковано: 15.02.2006
Автор: Єрмоленко Іван Миколайович
Мітки: двигуна, апарата, згоряння, літального, палива, подачі, камеру, спосіб, компонентів
Формула / Реферат:
Спосіб подачі компонентів палива в камеру згоряння двигуна літального апарата, що включає витіснення компонентів палива з паливних баків під дією газів, що подаються в паливні баки, який відрізняється тим, що гази подають у напрямку, тангенціальному до циліндричної бокової поверхні паливних баків.
Система автоматичного керування, контролю та реєстрації параметрів силової установки літального апарата
Номер патенту: 48884
Опубліковано: 15.02.2005
Автори: Безсчастний Микола Олексійович, БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28
Мітки: параметрів, установки, система, апарата, літального, силової, реєстрації, контролю, автоматичного, керування
Формула / Реферат:
Группа изобретений относится к области получения энергии за счет естественных факторов. Энергокомплекс имеет воздушную тяговую гелиоприемную трубу в виде трубопровода, проложенного по горному образованию. В трубе установлена первая ветротурбина. Выход трубы расположен на уровне холодного атмосферного воздуха. Секция подогрева насыщенного парами воды воздушного потока расположена на входе трубы возле подножия горы. На конечном участке трубы...
Крило літального апарата
Номер патенту: 64342
Опубліковано: 16.02.2004
Автор: Руднєв Юрій Миколайович
Мітки: крило, літального, апарата
Формула / Реферат:
Крило літального апарата, що включає профіль, утворений верхньою і нижньою поверхнями, яке відрізняється тим, що профіль виконаний у вигляді клина, зміщеного від передньої кромки крила і який звужується до задньої кромки крила, а на нижній поверхні профілю по довжині крила закріплені аеродинамічні гребені.
Попередній патент: Спосіб виробництва ковбас паштетних та ліверних
Наступний патент: Повітророзподільник гальма залізничного транспортного засобу
Випадковий патент: Спосіб ранньої діагностики глаукоми