Спосіб горизонтування рлс і пристрій для його здійснення
Номер патенту: 79883
Опубліковано: 25.07.2007
Автори: Чуприна Андрій Андрійович, Лашко Леонід Олексійович, Пресняк Ігор Степанович


Формула / Реферат
1. Спосіб горизонтування РЛС, що полягає у регулюванні висоти чотирьох керованих гідроциліндрами опор, встановлених на рамі, яким переносять навантаження від ваги РЛС з коліс на опори і встановлюють у горизонтальне положення поперечну і подовжню осі рами транспортного засобу, на якому змонтована РЛС, який відрізняється тим, що вимірюють кут відхилення поперечної осі рами ![]() від горизонталі і, якщо
від горизонталі і, якщо ![]() , нахиляють поперечну вісь рами шляхом вмикання гідроциліндрів на збільшення висоти передньої, задньої та однієї бічної опори, у бік якої нахилена поперечна вісь рами, до нахилу її в протилежному напрямку на кут, який визначають за формулою
, нахиляють поперечну вісь рами шляхом вмикання гідроциліндрів на збільшення висоти передньої, задньої та однієї бічної опори, у бік якої нахилена поперечна вісь рами, до нахилу її в протилежному напрямку на кут, який визначають за формулою
![]() , де
, де
![]() - заздалегідь задана величина ходу розвантаження коліс від ваги РЛС,
- заздалегідь задана величина ходу розвантаження коліс від ваги РЛС,
![]() - відстань між бічними опорами,
- відстань між бічними опорами,
![]() - ширина колії транспортного засобу,
- ширина колії транспортного засобу,
у випадку, якщо ![]() , поперечну вісь рами нахиляють на кут
, поперечну вісь рами нахиляють на кут ![]() у бік одної з бічних опор, після цього при постійно увімкнутих гідроциліндрах передньої і задньої опор вимикають гідроциліндр одної з бічних опор і вмикають гідроциліндр протилежної бічної опори на збільшення її висоти, встановлюють поперечну вісь рами горизонтально, потім при вимкнутих гідроциліндрах бічних опор і увімкнутих гідроциліндрах передньої і задньої опор, перемикають на зменшення висоти гідроциліндр передньої або задньої опори, що встановлена на кінці рами, піднятому більш високо, та встановлюють горизонтально подовжню вісь рами.
у бік одної з бічних опор, після цього при постійно увімкнутих гідроциліндрах передньої і задньої опор вимикають гідроциліндр одної з бічних опор і вмикають гідроциліндр протилежної бічної опори на збільшення її висоти, встановлюють поперечну вісь рами горизонтально, потім при вимкнутих гідроциліндрах бічних опор і увімкнутих гідроциліндрах передньої і задньої опор, перемикають на зменшення висоти гідроциліндр передньої або задньої опори, що встановлена на кінці рами, піднятому більш високо, та встановлюють горизонтально подовжню вісь рами.
2. Пристрій для горизонтування РЛС, що містить раму транспортного засобу, установлені на ній регульовані по висоті гідроциліндрами дві бічні, передню і задню опори, і систему живлення гідроциліндрів робочою рідиною, який відрізняється тим, що діаметр робочої порожнини гідроциліндрів бічних опор виконаний таким, що зусилля в опорі, яке розвивається кожним гідроциліндром при робочому тиску рідини в його порожнині, більше половини ваги РЛС у сумі з вертикальною складовою сили реакції в опорі від вітрового навантаження на РЛС, а діаметр робочої порожнини гідроциліндра передньої і задньої опор виконаний таким, що зусилля в опорі, яке розвивається кожним гідроциліндром при робочому тиску рідини в його порожнині, менше половини ваги РЛС, але більше вертикальної складової сили реакції в опорі від вітрового навантаження на РЛС і дебалансу ваги РЛС відносно площини бічних опор.
Текст
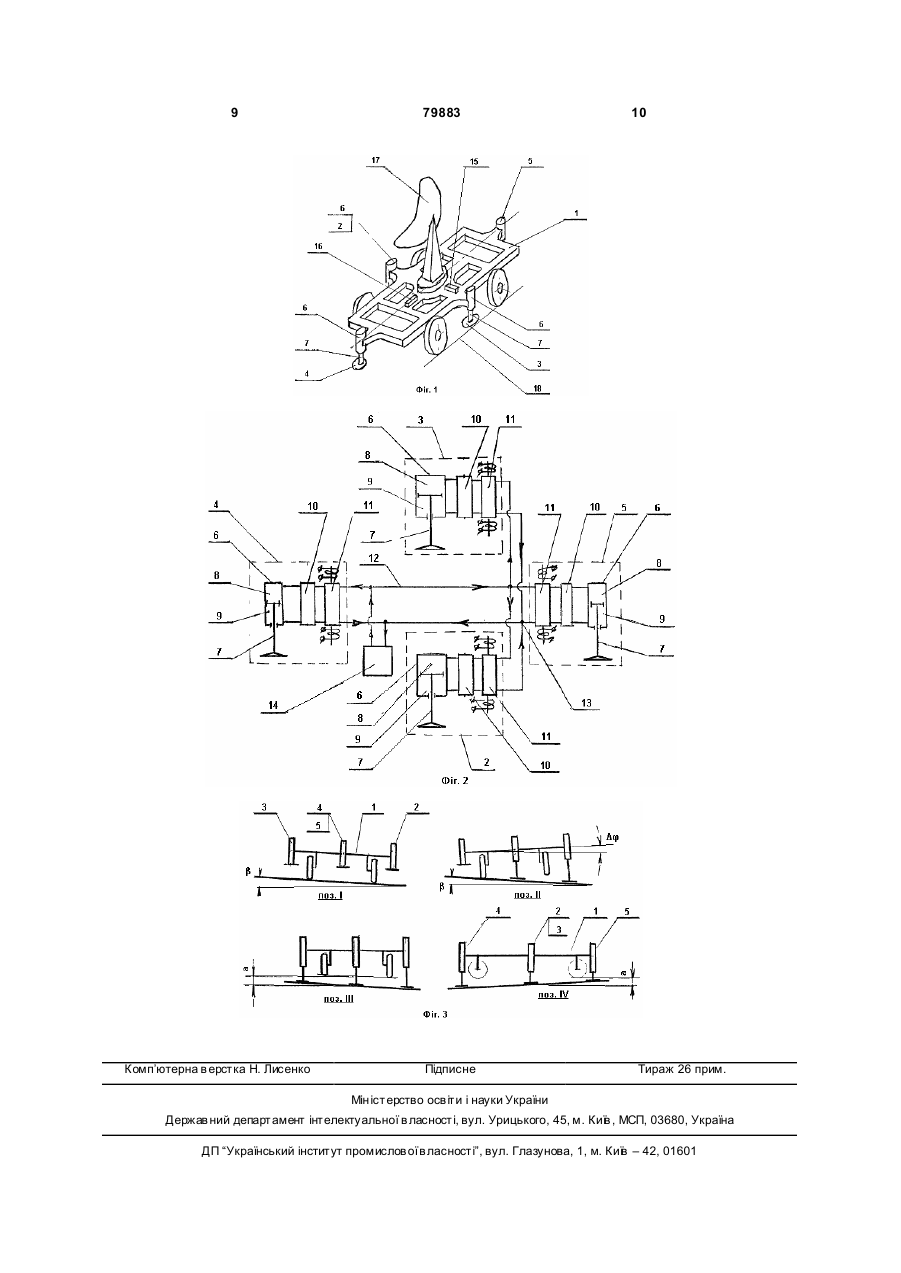
1. Спосіб горизонтування РЛС, що полягає у регулюванні висоти чотирьох керованих гідроциліндрами опор, встановлених на рамі, яким переносять навантаження від ваги РЛС з коліс на опори і встановлюють у горизонтальне положення поперечну і подовжню осі рами транспортного засобу, на якому змонтована РЛС, який відрізняється тим, що вимірюють кут відхилення поперечної осі рами b від горизонталі і, якщо b ¹ 0 , нахиляють поперечну вісь рами шляхом вмикання гідроциліндрів на збільшення висоти передньої, задньої та однієї бічної опори, у бік якої нахилена поперечна вісь рами, до нахилу її в протилежному напрямку на кут, який визначають за формулою 2 UA 1 Винахід відноситься до області радіолокації і може бути використаний в мобільних радіолокаційних станціях (РЛС). Відомі спосіб і пристрій горизонтування РЛС, змонтованої на чотириопорному візку КЛУ-10, КЛУ10М Усть-Катавського вагонобудівного заводу Че лябінської області, заснований на тім, що переносять навантаження від ваги РЛС з коліс на опори і встановлюють у горизонтальне положення поперечну і подовжню осі рами візка шляхом індивідуального регулювання висоти кожної з установле 3 79883 них на рамі чотирьох опор за допомогою встановлених на опорах гвинтови х механізмів. Недоліками способу є висока трудомісткість і необхідність виконання горизонтування вручну через неможливість узгодження роботи гвинтових механізмів опор у статично невизначеній системі. Через статичну невизначеність, що зумовлює нерівномірність і невизначеність навантаження опор, при установці поперечної осі в горизонтальне положення порушується горизонтальність подовжньої осі, і навпаки при установці подовжньої осі порушується положення поперечної осі, що ускладнює процес горизонтування. Найбільш близькими по технічній сутності є спосіб і пристрій горизонтування РЛС [Заявка №20041109606 від 22.11.04р. «Платформа, що горизонтується для апаратури РЛС»], заснований на тім, що поперечну вісь рами транспортного засобу, на якому змонтована РЛС, встановлюють у горизонтальне положення і переносять навантаження від ваги РЛС з коліс на опори шляхом почергового збільшення висоти двох задніх опор за допомогою встановлених на них гідроциліндрів, а потім встановлюють у горизонтальне положення подовжню вісь рами транспортного засобу шляхом паралельного вмикання гідроциліндрів двох передніх опор на збільшення їхньої висоти. Платформа, що горизонтується містить раму транспортного засобу, установлені на рамі регульовані по висоті за допомогою гідроциліндрів дві передні і дві задні опори і систему живлення гідроциліндрів зі спеціальним гідроагрегатом, що зумовлює паралельне з'єднання і роз'єднання робочих порожнин гідроциліндрів передніх опор. Недоліком прототипу є обмеженість сфери його застосування, тому що платформа, що горизонтується, непридатна для використання в РЛС, змонтованих на шасі, в яких опори розташовані так, що лінії, які їх з'єднують, утворюють у плані ромбоподібний чотирикутник, довга діагональ якого збігається з подовжньою віссю рами, а коротка з поперечною. У результаті цього мобільність таких РЛС обмежується високою трудомісткістю і тривалістю горизонтування відомими пристроями і способами. В основу винаходу поставлена задача підвищення мобільності РЛС. Поставлена задача вирішується тим, що спосіб горизонтування РЛС, заснований на тім, що регулюванням висоти чотирьох керованих гідроциліндрами опор, установлених на рамі, переносять навантаження від ваги РЛС з коліс на опори і встановлюють у горизонтальне положення поперечну і подовжню осі рами транспортного засобу, на якому змонтована РЛС, вимірюють кут відхилення поперечної осі рами b від горизонталі, і якщо b ¹ 0 , нахиляють поперечну вісь рами шляхом вмикання гідроциліндрів на збільшення висоти передньої, задньої й однієї бічної опори, убік якої нахилена поперечна вісь рами, до нахилу її в проk tg b 2 тилежному напрямку на кут Dj ³ arctg , де 0,5 (b + k ) a - заздалегідь задана величина ходу розвантаa 4 ження коліс від ваги РЛС, b - відстань між бічними опорами, k - ширина колії транспортного засобу, якщо b = 0 , то поперечну вісь рами нахиляють на кут Dj убік одної з бічних опор, після цього при постійно увімкнутих гідроциліндрах передньої і задньої опор вимикають гідроциліндр бічної опори і вмикають гідроциліндр протилежної бічної опори на збільшення її висоти, встановлюють поперечну вісь рами горизонтально, і після цього при вимкнутих гідроциліндрах бічних опор і увімкнутих гідроциліндрах передньої і задньої опор, перемикають на зменшення висоти гідроциліндр передньої чи задньої опори, що встановлена на кінці рами, піднятому більш високо, і установлюють горизонтально подовжню вісь рами. Причинно-наслідковий зв'язок між сукупністю ознак способу і технічним результатом, що досягається полягає в наступному. Завдяки тому що, вимірюють кут відхилення поперечної осі рами b від горизонталі, і якщо b ¹ 0 , нахиляють поперечну вісь рами шляхом вмикання гідроциліндрів на збільшення висоти передньої, задньої й однієї бічної опори, убік якої нахилена поперечна вісь рами, до нахилу її в проk tg b 2 тилежному напрямку на кут Dj ³ arctg , де 0,5 (b + k ) a - заздалегідь задана величина ходу розвантаження коліс від ваги РЛС, b - відстань між бічними опорами, k - ширина колії транспортного засобу, якщо b = 0 , то поперечну вісь рами нахиляють на кут Dj убік одної з бічних опор, після цього при постійно увімкнутих гідроциліндрах передньої і задньої опор вимикають гідроциліндр бічної опори і вмикають гідроциліндр протилежної бічної опори на збільшення її висоти, встановлюють поперечну вісь рами горизонтально, і після цього при вимкнутих гідроциліндрах бічних опор і увімкнутих гідроциліндрах передньої і задньої опор, перемикають на зменшення висоти гідроциліндр передньої чи задньої опори, що встановлена на кінці рами, піднятому більш високо, і установлюють горизонтально подовжню вісь рами, підвищується мобільність РЛС за рахунок зниження трудомісткості і тривалості процесу горизонтування, незалежно від погодних умов і умов видимості, шляхом заздалегідь заданого розподілу навантаження на опори. Поставлена задача вирішується також тим, що у пристрої для горизонтування РЛС, який містить раму транспортного засобу, установлені на ній регульовані по висоті гідроциліндрами дві бічні, передню і задню опори і систему живлення гідроциліндрів робочою рідиною, діаметр робочої порожнини гідроциліндрів бічних опор виконаний таким, що зусилля в опорі, яке розвивається кожним гідроциліндром при робочому тиску рідини в його порожнині, більше половини ваги РЛС у сумі з вертикальною складовою сили реакції в опорі від вітрового навантаження на РЛС, а діаметр робочої порожнини гідроциліндра передньої і задньої опор виконаний таким, що зусилля в опорі , яке розвивається кожним гідроциліндром при робочому тиску рідини в його порожнині, менше половини ваги a 5 79883 РЛС, але більше вертикальної складової сили реакції в опорі від вітрового навантаження на РЛС і дебалансу ваги РЛС щодо площини бічних опор. Причинно-наслідковий зв'язок між сукупністю ознак заявленого пристрою і технічним результатом, що досягається полягає в наступному. Завдяки тому, що діаметр робочої порожнини гідроциліндрів бічних опор виконаний таким, що зусилля в опорі , яке розвивається кожним гідроциліндром при робочому тиску рідини в його порожнині, більше половини ваги РЛС у сумі з вертикальною складовою сили реакції в опорі від вітрового навантаження на РЛС, а діаметр робочої порожнини гідроциліндра передньої і задньої опор виконаний таким, що зусилля в опорі, яке розвивається кожним гідроциліндром при робочому тиску рідини в його порожнині, менше половини ваги РЛС, але більше вертикальної складової сили реакції в опорі від вітрового навантаження на РЛС і дебалансу ваги РЛС щодо площини бічних опор, підвищується мобільність РЛС. Суть винаходу пояснюється кресленнями, де на Фіг.1 приведений загальний вид пристрою горизонтування РЛС, на Фіг.2 - структурна схема гідросистеми живлення гідроциліндрів пристрою робочою рідиною, на Фіг.3 схематично показана послідовність зміни просторового положення рами в пристрої горизонтування РЛС, при цьому зображені: на поз.І - проекція пристрою горизонтування РЛС на робочій позиції у вихідному положенні вздовж подовжньої осі рами; на поз.ІІ - та сама проекція після розвороту рами на кут Dj навколо лінії контакту коліс із землею; на поз.ІІІ - та сама проекція після установки поперечної осі рами в горизонтальне положення; на поз.ІУ - проекція відгоризонтованного пристрою в напрямі вздовж поперечної осі рами. При цьому, колеса транспортного засобу у поз.ІІ, ІІІ і ІУ умовно зображені у вихідному положенні, показаному в поз.І, без урахування їхнього переміщення убік землі за рахунок пружності ресор при розвантаженні їх від ваги РЛС. Спосіб, що заявляється, реалізують таким чином. Вимірюють кут відхилення поперечної осі рами b транспортного засобу РЛС від горизонталі і, якщо b ¹ 0 , нахиляють в протилежному напрямку поперечну вісь рами вмиканням на збільшення висоти передньої, задньої і бічної опори, убік якої нахилена РЛС, розвертаючи її навколо лінії контакту з поверхнею землі коліс, протилежних включеk tg b 2 ній бічній опорі на кут Dj ³ arctg , де a 0,5 (b + k ) заздалегідь задана величина ходу розвантаження коліс від ваги РЛС, b - відстань між бічними опорами, k - ширина колії транспортного засобу РЛС, а якщо b = 0 , то нахил на кут Dj виконують убік заздалегідь означеної опори, при постійно ввімкнути х передній і задній опорах вмикають іншу бічну опору і встановлюють поперечну вісь рами гоa 6 ризонтально, розвертаючи її навколо точки контакту бічної опори з поверхнею землі, після чого при обох вимкнути х бічних опорах і увімкнутих передній і задній опорах перемикають на зменшення висоти передню чи задню опору, що встановлена на кінці рами, піднятому більш високо,! встановлюють горизонтально подовжню вісь рами, розвертаючи її в такий спосіб навколо лінії, що з'єднує точки контакту бічних опор з поверхнею землі. Пристрій для реалізації пропонованого способу горизонтування РЛС (Фіг.1, Фіг.2) містить раму 1 транспортного засобу, на якій закріплені дві бічні опори 2 і 3 і дві подовжні опори передня 4 і задня 5. Кожна з опор містить гідроциліндр 6 двосторонньої дії, в якому знаходиться рухомий шток 7, поршень якого розділяє робочу порожнину гідроциліндра 6 на дві порожнини: верхню порожнину 8 і нижню порожнину 9. Діаметри верхньої порожнини 8 і нижньої порожнини 9 гідроциліндрів 6 у бічних опорах 2 і 3 виконані такими, що зусилля, яке розвиває кожний з них в бічних опорах 2 і 3 при робочому тиску рідини, більше половини ваги РЛС у сумі з вертикальною складовою сили реакції в бічних опорах 2 і 3 від заданого вітрового навантаження на РЛС, а діаметри верхньої порожнини 8 і нижньої порожнини 9 гідроциліндрів 6 у подовжніх опорах 4 і 5 виконані такими, що зусилля, яке розвиває кожний з них в подовжніх опорах 4 і 5 при робочому тиску рідини, менше половини ваги РЛС, але більше вертикальної складової сили реакції в подовжніх опорах 4 і 5 від заданого вітрового навантаження на РЛС у сумі з дебалансом ваги РЛС щодо площини бічних опор 2 і 3. Верхні порожнини 8 і нижні порожнини 9 кожного гідроциліндра 6 з'єднані трубопроводами з гідрозамками 10, які з'єднані трубопроводами з трипозиційними елекгрогідроклапанами 11, з'єднаними нагнітаючою гідромагістраллю 12 і зливальною магістраллю 13 з насосною станцією 14. На рамі 1 установлений датчик-рівень 15 нахилу поперечної осі рами 1, датчик-рівень 16 нахилу подовжньої осі рами І і антенно-поворотний пристрій 17 РЛС. Центр мас РЛС знаходиться в околі точки перетинання ліній, що з'єднують протилежні опори, а ці лінії є діагоналями ромбоподібного чотирикутника, у вершинах якого розміщені опори, при цьому коротка діагональ збігається з поперечною віссю рами 1, а довга діагональ збігається з подовжньою віссю рами 1. Горизонтують РЛС після зупинки її на позиції в такий спосіб. Якщо робоча площадка позиції має добре помітний нахил до горизонталі, наприклад, якщо на ній мимовільно може котитися незагальмований транспортний засіб, то РЛС установлюють подовжньою віссю поперек нахилу. Пристрій автоматичного керування РЛС визначає за показниками датчика-рівня 15, убік якої з бічних опор нахилена рама 1, визначає величину кута нахилу b поперечної осі рами 1 до горизонталі (поз.І Фіг.3) і включає злектрогідроклапани 11 у позицію, при якій напірна магістраль 12 насосної станції 14 з'єднана через гідрозамки 10 з верхніми порожнинами 8 гідроциліндрів 6 подовжніх опор 4, 5 і бічної опори 7 79883 2, убік якої нахилена рама 1, а зливальна магістраль 13 з'єднана через гідрозамки 10 з нижніми порожнинами 9 гідроциліндрів б подовжніх опор 4, 5 і бічної опори 2. Під тиском робочої рідини рухомі штоки 7 гідроциліндрів 6 бічної опори 2 і подовжніх опор 4, 5 висуваються, упираються в землю і своїм зусиллям розвертають раму 1 навколо лінії 18, яка з'єднує точки контакту переднього і заднього коліс транспортного засобу РЛС з поверхнею землі до відхилення поперечної осі рами 1 від горизонталі в протилежному напрямку, на кут Dj (поз.ІІ Фіг.3), величину якого пристрій автоматичного керування РЛС обчислює по формулі k tg b 2 Dj ³ arctg , або Dj ³ 2a - kb , якщо Dj і 0,5 (b + k ) b+k b в радіанах, з ура хуванням величини кута b , отриманої при зупинці РЛС на позиції. Після нахилу рами 1 на кут Dj пристрій автоматичного керування РЛС переключає електрогідроклапан 11 бічної опори 2 у позицію, при якій жорстко фіксується положення рухомого штока 7 у гідроциліндрі 6 бічної опори 2, а електрогідроклапан 11 бічної опори 3 переключає в позицію, при якій рухомий шток 7 висувається з гідроциліндра б бічної опори 3, збільшуючи її висоту і нахиляючи раму 1 убік зменшення відхилення поперечної осі рами 1 від горизонталі, і після досягнення горизонтального положення рами 1 пристрій автоматичного керування РЛС переключає електрогідроклапан 11 бічної опори 3 у позицію, при якій її висота жорстко фіксується шляхом фіксації рухомого штока 7 у гідроциліндрі 6 і цим жорстко фіксується горизонтальне положення поперечної осі рами 1 (поз.ІІІ Фіг.3). При поперечних нахилах рами 1 збільшується її висота над рівнем землі, а подовжні опори 4 і 5 автоматично відслідковують положення рами 1, постійно її підпираючи зусиллям своїх гідроциліндрів 6, тому що електрогідроклапани 11 подовжніх опор 4 і 5 постійно включені в позицію, при якій верхні порожнини 8 гідроциліндрів 6 цих опор з'єднані з напірною магістраллю 12. Завдяки тому, що діаметри робочих порожнин (верхньої порожнини 8 і нижньої порожнини 9) гідроциліндрів 6 бічних опор 2 і 3 виконані такими, що зусилля, яке розвиває кожний гідроциліндр 6 в цих опорах більше половини ваги РЛС у сумі з вертикальною складовою сили реакції в опорі від вітрового навантаження на РЛС, а діаметр робочих порожнин (верхньої порожнини 8 і нижньої порожнини 9) гідроциліндрів 6 подовжніх опор 4 і 5 виконані такими, що зусилля, яке розвиває кожний гідроциліндр 6 в подовжніх опорах 4 і 5 менше половини ваги РЛС, але більше вертикальної складової сили реакції в опорі від вітрового навантаження на РЛС і дебалансу ваги РЛС щодо площини бічних опор 2 і 3, зусилля подовжніх опор 4 і 5 не впливають на положення поперечної осі рами 1 і не можуть змінити її положення щодо горизонталі. Положення поперечної осі рами 1 щодо горизонталі може бути змінено тільки зусиллям бічних опор 2 і 3. a 8 Після установки поперечної осі рами 1 у горизонтальне положення пристрій автоматичного керування РЛС, за показниками датчика-рівня 16, визначає, убік якої подовжньої опори нахилена подовжня вісь рами 1, переключає електрогідроклапан 11 протилежної подовжньої опори в позицію, при якій нижня порожнина 9 гідроциліндра 6 цієї опори з'єднана через гідрозамок 10 з напірною магістраллю 12, а верхня порожнина 8 зі зливальною магістраллю 13, у результаті чого висота цієї подовжньої опори зменшується за рахунок утягування рухомого штока 7 у гідроциліндр 6, а висота подовжньої опори, убік якої нахилена рама 1, автоматично збільшується і рама 1 розвертається навколо лінії, що з'єднує бічні опори 2 і 3. Після досягнення горизонтального положення подовжньої осі рами 1 пристрій автоматичного керування РЛС по сигналу від датчика-рівня 16 переключає електрогідроклапани 11 обох подовжніх опор 4 і 5 у позицію, при якій верхні порожнини 8 і нижні порожнини 9 гідроциліндрів 6 у цих опорах замикаються гідрозамками 10, і цим фіксується висота подовжніх опор 4 і 5 і горизонтальне положення подовжньої осі рами І (поз.ІУ Фіг.3). Існує вірогідність, коли після зупинки на вихідній позиції (поз.І Фіг.3) кут b = 0 . В цьому випадку нахил на кут Dj виконують тим же способом убік заздалегідь означеної опори. По закінченні горизонтування навантаження від ваги РЛС перенесене з коліс на опори, і всі чотири опори 2, 3, 4 і 5 РЛС навантажені необхідними, заданими заздалегідь, величинами зусиль, а положення подовжньої і поперечної осей рами 1 горизонтальне. Процес перенесення навантаження з коліс на опори, заданого заздалегідь розподілу навантаження між опорами і установки осей рами 1 в горизонтальне положення відбувається одночасно. Показником одночасності являється безперервний на протязі горизонтування рух рами І вверх і підняття при цьому коліс в напрямку від поверхні землі. В процесі підйому рами 1 одночасно відбувається установка її в горизонтальне положення. Контроль висоти підняття рами 1 і горизонтальності її осей проводять по показникам датчиків-рівня 15 і 16. Запропонований спосіб і пристрій для його реалізації дозволяє горизонтувати РДС як у ручному, так і в автоматичному режимі в будь-який час доби і при будь-якій погоді в польових умовах. При горизонтуванні РЛС не потрібно візуального спостереження за положенням коліс, опор і інших елементів щодо землі. Пропонований винахід дозволяє зменшити тривалість і трудомісткість процесу горизонтування, виключає вплив людського фактора в максимальному обсязі, при цьому тривалість процесу горизонтування визначається лише швидкодією механізмів, а надійність горизонтування визначається надійністю механізмів, що підвищує мобільність РЛС. 9 Комп’ютерна в ерстка Н. Лисенко 79883 Підписне 10 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for leveling a radar and a device for the realization of the method
Автори англійськоюPresniak Ihor Stepanovych, Lashko Leonid Oleksiiovych, Chupryna Andrii Andriiovych
Назва патенту російськоюСпособ горизонтирования радиолокационной станции и устройство для осуществления способа
Автори російськоюПресняк Игорь Степанович, Лашко Леонид Алексеевич, Чуприна Андрей Андреевич
МПК / Мітки
Мітки: рлс, здійснення, горизонтування, пристрій, спосіб
Код посилання
<a href="https://ua.patents.su/5-79883-sposib-gorizontuvannya-rls-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб горизонтування рлс і пристрій для його здійснення</a>
Пристрій горизонтування
Номер патенту: 15553
Опубліковано: 17.07.2006
Автори: Войтович Володимир Романович, Лашко Леонід Олексійович, Чуприна Андрій Андрійович
Мітки: горизонтування, пристрій
Формула / Реферат:
Пристрій горизонтування, що містить платформу, обладнану трьома опорами, одна з яких шарнірно з'єднана з гвинтовим домкратом, жорстко встановленим на платформі, а дві інші з'єднані з платформою за допомогою стояків, який відрізняється тим, що пристрій містить шарнірно закріплений на платформі важіль, одне плече якого шарнірно з'єднане з опорами за допомогою тяг, а інше шарнірно з'єднане з платформою за допомогою приводу горизонтування,...
Спосіб позиціювання вантажів на авто- і електронавантажувачах і пристрій для його здійснення
Номер патенту: 54893
Опубліковано: 17.03.2003
Автори: Мальнов Сергій Іванович, Костюк Володимир Володимирович, Кривешко Олег Володимирович, Козлинський Мирослав Петрович
МПК: B66F 9/06
Мітки: авто, пристрій, вантажів, позиціювання, спосіб, електронавантажувачах, здійснення
Формула / Реферат:
1. Спосіб позиціювання вантажів, на авто- і електронавантажувачах при якому вантаж захоплюють, визначають величини напружень, врівноважують вантаж, який відрізняється тим, що величини напружень визначають на кронштейнах рами шасі, а врівноважування вантажу здійснюють переміщенням вил до усунення різниці напружень.2. Пристрій для позиціювання вантажів на авто- і електронавантажувачах, який містить розташовану на кронштейнах рами шасі...
Аутригер для пристрою горизонтування рлс
Номер патенту: 11878
Опубліковано: 16.01.2006
Автори: Лашко Леонід Олексійович, Антюхов Юрій Митрофанович, Чуприна Андрій Андрійович, Широков Олександр Павлович
МПК: B66C 23/78
Мітки: аутригер, горизонтування, пристрою, рлс
Формула / Реферат:
Аутригер для пристрою горизонтування РЛС, що містить опорну плиту, башмак, оснащений у нижній частині кульовою п'ятою, яка взаємодіє з сферичним заглибленням циліндричного вкладиша, встановленого в стакані опорної плити і оснащеного циліндричним буртиком у верхній частині, який відрізняється тим, що між утворюючою поверхнею вкладиша і стаканом опорної плити додатково встановлене пружне кільце з натягом як по внутрішньому, так і по зовнішньому...
Спосіб позиціювання довгомірних вантажів і пристрій для його здійснення
Номер патенту: 17826
Опубліковано: 03.06.1997
Автори: Козлинський Мирослав Петрович, Зінько Роман Володимирович
МПК: B66F 9/06
Мітки: пристрій, здійснення, вантажів, позиціювання, спосіб, довгомірних
Формула / Реферат:
1. Спосіб позиціювання довгомірних вантажів, при якому піднімають вантаж, захоплюють його гаками двотаврової балки, позиціонують, вирівнюючи в ряд, який відрізняється тим, що позиціювання здійснюють шляхом врівноважування.2. Спосіб позиціювання за п. 1, який відрізняється тим, що вантаж врівноважують, визначивши наявність кута перекосу двотаврової балки вантажопідйомного механізму.3. Пристрій для позиціювання довго-мірних...
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині і пристрій для його здійснення
Номер патенту: 19834
Опубліковано: 15.01.2007
Автори: Денис Василь Володимирович, Козлинський Мирослав Петрович
МПК: B60C 23/00
Мітки: здійснення, положення, пристрій, ваги, визначення, транспортного, спосіб, засобу, площині, вертикальний, колісного, центра
Формула / Реферат:
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині, що включає визначення тиску повітря в кожній шині коліс, його порівняння з розрахунковим, який відрізняється тим, що визначають зміну тиску повітря в кожній шині коліс при прямолінійному русі під час гальмування колісного транспортного засобу, визначають величини вертикальних і горизонтальних навантажень на кожне із коліс, за якими визначають...
Попередній патент: Охолоджувальний пристрій для зварювання
Наступний патент: Спосіб виготовлення ортеза на верхню кінцівку
Випадковий патент: Лінія для виробництва гранул з біомаси