Реверсор тяги для авіаційного турбореактивного двигуна
Номер патенту: 80941
Опубліковано: 26.11.2007
Автори: Кольотт Баптіст, Курп'є Александр, Йолан Патрік, Мішо Маріон, Круамарі Марк, Льо Гуеллє Жиль
Формула / Реферат
1. Реверсор тяги для авіаційного турбореактивного двигуна, що містить: дві стулки (10а, 10b), виконані з можливістю переміщення між відкритим і закритим положеннями реверсора тяги, причому кожна із вказаних стулок керується електронною коробкою (18а, 18b) керування, і щонайменше один датчик (40, 42, 43) на кожну стулку, що вимірює принаймні одну характеристику положення зазначеної стулки і зв'язаний з електронною коробкою керування, яка керує даною стулкою, для передачі їй характеристики положення стулки, а електронні коробки керування зв'язані між собою для обміну згаданою характеристикою положення, та автономну цифрову систему керування двигуном ( FADEC ) (20), що має два канали (20а, 20b) зв'язку, кожен з яких зв'язаний із електронними коробками (18а, 18b) керування для одержання від кожної з них характеристики положення кожної зі стулок і даних про режим функціонування кожної з електронних коробок керування, який відрізняється тим, що згадані канали зв'язку сполучені між собою для обміну характеристиками положення стулок і даними про режим функціонування електронних коробок керування, так що пілот літака постійно інформується про положення зазначених стулок і про режим функціонування електронних коробок керування, навіть у разі відмови однієї із вказаних електронних коробок керування й одного з каналів зв'язку автономної цифрової системи керування двигуном (FADEC) (20).
2. Реверсор тяги за п. 1, який відрізняється тим, що кожна стулка виконана з можливістю переміщення під дією щонайменше одного домкрата (12) керування, а реверсор тяги містить для кожної стулки перший датчик (40), розташований на рівні щонайменше одного домкрата керування з можливістю вимірювання положення домкрата керування.
3. Реверсор тяги за п. 2, який відрізняється тим, що перший датчик (40) безперервно вимірює положення домкрата керування.
4. Реверсор тяги за п. 2 або 3, який відрізняється тим, що з кожною стулкою зв'язаний механічний фіксатор (36), що забезпечує утримання вказаної стулки, при цьому реверсор тяги містить для кожної стулки другий датчик (42), що забезпечує дані про стан механічного фіксатора.
5. Реверсор тяги за п. 4, який відрізняється тим, що з кожною стулкою зв'язаний упорний фіксатор (38), що дозволяє забезпечити утримання стулки, при цьому реверсор тяги містить для кожної стулки третій датчик (43), що забезпечує дані про стан упорного фіксатора.
Текст
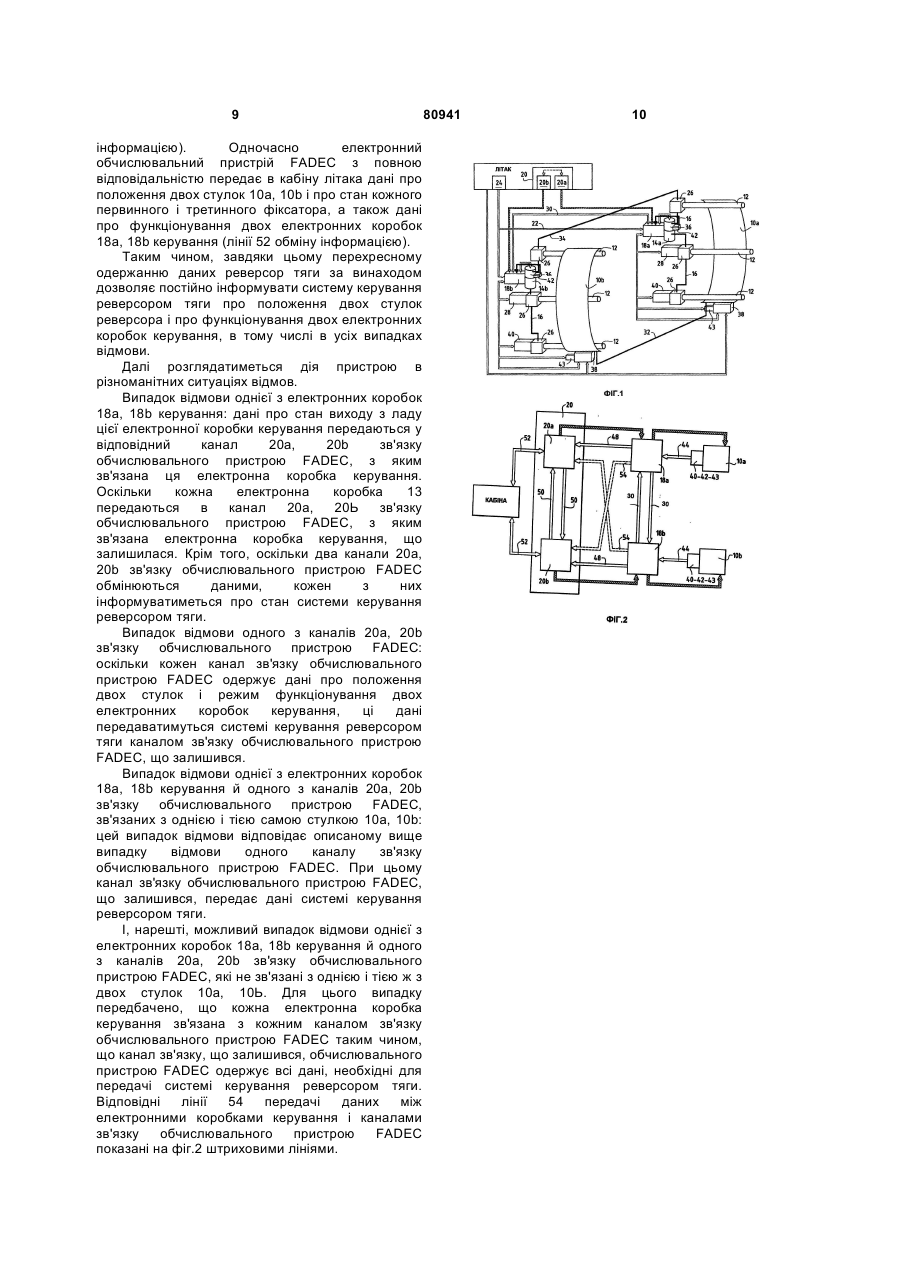
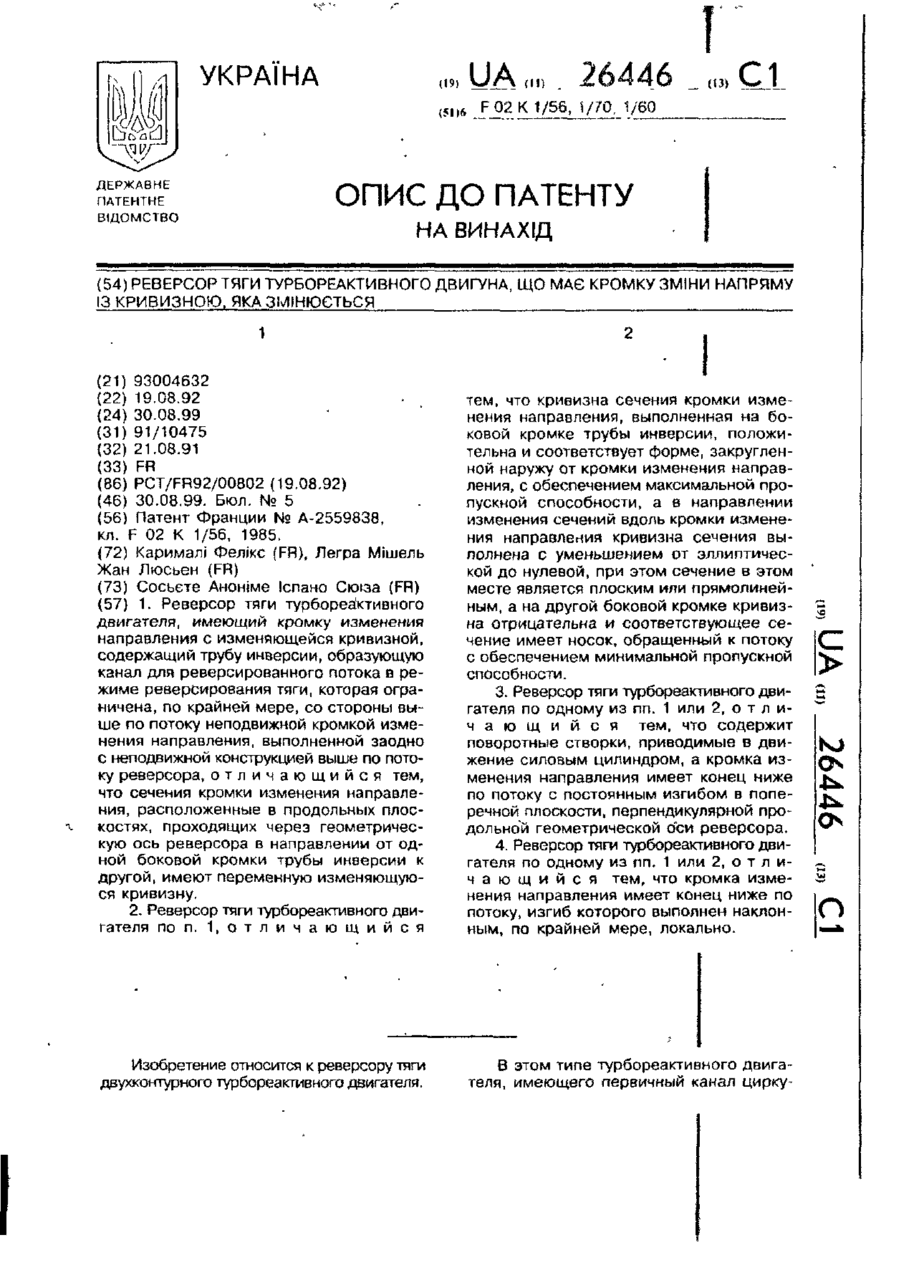
1. Реверсор тяги для авіаційного турбореактивного двигуна, що містить: дві стулки (10а, 10b), виконані з можливістю переміщення між відкритим і закритим положеннями реверсора тяги, причому кожна із вказаних стулок керується електронною коробкою (18а, 18b) керування, і щонайменше один датчик (40, 42, 43) на кожну стулку, що вимірює принаймні одну характеристику положення зазначеної стулки і зв'язаний з електронною коробкою керування, яка керує даною стулкою, для передачі їй характеристики положення стулки, а електронні коробки керування зв'язані між собою для обміну згаданою характеристикою положення, та автономну цифрову систему керування двигуном ( FADEC ) (20), що має два канали (20а, 20b) зв'язку, кожен з яких зв'язаний із електронними коробками (18а, 18b) керування для одержання від кожної з них характеристики положення кожної зі стулок і даних про режим функціонування кожної з C2 2 (11) 1 3 турбореактивного двигуна за допомогою домкратів керування таким чином, щоб при роботі в режимі реверса тяги, тобто у відкритому положенні, утворювати перешкоду для частини потоку газів, що виходять з турбореактивного двигуна, спрямовуючи його вперед таким чином, щоб створювати для літака негативну тягу реверса. Для забезпечення системи керування реверсором тяги точною інформацією про положення, в якому знаходяться стулки реверсора тяги, відоме оснащення стулок множиною датчиків положення, зв'язаних безпосередньо з коробкою керування реверсором. Зазвичай ці датчики розташовані на рівні кожного домкрата керування і зв'язані з детекторами стану кожної системи фіксації реверсора тяги. Таким чином, ці датчики і детектори являють собою засоби для забезпечення надійності роботи пілота, який має бути постійно поінформований про висунуте або втягнене положення реверсора тяги. З патенту [US 6 439 504, кл.НЖ 1/76, від 27.08.2002.] відомий реверсор тяги для авіаційного турбореактивного двигуна, що містить дві стулки, виконані з можливістю переміщення між відкритим і закритим положеннями реверсора тяги, причому кожна із вказаних стулок управляється електронною коробкою керування, і щонайменше, має один датчик на кожну стулку, що вимірює принаймні одну характеристику положення зазначеної стулки і зв'язаний з електронною коробкою керування, яка управляє даною стулкою, для передачі їй характеристики положення стулки, а електронні коробки керування зв'язані між собою для обміну згаданою характеристикою положення, та автономну цифрову систему управління двигуном) (FADEC), що має два канали зв'язку, кожен з яких зв'язаний з електронними коробками керування для одержання від кожної з них характеристики положення кожної зі стулок і даних про режим функціонування кожної з електронних коробок керування. Оскільки реверсор тяги з двома ковзними стулками містить звичайно на кожну стулку три домкрати керування і три різноманітні системи фіксації, для нього потрібна велика кількість датчиків положення. Така велика кількість датчиків призводить до збільшення ризику можливого ушкодження датчиків, так що система в цілому має низьку надійність. Ця множина датчиків також несприятлива для загальної маси реверсора тяги. Крім того, звичайно використовувані датчики положення є датчиками контактного типу, які сигналізують тільки про висунуте або втягнене положення реверсора тяги. Такі датчики не забезпечують одержання достатньо надійної інформації про точне положення стулок реверсора тяги. Практично у випадку блокування або заклинювання однієї зі стулок важко, а іноді навіть неможливо дізнатися про точне положення, в якому знаходиться реверсор тяги. Задача, на вирішення якої спрямований даний винахід, полягає в усуненні зазначених вад за рахунок створення реверсора тяги, який забезпечує постійне знання положення стулок, 80941 4 навіть у випадку ушкодження, з метою підвищення безпеки літака. Відповідно до винаходу для вирішення поставленої задачі пропонується реверсор тяги для авіаційного турбореактивного двигуна, який відрізняється тим, що містить: дві стулки, виконані з можливістю переміщення між положеннями, що відповідають відкритому і закритому положенням реверсора тяги, причому кожна зі стулок управляється електронною коробкою керування, і, щонайменше, один датчик на кожну стулку, що вимірює принаймні одну характеристику положення вказаної стулки і зв'язаний з електронною коробкою керування, яка управляє стулкою, для передачі їй характеристики положення стулки, а електронні коробки керування зв'язані між собою для обміну згаданою характеристикою положення. Реверсор містить також автономну цифрову систему управління двигуном (FADEC), що має два канали зв'язку. Кожен з каналів зв'язку сполучений з електронною коробкою керування для одержання від кожної з електронних коробок керування характеристики положення кожної зі стулок і даних про режим функціонування кожної з електронних коробок керування, причому канали зв'язку сполучені між собою для обміну характеристиками положення стулок і даними про режим функціонування електронних коробок керування. Завдяки такому виконанню пілот літака постійно інформується про положення стулок і про режим функціонування електронних коробок керування, навіть у випадку відмови однієї з електронних коробок керування й одного з каналів зв'язку автономну цифрову систему управління двигуном (FADEC). Таким чином, обмін даними між електронними коробками керування і між каналами зв'язку обчислювального пристрою дозволяє підвищити ефективність передачі даних пілотові літака, зокрема, у випадку відмови однієї з коробок керування або одного з каналів зв'язку обчислювального пристрою. Ця передача даних у літаку забезпечується за рахунок дублювання даних, а не за рахунок великої кількості датчиків, що забезпечує, з одного боку, більш високу надійність, а з іншого боку - зниження загальної маси. Переважно кожна стулка виконана з можливістю переміщення під дією, щонайменше, одного домкрата керування, а реверсор тяги містить для кожної стулки перший датчик, розташований на рівні, щонайменше, одного домкрата керування з можливістю вимірювання положення домкрата керування. Переважно перший датчик безперервно вимірює положення домкрата керування. Безперервне вимірювання положення кожної стулки дозволяє забезпечувати синхронізацію переміщення реверсора тяги. Воно також дозволяє швидко виявляти випадкове заклинювання або блокування реверсора тяги, що обмежує можливі ушкодження, які можуть бути викликані заклинюванням або блокуванням. З кожною стулкою зв'язаний механічний фіксатор, що дозволяє забезпечувати утримання 5 зазначеної стулки, при цьому реверсор тяги містить для кожної стулки другий датчик, що забезпечує дані про стан вказаного механічного фіксатора. Крім того, може бути додатково передбачений упорний фіксатор, що дозволяє забезпечувати утримання зазначеної стулки, при цьому реверсор тяги містить для кожної стулки третій датчик, що забезпечує дані про стан упорного фіксатора. Для того щоб забезпечити працездатність у разі двох незалежних відмов, переважно кожна електронна коробка керування зв'язана з двома каналами зв'язку автономної цифрової системи управління двигуном (FADEC). В результаті пілот літака постійно інформується про положення стулок і про режим функціонування електронних коробок керування, навіть у випадку відмови однієї з електронних коробок керування й одного з каналів зв'язку автономної цифрової системи управління двигуном (FADEC). Перелік фігур креслень Інші властивості і переваги даного винаходу стануть ясні з нижчеподаного опису, що містить посилання на додані креслення, які ілюструють приклад здійснення винаходу, що не вносить жодних обмежень. На кресленнях: фіг. 1 являє собою схему, що ілюструє приклад виконання реверсора тяги за винаходом, фіг. 2 являє собою функціональну схему реверсора тяги в прикладі виконання за фіг.1. Дані, які підтверджують можливість здійснення винаходу Приклад виконання реверсора тяги відповідно до винаходу показаний на фіг.1. 6 Реверсор тяги містить дві стулки 10а, 10Ь, кожна з яких може переміщуватися між відкритим і закритим положеннями інверсора за допомогою домкратів 12 керування. Нафіг.1 представлений варіант з трьома домкратами керування - один центральний домкрат і два домкрати, розташовані на двох бічних краях кожної стулки. Крім того, реверсор тяги містить два електродвигуни 14а, 14b, кожний з яких управляє переміщенням однієї стулки. Ці електродвигуни зв'язані з домкратами 12 керування кожною стулкою 10а, 10b за допомогою гнучких передатних валів 16, що зв'язують між собою домкрати керування кожною стулкою. Кожний електродвигун 14а, 14b установлений безпосередньо на електронній коробці 18а, 18b керування, що управляє всією послідовністю переміщення двох стулок і регулює швидкість обертання електродвигуна. Кожна електронна коробка 18а, 18b керування має електричний зв'язок з одним із двох каналів 20а, 20b зв'язку автономної цифрової системи управління двигуном відомої за назвою FADEC (Full Authority Digital Engine Control - автономна цифрова система управління двигуном. Порядок висування або втягування реверсора тяги передається обчислювальним пристроєм FADEC електронним коробкам 18а, 18b керування. Можливий також варіант, коли електронні коробки 18а, 18b керування вмонтовані в обчислювальний пристрій 80941 6 FADEC. Канали 20а, 20b зв'язку автономної цифрової системи управління двигуном (FADEC) можуть обмінюватися даними між собою. 7 Електроживлення електронних коробок 18а, 18b керування здійснюється по електричній шині 22, приєднаній до електричної мережі 24 літака, на якому встановлений турбореактивний двигун. Електронні коробки керування перетворюють електричний сигнал, адаптуючи його для живлення електродвигунів 14а, 14b. Домкрати 12 керування стулками реверсора тяги є домкратами електромеханічного типу. Вони приводяться в дію коробками 26 передач, установленими на кожному домкраті. Закон керування (за швидкістю або у двопозиційному режимі "увімкнено-вимкнено") стулками 10а, 10Ь реверсора тяги передається від електронних коробок керування на кожний домкрат 12 керування через електродвигуни 14а, 14b, передатні вали 16 і коробки 26 передач (називані також привідними коробками). Для забезпечення можливості ручного керування стулкою, зв'язаною із домкратом керування, зокрема, під час операцій з технічного обслуговування реверсора тяги, на рівні одного з домкратів 12 керування може бути передбачений привідний пристрій 28. У показаному нафіг.1 прикладі виконання центральний домкрат 12 керування оснащений таким привідним пристроєм 28 на рівні свої привідної коробки 26. Оскільки коробки передач (привідні коробки) кожної стулки зв'язані між собою, цей привідний пристрій дозволяє оператору з обслуговування здійснювати керування відкриттям і/або закриттям стулок реверсора тяги, наприклад, за допомогою однієї рукоятки. Доступ до привідного пристрою 28 кожної стулки може бути електрично зв'язаний із електронною коробкою 18а, 18b керування таким чином, щоб переривати електроживлення під час операцій з обслуговування з тим, щоб уникнути будь-якого ризику невчасного висування реверсора тяги. Крім того, електронні коробки 18а, 18b керування можуть обмінюватися даними між собою по лінії 30 електричного зв'язку типу шини. Цей обмін даними між двома електронними коробками керування дозволяє, зокрема, забезпечити порівняння інформації про поточні положення двох стулок. Можуть бути передбачені механічний зв'язок 32 між двома стулками 10а, 10b і гнучкий вал 34 синхронізації, що з'єднує між собою домкрати кожної стулки, для полегшення синхронізації переміщення двох стулок. Реверсор тяги містить три рівні фіксації, що дозволяє забезпечувати незалежне утримування реверсора тяги. Перший рівень фіксації виконується механічним фіксуючим пристроєм 36, називаним первинним фіксатором, який зв'язаний з кожною стулкою реверсора тяги. Кожний первинний фіксатор установлений безпосередньо на електродвигуні 14а, 14b і управляється електронною коробкою 18а, 18b керування. Ці первинні фіксатори 36 дозволяють забезпечувати незалежну фіксацію стулок, з якими вони зв'язані. 7 Як приклад, вони можуть бути виконані у вигляді дискового гальма або блокувального пристрою, що перешкоджає руху передатного вала. З урахуванням того, що дві стулки зв'язані механічно за допомогою зв'язків 32 і 34, первинний фіксатор 36 однієї зі стулок відповідає другому рівню фіксації для іншої стулки, для якої він відповідно утворює вторинний фіксатор. Вторинний фіксатор призначений для обслуговування відповідної стулки у випадку відмови первинного фіксатора. Таким чином, якщо фіксатор однієї зі стулок розглядати як первинний фіксатор, фіксатор іншої стулки може розглядатися як вторинний фіксатор, і навпаки. Третій рівень фіксації забезпечується упорним фіксатором 38, називаним третинним фіксатором, який розташований на бічному краї кожної стулки або однієї стулки. Ці третинні фіксатори можуть бути зв'язані з електронними коробками 18а, 18Ь керування, з обчислювальним пристроєм 20 FADEC і/або безпосередньо з кабіною літака з тим, щоб забезпечувати достатню безпеку функціонування в різноманітних типових ситуаціях. Дійсно, бувши зв'язаними з пристроєм FADEC або з кабіною літака, третинні фіксатори залишаються діючими навіть у випадку відмови електронних коробок 18а, 18b керування. Вони дозволяють здійснити керування стулками реверсора тяги в разі відмови первинного і вторинного фіксаторів. Крім того, реверсор тяги за винаходом містить, щонайменше, один датчик (детектор) на кожну стулку, який вимірює принаймні одну характеристику положення стулки 10а, 10b. Ці датчики (детектори), які дозволяють контролювати відкрите або закрите положення кожної стулки реверсора тяги, зв'язані електричне з тією електронною коробкою 18а, 18b керування, яка управляє положенням даної стулки. Електричне живлення датчиків забезпечується від електронних коробок керування. Переважно реверсор тяги містить на кожну стулку 10а, 10b комплект датчиків, включаючи перший датчик 40, що вимірює характеристику положення стулки, другий датчик 42, що забезпечує дані про стан первинного 10 фіксатора 36, і третій датчик 43, що забезпечує дані про стан третинного фіксатора 38. Перший датчик 40, що вимірює характеристику положення стулки, розташований, наприклад, на рівні коробки 26 зубчатих передач одного з домкратів 12 стулки. Перший датчик 40 зв'язаний з електронною коробкою 18а, 18b керування для передачі їй даних про положення стулки. Переважно перший датчик 40 безперервно вимірює положення домкрата 12 керування, з яким він зв'язаний. Як приклад, перший датчик є електричним датчиком кутового переміщення типу "резольвера" (resolver). Цей датчик дозволяє одержувати електричний сигнал, що характеризує кутове положення ротора (на кресленнях не показаний) коробки 26 передач, установленої на домкраті 12 керування, з яким зв'язаний датчик. Безперервне вимірювання, забезпечуване таким датчиком кутового переміщення, дозволяє дізнаватися кожного даного моменту про 80941 8 положення домкрата керування і за рахунок цього управляти синхронізацією стулок під час їхніх переміщень. Практично таке вимірювання положення дозволяє виявляти будь-яку неузгодженість положення між двома стулками 10а, 10b і відповідно регулювати швидкість обертання двох електродвигунів 14а, 14b за допомогою електронних коробок 18а, 18b керування для досягнення правильного переміщення реверсора тяги. З іншого боку, безперервне вимірювання положення кожної стулки дозволяє виявляти випадкове блокування або заклинювання однієї стулки набагато раніше порівняно до простих контактних датчиків. Це дозволяє уникнути силового впливу електродвигунів на стулки для їхнього переміщення, що звичайно призводить до ще більшого блокування або заклинювання. Таким чином, використання датчиків кутового переміщення забезпечує автоматичний захист реверсора тяги, сприяючи зменшенню можливих ушкоджень до мінімуму. Отже, мінімізуються й витрати на відповідний ремонт. І, нарешті, безперервне вимірювання є засобом виявлення випадкового неспрацьовування фіксаторів 36, 38, яке не було б виявлене; тим самим підвищується безпека. Другі й треті датчики 42, 43 можуть бути детекторами стану первинного фіксатора і третинного фіксатора, які інформують електронні коробки 18а, 18b керування кожною стулкою про стан фіксації або звільнення від фіксації по кожному фіксатору. Другі й треті датчики 42, 43 зв'язані з електронними коробками 18а, 18b керування для передачі їм даних про стан фіксаторів. Як приклад, датчики можуть бути датчиками наближення оптичного або магнітного типу або механічними контактними датчиками. Як показано на фіг.2, датчики 40, 42, 43 кожної стулки 10а, 10b передають (по лініях 44 обміну інформацією) тій електронній коробці 18а, 18b керування, яка управляє даною стулкою, дані про положення стулки і про стан кожного первинного й третинного фіксатора. Електронні коробки 18а, 18b зв'язані між собою лінією 30 електричного зв'язку (див. фіг.1), обмінюються даними про положення кожної стулки і про стан кожного первинного і третинного фіксатора (лінії 30 обміну інформацією, так що кожна електронна коробка керування одержує дані від двох комплектів датчиків. Таким чином, канали 20а, 20b зв'язку обчислювального пристрою 20 FADEC, зв'язані з кожною електронною коробкою 18а, 18b керування, одержують дані від двох комплектів датчиків 40, 42, 43 (лінії 48 обміну інформацією) та індивідуально інформуються про положення кожної стулки 10а, 10b і про стан кожного первинного і третинного фіксатора. При цьому кожна електронна коробка 18а, 18b керування посилає також дані щодо свого власного функціонування відповідному каналу 20а, 20b зв'язку обчислювального пристрою FADEC (лінії 48 обміну інформацією). Канали зв'язку обчислювального пристрою FADEC можуть обмінюватися даними між собою (лінії 50 обміну 9 інформацією). Одночасно електронний обчислювальний пристрій FADEC з повною відповідальністю передає в кабіну літака дані про положення двох стулок 10а, 10b і про стан кожного первинного і третинного фіксатора, а також дані про функціонування двох електронних коробок 18а, 18b керування (лінії 52 обміну інформацією). Таким чином, завдяки цьому перехресному одержанню даних реверсор тяги за винаходом дозволяє постійно інформувати систему керування реверсором тяги про положення двох стулок реверсора і про функціонування двох електронних коробок керування, в тому числі в усіх випадках відмови. Далі розглядатиметься дія пристрою в різноманітних ситуаціях відмов. Випадок відмови однієї з електронних коробок 18а, 18b керування: дані про стан виходу з ладу цієї електронної коробки керування передаються у відповідний канал 20а, 20b зв'язку обчислювального пристрою FADEC, з яким зв'язана ця електронна коробка керування. Оскільки кожна електронна коробка 13 передаються в канал 20а, 20Ь зв'язку обчислювального пристрою FADEC, з яким зв'язана електронна коробка керування, що залишилася. Крім того, оскільки два канали 20а, 20b зв'язку обчислювального пристрою FADEC обмінюються даними, кожен з них інформуватиметься про стан системи керування реверсором тяги. Випадок відмови одного з каналів 20а, 20b зв'язку обчислювального пристрою FADEC: оскільки кожен канал зв'язку обчислювального пристрою FADEC одержує дані про положення двох стулок і режим функціонування двох електронних коробок керування, ці дані передаватимуться системі керування реверсором тяги каналом зв'язку обчислювального пристрою FADEC, що залишився. Випадок відмови однієї з електронних коробок 18а, 18b керування й одного з каналів 20а, 20b зв'язку обчислювального пристрою FADEC, зв'язаних з однією і тією самою стулкою 10а, 10b: цей випадок відмови відповідає описаному вище випадку відмови одного каналу зв'язку обчислювального пристрою FADEC. При цьому канал зв'язку обчислювального пристрою FADEC, що залишився, передає дані системі керування реверсором тяги. І, нарешті, можливий випадок відмови однієї з електронних коробок 18а, 18b керування й одного з каналів 20а, 20b зв'язку обчислювального пристрою FADEC, які не зв'язані з однією і тією ж з двох стулок 10а, 10Ь. Для цього випадку передбачено, що кожна електронна коробка керування зв'язана з кожним каналом зв'язку обчислювального пристрою FADEC таким чином, що канал зв'язку, що залишився, обчислювального пристрою FADEC одержує всі дані, необхідні для передачі системі керування реверсором тяги. Відповідні лінії 54 передачі даних між електронними коробками керування і каналами зв'язку обчислювального пристрою FADEC показані на фіг.2 штриховими лініями. 80941 10
ДивитисяДодаткова інформація
Назва патенту англійськоюTurbojet thrust reverser
Автори англійськоюCOLOTTE BAPTISTE, COURPIED ALEXANDRE, CROIXMARIE MARC, JOLAND PATRICK RENE DENIS, LE GOUELLEC GILLES, MICHAU MARION
Назва патенту російськоюРеверсор тяги для авиационного турбореактивного двигателя
Автори російськоюКольотт Баптист, Курпье Александр, Круамари Марк, Йолан Патрик, Льо Гуелле Жиль, Мишо Марион
МПК / Мітки
МПК: F02K 1/56
Мітки: двигуна, тяги, авіаційного, реверсор, турбореактивного
Код посилання
<a href="https://ua.patents.su/5-80941-reversor-tyagi-dlya-aviacijjnogo-turboreaktivnogo-dviguna.html" target="_blank" rel="follow" title="База патентів України">Реверсор тяги для авіаційного турбореактивного двигуна</a>
Реверсор тяги турбоактивного двигуна, що має кромку зміни напряму, із кривизною, яка змінюється
Номер патенту: 26446
Опубліковано: 30.08.1999
Автори: Карималі Фелікс, Легра Мішель Жан Люсьен
МПК: F02K 1/56, F02K 1/60, F02K 1/70
Мітки: кривизною, зміни, тяги, яка, реверсор, має, двигуна, напряму, кромку, турбоактивного, змінюється
Формула / Реферат:
1. Реверсор тяги турбореактивного двигателя, имеющий кромку изменения направления с изменяющейся кривизной, содержащий трубу инверсии, образующую канал для реверсированного потока в режиме реверсирования тяги, которая ограничена, по крайней мере, со стороны выше по потоку неподвижной кромкой изменения направления, выполненной заодно с неподвижной конструкцией выше по потоку реверсора, отличающийся тем, что сечения кромки изменения...
Пристрій реверсування тяги турбореактивного двоконтурного двигуна
Номер патенту: 78810
Опубліковано: 25.04.2007
Автори: Бірюков Сергій Петрович, Сопітько Сергій Вячеславович, Бугрін Володимир Миколайович, Шерембей Борис Сергійович
МПК: B64D 31/00, F02K 1/12, F02K 3/00
Мітки: двоконтурного, тяги, турбореактивного, пристрій, реверсування, двигуна
Формула / Реферат:
1. Пристрій реверсування тяги турбореактивного двоконтурного двигуна, що містить нерухомий корпус з розміщеними навколо синхронізуючого кільця відхиляючими ґратами, навколо яких рухомо встановлений обтічник, взаємозв'язаний із синхронізуючим кільцем і поворотними передніми та задніми стулками, шарнірно об'єднаними в пари, V-подібні в положенні реверсування, який відрізняється тим, що обтічник взаємозв'язаний із синхронізуючим кільцем за...
Система управління створками реверсу тяги турбореактивного двигуна
Номер патенту: 16309
Опубліковано: 29.08.1997
Автори: Поляченко Юхим Абрамович, Саранча Володимир Петрович, Снєжков Олександр Дмитрович
МПК: B64D 33/00
Мітки: система, реверсу, турбореактивного, двигуна, створками, тяги, управління
Формула / Реферат:
Система управления створками реверса тяги турбореактивного двигателя, содержащая двухпозиционный приводной гидроцилиндр, соединенный качалкой со створкой реверса, приводной гидроцилиндр замка, фиксирующего створку в полетном положении, золотниковый кран управления гидроцилиндрами, и вал управления золотником крана, связанный с рычагом управления двигателем, отличающаяся тем, что, с целью повышения надежности работы системы путем...
Реактивне сопло турбореактивного двигуна
Номер патенту: 46171
Опубліковано: 15.05.2002
Автори: Шар'є Жилль Ален, Гіонне Ксав'є Жан-Мішель Андре, Роллен Жилль Луі
Мітки: турбореактивного, реактивне, двигуна, сопло
Формула / Реферат:
1. Реактивне сопло турбореактивного двигуна, встановленого на надзвуковому літаку, що включає розташований в зовнішньому обтічнику канал відведення вихлопних газів, по якому при роботі двигуна витікає газовий струмінь, декілька гарячих поворотних щитків, що монтуються в нижньому кінці каналу, декілька холодних поворотних щитків, що монтуються в нижньому кінці обтічника, механізм реверса тяги з двома ідентичними поворотними стулками, що...
Панель для обслуговування та гальмування для реверсора тяги
Номер патенту: 79740
Опубліковано: 25.07.2007
Автори: Мішо Маріон, Кольотт Баптіст, Круамарі Марк, Льо Гуеллє Жиль, Курп'є Александр
МПК: F02K 1/56
Мітки: тяги, гальмування, реверсора, обслуговування, панель
Формула / Реферат:
1. Реверсор тяги для турбореактивного двигуна з потоками первинного і вторинного повітря, що містить щонайменше одну рухливу частину (12), виконану з можливістю її переміщення та створення відхиляючої перешкоди для потоку в режимі реверса тяги, під дією щонайменше одного домкрата (22) керування, щонайменше одну коробку (28) ручного керування, що містить привідний пристрій (28а), для керування вручну рухливою частиною (12), що зв'язана з...
Попередній патент: Пристрій для визначення продуктивності паралельно включених газоперекачувальних агрегатів компресорного цеху
Наступний патент: Транспортний засіб
Випадковий патент: Спосіб отримання рослинної субстанції з жовчогінною та гепатопротекторною активністю