Магнітний захват


Формула / Реферат
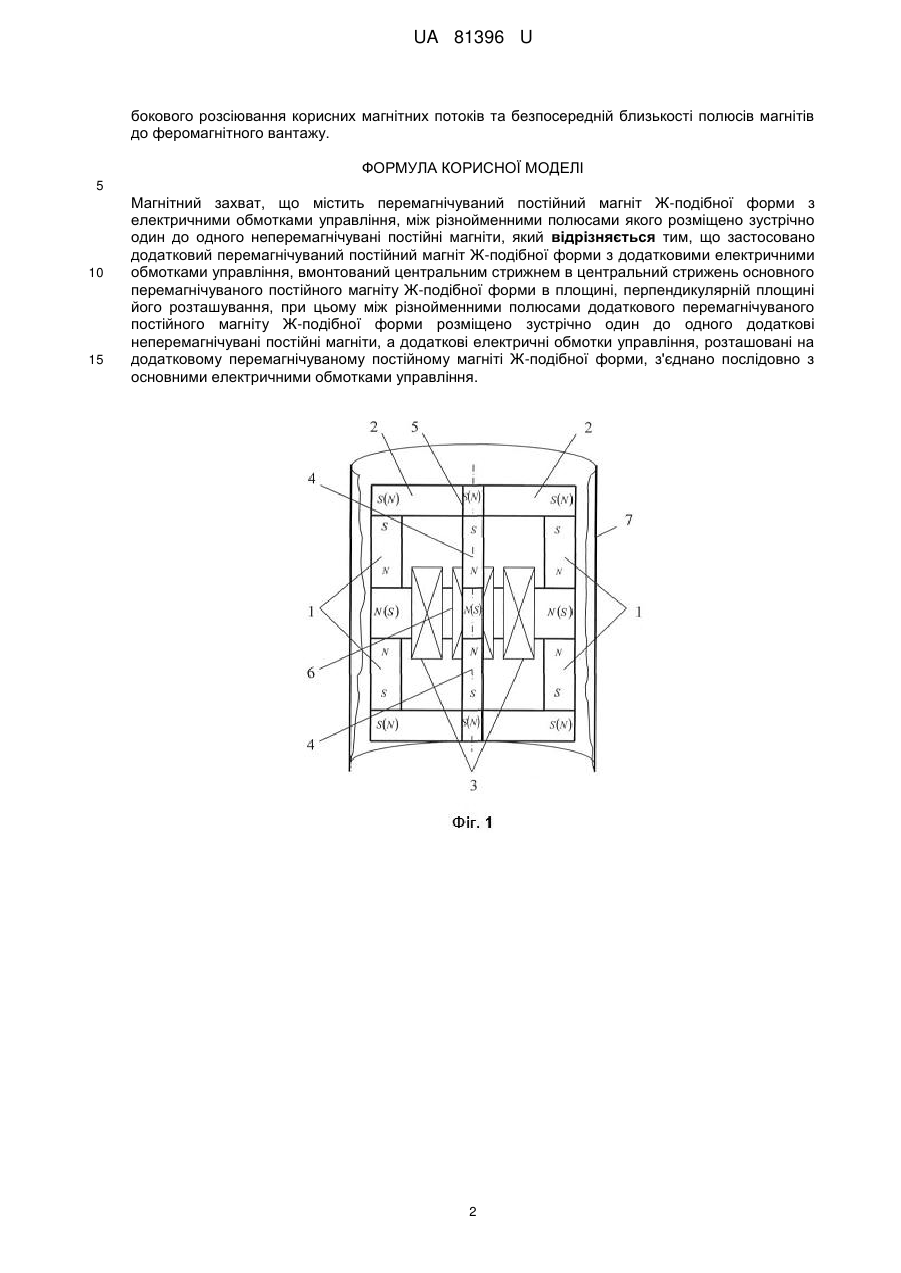
Магнітний захват, що містить перемагнічуваний постійний магніт Ж-подібної форми з електричними обмотками управління, між різнойменними полюсами якого розміщено зустрічно один до одного неперемагнічувані постійні магніти, який відрізняється тим, що застосовано додатковий перемагнічуваний постійний магніт Ж-подібної форми з додатковими електричними обмотками управління, вмонтований центральним стрижнем в центральний стрижень основного перемагнічуваного постійного магніту Ж-подібної форми в площині, перпендикулярній площині його розташування, при цьому між різнойменними полюсами додаткового перемагнічуваного постійного магніту Ж-подібної форми розміщено зустрічно один до одного додаткові неперемагнічувані постійні магніти, а додаткові електричні обмотки управління, розташовані на додатковому перемагнічуваному постійному магніті Ж-подібної форми, з'єднано послідовно з основними електричними обмотками управління.
Текст
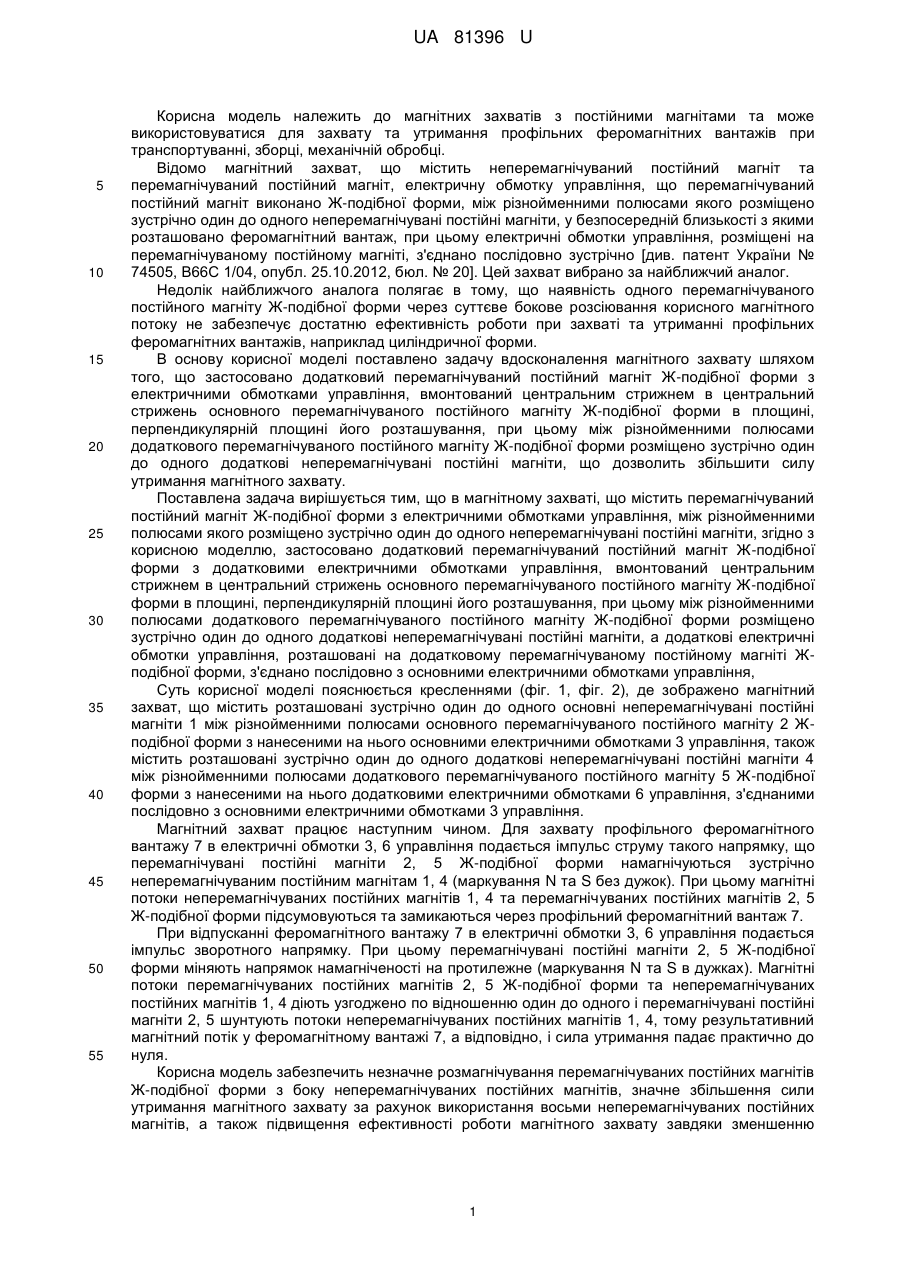
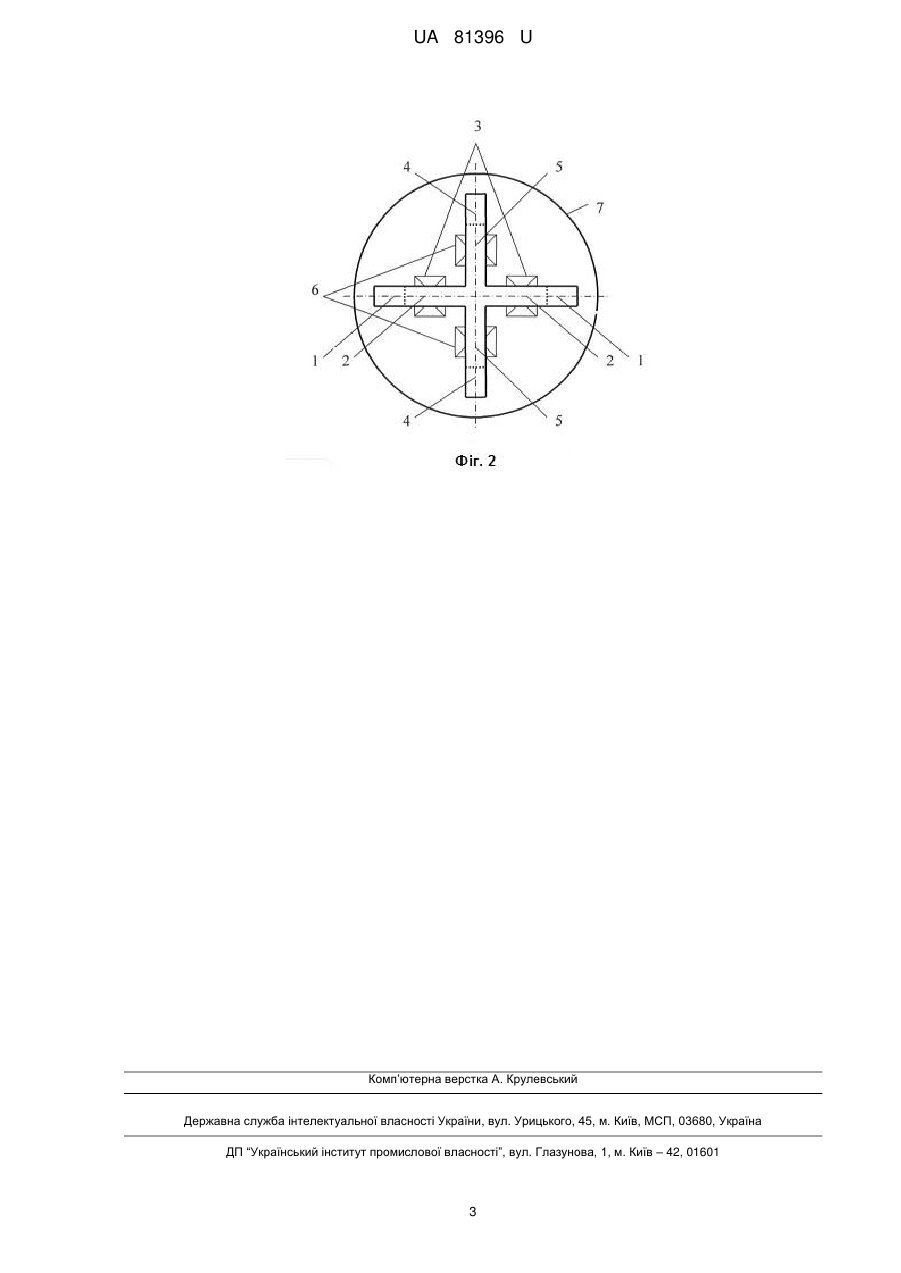
Реферат: UA 81396 U UA 81396 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до магнітних захватів з постійними магнітами та може використовуватися для захвату та утримання профільних феромагнітних вантажів при транспортуванні, зборці, механічній обробці. Відомо магнітний захват, що містить неперемагнічуваний постійний магніт та перемагнічуваний постійний магніт, електричну обмотку управління, що перемагнічуваний постійний магніт виконано Ж-подібної форми, між різнойменними полюсами якого розміщено зустрічно один до одного неперемагнічувані постійні магніти, у безпосередній близькості з якими розташовано феромагнітний вантаж, при цьому електричні обмотки управління, розміщені на перемагнічуваному постійному магніті, з'єднано послідовно зустрічно [див. патент України № 74505, В66С 1/04, опубл. 25.10.2012, бюл. № 20]. Цей захват вибрано за найближчий аналог. Недолік найближчого аналога полягає в тому, що наявність одного перемагнічуваного постійного магніту Ж-подібної форми через суттєве бокове розсіювання корисного магнітного потоку не забезпечує достатню ефективність роботи при захваті та утриманні профільних феромагнітних вантажів, наприклад циліндричної форми. В основу корисної моделі поставлено задачу вдосконалення магнітного захвату шляхом того, що застосовано додатковий перемагнічуваний постійний магніт Ж-подібної форми з електричними обмотками управління, вмонтований центральним стрижнем в центральний стрижень основного перемагнічуваного постійного магніту Ж-подібної форми в площині, перпендикулярній площині його розташування, при цьому між різнойменними полюсами додаткового перемагнічуваного постійного магніту Ж-подібної форми розміщено зустрічно один до одного додаткові неперемагнічувані постійні магніти, що дозволить збільшити силу утримання магнітного захвату. Поставлена задача вирішується тим, що в магнітному захваті, що містить перемагнічуваний постійний магніт Ж-подібної форми з електричними обмотками управління, між різнойменними полюсами якого розміщено зустрічно один до одного неперемагнічувані постійні магніти, згідно з корисною моделлю, застосовано додатковий перемагнічуваний постійний магніт Ж-подібної форми з додатковими електричними обмотками управління, вмонтований центральним стрижнем в центральний стрижень основного перемагнічуваного постійного магніту Ж-подібної форми в площині, перпендикулярній площині його розташування, при цьому між різнойменними полюсами додаткового перемагнічуваного постійного магніту Ж-подібної форми розміщено зустрічно один до одного додаткові неперемагнічувані постійні магніти, а додаткові електричні обмотки управління, розташовані на додатковому перемагнічуваному постійному магніті Жподібної форми, з'єднано послідовно з основними електричними обмотками управління, Суть корисної моделі пояснюється кресленнями (фіг. 1, фіг. 2), де зображено магнітний захват, що містить розташовані зустрічно один до одного основні неперемагнічувані постійні магніти 1 між різнойменними полюсами основного перемагнічуваного постійного магніту 2 Жподібної форми з нанесеними на нього основними електричними обмотками 3 управління, також містить розташовані зустрічно один до одного додаткові неперемагнічувані постійні магніти 4 між різнойменними полюсами додаткового перемагнічуваного постійного магніту 5 Ж-подібної форми з нанесеними на нього додатковими електричними обмотками 6 управління, з'єднаними послідовно з основними електричними обмотками 3 управління. Магнітний захват працює наступним чином. Для захвату профільного феромагнітного вантажу 7 в електричні обмотки 3, 6 управління подається імпульс струму такого напрямку, що перемагнічувані постійні магніти 2, 5 Ж-подібної форми намагнічуються зустрічно неперемагнічуваним постійним магнітам 1, 4 (маркування N та S без дужок). При цьому магнітні потоки неперемагнічуваних постійних магнітів 1, 4 та перемагнічуваних постійних магнітів 2, 5 Ж-подібної форми підсумовуються та замикаються через профільний феромагнітний вантаж 7. При відпусканні феромагнітного вантажу 7 в електричні обмотки 3, 6 управління подається імпульс зворотного напрямку. При цьому перемагнічувані постійні магніти 2, 5 Ж-подібної форми міняють напрямок намагніченості на протилежне (маркування N та S в дужках). Магнітні потоки перемагнічуваних постійних магнітів 2, 5 Ж-подібної форми та неперемагнічуваних постійних магнітів 1, 4 діють узгоджено по відношенню один до одного і перемагнічувані постійні магніти 2, 5 шунтують потоки неперемагнічуваних постійних магнітів 1, 4, тому результативний магнітний потік у феромагнітному вантажі 7, а відповідно, і сила утримання падає практично до нуля. Корисна модель забезпечить незначне розмагнічування перемагнічуваних постійних магнітів Ж-подібної форми з боку неперемагнічуваних постійних магнітів, значне збільшення сили утримання магнітного захвату за рахунок використання восьми неперемагнічуваних постійних магнітів, а також підвищення ефективності роботи магнітного захвату завдяки зменшенню 1 UA 81396 U бокового розсіювання корисних магнітних потоків та безпосередній близькості полюсів магнітів до феромагнітного вантажу. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 Магнітний захват, що містить перемагнічуваний постійний магніт Ж-подібної форми з електричними обмотками управління, між різнойменними полюсами якого розміщено зустрічно один до одного неперемагнічувані постійні магніти, який відрізняється тим, що застосовано додатковий перемагнічуваний постійний магніт Ж-подібної форми з додатковими електричними обмотками управління, вмонтований центральним стрижнем в центральний стрижень основного перемагнічуваного постійного магніту Ж-подібної форми в площині, перпендикулярній площині його розташування, при цьому між різнойменними полюсами додаткового перемагнічуваного постійного магніту Ж-подібної форми розміщено зустрічно один до одного додаткові неперемагнічувані постійні магніти, а додаткові електричні обмотки управління, розташовані на додатковому перемагнічуваному постійному магніті Ж-подібної форми, з'єднано послідовно з основними електричними обмотками управління. 2 UA 81396 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMagnetic gripper
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюМагнитный захват
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: B66C 1/04
Код посилання
<a href="https://ua.patents.su/5-81396-magnitnijj-zakhvat.html" target="_blank" rel="follow" title="База патентів України">Магнітний захват</a>
Магнітний захват
Номер патенту: 81338
Опубліковано: 25.06.2013
Автор: Смірний Михайло Федорович
МПК: B66C 1/04
Формула / Реферат:
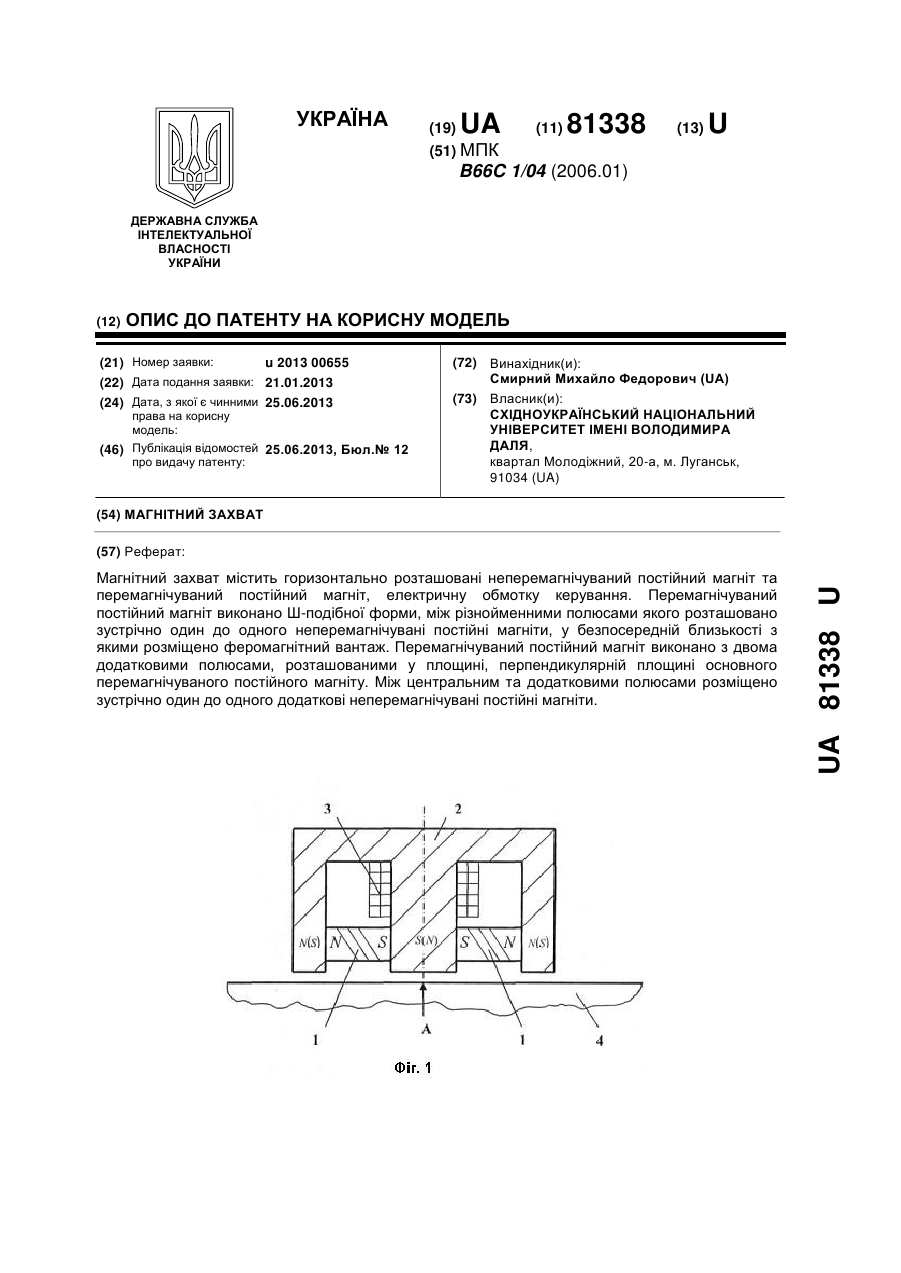
Магнітний захват, що містить горизонтально розташовані неперемагнічуваний постійний магніт та перемагнічуваний постійний магніт, електричну обмотку керування, перемагнічуваний постійний магніт виконано Ш-подібної форми, між різнойменними полюсами якого розташовано зустрічно один до одного неперемагнічувані постійні магніти, у безпосередній близькості з якими розміщено феромагнітний вантаж, який відрізняється тим, що перемагнічуваний...
Магнітний захват
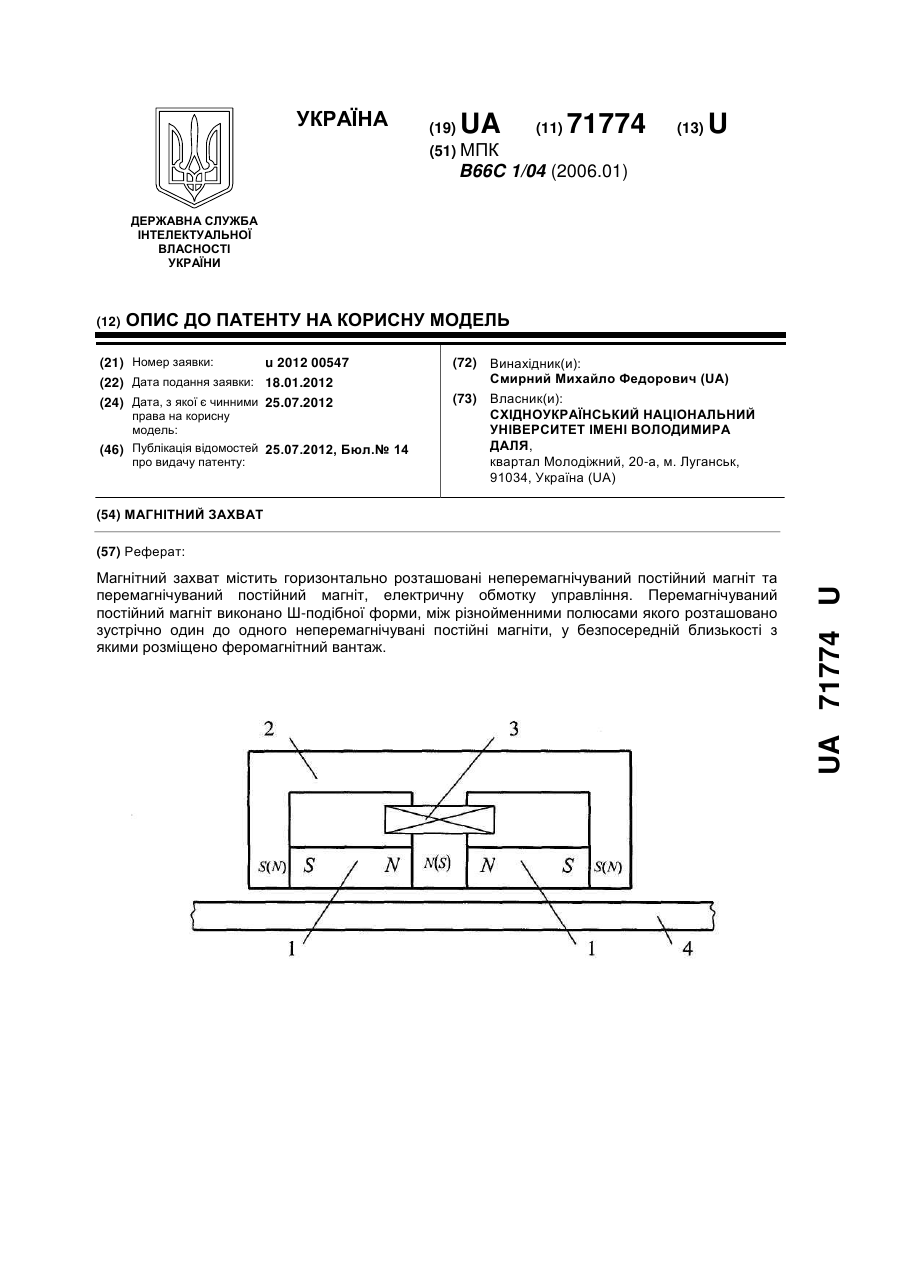
Номер патенту: 71774
Опубліковано: 25.07.2012
Автор: Смірний Михайло Федорович
МПК: B66C 1/04
Формула / Реферат:
Магнітний захват, що містить горизонтально розташовані неперемагнічуваний постійний магніт та перемагнічуваний постійний магніт, електричну обмотку управління, який відрізняється тим, що перемагнічуваний постійний магніт виконано Ш- подібної форми, між різнойменними полюсами якого розташовано зустрічно один до одного неперемагнічувані постійні магніти, у безпосередній близькості з якими розміщено феромагнітний вантаж.
Магнітний захват

Номер патенту: 77035
Опубліковано: 25.01.2013
Автор: Смірний Михайло Федорович
МПК: B66C 1/04
Формула / Реферат:
Магнітний захват, що містить неперемагнічуваний постійний магніт та перемагнічуваний постійний магніт, електричну обмотку управління, який відрізняється тим, що перемагнічуваний постійний магніт виконано Н-подібної форми, між різнойменними полюсами якого розміщено неперемагнічувані постійні магніти, а між однойменними полюсами перемагнічуваного постійного магніту - вставки, виконані з магнітом'якого матеріалу, у безпосередній близькості з...
Магнітний захват

Номер патенту: 74505
Опубліковано: 25.10.2012
Автор: Смірний Михайло Федорович
МПК: B66C 1/04
Формула / Реферат:
Магнітний захват, що містить неперемагнічуваний постійний магніт та перемагнічуваний постійний магніт, електричну обмотку управління, який відрізняється тим, що перемагнічуваний постійний магніт виконано Ж-подібної форми, між різнойменними полюсами якого розміщено зустрічно один до одного неперемагнічувані постійні магніти, у безпосередній близькості з якими розташовано феромагнітний вантаж, при цьому електричні обмотки управління, розміщені...
Магнітний захват
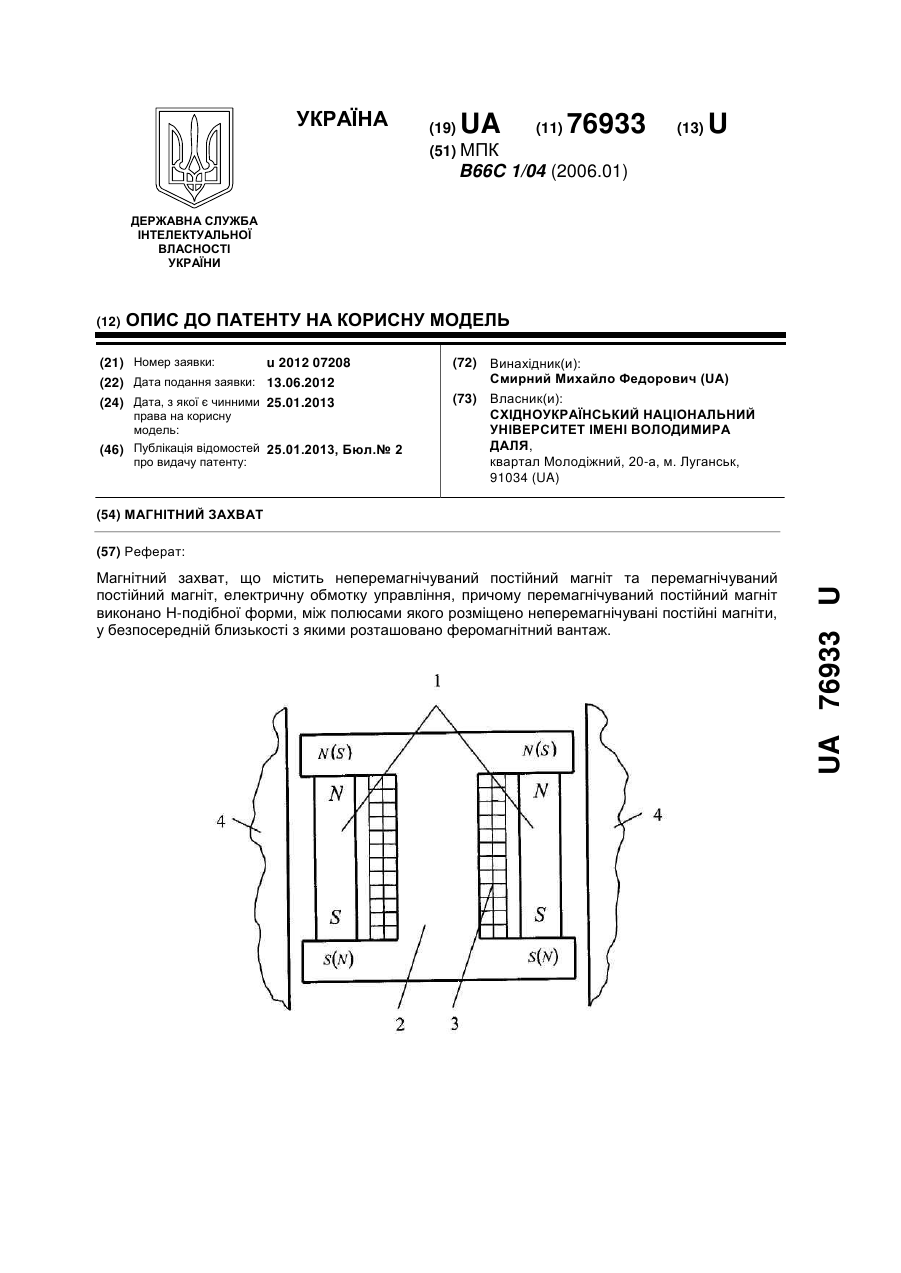
Номер патенту: 76933
Опубліковано: 25.01.2013
Автор: Смірний Михайло Федорович
МПК: B66C 1/04
Формула / Реферат:
Магнітний захват, що містить неперемагнічуваний постійний магніт та перемагнічуваний постійний магніт, електричну обмотку управління, який відрізняється тим, що перемагнічуваний постійний магніт виконано Н-подібної форми, між полюсами якого розміщено неперемагнічувані постійні магніти, у безпосередній близькості з якими розташовано феромагнітний вантаж.
Попередній патент: Спосіб протезування нижньої щелепи з відсутністю зубів
Наступний патент: Пристрій для визначення механічних напружень у феромагнітних конструкціях
Випадковий патент: Система, що сприяє адгезії, для гумових виробів