Тривісний візок залізничної транспортної одиниці
Номер патенту: 81895
Опубліковано: 10.07.2013
Автори: Голубенко Олександр Леонідович, Спірягін Валентин Ігоревич, Спірягін Максим Ігорович, Горбунов Микола Іванович, Зубарь Євгенія Валеріївна, Клюєв Олександр Семенович, Клюєв Сергій Олександрович, Костенко Ірина Вячеславівна

Формула / Реферат
Тривісний візок залізничної транспортної одиниці, що містить раму з боковинами із закріпленими на ній поперечними та подовжніми гідроциліндрами, які з'єднано з трубопроводом через дросель і які діють через повідки буксових вузлів на колісно-моторний блок, який відрізняється тим, що гідроциліндри розташовано під кутом до подовжньої осі симетрії візка та симетрично відносно поперечної осі симетрії візка з обох боків на крайніх колісних парах, у візку розміщено мікропроцесорну систему керування, що містить мікрофони, блок розподілення тиску рідини між гідроциліндрами, датчики поперечного переміщення колеса відносно рейки, датчик повороту візка відносно кузова, дросель, пневмоциліндр, гідроциліндр, пневмопідсилювач, а також GPS-приймач.
Текст
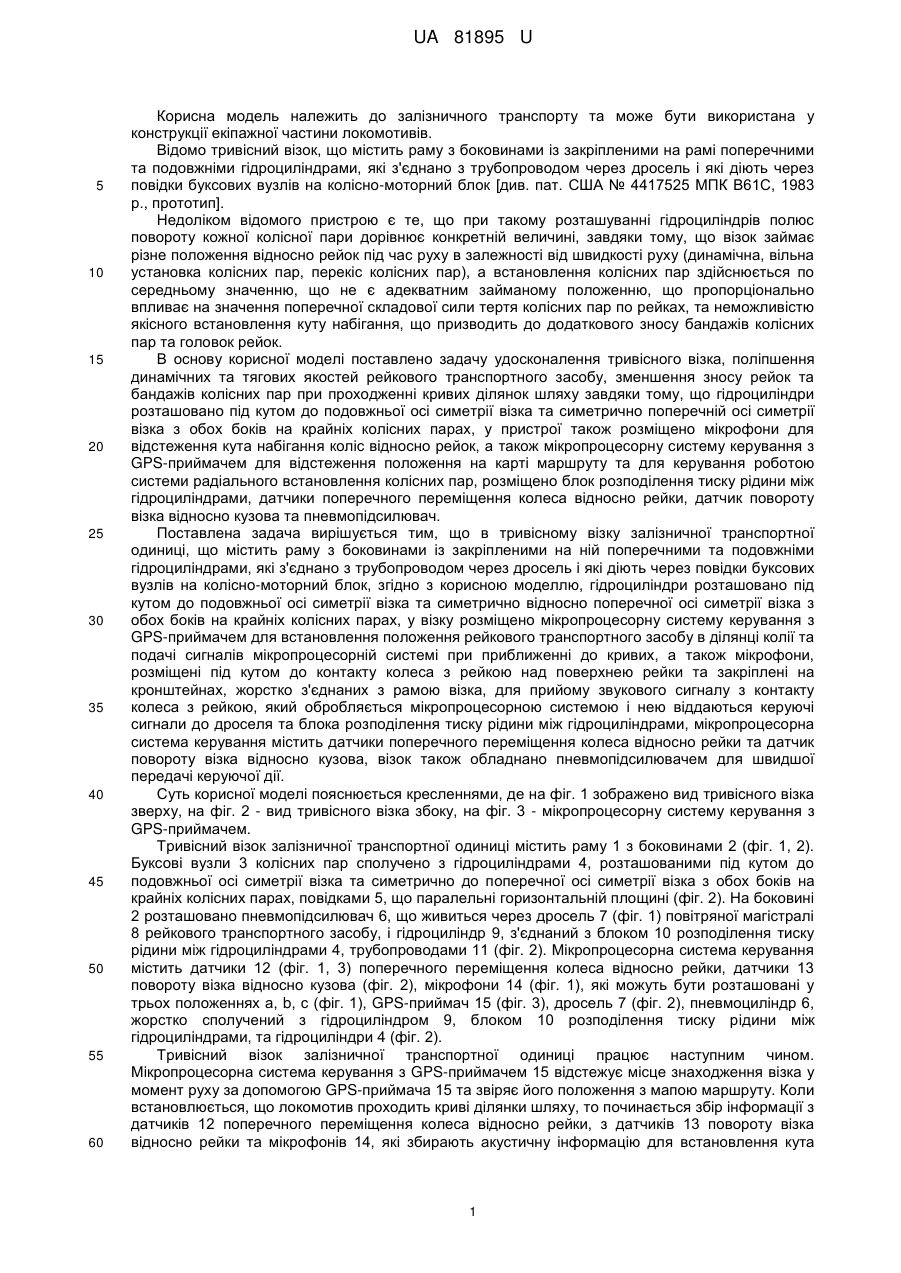
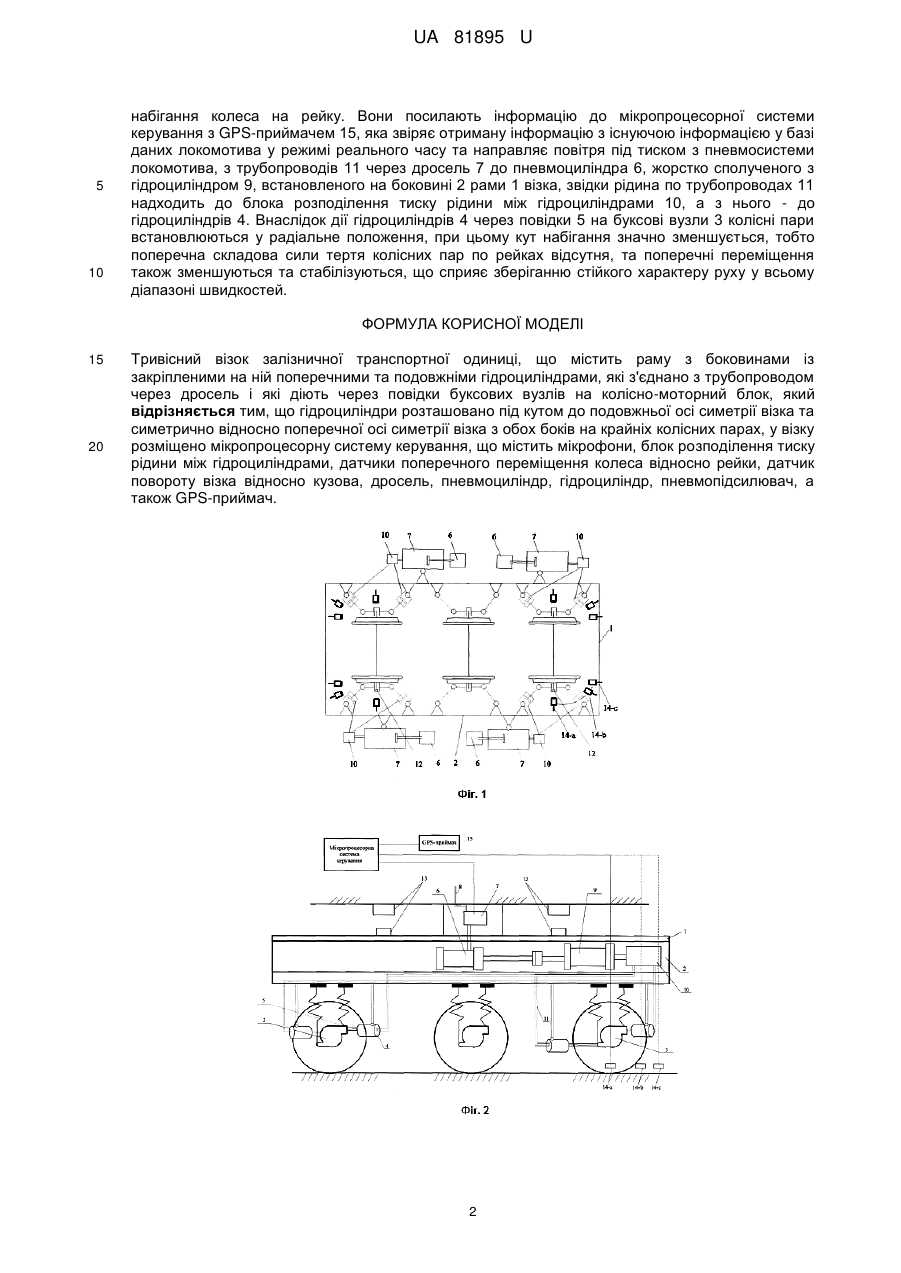
Реферат: Тривісний візок залізничної транспортної одиниці містить раму з боковинами із закріпленими на ній поперечними та подовжніми гідроциліндрами, які з'єднано з трубопроводом через дросель і які діють через повідки буксових вузлів на колісно-моторний блок. Гідроциліндри розташовано під кутом до подовжньої осі симетрії візка та симетрично відносно поперечної осі симетрії візка з обох боків на крайніх колісних парах. У візку розміщено мікропроцесорну систему керування, що містить мікрофони, блок розподілення тиску рідини між гідроциліндрами, датчики поперечного переміщення колеса відносно рейки, датчик повороту візка відносно кузова, дросель, пневмоциліндр, гідроциліндр, пневмопідсилювач, а також GPS-приймач. UA 81895 U (12) UA 81895 U UA 81895 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до залізничного транспорту та може бути використана у конструкції екіпажної частини локомотивів. Відомо тривісний візок, що містить раму з боковинами із закріпленими на рамі поперечними та подовжніми гідроциліндрами, які з'єднано з трубопроводом через дросель і які діють через повідки буксових вузлів на колісно-моторний блок [див. пат. США № 4417525 МПК В61С, 1983 р., прототип]. Недоліком відомого пристрою є те, що при такому розташуванні гідроциліндрів полюс повороту кожної колісної пари дорівнює конкретній величині, завдяки тому, що візок займає різне положення відносно рейок під час руху в залежності від швидкості руху (динамічна, вільна установка колісних пар, перекіс колісних пар), а встановлення колісних пар здійснюється по середньому значенню, що не є адекватним займаному положенню, що пропорціонально впливає на значення поперечної складової сили тертя колісних пар по рейках, та неможливістю якісного встановлення куту набігання, що призводить до додаткового зносу бандажів колісних пар та головок рейок. В основу корисної моделі поставлено задачу удосконалення тривісного візка, поліпшення динамічних та тягових якостей рейкового транспортного засобу, зменшення зносу рейок та бандажів колісних пар при проходженні кривих ділянок шляху завдяки тому, що гідроциліндри розташовано під кутом до подовжньої осі симетрії візка та симетрично поперечній осі симетрії візка з обох боків на крайніх колісних парах, у пристрої також розміщено мікрофони для відстеження кута набігання коліс відносно рейок, а також мікропроцесорну систему керування з GPS-приймачем для відстеження положення на карті маршруту та для керування роботою системи радіального встановлення колісних пар, розміщено блок розподілення тиску рідини між гідроциліндрами, датчики поперечного переміщення колеса відносно рейки, датчик повороту візка відносно кузова та пневмопідсилювач. Поставлена задача вирішується тим, що в тривісному візку залізничної транспортної одиниці, що містить раму з боковинами із закріпленими на ній поперечними та подовжніми гідроциліндрами, які з'єднано з трубопроводом через дросель і які діють через повідки буксових вузлів на колісно-моторний блок, згідно з корисною моделлю, гідроциліндри розташовано під кутом до подовжньої осі симетрії візка та симетрично відносно поперечної осі симетрії візка з обох боків на крайніх колісних парах, у візку розміщено мікропроцесорну систему керування з GPS-приймачем для встановлення положення рейкового транспортного засобу в ділянці колії та подачі сигналів мікропроцесорній системі при приближенні до кривих, а також мікрофони, розміщені під кутом до контакту колеса з рейкою над поверхнею рейки та закріплені на кронштейнах, жорстко з'єднаних з рамою візка, для прийому звукового сигналу з контакту колеса з рейкою, який обробляється мікропроцесорною системою і нею віддаються керуючі сигнали до дроселя та блока розподілення тиску рідини між гідроциліндрами, мікропроцесорна система керування містить датчики поперечного переміщення колеса відносно рейки та датчик повороту візка відносно кузова, візок також обладнано пневмопідсилювачем для швидшої передачі керуючої дії. Суть корисної моделі пояснюється кресленнями, де на фіг. 1 зображено вид тривісного візка зверху, на фіг. 2 - вид тривісного візка збоку, на фіг. 3 - мікропроцесорну систему керування з GPS-приймачем. Тривісний візок залізничної транспортної одиниці містить раму 1 з боковинами 2 (фіг. 1, 2). Буксові вузли 3 колісних пар сполучено з гідроциліндрами 4, розташованими під кутом до подовжньої осі симетрії візка та симетрично до поперечної осі симетрії візка з обох боків на крайніх колісних парах, повідками 5, що паралельні горизонтальній площині (фіг. 2). На боковині 2 розташовано пневмопідсилювач 6, що живиться через дросель 7 (фіг. 1) повітряної магістралі 8 рейкового транспортного засобу, і гідроциліндр 9, з'єднаний з блоком 10 розподілення тиску рідини між гідроциліндрами 4, трубопроводами 11 (фіг. 2). Мікропроцесорна система керування містить датчики 12 (фіг. 1, 3) поперечного переміщення колеса відносно рейки, датчики 13 повороту візка відносно кузова (фіг. 2), мікрофони 14 (фіг. 1), які можуть бути розташовані у трьох положеннях а, b, с (фіг. 1), GPS-приймач 15 (фіг. 3), дросель 7 (фіг. 2), пневмоциліндр 6, жорстко сполучений з гідроциліндром 9, блоком 10 розподілення тиску рідини між гідроциліндрами, та гідроциліндри 4 (фіг. 2). Тривісний візок залізничної транспортної одиниці працює наступним чином. Мікропроцесорна система керування з GPS-приймачем 15 відстежує місце знаходження візка у момент руху за допомогою GPS-приймача 15 та звіряє його положення з мапою маршруту. Коли встановлюється, що локомотив проходить криві ділянки шляху, то починається збір інформації з датчиків 12 поперечного переміщення колеса відносно рейки, з датчиків 13 повороту візка відносно рейки та мікрофонів 14, які збирають акустичну інформацію для встановлення кута 1 UA 81895 U 5 10 набігання колеса на рейку. Вони посилають інформацію до мікропроцесорної системи керування з GPS-приймачем 15, яка звіряє отриману інформацію з існуючою інформацією у базі даних локомотива у режимі реального часу та направляє повітря під тиском з пневмосистеми локомотива, з трубопроводів 11 через дросель 7 до пневмоциліндра 6, жорстко сполученого з гідроциліндром 9, встановленого на боковині 2 рами 1 візка, звідки рідина по трубопроводах 11 надходить до блока розподілення тиску рідини між гідроциліндрами 10, а з нього - до гідроциліндрів 4. Внаслідок дії гідроциліндрів 4 через повідки 5 на буксові вузли 3 колісні пари встановлюються у радіальне положення, при цьому кут набігання значно зменшується, тобто поперечна складова сили тертя колісних пар по рейках відсутня, та поперечні переміщення також зменшуються та стабілізуються, що сприяє зберіганню стійкого характеру руху у всьому діапазоні швидкостей. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Тривісний візок залізничної транспортної одиниці, що містить раму з боковинами із закріпленими на ній поперечними та подовжніми гідроциліндрами, які з'єднано з трубопроводом через дросель і які діють через повідки буксових вузлів на колісно-моторний блок, який відрізняється тим, що гідроциліндри розташовано під кутом до подовжньої осі симетрії візка та симетрично відносно поперечної осі симетрії візка з обох боків на крайніх колісних парах, у візку розміщено мікропроцесорну систему керування, що містить мікрофони, блок розподілення тиску рідини між гідроциліндрами, датчики поперечного переміщення колеса відносно рейки, датчик повороту візка відносно кузова, дросель, пневмоциліндр, гідроциліндр, пневмопідсилювач, а також GPS-приймач. 2 UA 81895 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюTri-axle bogie of railway vehicle
Автори англійськоюHolubenko Oleksandr Leonidovych, Horbunov Mykola Ivanovych, Spiriahin Maksym Ihorovych, Spiriahin Valentyn Ihorovych, Kostenko Iryna Viacheslavivna, Kliuiev Oleksandr Semenovych, Kliuiev Serhii Oleksandrovych, Zubar Yevhenia Valeriivna
Назва патенту російськоюТрехосная тележка железнодорожной единицы
Автори російськоюГолубенко Александр Леонидович, Горбунов Николай Иванович, Спирягин Максим Игоревич, Спирягин Валентин Игоревич, Костенко Ирина Вячеславовна, Клюев Александр Семенович, Клюев Сергей Александрович, Зубарь Евгения Валерьевна
МПК / Мітки
МПК: B61F 5/38
Мітки: тривісний, одиниці, залізничної, візок, транспортної
Код посилання
<a href="https://ua.patents.su/5-81895-trivisnijj-vizok-zaliznichno-transportno-odinici.html" target="_blank" rel="follow" title="База патентів України">Тривісний візок залізничної транспортної одиниці</a>
Тривісний візок залізничної транспортної одиниці
Номер патенту: 79086
Опубліковано: 10.04.2013
Автори: Клюєв Сергій Олександрович, Костенко Ірина Вячеславівна, Голубенко Олександр Леонідович, Ульшин Віталій Олександрович, Спірягін Валентин Ігоревич, Клюєв Олександр Семенович, Спірягін Максим Ігорович
МПК: B61F 5/38
Мітки: одиниці, залізничної, тривісний, транспортної, візок
Формула / Реферат:
Тривісний візок залізничної транспортної одиниці, що містить раму з боковинами, із закріпленим на ній гідроциліндрами, які з'єднано з трубопроводом через дросель і які діють через повідки буксових вузлів на колісно-моторний блок, який відрізняється тим, що гідроциліндри розташовано під кутом до подовжньої осі симетрії візка та симетрично відносно поперечної осі симетрії візка, у візку розміщено мікропроцесорну систему керування з GPS, що...
Тривісний візок залізничної транспортної одиниці
Номер патенту: 62900
Опубліковано: 15.12.2003
Автори: Спірягін Максим Ігоревич, Горбунов Микола Іванович, Лапін Дмитро Іванович, Спірягін Валентин Ігоревич
МПК: B61F 5/38
Мітки: одиниці, залізничної, візок, тривісний, транспортної
Формула / Реферат:
Тривісний візок залізничної транспортної одиниці, що містить раму, пневмопідсилювач, складений з жорстко з’єднаних пневмо-, та гідроциліндрів, а також керувальних гідроциліндрів, що діють на поводки буксів, який відрізняється тим, що керувальні гідроциліндри, що встановлені на рівні букс, розташовано під кутом до поздовжньої осі симетрії візка та несиметрічно відносно поперечної осі симетрії візка.
Двовісний візок залізничної транспортної одиниці
Номер патенту: 31817
Опубліковано: 25.04.2008
Автори: Клюєв Сергій Олександрович, Спірягін Максим Ігорович, Спірягін Валентин Ігорович, Костенко Ірина Вячеславівна
МПК: B61F 5/00
Мітки: двовісний, візок, залізничної, транспортної, одиниці
Формула / Реферат:
Двовісний візок залізничної транспортної одиниці, що містить раму з боковинами із закріпленим на ній пневмопідсилювачем, складеним з жорстко з'єднаних пневмо- та гідроциліндрів, а також керувальних гідроциліндрів, які діють на поводки буксових вузлів, керування роботою яких здійснюється мікропроцесорною системою керування, по сигналах датчиків повороту візка відносно кузова, датчиків поперечного переміщення колеса відносно рейки, який...
Тривісний візок залізничного транспортного засобу
Номер патенту: 38097
Опубліковано: 15.05.2001
Автори: Горбунов Микола Іванович, Лучанінов Олексій Володимирович, Спірягін Валентин Ігорович, Спірягін Максим Ігорович
МПК: B61F 5/26
Мітки: залізничного, транспортного, візок, засобу, тривісний
Формула / Реферат:
Тривісний візок залізничного транспортного засобу, що містить раму, зв'язану з буксами колісних пар подовжніми поводками, причому поводки крайніх колісних пар встановлені похило у вертикальній площині під кутом до подовжньої осі візка, а їх подовжні осі симетрії перетнуті і у точці проекції центру мас візка на горизонтальну площину, яка проходить крізь головки рейок, який відрізняється тим, що всередині крайніх кронштейнів встановлено...
Тривісний візок залізничного транспортного засобу
Номер патенту: 41183
Опубліковано: 12.05.2009
Автори: Михайлов Євген Валентинович, Ноженко Олена Сергіївна, Кравченко Катерина Олександрівна, Горбунов Микола Іванович, Попов Сергій Валерійович, Фесенко Антон Ігорович
Мітки: засобу, залізничного, тривісний, транспортного, візок
Формула / Реферат:
Тривісний візок залізничного транспортного засобу, що містить раму з боковинами та кронштейнами, поздовжні пружні повідки, що зв'язують кронштейни з буксами колісних пар, повідки крайніх колісних пар розташовані таким чином, що їх поздовжні осі симетрії перетинаються у проекції центру мас візка, який відрізняється тим, що повідки кожної колісної пари в горизонтальній площині встановлено похило до повздовжньої осі візка, кут, який утворюють...
Попередній патент: Торцевий асинхронний двигун з вільним ротором
Наступний патент: Магнітний захват
Випадковий патент: Масообмінний контактний пристрій