Механізм паралельного позиціонування, зокрема, для обробки або маніпулювання або вимірювання
Номер патенту: 81898
Опубліковано: 25.02.2008
Автори: Баума Вацлав, Петру Франтішек, Вампола Томас, Валасек Міхаель, Сіка Збінек
Формула / Реферат
1. Механізм паралельного позиціонування, зокрема, для обробки або маніпулювання, або вимірювання, що складається з платформи (3) для транспортування і/або маніпулювання, наприклад, інструментом або заготовкою, або вимірювальним пристроєм, з'єднаної зі станиною (2) верстата щонайменше одним позиціонуючим важелем (6) і шарнірно з'єднаної з щонайменше двома напрямними (4) ковзання за допомогою щонайменше трьох шарнірів (11), що обертаються, при цьому кожний позиціонуючий важіль (6) забезпечений одним шарніром (11), що обертається, для з'єднання з платформою (3) і одним шарніром (11), що обертається, для з'єднання з напрямною (4) ковзання, який відрізняється тим, що напрямні (4) ковзання розташовані на протилежних сторонах платформи (3) і взаємно перетинаються.
2. Механізм паралельного позиціонування за п. 1, який відрізняється тим, що платформа (3) з'єднана зі станиною (2) верстата за допомогою щонайменше одного позиціонуючого важеля (6) і за допомогою прямого з'єднання через шарнір (11), що обертається, і іншу напрямну (4) ковзання.
3. Механізм паралельного позиціонування за п. 1, який відрізняється тим, що платформа (3) шарнірно з'єднана зі станиною (2) верстата за допомогою чотирьох позиціонуючих важелів (6) через щонайменше дві напрямні (4) ковзання.
4. Механізм паралельного позиціонування за п. 3, який відрізняється тим, що платформа (3) шарнірно з'єднана зі станиною (2) верстата за допомогою чотирьох позиціонуючих важелів (6) через чотири напрямні (4) ковзання.
5. Механізм паралельного позиціонування за одним з пп. 1-4, який відрізняється тим, що проекції осей обертання шарнірів (11) платформи (3), що обертаються, на перпендикулярну їм площину утворюють трапецію.
6. Механізм паралельного позиціонування за одним з пп. 1-5, який відрізняється тим, що платформа (3) з'єднана з напрямною (4) ковзання за допомогою кареток (5), що позиціонуються, кінематично з'єднаних з привідними двигунами (10) за допомогою кулькових гвинтів (12) з гайками.
7. Механізм паралельного позиціонування за одним з пп. 1-5, який відрізняється тим, що платформа (3) з'єднана з напрямною (4) ковзання за допомогою кареток (5), що позиціонуються, з'єднаних з лінійним приводом.
8. Механізм паралельного позиціонування за одним з пп. 1-7, який відрізняється тим, що платформа (3) забезпечена патроном (7), здатним здійснювати поступальне переміщення.
9. Механізм паралельного позиціонування за одним з пп. 1-8, який відрізняється тим, що верстат має основу (1), причому основа (1) верстата встановлена з можливістю ковзання відносно люнета.
10. Механізм паралельного позиціонування за одним з пп. 1-9, який відрізняється тим, що напрямні (4) ковзання розташовані в станині (2) верстата, яка має можливість переміщення відносно основи (1) верстата.
Текст
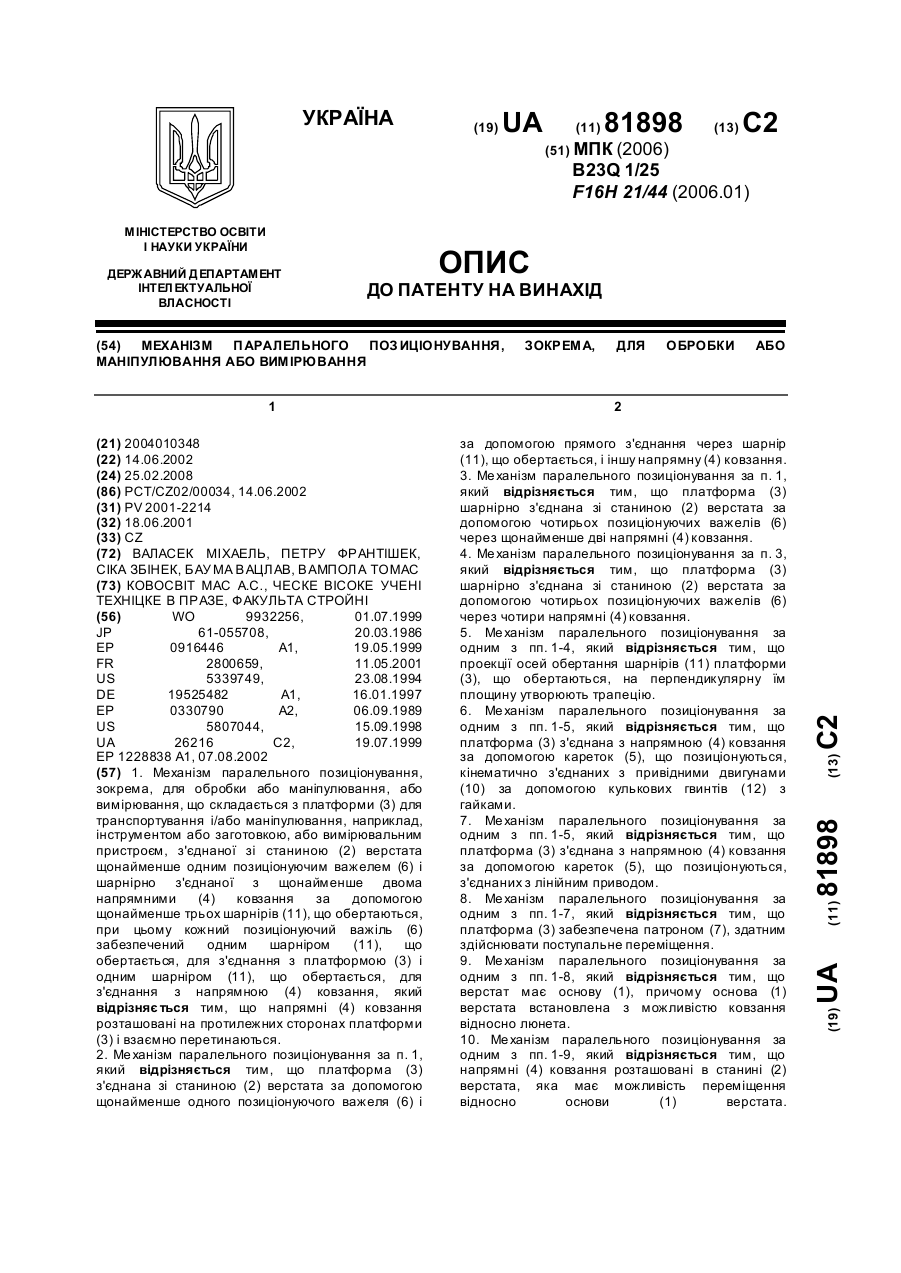
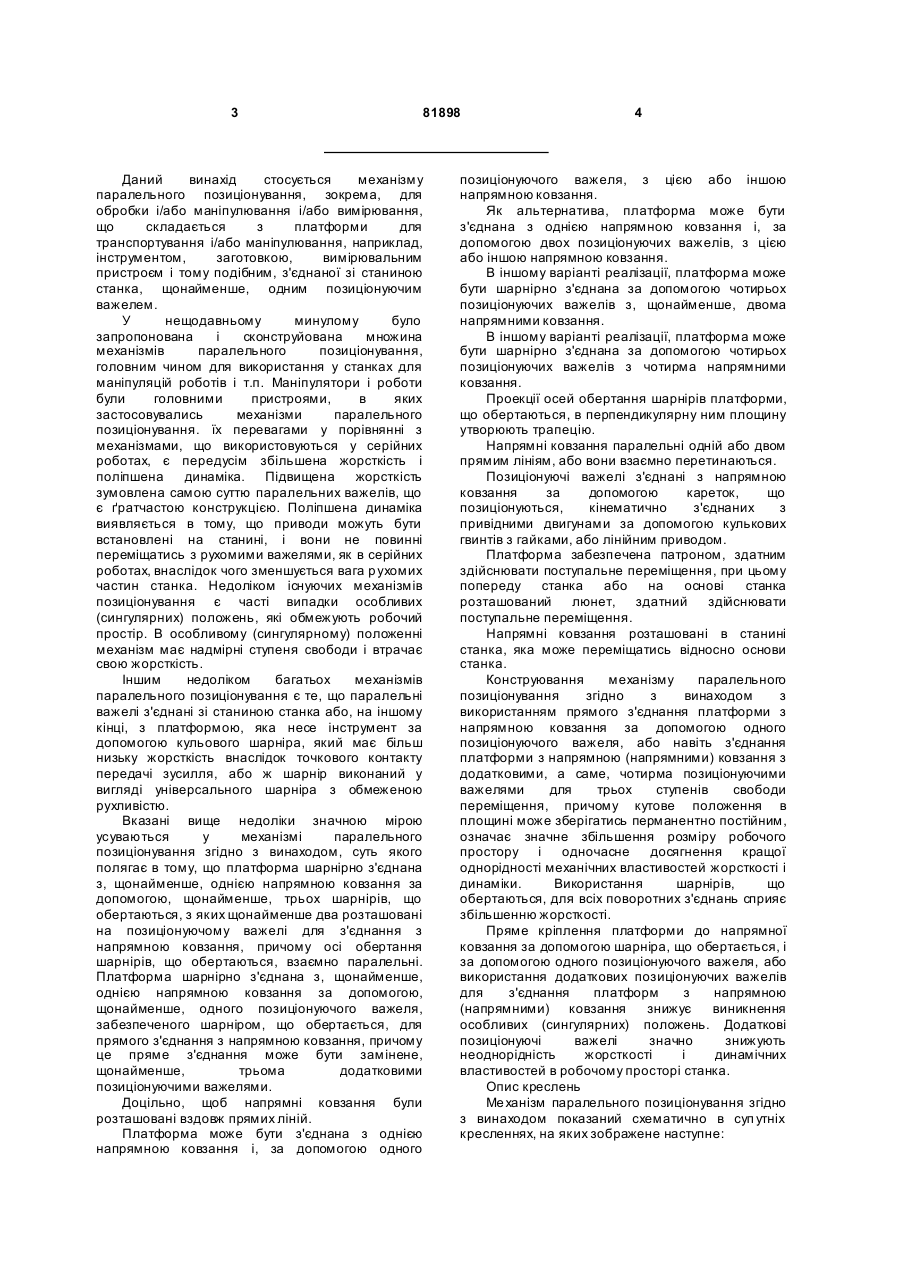
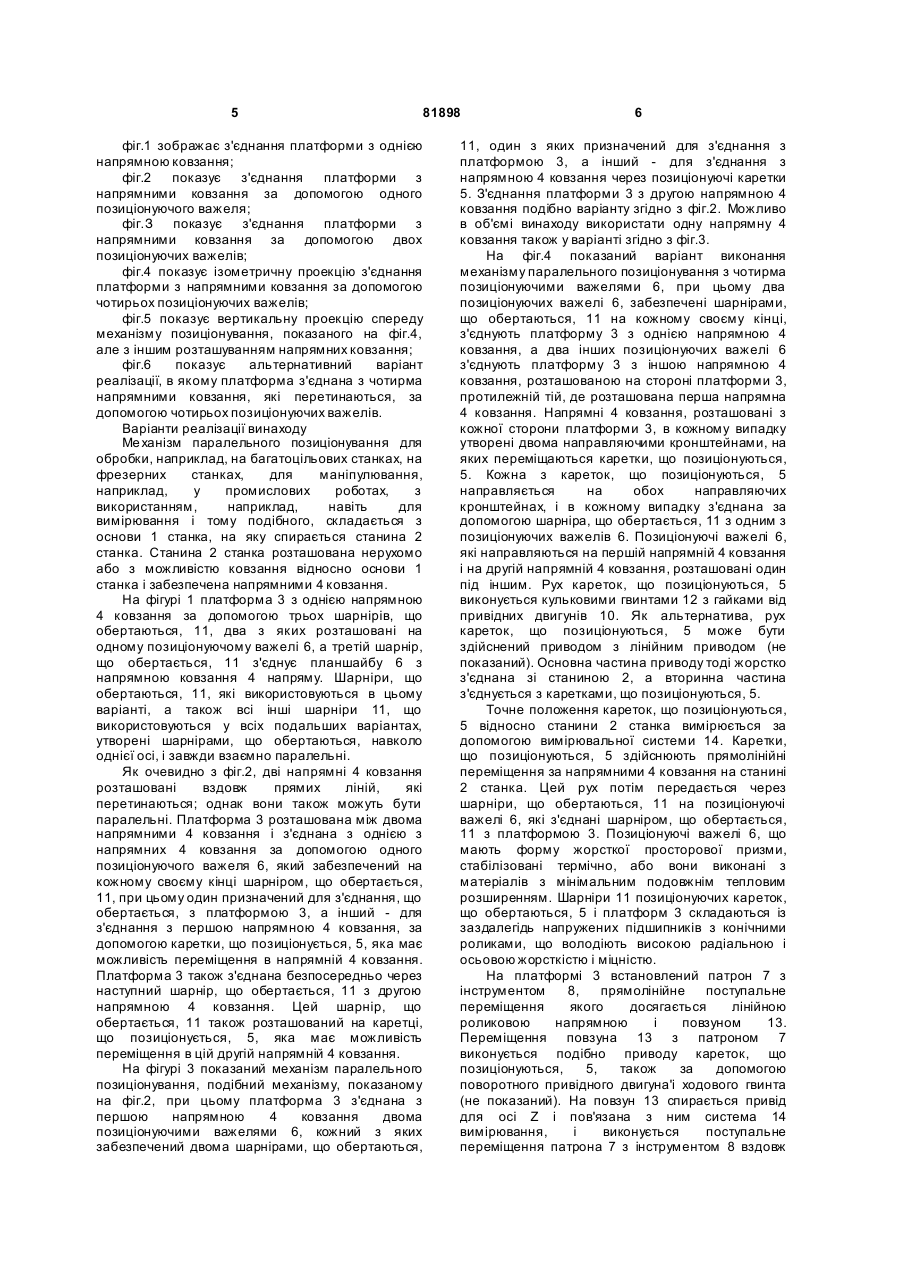
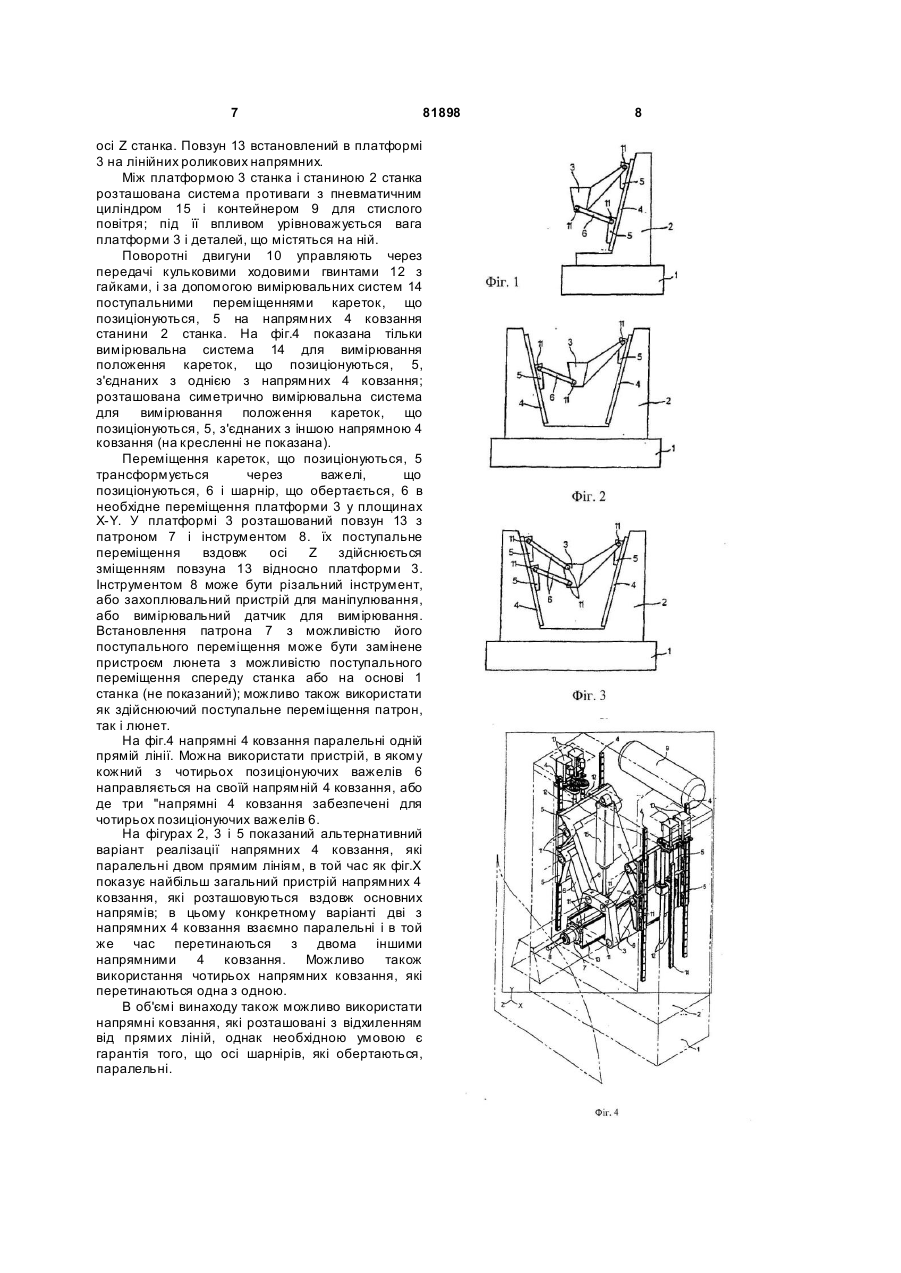
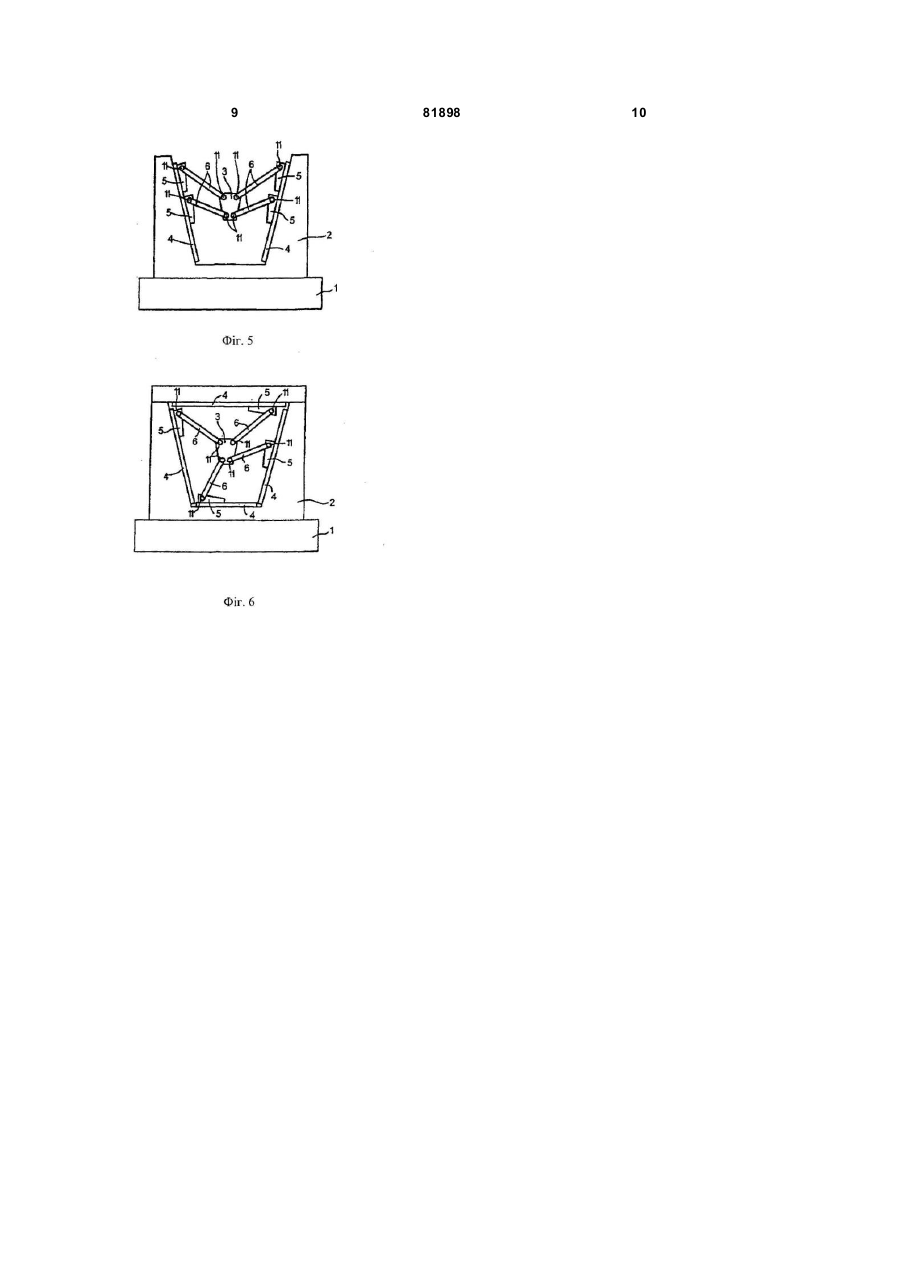
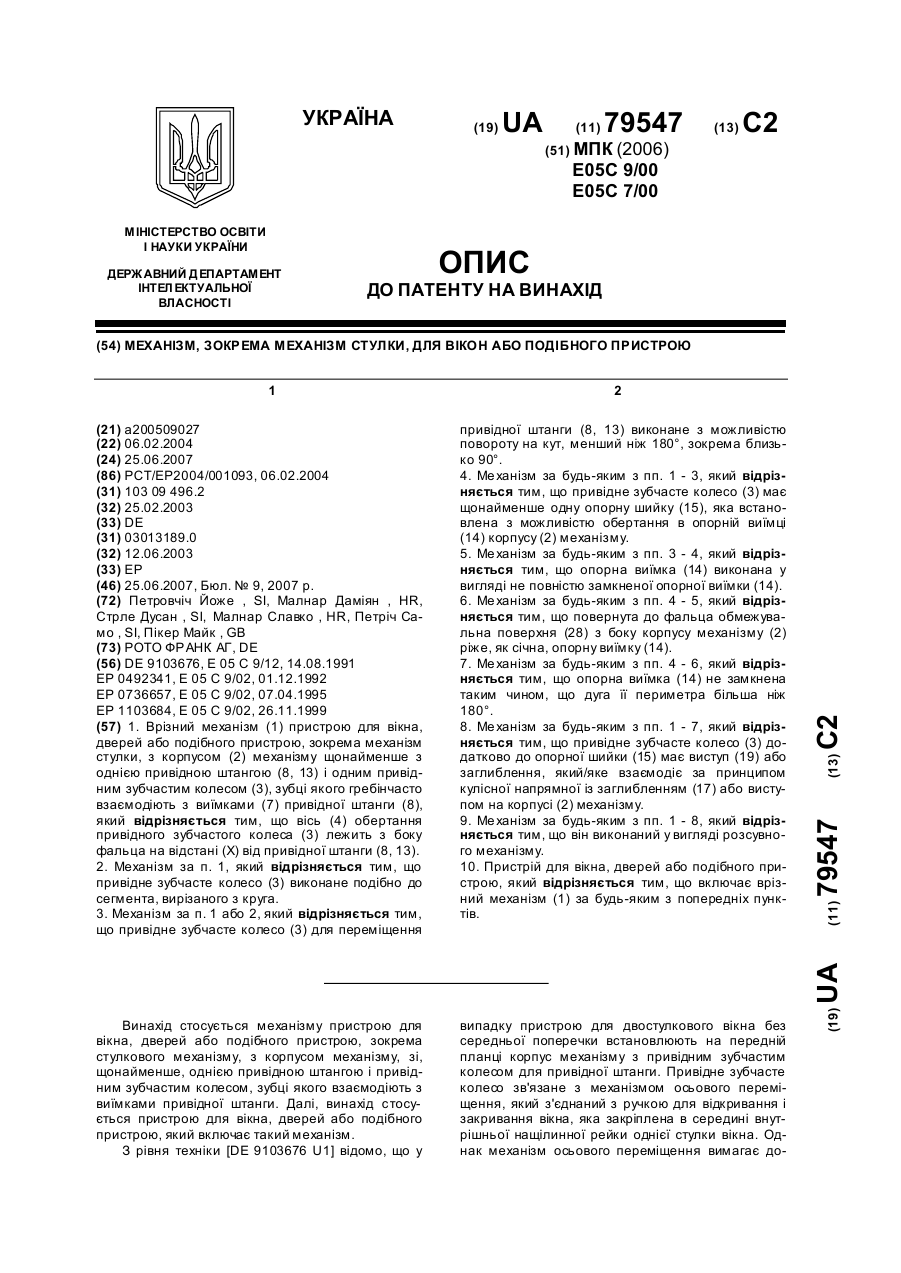
1. Механізм паралельного позиціонування, зокрема, для обробки або маніпулювання, або вимірювання, що складається з платформи (3) для транспортування і/або маніпулювання, наприклад, інструментом або заготовкою, або вимірювальним пристроєм, з'єднаної зі станиною (2) верстата щонайменше одним позиціонуючим важелем (6) і шарнірно з'єднаної з щонайменше двома напрямними (4) ковзання за допомогою щонайменше трьох шарнірів (11), що обертаються, при цьому кожний позиціонуючий важіль (6) забезпечений одним шарніром (11), що обертається, для з'єднання з платформою (3) і одним шарніром (11), що обертається, для з'єднання з напрямною (4) ковзання, який відрізняє ться тим, що напрямні (4) ковзання розташовані на протилежних сторонах платформи (3) і взаємно перетинаються. 2. Ме ханізм паралельного позиціонування за п. 1, який відрізняється тим, що платформа (3) з'єднана зі станиною (2) верстата за допомогою щонайменше одного позиціонуючого важеля (6) і ДЛЯ UA 1 ЗОКРЕМА, (19) ДЕРЖАВНИЙ Д ЕПАРТАМЕНТ ІНТЕЛ ЕКТУАЛЬНОЇ ВЛАСНОСТІ 3 81898 Даний винахід стосується механізму паралельного позиціонування, зокрема, для обробки і/або маніпулювання і/або вимірювання, що складається з платформи для транспортування і/або маніпулювання, наприклад, інструментом, заготовкою, вимірювальним пристроєм і тому подібним, з'єднаної зі станиною станка, щонайменше, одним позиціонуючим важелем. У нещодавньому минулому було запропонована і сконструйована множина механізмів паралельного позиціонування, головним чином для використання у станках для маніпуляцій роботів і т.п. Маніпулятори і роботи були головними пристроями, в яких застосовувались механізми паралельного позиціонування. їх перевагами у порівнянні з механізмами, що використовуються у серійних роботах, є передусім збільшена жорсткість і поліпшена динаміка. Підвищена жорсткість зумовлена самою суттю паралельних важелів, що є ґратчастою конструкцією. Поліпшена динаміка виявляється в тому, що приводи можуть бути встановлені на станині, і вони не повинні переміщатись з рухомими важелями, як в серійних роботах, внаслідок чого зменшується вага р ухомих частин станка. Недоліком існуючих механізмів позиціонування є часті випадки особливих (сингулярних) положень, які обмежують робочий простір. В особливому (сингулярному) положенні механізм має надмірні ступеня свободи і втрачає свою жорсткість. Іншим недоліком багатьох механізмів паралельного позиціонування є те, що паралельні важелі з'єднані зі станиною станка або, на іншому кінці, з платформою, яка несе інструмент за допомогою кульового шарніра, який має більш низьку жорсткість внаслідок точкового контакту передачі зусилля, або ж шарнір виконаний у вигляді універсального шарніра з обмеженою рухливістю. Вказані вище недоліки значною мірою усуваються у механізмі паралельного позиціонування згідно з винаходом, суть якого полягає в тому, що платформа шарнірно з'єднана з, щонайменше, однією напрямною ковзання за допомогою, щонайменше, трьох шарнірів, що обертаються, з яких щонайменше два розташовані на позиціонуючому важелі для з'єднання з напрямною ковзання, причому осі обертання шарнірів, що обертаються, взаємно паралельні. Платформа шарнірно з'єднана з, щонайменше, однією напрямною ковзання за допомогою, щонайменше, одного позиціонуючого важеля, забезпеченого шарніром, що обертається, для прямого з'єднання з напрямною ковзання, причому це пряме з'єднання може бути замінене, щонайменше, трьома додатковими позиціонуючими важелями. Доцільно, щоб напрямні ковзання були розташовані вздовж прямих ліній. Платформа може бути з'єднана з однією напрямною ковзання і, за допомогою одного 4 позиціонуючого важеля, з цією або іншою напрямною ковзання. Як альтернатива, платформа може бути з'єднана з однією напрямною ковзання і, за допомогою двох позиціонуючих важелів, з цією або іншою напрямною ковзання. В іншому варіанті реалізації, платформа може бути шарнірно з'єднана за допомогою чотирьох позиціонуючих важелів з, щонайменше, двома напрямними ковзання. В іншому варіанті реалізації, платформа може бути шарнірно з'єднана за допомогою чотирьох позиціонуючих важелів з чотирма напрямними ковзання. Проекції осей обертання шарнірів платформи, що обертаються, в перпендикулярну ним площину утворюють трапецію. Напрямні ковзання паралельні одній або двом прямим лініям, або вони взаємно перетинаються. Позиціонуючі важелі з'єднані з напрямною ковзання за допомогою кареток, що позиціонуються, кінематично з'єднаних з привідними двигунами за допомогою кулькових гвинтів з гайками, або лінійним приводом. Платформа забезпечена патроном, здатним здійснювати поступальне переміщення, при цьому попереду станка або на основі станка розташований люнет, здатний здійснювати поступальне переміщення. Напрямні ковзання розташовані в станині станка, яка може переміщатись відносно основи станка. Конструювання механізму паралельного позиціонування згідно з винаходом з використанням прямого з'єднання платформи з напрямною ковзання за допомогою одного позиціонуючого важеля, або навіть з'єднання платформи з напрямною (напрямними) ковзання з додатковими, а саме, чотирма позиціонуючими важелями для трьох ступенів свободи переміщення, причому кутове положення в площині може зберігатись перманентно постійним, означає значне збільшення розміру робочого простору і одночасне досягнення кращої однорідності механічних властивостей жорсткості і динаміки. Використання шарнірів, що обертаються, для всіх поворотних з'єднань сприяє збільшенню жорсткості. Пряме кріплення платформи до напрямної ковзання за допомогою шарніра, що обертається, і за допомогою одного позиціонуючого важеля, або використання додаткових позиціонуючих важелів для з'єднання платформ з напрямною (напрямними) ковзання знижує виникнення особливих (сингулярних) положень. Додаткові позиціонуючі важелі значно знижують неоднорідність жорсткості і динамічних властивостей в робочому просторі станка. Опис креслень Ме ханізм паралельного позиціонування згідно з винаходом показаний схематично в суп утніх кресленнях, на яких зображене наступне: 5 81898 фіг.1 зображає з'єднання платформи з однією напрямною ковзання; фіг.2 показує з'єднання платформи з напрямними ковзання за допомогою одного позиціонуючого важеля; фіг.З показує з'єднання платформи з напрямними ковзання за допомогою двох позиціонуючих важелів; фіг.4 показує ізометричну проекцію з'єднання платформи з напрямними ковзання за допомогою чотирьох позиціонуючих важелів; фіг.5 показує вертикальну проекцію спереду механізму позиціонування, показаного на фіг.4, але з іншим розташуванням напрямних ковзання; фіг.6 показує альтернативний варіант реалізації, в якому платформа з'єднана з чотирма напрямними ковзання, які перетинаються, за допомогою чотирьох позиціонуючих важелів. Варіанти реалізації винаходу Ме ханізм паралельного позиціонування для обробки, наприклад, на багатоцільових станках, на фрезерних станках, для маніпулювання, наприклад, у промислових роботах, з використанням, наприклад, навіть для вимірювання і тому подібного, складається з основи 1 станка, на яку спирається станина 2 станка. Станина 2 станка розташована нерухомо або з можливістю ковзання відносно основи 1 станка і забезпечена напрямними 4 ковзання. На фігурі 1 платформа 3 з однією напрямною 4 ковзання за допомогою трьох шарнірів, що обертаються, 11, два з яких розташовані на одному позиціонуючому важелі 6, а третій шарнір, що обертається, 11 з'єднує планшайбу 6 з напрямною ковзання 4 напряму. Шарніри, що обертаються, 11, які використовуються в цьому варіанті, а також всі інші шарніри 11, що використовуються у всіх подальших варіантах, утворені шарнірами, що обертаються, навколо однієї осі, і завжди взаємно паралельні. Як очевидно з фіг.2, дві напрямні 4 ковзання розташовані вздовж прямих ліній, які перетинаються; однак вони також можуть бути паралельні. Платформа 3 розташована між двома напрямними 4 ковзання і з'єднана з однією з напрямних 4 ковзання за допомогою одного позиціонуючого важеля 6, який забезпечений на кожному своєму кінці шарніром, що обертається, 11, при цьому один призначений для з'єднання, що обертається, з платформою 3, а інший - для з'єднання з першою напрямною 4 ковзання, за допомогою каретки, що позиціонується, 5, яка має можливість переміщення в напрямній 4 ковзання. Платформа 3 також з'єднана безпосередньо через наступний шарнір, що обертається, 11 з другою напрямною 4 ковзання. Цей шарнір, що обертається, 11 також розташований на каретці, що позиціонується, 5, яка має можливість переміщення в цій другій напрямній 4 ковзання. На фігурі 3 показаний механізм паралельного позиціонування, подібний механізму, показаному на фіг.2, при цьому платформа 3 з'єднана з першою напрямною 4 ковзання двома позиціонуючими важелями 6, кожний з яких забезпечений двома шарнірами, що обертаються, 6 11, один з яких призначений для з'єднання з платформою 3, а інший - для з'єднання з напрямною 4 ковзання через позиціонуючі каретки 5. З'єднання платформи 3 з другою напрямною 4 ковзання подібно варіанту згідно з фіг.2. Можливо в об'ємі винаходу використати одну напрямну 4 ковзання також у варіанті згідно з фіг.3. На фіг.4 показаний варіант виконання механізму паралельного позиціонування з чотирма позиціонуючими важелями 6, при цьому два позиціонуючих важелі 6, забезпечені шарнірами, що обертаються, 11 на кожному своєму кінці, з'єднують платформу 3 з однією напрямною 4 ковзання, а два інших позиціонуючих важелі 6 з'єднують платформу 3 з іншою напрямною 4 ковзання, розташованою на стороні платформи 3, протилежній тій, де розташована перша напрямна 4 ковзання. Напрямні 4 ковзання, розташовані з кожної сторони платформи 3, в кожному випадку утворені двома направляючими кронштейнами, на яких переміщаються каретки, що позиціонуються, 5. Кожна з кареток, що позиціонуються, 5 направляється на обох направляючих кронштейнах, і в кожному випадку з'єднана за допомогою шарніра, що обертається, 11 з одним з позиціонуючих важелів 6. Позиціонуючі важелі 6, які направляються на першій напрямній 4 ковзання і на другій напрямній 4 ковзання, розташовані один під іншим. Рух кареток, що позиціонуються, 5 виконується кульковими гвинтами 12 з гайками від привідних двигунів 10. Як альтернатива, рух кареток, що позиціонуються, 5 може бути здійснений приводом з лінійним приводом (не показаний). Основна частина приводу тоді жорстко з'єднана зі станиною 2, а вторинна частина з'єднується з каретками, що позиціонуються, 5. Точне положення кареток, що позиціонуються, 5 відносно станини 2 станка вимірюється за допомогою вимірювальної системи 14. Каретки, що позиціонуються, 5 здійснюють прямолінійні переміщення за напрямними 4 ковзання на станині 2 станка. Цей рух потім передається через шарніри, що обертаються, 11 на позиціонуючі важелі 6, які з'єднані шарніром, що обертається, 11 з платформою 3. Позиціонуючі важелі 6, що мають форму жорсткої просторової призми, стабілізовані термічно, або вони виконані з матеріалів з мінімальним подовжнім тепловим розширенням. Шарніри 11 позиціонуючих кареток, що обертаються, 5 і платформ 3 складаються із заздалегідь напружених підшипників з конічними роликами, що володіють високою радіальною і осьовою жорсткістю і міцністю. На платформі 3 встановлений патрон 7 з інструментом 8, прямолінійне поступальне переміщення якого досягається лінійною роликовою напрямною і повзуном 13. Переміщення повзуна 13 з патроном 7 виконується подібно приводу кареток, що позиціонуються, 5, також за допомогою поворотного привідного двигуна'і ходового гвинта (не показаний). На повзун 13 спирається привід для осі Ζ і пов'язана з ним система 14 вимірювання, і виконується поступальне переміщення патрона 7 з інструментом 8 вздовж 7 81898 осі Ζ станка. Повзун 13 встановлений в платформі 3 на лінійних роликових напрямних. Між платформою 3 станка і станиною 2 станка розташована система противаги з пневматичним циліндром 15 і контейнером 9 для стислого повітря; під її впливом урівноважується вага платформи 3 і деталей, що містяться на ній. Поворотні двигуни 10 управляють через передачі кульковими ходовими гвинтами 12 з гайками, і за допомогою вимірювальних систем 14 поступальними переміщеннями кареток, що позиціонуються, 5 на напрямних 4 ковзання станини 2 станка. На фіг.4 показана тільки вимірювальна система 14 для вимірювання положення кареток, що позиціонуються, 5, з'єднаних з однією з напрямних 4 ковзання; розташована симетрично вимірювальна система для вимірювання положення кареток, що позиціонуються, 5, з'єднаних з іншою напрямною 4 ковзання (на кресленні не показана). Переміщення кареток, що позиціонуються, 5 трансформується через важелі, що позиціонуються, 6 і шарнір, що обертається, 6 в необхідне переміщення платформи 3 у площинах Χ-Υ. У платформі 3 розташований повзун 13 з патроном 7 і інструментом 8. їх поступальне переміщення вздовж осі Ζ здійснюється зміщенням повзуна 13 відносно платформи 3. Інструментом 8 може бути різальний інструмент, або захоплювальний пристрій для маніпулювання, або вимірювальний датчик для вимірювання. Встановлення патрона 7 з можливістю його поступального переміщення може бути замінене пристроєм люнета з можливістю поступального переміщення спереду станка або на основі 1 станка (не показаний); можливо також використати як здійснюючий поступальне переміщення патрон, так і люнет. На фіг.4 напрямні 4 ковзання паралельні одній прямій лінії. Можна використати пристрій, в якому кожний з чотирьох позиціонуючих важелів 6 направляється на своїй напрямній 4 ковзання, або де три "напрямні 4 ковзання забезпечені для чотирьох позиціонуючих важелів 6. На фігурах 2, 3 і 5 показаний альтернативний варіант реалізації напрямних 4 ковзання, які паралельні двом прямим лініям, в той час як фіг.X показує найбільш загальний пристрій напрямних 4 ковзання, які розташовуються вздовж основних напрямів; в цьому конкретному варіанті дві з напрямних 4 ковзання взаємно паралельні і в той же час перетинаються з двома іншими напрямними 4 ковзання. Можливо також використання чотирьох напрямних ковзання, які перетинаються одна з одною. В об'ємі винаходу також можливо використати напрямні ковзання, які розташовані з відхиленням від прямих ліній, однак необхідною умовою є гарантія того, що осі шарнірів, які обертаються, паралельні. 8 9 81898 10
ДивитисяДодаткова інформація
Назва патенту англійськоюParallel positioning mechanism, especially for machining and/or manipulation and/or measuring
Автори англійськоюValasek Michael, Petru Frantisek, Sika Zbynek, Bauma Vaclav, Vampola Tomas
Назва патенту російськоюМеханизм параллельного позиционирования, в частности, для обработки или манипулирования или измерения
Автори російськоюВаласек Михаель, Петру Франтишек, Сика Збинек, Баума Вацлав, Вампола Томас
МПК / Мітки
МПК: B23Q 1/25, F16H 21/44
Мітки: вимірювання, зокрема, паралельного, механізм, обробки, позиціонування, маніпулювання
Код посилання
<a href="https://ua.patents.su/5-81898-mekhanizm-paralelnogo-pozicionuvannya-zokrema-dlya-obrobki-abo-manipulyuvannya-abo-vimiryuvannya.html" target="_blank" rel="follow" title="База патентів України">Механізм паралельного позиціонування, зокрема, для обробки або маніпулювання або вимірювання</a>
Механізм, зокрема механізм стулки, для вікон або подібного пристрою
Номер патенту: 79547
Опубліковано: 25.06.2007
Автори: Пікер Майк, Малнар Славко, Петріч Само, Малнар Даміян, Стрле Дусан, Петровчіч Йоже
Мітки: вікон, зокрема, подібного, механізм, стулки, пристрою
Формула / Реферат:
1. Врізний механізм (1) пристрою для вікна, дверей або подібного пристрою, зокрема механізм стулки, з корпусом (2) механізму щонайменше з однією привідною штангою (8, 13) і одним привідним зубчастим колесом (3), зубці якого гребінчасто взаємодіють з виїмками (7) привідної штанги (8), який відрізняється тим, що вісь (4) обертання привідного зубчастого колеса (3) лежить з боку фальца на відстані (X) від привідної штанги (8, 13).2....
Верстат для механічної обробки об’ємного виробу, зокрема елемента зубного протеза, за допомогою автоматичного копіювання
Номер патенту: 64016
Опубліковано: 16.02.2004
Автор: Фарре П'єр
МПК: A61C 13/00, B23Q 35/00
Мітки: механічної, автоматичного, елемента, виробу, зокрема, обробки, допомогою, зубного, об`ємного, копіювання, верстат, протеза
Формула / Реферат:
1. Верстат (1) для механічної обробки щонайменше одного об'ємного об'єкта, а саме елемента зубного протеза, за допомогою автоматичного копіювання, який містить щонайменше інструмент (4) для механічної обробки, що має вісь симетрії (18) і має щонайменше один степінь вільності обертання навколо осі симетрії, привідні засоби (5) для приведення в обертання вказаного інструмента (4) для механічної обробки навколо його осі симетрії, засоби (6)...
Контактна група для перемички паралельного з’єднувача, що використовується на кінцевій станції кабельної лінії, а також перемичка паралельного з’єднувача
Номер патенту: 72880
Опубліковано: 16.05.2005
Автор: Райхле Ханс
МПК: H01R 9/24, H01R 29/00, H01R 4/24
Мітки: група, контактна, з'єднувача, кабельної, лінії, використовується, перемичка, станції, також, кінцевий, перемички, паралельного
Формула / Реферат:
1. Перемичка паралельного з'єднувача, яка містить корпус (1), виконаний у вигляді нерознімного пластикового тіла з подовжньо розташованими на відстані одне від одного відкритими гніздами (2), при цьому в кожному з гнізд (2) встановлена одна контактна група (3), яка відрізняється тим, що перемичка є прохідною перемичкою, роз'єднуваною перемичкою або комутованою перемичкою, при цьому контактна група (3) містить два язички (4) з контактними...
Ємність для металургійної обробки доменного чавуну, розплаву сталі, зокрема конвертер
Номер патенту: 79653
Опубліковано: 10.07.2007
Автори: Лаубах Вінфрід, Шуберт Бернд
МПК: C21C 5/46
Мітки: ємність, чавуну, металургійної, зокрема, сталі, розплаву, обробки, конвертер, доменного
Формула / Реферат:
1. Ємність (1) для металургійної обробки доменного чавуну, розплаву сталі, яка обпирається на розташоване із зазором (2) опорне кільце (3), виконане з можливістю повороту за допомогою цапф у дві сторони, причому опорне кільце за допомогою захоплювачів (6) на верхньому поясі (3а) закріплено до стінки (1b) ємності, причому передбачена опора (4) на верхньому поясі (3а) опорного кільця (3), яка виконана рознімною за допомогою додаткових елементів...
Система позиціонування головок жорстких дисків
Номер патенту: 4812
Опубліковано: 15.02.2005
Автор: Гур'янов Андрій Петрович
МПК: G11B 5/012
Мітки: система, головок, жорстких, позиціонування, дисків
Формула / Реферат:
1. Система позиціонування головок жорстких дисків, що включає пристрій позиціонування, який містить головки читання/запису, та принаймні один магнітний диск з нанесеними доріжками і сервосистемою, що закріплений на шпинделі, яка відрізняється тим, що пристрій позиціонування виконаний у вигляді принаймні одної мікросхеми, до якої інтегровані головки читання/запису і контролер, головки читання/запису розміщені рядами, так що кількість головок...
Попередній патент: Спосіб і пристрій для перевантаження та контролю герметичності тепловидільного елемента реактора з рідким теплоносієм
Наступний патент: Настил підлоги
Випадковий патент: Речовина для контрастування та одержання зрізів анатомічних структур