Пружно-тензометричні платформені ваги
Номер патенту: 83142
Опубліковано: 27.08.2013
Автори: Санкін Анатолій Олексійович, Богдан Кім Степанович, Слажнєв Микола Андрійович
Формула / Реферат
Пружно-тензометричні платформені ваги, що містять вантажоприймальну пружно підвішену платформу, силопередавальний вузол, силовимірювальний елемент, вихід котрого через підсилювач підключений до мікропроцесорного блока вимірювання та індикації маси, і блок живлення, які відрізняються тим, що силопередавальний вузол виконаний у вигляді кільцевого постійного магніту і розташованих під ним з повітряним зазором у вертикальній площині трьох стрижневих постійних магнітів, робочі поверхні кільцевого і стрижневих магнітів однополярні, а силовимірювальний елемент складається з трьох силовимірювальних датчиків, розташованих під кутом 120° один від одного у горизонтальній площині і закріплених на нерухомій основі, причому кільцевий магніт закріплений в центрі симетрії платформи, кожний стрижневий магніт з'єднаний з силовим входом відповідного силовимірювального датчика, а електричні виходи цих датчиків через суматор і підсилювач підключені до мікропроцесорного блока вимірювання та індикації маси.
Текст
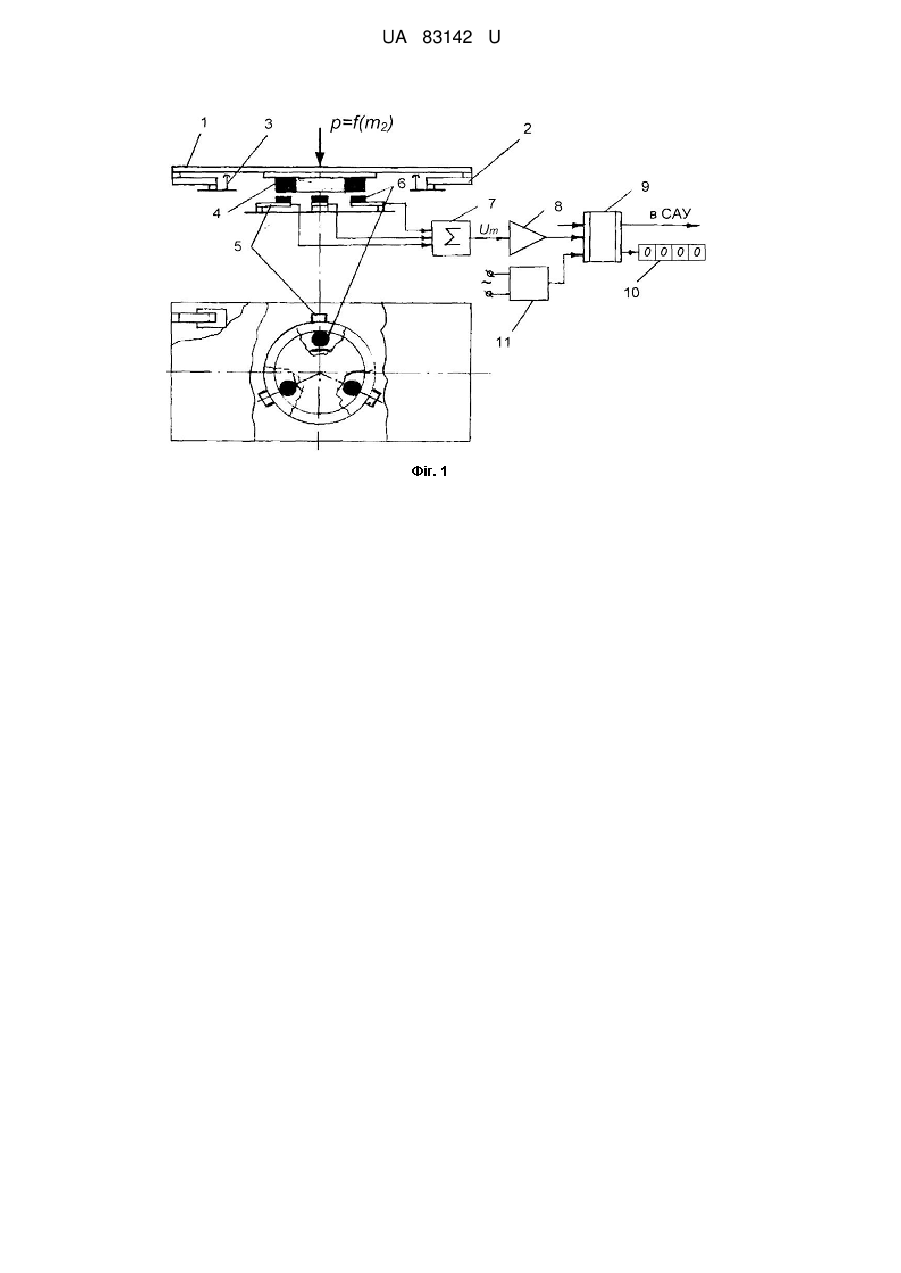
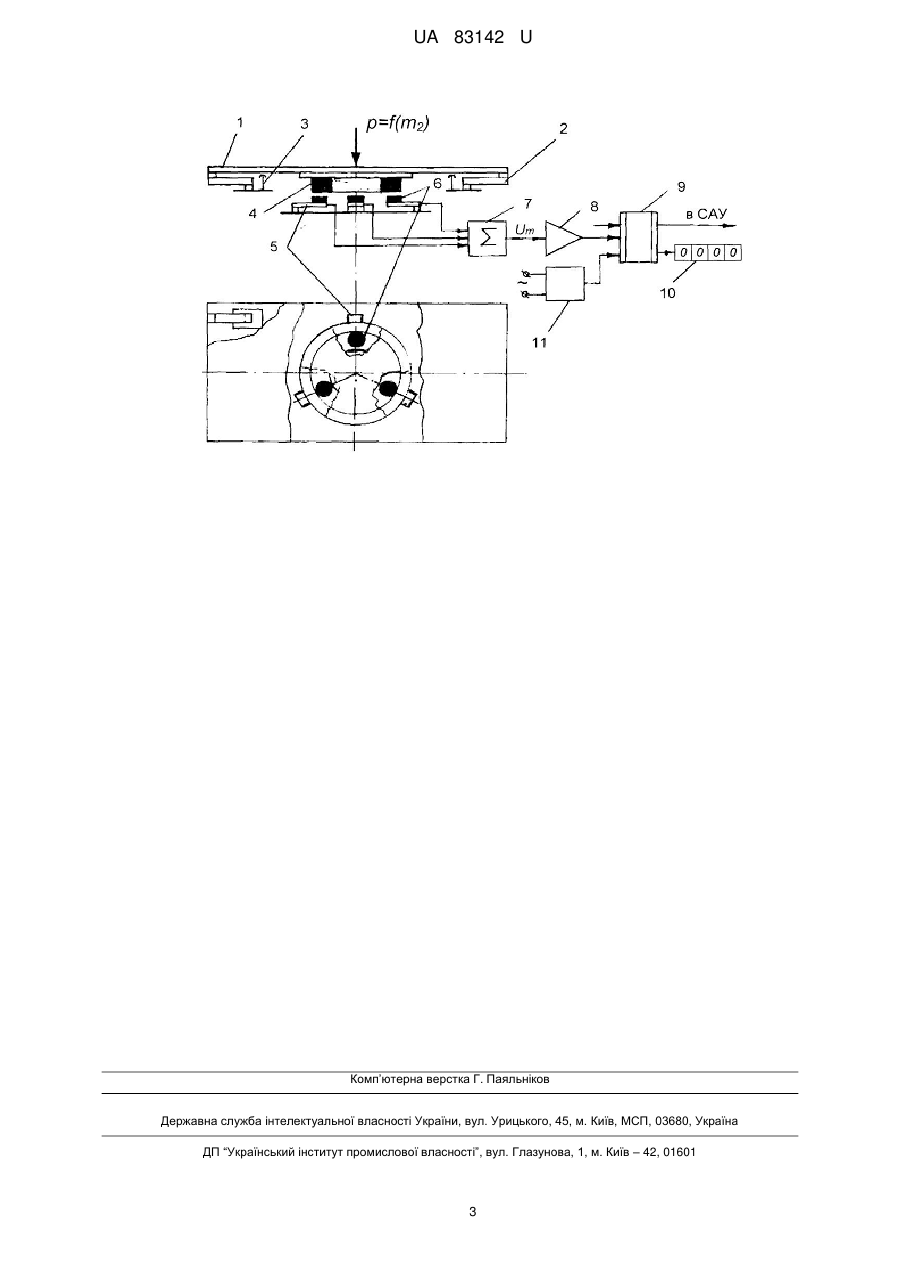
Реферат: Пружно-тензометричні платформені ваги містять вантажоприймальну пружно підвішену платформу, силопередавальний вузол, силовимірювальний елемент, вихід котрого через підсилювач підключений до мікропроцесорного блока вимірювання та індикації маси, і блок живлення. Силопередавальний вузол виконаний у вигляді кільцевого постійного магніту і розташованих під ним з повітряним зазором у вертикальній площині трьох стрижневих постійних магнітів, робочі поверхні кільцевого і стрижневих магнітів однополярні, а силовимірювальний елемент складається з трьох силовимірювальних датчиків, розташованих під кутом 120° один від одного у горизонтальній площині і закріплених на нерухомій основі. Кільцевий магніт закріплений в центрі симетрії платформи, кожний стрижневий магніт з'єднаний з силовим входом відповідного силовимірювального датчика. Електричні виходи цих датчиків через суматор і підсилювач підключені до мікропроцесорного блока вимірювання та індикації маси. UA 83142 U (54) ПРУЖНО-ТЕНЗОМЕТРИЧНІ ПЛАТФОРМЕНІ ВАГИ UA 83142 U UA 83142 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до ваговимірювальної техніки і може бути використана для вимірювання маси вантажів та дозування металевих розплавів і сипучих матеріалів у ливарному виробництві, металургії та інших галузях промисловості. Відомо пристрій для зважування [Патент 2026535 RU 6МПК G01G 19/00, опубл. 10.01.1995, Бюл. № 1], що містить: установлену на пружному підвісі вантажоприймальну платформу, центр жорсткості якої з'єднано з одним з кінців передавального елемента, з'єднаного другим кінцем з силовим входом силовимірювального датчика, підключеного до реєстратора, причому передавальний елемент виконано у вигляді гвинтової пружини, жорсткість якої принаймні на порядок менше жорсткості пружного підвісу платформи. Недоліки цього пристрою є залежність точності вимірювання маси від стабільності метрологічних характеристик передавального елемента в часі, що викликає необхідність проведення додаткових перевірок і тарувань. Також відомо пристрій для зважування [Патент США № 3894595, G01G 21/08, 21/24, опубл. 1975], що містить: платформу з силовимірювальним датчиком, змонтованим на рамі під підплатформеним механізмом, виконаним у вигляді двох U-подібних важелів, підвішених за допомогою плоских пружних шарнірів до стінок рами пристрою. Важелі зв'язані між собою пружним елементом і передають навантаження від платформи до силовимірювального датчика, електрично з'єднаного з блоком вимірювання та індикації маси. Недоліком цього пристрою є складність конструкції силовимірювального механізму та його надлишкова металоємність. Найбільш близьким до запропонованої корисної моделі щодо технічної суті та досягнутого результату є електромеханічні ваги [Патент № 68192 UA МПК G01G 19/413 (2006.01), опубл. 26.03.2012, Бюл. № 6], що містять: встановлену на пружному підвісі вантажоприймальну платформу, силопередавальний елемент, виконаний у вигляді двох, розташованих співвісно у вертикальній площині постійних магнітів з повітряним зазором між ними, силовимірювальний датчик та електрично з'єднаний з ним мікропроцесорний блок вимірювання та індикації маси. Верхній магніт закріплений безпосередньо у центрі жорсткості платформи, а нижній магніт з'єднаний з силовим входом силовимірювального датчика, причому величина повітряного зазору між магнітами у вихідному стані встановлена в залежності від сили їх відштовхування у заданому діапазоні вимірювання маси вантажу. Недоліком цих ватів є необхідність пошуку центра жорсткості платформи, що ускладнює їх виготовлення і налагоджування. В основу запропонованої корисної моделі поставлена задача спрощення процесу виготовлення, юстирування і налагоджування вагів. Поставлена задача вирішена тим, що запропоновані пружно-тензометричні платформені ваги, до складу яких входять: вантажоприймальна пружно підвішена платформа, силопередавальний вузол, силовимірювальний елемент, вихід котрого через підсилювач підключений до мікропроцесорного блока вимірювання та індикації маси, і блок живлення, згідно з корисною моделлю, силопередавальний вузол виконаний у вигляді кільцевого постійного магніту і розташованих під ним з повітряним зазором у вертикальній площині трьох стрижневих постійних магнітів, робочі поверхні кільцевого і стрижневих магнітів однополярні, а силовимірювальний елемент складається з трьох силовимірювальних датчиків, розташованих під кутом 120° один від одного у горизонтальній площині і закріплених на нерухомій основі, причому кільцевий магніт закріплений в центрі симетрії платформи, кожний стрижневий магніт з'єднаний з силовим входом відповідного силовимірювального датчика, а електричні виходи цих датчиків через суматор і підсилювач підключені до мікропроцесорного блока вимірювання та індикації маси. Запропоновані пружно-тензометричні платформені ваги дозволяють спростити процес виготовлення, юстирування і налагоджування завдяки новій конструкції силопередавального вузла, вісь якого проходить через центр симетрії платформи. Для пояснення запропонованої корисної моделі на кресленні зображена конструктивнофункціональна схема пружно-тензометричних платформених ватів. Платформа 1 встановлена на чотирьох пружних елементах 2 подвійного вигину, закріплених на нерухомій основі. Переміщення платформи 1 у вертикальній площині обмежена механічними упорами 3. В центрі симетрії платформи 1 закріплено кільцевий постійний магніт 4, під яким розташовані три силовимірювальних тензометричних датчики 5, закріплені на нерухомій основі під кутом 120 один до одного у горизонтальній площині. На силовому вході кожного датчика закріплений стрижневий постійний магніт 6. Між робочими поверхнями магніту 4 і магнітів 6 з однаковою полярністю передбачено калібрований повітряний зазор, величина якого залежить від жорсткості пружних елементів 2, магнітних характеристик магнітів 4 і 6, а також від діапазону зважування. Датчики 5 підключені до суматора 7, вихід якого через підсилювач 8 з'єднаний з входом мікропроцесорного блока 9, один з виходів якого підключений до цифрового індикатора 10 маси, а другий вихід є джерелом інформації, яка може бути використана, наприклад, в 1 UA 83142 U 5 10 15 20 25 30 35 системі автоматичного управління (САУ) тим чи іншим технологічним процесом. Від блока 11, підключеного до мережі змінного струму напругою 220 В, здійснюється живлення елементів схеми вимірювання маси. Пружно-тензометричні платформені ваги працюють наступним чином. У вихідному стані платформа 1 не навантажена, вихідний сигнал датчиків 5 дорівнює нулю і на індикаторі 11 висвітлені нулі в усіх розрядах. Після надходження вантажу, який необхідно зважити, на платформу 1 пружні елементи 2 стискаються на відповідну величину. Одночасно, пропорційно деформації пружних елементів 2 зменшується повітряний зазор δm між кільцевим магнітом 4 і стрижневими магнітами 6, що приводить до появи сили Fm=f(δm) на силовому вході силовимірювальних датчиків 5. Оскільки δm=f(m), сила Fm теж пропорційна m. Вихідні сигнали датчиків 5 надходять у суматор 7, вихідний сигнал Um якого через підсилювач 8 надходить у мікропроцесорний блок 9 і на індикаторі 10 висвітлюється маса m вантажу. Після знімання вантажу з платформи 1 силовимірювальна система повертається у вихідний стан і на індикаторі 10 висвітлюють нулі. Для захисту датчиків 5 від статичних і динамічних дестабілізуючих збурень в процесі зважування зазор δy між упорами 3 і платформою 1 менший на 10-20 % ніж фіксований початковий зазор δm між магнітами 4 і 6. Основною перевагою запропонованих пружно-тензометричних платформених вагів відносно до найближчого аналога є розміщення силопередавального вузла в центрі симетрії вантажоприймальної пружно підвішеної платформи, а не в центрі жорсткості. Це стало можливим завдяки виконанню силопередавального вузла у вигляді кільцевого магніту, закріпленого в центрі симетрії платформи, і трьох стрижневих магнітів, кожний з яких закріплений на силовому вході відповідного силовимірювального датчика, причому датчики розташовані під кутом 120° один до одного в горизонтальній площині. Така конструкція силопередавального вузла дає змогу отримати сигнал Um=f(m) незалежно від розбіжностей у жорсткості пружних елементів 2, а отже відпадає необхідність визначення координат центра жорсткості платформи і закріплення по його осі силопередавального вузла. Дослідження фізичної моделі запропонованих вагів з найбільшою межею зважування 1,0 кг дали позитивні результати. Похибка від нелінійності залежності Fm=f(δm) в діапазоні δm=1,0 мм не перевищує 0,5 %. Після лінеаризації цієї залежності програмним шляхом в блоці 9 відносна похибка зважування не перевищувала 0,05 % від найбільшої межі зважування. Це створює певні умови для отримання економічного ефекту від впровадження запропонованих вагів у виробництво та в процесі експлуатації. Таким чином, запропоновані пружно-тензометричні ваги, на відміну від найближчого аналога та інших аналогів, дають змогу одержати новий технічний результат, виражений у спрощенніпроцесу виготовлення вагів, їх юстирування і налагоджування завдяки новій конструкції силопередавального вузла, вісь якого проходить через центр симетрії платформи. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 Пружно-тензометричні платформені ваги, що містять вантажоприймальну пружно підвішену платформу, силопередавальний вузол, силовимірювальний елемент, вихід котрого через підсилювач підключений до мікропроцесорного блока вимірювання та індикації маси, і блок живлення, які відрізняються тим, що силопередавальний вузол виконаний у вигляді кільцевого постійного магніту і розташованих під ним з повітряним зазором у вертикальній площині трьох стрижневих постійних магнітів, робочі поверхні кільцевого і стрижневих магнітів однополярні, а силовимірювальний елемент складається з трьох силовимірювальних датчиків, розташованих під кутом 120° один від одного у горизонтальній площині і закріплених на нерухомій основі, причому кільцевий магніт закріплений в центрі симетрії платформи, кожний стрижневий магніт з'єднаний з силовим входом відповідного силовимірювального датчика, а електричні виходи цих датчиків через суматор і підсилювач підключені до мікропроцесорного блока вимірювання та індикації маси. 2 UA 83142 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюElastic-tensometric platform scales
Автори англійськоюBohdan Kim Stepanovych, Slazhniev Mykola Andriiovych, Sankin Anatolii Oleksiiovych
Назва патенту російськоюУпруго-тензометрические платформенные весы
Автори російськоюБогдан Ким Степанович, Слажнев Николай Андреевич, Санкин Анатолий Алексеевич
МПК / Мітки
МПК: G01G 19/12, G01G 19/00
Мітки: платформені, ваги, пружно-тензометричні
Код посилання
<a href="https://ua.patents.su/5-83142-pruzhno-tenzometrichni-platformeni-vagi.html" target="_blank" rel="follow" title="База патентів України">Пружно-тензометричні платформені ваги</a>
Пружинно-тензометричні ваги
Номер патенту: 36148
Опубліковано: 10.10.2008
Автори: Санкін Анатолій Олексійович, Богдан Кім Степанович
МПК: G01G 19/00
Мітки: ваги, пружинно-тензометричні
Формула / Реферат:
Пружинно-тензометричні ваги, до складу яких входять вантажоприймальна пружно підвішена платформа, силопередавальний елемент, з'єднаний з платформою в її центрі жорсткості, силовимірювальний датчик, вихід котрого через підсилювач підключений до мікропроцесорного блока вимірювання та індикації маси, і блок живлення, які відрізняються тим, що силопередавальний елемент виконаний у вигляді двох співвісно розташованих постійних кільцевих магнітів і...
Електромеханічні платформені ваги
Номер патенту: 79755
Опубліковано: 25.04.2013
Автори: Слажнєв Микола Андрійович, Санкін Анатолій Олексійович, Богдан Кім Степанович
МПК: G01G 19/12, G01G 19/00
Мітки: платформені, ваги, електромеханічні
Формула / Реферат:
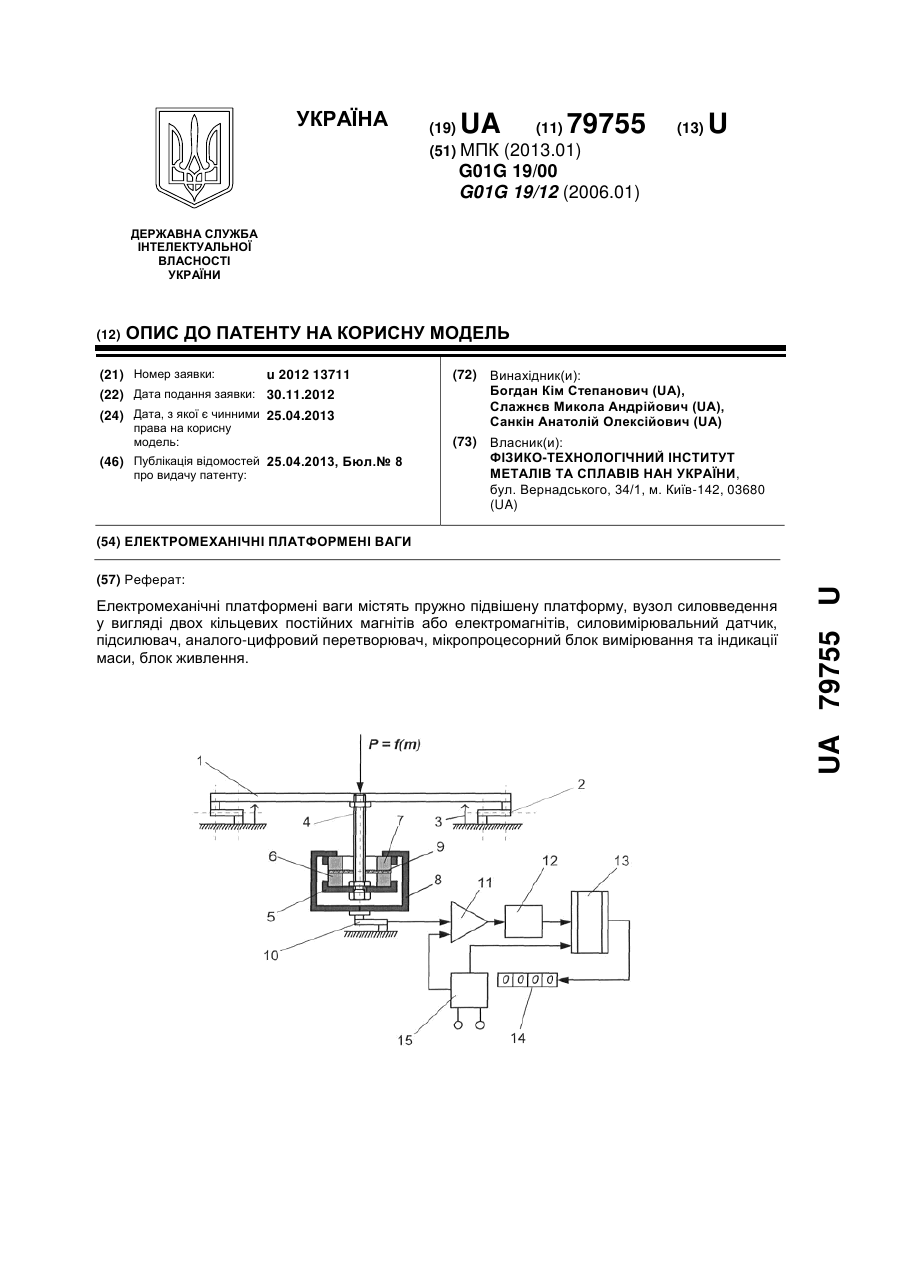
Електромеханічні платформені ваги, що містять пружно підвішену платформу, вузол силовведення, вхід якого з'єднаний з центром жорсткості платформи, а вихід - з силовим входом силовимірювального датчика, підсилювач, аналого-цифровий перетворювач, мікропроцесорний блок вимірювання та індикації маси і блок живлення, які відрізняються тим, що вузол силовведення виконаний у вигляді двох кільцевих постійних магнітів або електромагнітів, один з...
Електромеханічні ваги
Номер патенту: 68192
Опубліковано: 26.03.2012
Автори: Богдан Кім Степанович, Санкін Анатолій Олексійович
МПК: G01G 19/413
Мітки: ваги, електромеханічні
Формула / Реферат:
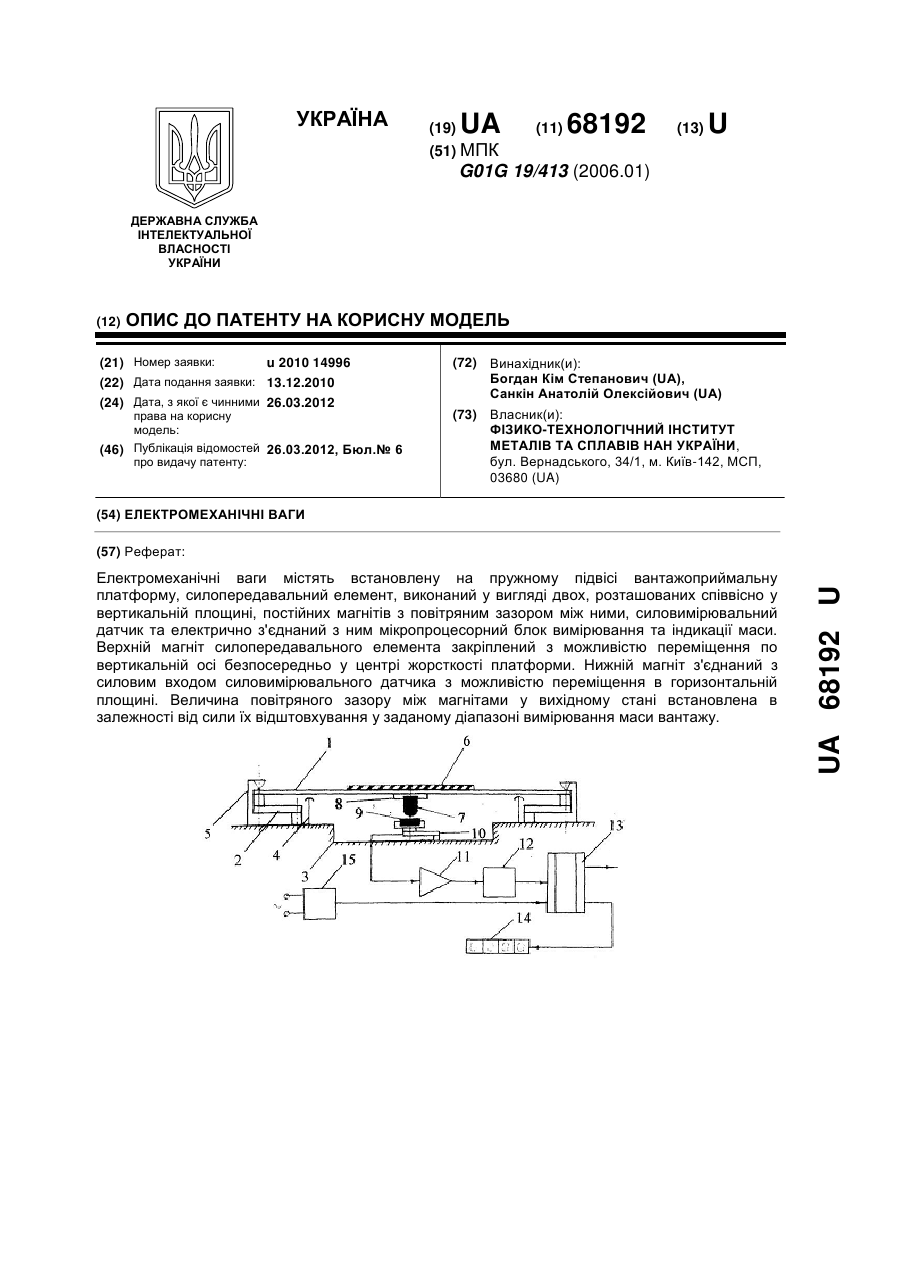
Електромеханічні ваги, що містять встановлену на пружному підвісі вантажоприймальну платформу, силопередавальний елемент, виконаний у вигляді двох, розташованих співвісно у вертикальній площині, постійних магнітів з повітряним зазором між ними, силовимірювальний датчик та електрично з'єднаний з ним мікропроцесорний блок вимірювання та індикації маси, які відрізняються тим, що верхній магніт силопередавального елемента закріплений з...
Низькопрофільні гідроелектронні ваги
Номер патенту: 38630
Опубліковано: 12.01.2009
Автори: Санкін Анатолій Олексійович, Богдан Кім Степанович, Терновой Сергій Анатолійович
МПК: G01G 19/00, G01G 5/00
Мітки: низькопрофільні, гідроелектронні, ваги
Формула / Реферат:
Низькопрофільні гідроелектронні ваги, до складу яких входять: жорстка основа; вантажоприймальна пружно підвішена платформа; гідроопори; суматор тиску; гідравлічний дросель; гідроелектронний перетворювач тиску в електричний сигнал, пропорційний масі вантажу на платформі; підсилювач; аналого-цифровий перетворювач; мікропроцесорний блок вимірювання та індикації маси; блок живлення, які відрізняються тим, що гідроопори жорстко закріплені на...
Дводіапазонні електромеханічні ваги
Номер патенту: 35005
Опубліковано: 26.08.2008
Автори: Санкін Анатолій Олексійович, Богдан Кім Степанович
МПК: G01G 19/00
Мітки: ваги, електромеханічні, дводіапазонні
Формула / Реферат:
Дводіапазонні електромеханічні ваги, що містять вантажоприймальну платформу на пружному підвісі, нерівноплечий вимірювальний важіль, установлений на нерухомій основі, одне плече якого через передавальний пружний елемент з'єднане з силовим входом силовимірювального датчика, а друге через електромагнітний фіксатор - з центром жорсткості платформи, мікропроцесорний блок вимірювання маси, цифровий індикатор, блок живлення, які відрізняються тим,...
Попередній патент: Пристрій для зменшення енергії горизонтального потоку урагану
Наступний патент: Установка для синтезу вуглецевих наноматеріалів
Випадковий патент: Пристрій управління регулятором