Стабілізатор лінії прицілювання танкової гармати
Номер патенту: 83904
Опубліковано: 10.10.2013
Автори: Зейн Алі Вахіб, Лазаренко Артем Олександрович, Александрова Тетяна Євгенівна

Формула / Реферат
Стабілізатор лінії прицілювання танкової гармати, який містить гіроскопічну платформу і рухоме дзеркало прицілу, положення якого визначає напрямок лінії прицілювання, а також давачі кутів повороту зовнішньої рамки гіроскопічної платформи і рухомого дзеркала прицілу, виходи яких електрично з'єднані зі входами електронного блока, і виконавчий електродвигун з обмоткою керування, якір якого через механічний редуктор з'єднаний з рухомим дзеркалом прицілу, який відрізняється тим, що введені перетворювачі "аналог-код" і "код-аналог", а також цифрові фільтри Баттеруорта і Ланцоша, які з'єднані за послідовно-паралельною схемою, причому вхід перетворювача "аналог-код" з'єднаний з виходом електронного блока, а вихід з'єднаний з послідовно-паралельним з'єднанням фільтрів Баттеруорта і Ланцоша, вихід якого з'єднаний зі входами перетворювача "код-аналог", а вихід перетворювача "код-аналог" електрично з'єднаний з обмоткою керування виконавчого електродвигуна.
Текст
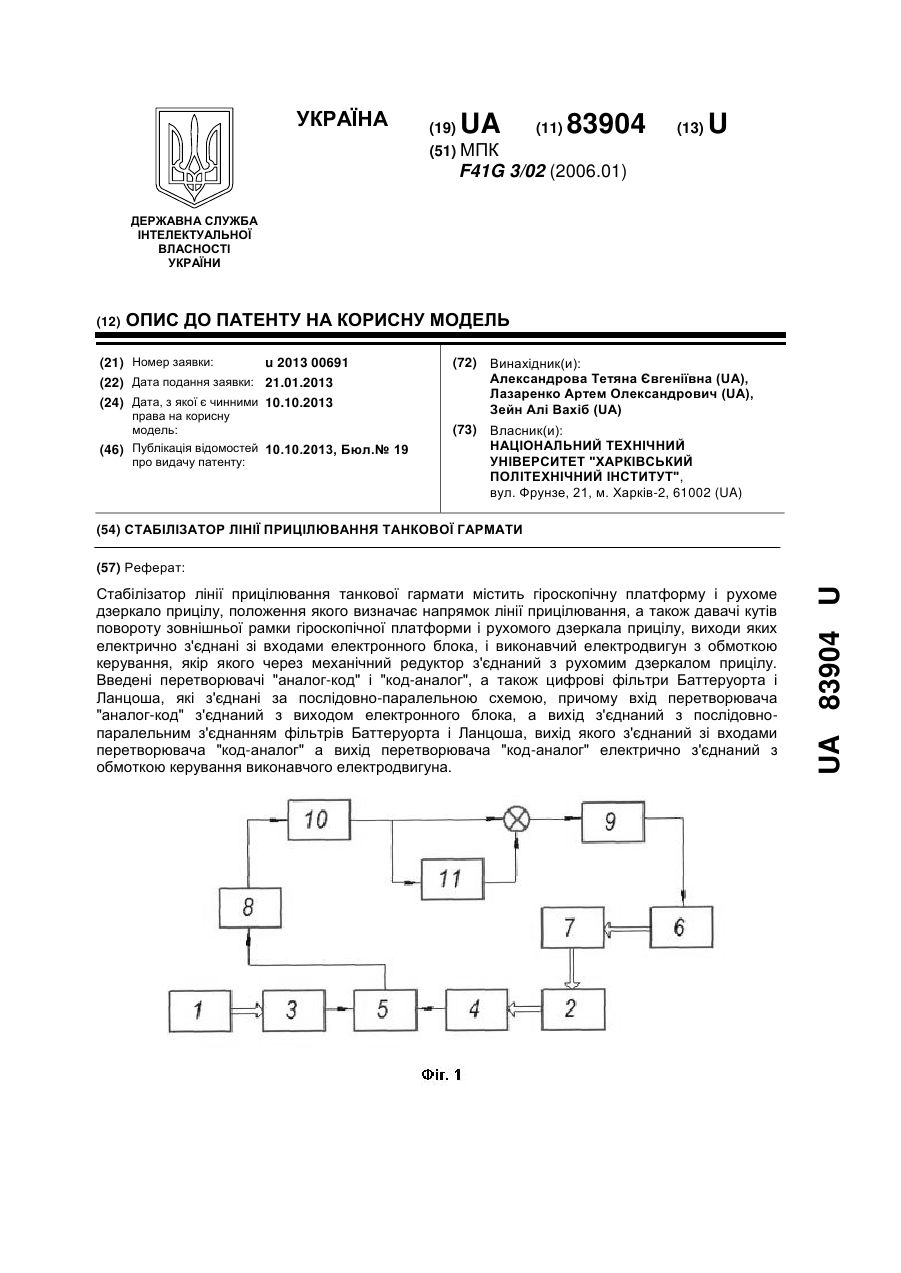
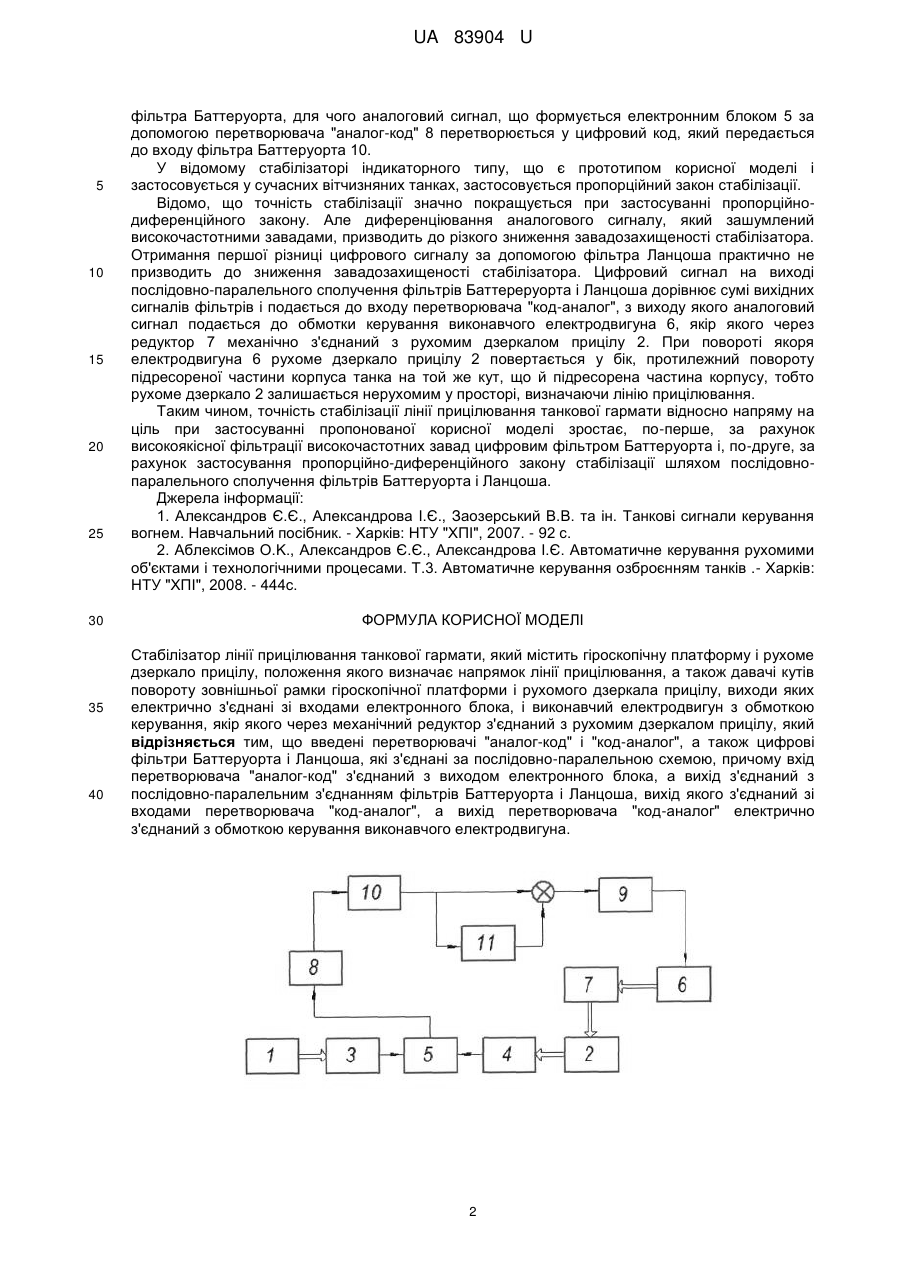
Реферат: UA 83904 U UA 83904 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі танкобудування і може бути використана в системах керування вогнем танків. Відомий стабілізатор лінії прицілювання танкової гармати, який містить гіроскопічну платформу і рухоме дзеркало прицілу, положення якого визначає напрямок лінії прицілювання, причому зовнішня рамка гіроскопічної платформи за допомогою стрічкової передачі з'єднана з рухомим дзеркалом прицілу [1]. Такий стабілізатор з механічним зв'язком гіроплатформи з рухомим дзеркалом прицілу називається силовим стабілізатором. Точність стабілізації лінії прицілювання за допомогою силового стабілізатора визначається амплітудами прецесійних і нутаційних коливань рамок гіроскопічної платформи. Система розвантаження гіроскопічної платформи має релейну характеристику з зоною нечутливості. Внаслідок цього, а також присутності "сухого" тертя у осях гіроскопічної рами, рамки гіроскопічної платформи здійснюється автоколивання з частотою близько 200 Гц. Ці автоколивання приводять до спотворення (розмивання) зображення цілі в прицілі танкової гармати. Відомий також індикаторний стабілізатор лінії прицілювання [2], вибраний прототипом пропонованої корисної моделі. Для підвищення точності стабілізації лінії прицілювання в індикаторному стабілізаторі гіроскопічна платформа та рухоме дзеркало прицілу механічно роз'єднані, а зв'язок між ними здійснюється через слідкуючий привод дистанційної передачі кута. Стабілізатор містить давачі кутів повороту зовнішньої рамки гіроскопічної платформи і рухомого дзеркала прицілу, виходи яких електрично з'єднані зі входами електронного блока, і виконавчий електродвигун з обмоткою керування, якір якого через механічний редуктор з'єднаний з рухомим дзеркалом прицілу. Як давачі кутів в стабілізаторах індикаторного типу використовують обертові трансформатори, вихідні сигнали яких є сигналами змінного струму з частотою 400-500 Гц, які здатні фіксувати високочастотні автоколивання гіроскопічної платформи. Виконавчий двигун має малу постійну часу Т∂≈0,01 с і тому не в змозі повністю фільтрувати високочастотні завади вихідного сигналу електронного блока. Точність стабілізації лінії прицілювання за допомогою стабілізатора індикаторного типу, хоча й вище у порівнянні зі стабілізатором силового типу, але залишається недостатньо високою. В основу запропонованої корисної моделі поставлено задачу підвищення точності стабілізації лінії прицілювання, що приводить до підвищення точності стрільби з танкової гармати, як звичайними боезарядами, так і танковими керованими ракетами, що наводяться на ціль відносно лазерного променю танкового прицілу, який визначає лінію прицілювання. Задача підвищення точності стабілізації лінії прицілювання вирішується застосуванням цифрових фільтрів Баттеруорта і Ланцоша, які мають високі фільтруючі властивості. Для цього до складу індикаторного стабілізатора лінії прицілювання введені перетворювачі "аналог-код" і "код-аналог", а також цифрові фільтри Баттеруорта і Ланцоша, які з'єднані за послідовнопаралельною схемою, причому вхід перетворювача "аналог-код" з'єднаний з виходом електронного блока, а вихід з'єднаний з послідовно-паралельним з'єднанням фільтрів Баттеруорта і Ланцоша, вихід якого з'єднаний зі входом перетворювача "код-аналог", а вихід перетворювача "код-аналог" електрично з'єднаний з обмоткою керування виконавчого електродвигуна. На кресленні показано структурну схему пропонованого стабілізатора лінії прицілювання танкової гармати. Схема містить гіроскопічну платформу 1, рухоме дзеркало прицілу 2, давач кута повороту зовнішньої рамки гіроскопічної платформи 3, давач кута повороту рухомого дзеркала прицілу 4, електронний блок 5, виконавчий електродвигун 6, механічний редуктор 7. З метою підвищення точності стабілізації лінії прицілювання відносно напрямку на ціль в схему введені перетворювач "аналог-код" 8, перетворювач "код-аналог" 9, фільтр Баттеруорта 10 і фільтр Ланцоша 11, які сполучені за послідовно-паралельною схемою. Стабілізатор лінії прицілювання танкової гармати працює наступним чином. В процесі руху танка підресорена частина його корпусу здійснює подовжньо-кутові коливання. Рамки гіроскопічної платформи 1 при цьому зберігають незмінним своє положення у просторі, тобто вихідний сигнал давача 3, що подається до входу електронного блока 5, залишається незмінним. Рухоме дзеркало прицілу 2 обертається разом із підресореною частиною корпусу танка і на виході давача 4 з'являється сигнал, пропорційний куту повороту дзеркала 2, який подається до входу електронного блока 5, в якому вихідні сигнали давачів 3 і 4 випростовуються і порівнюються один з одним. На виході електронного блока 5 має місце електричний сигнал постійного струму, пропорційний різниці кутів повороту зовнішньої рамки гіроскопічної платформи 1 і рухомого дзеркала прицілу 2. Внаслідок приведених вище причин цей сигнал є зашумленим високочастотними завадами. У зв'язку з тим, що аналогові фільтри не досить якісно фільтрують високочастотні завади, пропонується застосування цифрового 1 UA 83904 U 5 10 15 20 25 30 35 40 фільтра Баттеруорта, для чого аналоговий сигнал, що формується електронним блоком 5 за допомогою перетворювача "аналог-код" 8 перетворюється у цифровий код, який передається до входу фільтра Баттеруорта 10. У відомому стабілізаторі індикаторного типу, що є прототипом корисної моделі і застосовується у сучасних вітчизняних танках, застосовується пропорційний закон стабілізації. Відомо, що точність стабілізації значно покращується при застосуванні пропорційнодиференційного закону. Але диференціювання аналогового сигналу, який зашумлений високочастотними завадами, призводить до різкого зниження завадозахищеності стабілізатора. Отримання першої різниці цифрового сигналу за допомогою фільтра Ланцоша практично не призводить до зниження завадозахищеності стабілізатора. Цифровий сигнал на виході послідовно-паралельного сполучення фільтрів Баттереруорта і Ланцоша дорівнює сумі вихідних сигналів фільтрів і подається до входу перетворювача "код-аналог", з виходу якого аналоговий сигнал подається до обмотки керування виконавчого електродвигуна 6, якір якого через редуктор 7 механічно з'єднаний з рухомим дзеркалом прицілу 2. При повороті якоря електродвигуна 6 рухоме дзеркало прицілу 2 повертається у бік, протилежний повороту підресореної частини корпуса танка на той же кут, що й підресорена частина корпусу, тобто рухоме дзеркало 2 залишається нерухомим у просторі, визначаючи лінію прицілювання. Таким чином, точність стабілізації лінії прицілювання танкової гармати відносно напряму на ціль при застосуванні пропонованої корисної моделі зростає, по-перше, за рахунок високоякісної фільтрації високочастотних завад цифровим фільтром Баттеруорта і, по-друге, за рахунок застосування пропорційно-диференційного закону стабілізації шляхом послідовнопаралельного сполучення фільтрів Баттеруорта і Ланцоша. Джерела інформації: 1. Александров Є.Є., Александрова І.Є., Заозерський В.В. та ін. Танкові сигнали керування вогнем. Навчальний посібник. - Харків: НТУ "ХПІ", 2007. - 92 с. 2. Аблексімов O.K., Александров Є.Є., Александрова І.Є. Автоматичне керування рухомими об'єктами і технологічними процесами. Т.3. Автоматичне керування озброєнням танків .- Харків: НТУ "ХПІ", 2008. - 444с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Стабілізатор лінії прицілювання танкової гармати, який містить гіроскопічну платформу і рухоме дзеркало прицілу, положення якого визначає напрямок лінії прицілювання, а також давачі кутів повороту зовнішньої рамки гіроскопічної платформи і рухомого дзеркала прицілу, виходи яких електрично з'єднані зі входами електронного блока, і виконавчий електродвигун з обмоткою керування, якір якого через механічний редуктор з'єднаний з рухомим дзеркалом прицілу, який відрізняється тим, що введені перетворювачі "аналог-код" і "код-аналог", а також цифрові фільтри Баттеруорта і Ланцоша, які з'єднані за послідовно-паралельною схемою, причому вхід перетворювача "аналог-код" з'єднаний з виходом електронного блока, а вихід з'єднаний з послідовно-паралельним з'єднанням фільтрів Баттеруорта і Ланцоша, вихід якого з'єднаний зі входами перетворювача "код-аналог", а вихід перетворювача "код-аналог" електрично з'єднаний з обмоткою керування виконавчого електродвигуна. 2 UA 83904 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F41G 3/02
Мітки: гармати, стабілізатор, лінії, танкової, прицілювання
Код посилання
<a href="https://ua.patents.su/5-83904-stabilizator-lini-pricilyuvannya-tankovo-garmati.html" target="_blank" rel="follow" title="База патентів України">Стабілізатор лінії прицілювання танкової гармати</a>
Стабілізатор танкової гармати
Номер патенту: 83903
Опубліковано: 10.10.2013
Автори: Александрова Тетяна Євгенівна, Лазаренко Артем Олександрович
МПК: F41G 5/00
Мітки: гармати, стабілізатор, танкової
Формула / Реферат:
Стабілізатор танкової гармати, який містить пульт наведення, гіроскопічні датчики відхилення осі каналу стволу танкової гармати у вертикальній і горизонтальній площинах відносно лінії прицілювання, гіроскопічні датчики кутових швидкостей обертання танкової гармати відносно осі цапф у вертикальній площині і танкової башти з гарматою у горизонтальної площині, датчик лінійних прискорень танкової башти відносної поперечної осі інерції,...
Система керування заряджаючим механізмом танкової гармати
Номер патенту: 61129
Опубліковано: 17.11.2003
Автори: Царєв Ігор Володимирович, Ганзера Юрій Іванович, Мошнін Віктор Миколайович, Петраченко Любов Парфенівна
Мітки: заряджаючим, система, керування, танкової, механізмом, гармати
Формула / Реферат:
1. Система керування заряджаючим механізмом танкової гармати, що містить блок дозволу пострілу балістичного обчислювача, блок керування заряджанням прицілу навідника, блок керування стрільбою прицілу навідника, з'єднаний першим входом з першим виходом блока керування заряджанням прицілу навідника, електроприводи автомата заряджання, підключені до першого виходу коробки розподільної автомата заряджання, коробку пуску стрільби з гармати, яка...
Спосіб автоматичної компенсації відхилення лінії візування прицілу гармати бронемашини і пристрій для його здійснення
Номер патенту: 49958
Опубліковано: 15.10.2002
Автори: Ревякин Леонід Дмитрович, Глущенко Анатолій Романович, Фролов Леонід Андрійович, Гордієнко Валентин Іванович, Хомченко Олексій Якович
МПК: F41G 3/02
Мітки: компенсації, бронемашини, автоматичної, прицілу, гармати, відхілення, візування, лінії, спосіб, здійснення, пристрій
Формула / Реферат:
1. Спосіб автоматичної компенсації відхилення лінії візування прицілу гармати бронемашини, який полягає в тому, що в канали наведення прицілу за висотою та напрямком вводять компенсаційні сигнали, пропорційні відхиленню лінії візування за висотою та напрямком, в протифазі по відношенню до напрямку руху відхилення, який відрізняється тим, що гармату приводять на певний кут і фіксують її положення на жорсткій опорі, вимикають приводи гармати та...
Спосіб наведення лінії прицілювання для системи керування озброєнням об’єктів бронетанкової техніки
Номер патенту: 75129
Опубліковано: 15.03.2006
Автори: Хомченко Олексій Якович, Ревякин Леонід Дмитрович, Гордієнко Валентин Іванович, Замосенчук Володимир Миколайович
Мітки: озброєнням, наведення, прицілювання, спосіб, бронетанкової, лінії, техніки, керування, об'єктів, системі
Формула / Реферат:
Спосіб наведення лінії прицілювання системи керування озброєнням об'єктів бронетанкової техніки, який полягає в тому, що формують плавну кутову швидкість наведення лінії прицілювання пропорційно квадрату кута повороту органів керування пульта наведення відповідно до виразу , де
Пристрій для прицілювання для вогнепальної зброї і вогнепальна зброя з можливістю встановлення пристрою для прицілювання
Номер патенту: 83822
Опубліковано: 26.08.2008
Автор: Крістіан Шерпф
МПК: F41G 3/06
Мітки: зброї, пристрій, пристрою, вогнепальна, прицілювання, можливістю, вогнепальної, зброя, встановлення
Формула / Реферат:
1. Пристрій для прицілювання для вогнепальної зброї з індикаторним пристроєм, який є складовою вимірювального пристрою для визначення відстані до цілі, яку спостерігають і яку можна бачити у полі зору стрільця, який відрізняється тим, що має перехідний пристрій (11), за допомогою якого розташовані у/на пристрої для прицілювання (1) складові вимірювального пристрою у визначеному режимі монтажу пристрою для прицілювання (1) на вогнепальній...
Попередній патент: Стабілізатор танкової гармати
Наступний патент: Пристрій для очищення дренажних трубопроводів
Випадковий патент: Вибухонепроникна оболонка з швидкозмінним кабельним уводом