Система автоматичного управління паркуванням транспортних засобів
Номер патенту: 87089
Опубліковано: 27.01.2014
Автори: Хлівнюк Ванда Олександрівна, Кулік Анатолій Степанович, Дергачов Костянтин Юрійович, Харіна Наталія Миколаївна



Формула / Реферат
Система автоматичного управління паркуванням транспортних засобів, що містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаний з глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем інформації, бездротовий передавач інформації, входи та виходи якого з'єднані з керуючим контролером та центральною станцією, пристрій відображення цифрової картографічної інформації, вхід якого з'єднаний з 1-м виходом керуючого контролера, цифрова карта місцевості, вихід якої з'єднаний зі входом центральної станції, яка відрізняється тим, що введені блок вибору площадок паркування, вхід якого з'єднаний з глобальною супутниковою системою, а вихід з входом блока аналізу парковки, блок аналізу парковки, вихід якого з'єднаний з центральною станцією, та блок інформування про парковки, вхід якого з'єднаний з 2-м виходом керуючого контролера, а вихід з пристроєм відображення цифрової картографічної інформації.
Текст
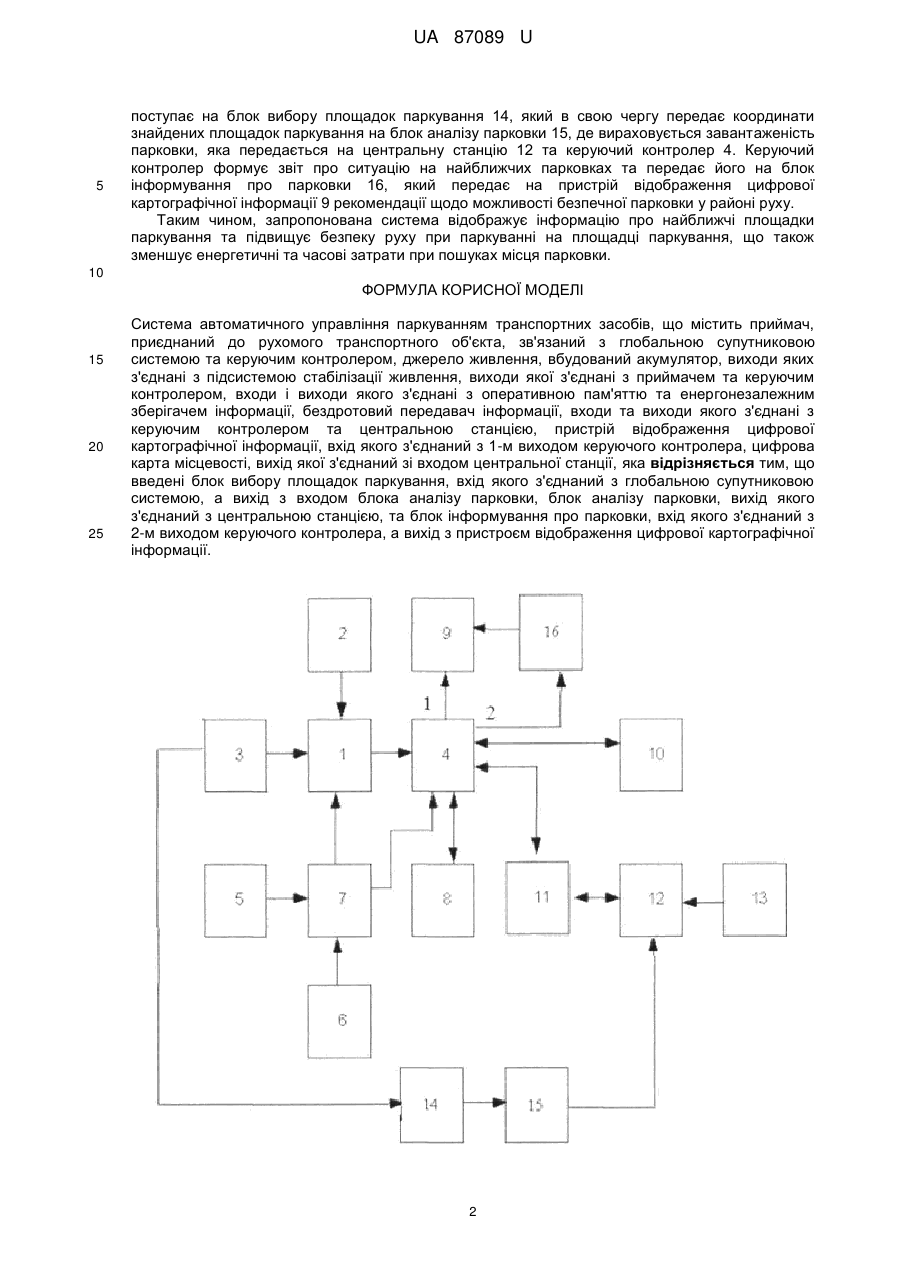
Реферат: Система автоматичного управління паркуванням транспортних засобів, містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаний з глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, бездротовий передавач інформації, входи та виходи якого з'єднані з керуючим контролером та центральною станцією, пристрій відображення цифрової картографічної інформації. Введені блок вибору площадок паркування, вхід якого з'єднаний з глобальною супутниковою системою, а вихід з входом блока аналізу парковки, блок аналізу парковки, вихід якого з'єднаний з центральною станцією, та блок інформування про парковки, вхід якого з'єднаний з 2-м виходом керуючого контролера, а вихід з пристроєм відображення цифрової картографічної інформації. UA 87089 U (54) СИСТЕМА АВТОМАТИЧНОГО УПРАВЛІННЯ ПАРКУВАННЯМ ТРАНСПОРТНИХ ЗАСОБІВ UA 87089 U UA 87089 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі навігації та може бути використана для здійснення контролю за переміщенням рухомих об'єктів, таких як автотранспорт, військова техніка, водний транспорт, транспортні засоби міських комунальних служб та підвищення безпеки їхнього руху. Найбільш близькою є автоматизована система побудови оптимального маршруту руху транспортного агрегату [Пат. України № 53723, опубл. 11.10.2010, Бюл. № 19, 2010 p.], що містить приймач, приєднаний до рухомого об'єкта, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем інформації, центральну станцію, бездротовий передавач інформації, входи і виходи якого зв'язані з керуючим контролером та центральною станцією, пристрій відображення цифрової картографічної інформації, вхід якого з'єднаний з керуючим контролером, цифрова карта місцевості, вихід якої з'єднаний зі входом центральної станції. Недоліком даної системи є неможливість відображення інформації про найближчі площадки паркування та неможливість контролю безпеки руху при паркуванні на площадці паркування та контролю енергетичних та часових затрат при пошуках місця парковки. В основу корисної моделі поставлено задачу аналізу місцезнаходження площадок паркування та аналізу їх завантаженості, що дозволить скоротити енергетичні витрати та підвищити безпеку руху при паркуванні. Поставлена задача вирішується тим, що в систему, що містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаного з глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем інформації, центральну станцію, бездротовий передавач інформації, входи та виходи якого з'єднані з керуючим контролером та центральною станцією, пристрій відображення цифрової картографічної інформації, вхід якого з'єднаний з керуючим контролером, цифрова карта місцевості, вихід якої з'єднаний зі входом центральної станції, згідно з корисною моделлю в неї введені блок вибору площадок паркування вхід якого з'єднаний з глобальною супутниковою системою, а вихід з блоком аналізу парковки, блок аналізу парковки, вихід якого з'єднаний з центральною станцією, та блок інформування про парковки вхід якого з'єднаний з керуючим контролером, а вихід з пристроєм відображення цифрової картографічної інформації. На кресленні показана блок-схема системи автоматичного управління паркуванням транспортних засобів. Система автоматичного управління паркуванням транспортних засобів містить приймач 1, приєднаний до рухомого транспортного об'єкту 2, зв'язаний із глобальною супутниковою системою 3 та керуючим контролером 4, джерело живлення 5, вбудований акумулятор 6, виходи яких з'єднані з підсистемою стабілізації живлення 7, виходи якої з'єднані з приймачем 1 та керуючим контролером 4, входи і виходи якого зв'язані з оперативною пам'яттю 8 та енергонезалежним зберігачем інформації 10, пристрій відображення цифрової картографічної інформації 9, вхід якого з'єднаний з 1-м виходом керуючого контролера 4, бездротовий передавач інформації 11, входи і виходи якого зв'язані з керуючим контролером 4 та центральною станцією 12, цифрову карту місцевості 13, вихід якої з'єднаний зі входом центральної станції 12, блок вибору площадок паркування 14, вхід якого з'єднаний з глобальною супутниковою системою 3, а вихід з блоком аналізу парковки 15, а вихід блоку аналізу парковки 15 з центральною станцією 12 та блок інформування про парковки 16 вхід якого з'єднаний з 2-м виходом керуючого контролера 4, а вихід з пристроєм відображення цифрової картографічної інформації 9. Запропонована система працює наступним чином. Керуючий контролер 4 приймає інформацію про рухомий об'єкт 2 від приймача 1, який, в свою чергу, приймає дані за допомогою глобальної супутникової системи 3. Керуючий контролер 4 перетворює прийняту цифрову інформацію про координати рухомого об'єкту у формат, необхідний для пристрою відображення інформації 9 та подальшої їх передачі на центральну станцію 12. Живлення системи здійснюється через джерело живлення 5 або через вбудований акумулятор 6. Керуючий контролер 4 фіксує визначення поточних координат рухомого об'єкту 2, а також якість прийнятих сигналів від глобальної супутникової системи 3. Інформація про час, координати та якість функціонування приймача 1 передається за допомогою бездротового передавача інформації 11 на центральну станцію 12, яка, в свою чергу, таким же чином видає аркуш цифрової карти місцевості 13 згідно з координатами рухомого об'єкту 2 на керуючий контролер 4. З глобальної супутникової системи інформація 1 UA 87089 U 5 поступає на блок вибору площадок паркування 14, який в свою чергу передає координати знайдених площадок паркування на блок аналізу парковки 15, де вираховується завантаженість парковки, яка передається на центральну станцію 12 та керуючий контролер 4. Керуючий контролер формує звіт про ситуацію на найближчих парковках та передає його на блок інформування про парковки 16, який передає на пристрій відображення цифрової картографічної інформації 9 рекомендації щодо можливості безпечної парковки у районі руху. Таким чином, запропонована система відображує інформацію про найближчі площадки паркування та підвищує безпеку руху при паркуванні на площадці паркування, що також зменшує енергетичні та часові затрати при пошуках місця парковки. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 Система автоматичного управління паркуванням транспортних засобів, що містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаний з глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем інформації, бездротовий передавач інформації, входи та виходи якого з'єднані з керуючим контролером та центральною станцією, пристрій відображення цифрової картографічної інформації, вхід якого з'єднаний з 1-м виходом керуючого контролера, цифрова карта місцевості, вихід якої з'єднаний зі входом центральної станції, яка відрізняється тим, що введені блок вибору площадок паркування, вхід якого з'єднаний з глобальною супутниковою системою, а вихід з входом блока аналізу парковки, блок аналізу парковки, вихід якого з'єднаний з центральною станцією, та блок інформування про парковки, вхід якого з'єднаний з 2-м виходом керуючого контролера, а вихід з пристроєм відображення цифрової картографічної інформації. 2 UA 87089 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюKulik Anatolii Stepanovych, Derhachov Kostiantyn Yuriiovych
Автори російськоюКулик Анатолий Степанович, Дергачев Константин Юрьевич
МПК / Мітки
МПК: G01S 3/02
Мітки: система, управління, транспортних, паркуванням, автоматичного, засобів
Код посилання
<a href="https://ua.patents.su/5-87089-sistema-avtomatichnogo-upravlinnya-parkuvannyam-transportnikh-zasobiv.html" target="_blank" rel="follow" title="База патентів України">Система автоматичного управління паркуванням транспортних засобів</a>
Автоматизована інтелектуальна транспортна система
Номер патенту: 78878
Опубліковано: 10.04.2013
Автори: Дергачев Костянтин Юрійович, Кулік Анатолій Степанович, Харіна Наталія Миколаївна, Бортник Христина Романівна
МПК: G01S 3/02
Мітки: інтелектуальна, автоматизована, система, транспортна
Формула / Реферат:
Автоматизована інтелектуальна транспортна система, що містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаний з глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем інформації,...
Система автоматичного виявлення місцезнаходження рухомих об’єктів
Номер патенту: 79322
Опубліковано: 25.04.2013
Автори: Кулік Анатолій Степанович, Дергачов Костянтин Юрійович, Резник Ігор Сергійович
МПК: G01S 3/02
Мітки: виявлення, автоматичного, система, об'єктів, місцезнаходження, рухомих
Формула / Реферат:
Система автоматичного виявлення місцезнаходження рухомого об'єкта, що містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщено на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднано з виходом джерела живлення та акумулятором, а вихід...
Система автоматичного виявлення місцезнаходження рухомого об’єкта
Номер патенту: 55408
Опубліковано: 10.12.2010
Автори: Сосницький Віталій Валерійович, Дергачов Костянтин Юрійович, Кулік Анатолій Степанович
МПК: G01S 3/02
Мітки: рухомого, система, виявлення, автоматичного, місцезнаходження, об'єкта
Формула / Реферат:
Система автоматичного виявлення місцезнаходження рухомого об'єкта, яка містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід...
Автоматизована система побудови оптимального маршруту руху транспортного агрегату
Номер патенту: 53723
Опубліковано: 11.10.2010
Автори: Кулік Анатолій Степанович, Грібков Антон Євгенович, Морозов Володимир Володимирович, Дергачов Костянтин Юрійович
МПК: G01S 3/02
Мітки: система, руху, побудови, агрегату, маршруту, транспортного, автоматизована, оптимального
Формула / Реферат:
Автоматизована система побудови оптимального маршруту руху транспортного агрегату, що містить приймач, приєднаний до рухомого об'єкта, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним...
Система автоматичного регулювання паливоподачі дизель-генераторної установки транспортних засобів
Номер патенту: 62057
Опубліковано: 15.12.2003
Автори: Басов Олександр Віталійович, Дубровський Володимир Захарович, Богаєвський Олександр Борисович, Синельникова Ліля Борисівна
МПК: F02D 29/06
Мітки: система, паливоподачі, автоматичного, засобів, транспортних, регулювання, дизель-генераторної, установки
Формула / Реферат:
Система автоматичного регулювання паливоподачі дизель-генераторної установки транспортних засобів, що включає до свого складу дизель, мікроконтролерний блок керування (МБК), виконавчий механізм управління положенням рейок паливних насосів з датчиком ходу рейок паливних насосів, датчик частоти обертання колінчастого вала дизеля, датчик температури дизеля, датчик тиску наддуву повітря, контролер задання частоти обертання вала дизеля, виходи...
Попередній патент: Шестигранний стільниковий заповнювач
Наступний патент: Установка для гравірування лазерним променем
Випадковий патент: Регулятор частоти обертання двигуна внутрішнього згоряння