Автоматизована інтелектуальна транспортна система
Номер патенту: 88529
Опубліковано: 25.03.2014
Автори: Дергачов Костянтин Юрійович, Охрімчук Юлія Володимирівна, Гармаш Роман Володимирович, Кулік Анатолій Степанович
Формула / Реферат
Автоматизована інтелектуальна транспортна система, що містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаний з глобальною супутниковою системою та керуючим контролером, джерело живлення та вбудовані акумуляторні батареї, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем інформації, бездротовий передавач/приймач інформації, входи та виходи якого з'єднані з керуючим контролером та центральною станцією, пристрій відображення цифрової картографічної інформації, вхід якого з'єднаний з керуючим контролером, цифрова карта місцевості, яка відрізняється тим, що, введені блок додаткових картографічних даних про стан доріг на вхід якого підключена цифрова карта місцевості, а вихід з'єднаний з центральною станцією, блок формування поточної інформації про завантаження доріг, вхід якого з'єднаний з мережею відеокамер, а вихід з блоком додаткових картографічних даних про стан доріг, блок аналізу інформації про стан доріг наданої користувачем, вхід якого з'єднаний з виходом центральної станції, а вихід підключений до блока додаткових картографічних даних про стан доріг, блок вводу інформації про стан дороги від користувача, вихід якого з'єднаний з керуючим контролером.
Текст
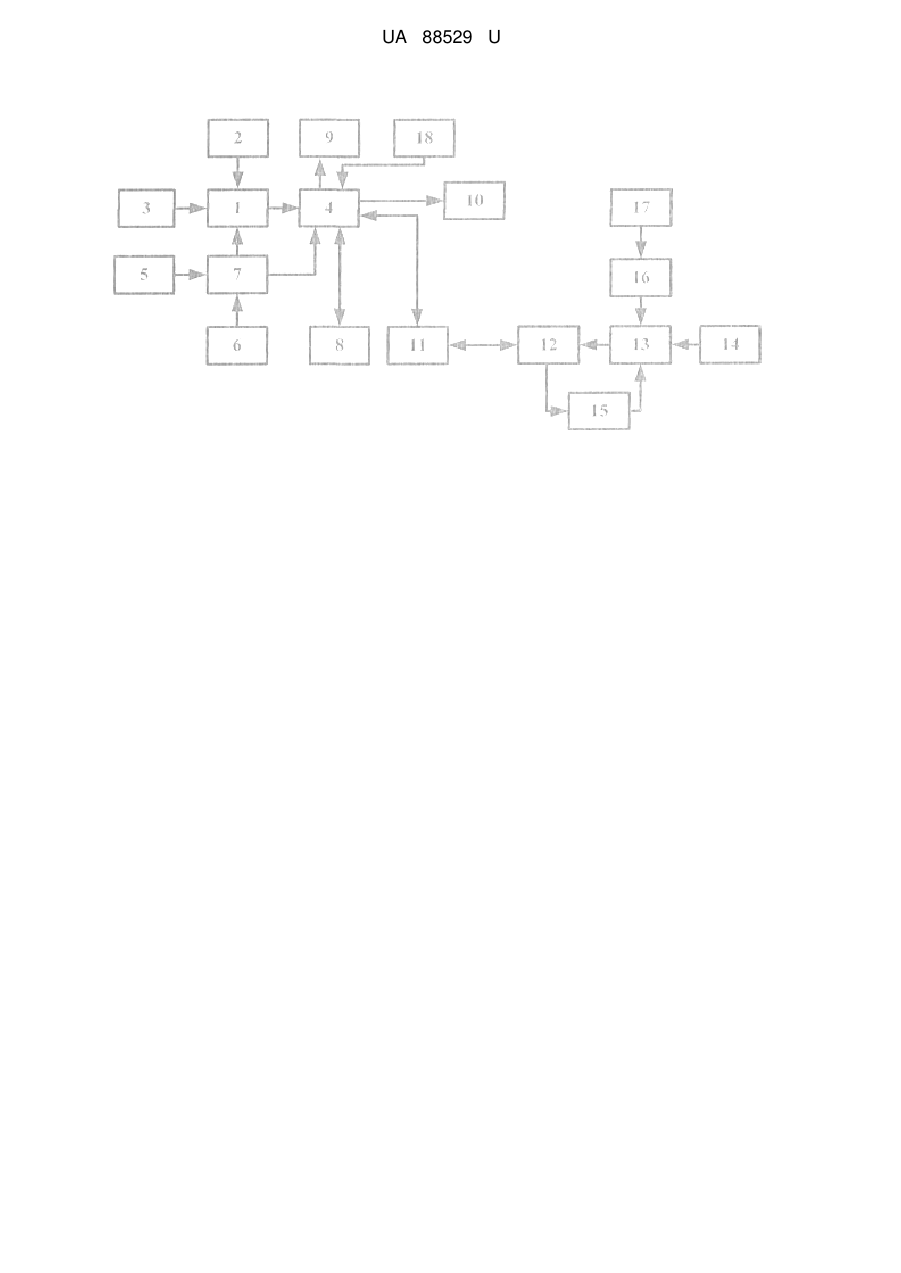
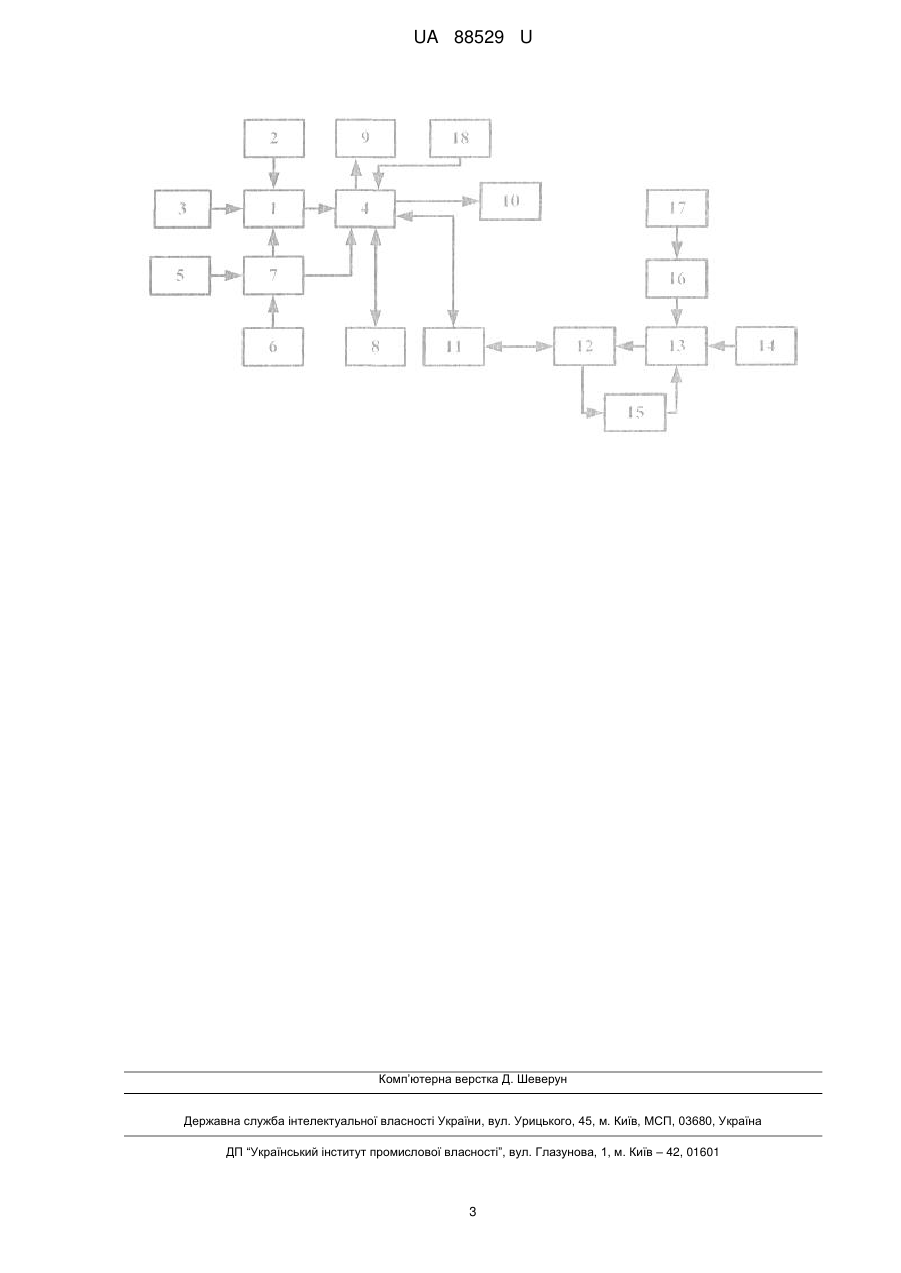
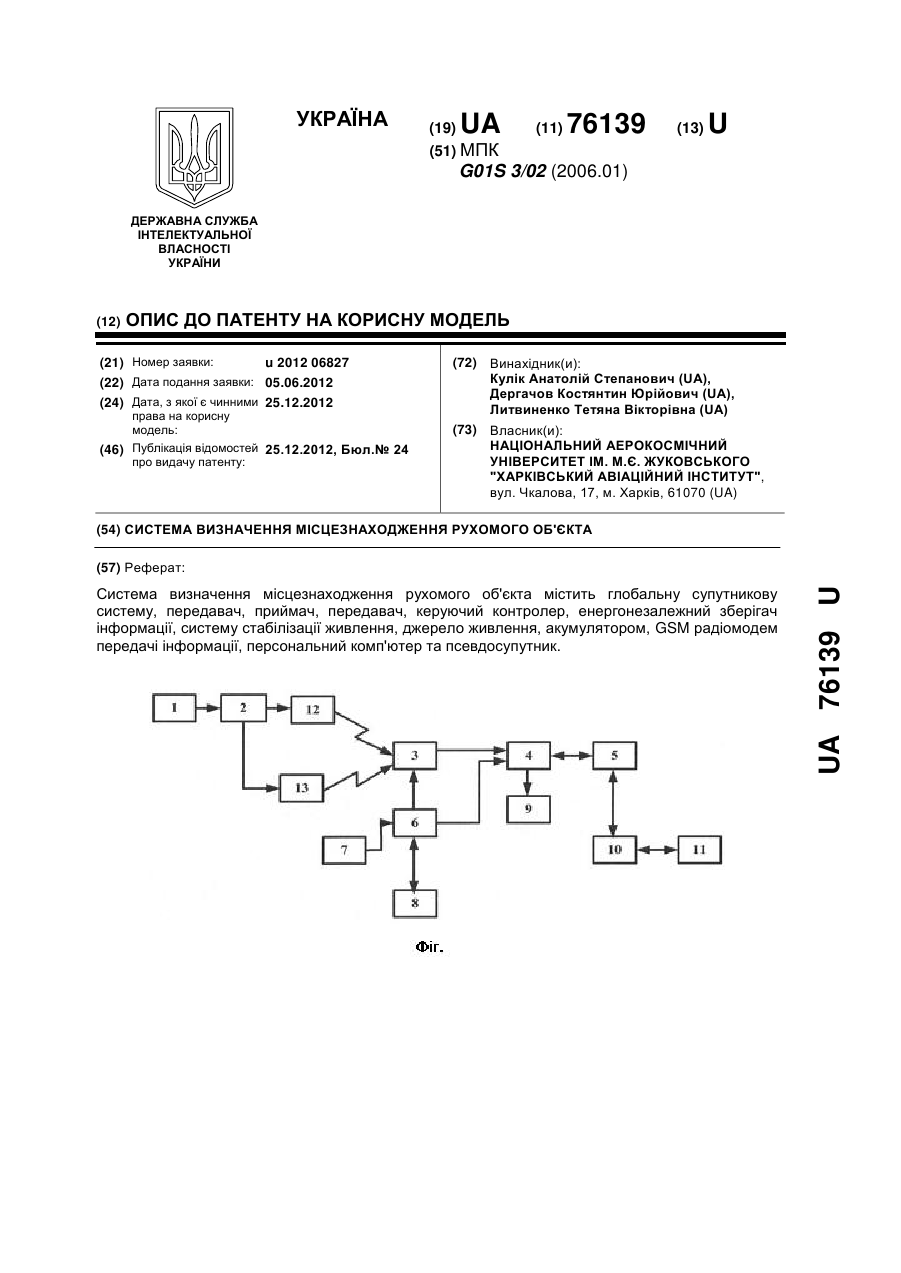
Реферат: Автоматизована інтелектуальна транспортна система містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаний з глобальною супутниковою системою та керуючим контролером, джерело живлення та вбудовані акумуляторні батареї, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем інформації, бездротовий передавач/приймач інформації, входи та виходи якого з'єднані з керуючим контролером та центральною станцією, пристрій відображення цифрової картографічної інформації, вхід якого з'єднаний з керуючим контролером, цифрова карта місцевості. Введені блок додаткових картографічних даних про стан доріг на вхід якого підключена цифрова карта місцевості, а вихід з'єднаний з центральною станцією, блок формування поточної інформації про завантаження доріг, вхід якого з'єднаний з мережею відеокамер, а вихід з блоком додаткових картографічних даних про стан доріг, блок аналізу інформації про стан доріг наданої користувачем, вхід якого з'єднаний з виходом центральної станції, а вихід підключений до блока додаткових картографічних даних про стан доріг, блок вводу інформації про стан дороги від користувача, вихід якого з'єднаний з керуючим контролером. UA 88529 U (54) АВТОМАТИЗОВАНА ІНТЕЛЕКТУАЛЬНА ТРАНСПОРТНА СИСТЕМА UA 88529 U UA 88529 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі навігації та може бути використана для здійснення контролю за переміщенням рухомих об'єктів, таких як автотранспорт, військова техніка, водний транспорт, транспортні засоби міських комунальних служб та підвищення безпеки їхнього руху. Найбільш близькою є автоматизована система побудови оптимального маршруту руху транспортного агрегату [Пат. України № 53723. опубл. 11.10.2010, Бюл. № 19, 2010 p.], що містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудовані акумуляторні батареї, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем інформації, центральну станцію, бездротовий передавач/приймач інформації, входи і виходи якого зв'язані з керуючим контролером та центральною станцією, пристрій відображення цифрової картографічної інформації, вхід якого з'єднаний з керуючим контролером, цифрова карта місцевості, вихід якої з'єднаний зі входом центральної станції. Недоліком даної системи є відсутність можливості урахування рівня завантаженості доріг для розрахунку раціонального маршруту руху. В основу корисної моделі поставлено задачу аналізу та врахування рівня завантаженості доріг, що дозволить підвищити безпеку руху, знизити енергетичні та часові витрати. Поставлена задача вирішується тим, що в автоматизовану інтелектуальну транспортну систему, що містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаний з глобальною супутниковою системою та керуючим контролером, джерело живлення та вбудовані акумуляторні батареї, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем інформації, бездротовий передавач/приймач інформації, входи та виходи якого з'єднані з керуючим контролером та центральною станцією, пристрій відображення цифрової картографічної інформації, вхід якого з'єднаний з керуючим контролером, цифрова карта місцевості, згідно з корисною моделлю, введені блок додаткових картографічних даних про стан доріг на вхід якого підключена цифрова карта місцевості, а вихід з'єднаний з центральною станцією, блок формування поточної інформації про завантаження доріг, вхід якого з'єднаний з мережею відеокамер, а вихід з блоком додаткових картографічних даних про стан доріг, блок аналізу інформації про стан доріг наданої користувачем, вхід якого з'єднаний з виходом центральної станції, а вихід підключений до блоку додаткових картографічних даних про стан доріг, блок вводу інформації про стан дороги від користувача, вихід якого з'єднаний з керуючим контролером. Запропоноване технічне рішення представлено на кресленні, де представлена блок-схема автоматизованої інтелектуальної системи. Інтелектуальна транспортна система містить приймач 1, приєднаний до рухомого транспортного об'єкта 2, зв'язаний із глобальною супутниковою системою 3 та керуючим контролером 4, джерело живлення 5 та вбудовані акумуляторні батареї 6, виходи яких з'єднані з підсистемою стабілізації живлення 7, виходи якої з'єднані з приймачем 1 та керуючим контролером 4, входи і виходи якого зв'язані з оперативною пам'яттю 8 та енергонезалежним зберігачем інформації 10, пристрій відображення цифрової картографічної інформації 9, вхід якого з'єднаний з керуючим контролером 4, блок вводу інформації про стан дороги від користувача 18, вихід якого з'єднаний з керуючим контролером 4, бездротовий передавач/приймач інформації 11, входи і виходи якого зв'язані з керуючим контролером 4 та центральною станцією 12, блок додаткових картографічних даних про стан доріг 13 вихід якого з'єднаний з центральною станцією 12, а входи з цифровою картою місцевості 14, з блоком формування поточної інформації про завантаженість доріг 16 та блоком аналізу інформації про стан доріг наданої користувачем 15, вхід якого зв'язано з центральною станцією 12, блок мережі відеокамер 17, вихід якого зв'язаний з блоком формування поточної інформації про завантаженість доріг 16. Запропонована система працює таким чином. Керуючий контролер 4 приймає інформацію про рухомий об'єкт 2 від приймача 1, який, в свою чергу, вираховує данні згідно з сигналами глобальної супутникової системи 3. Керуючий контролер 4 перетворює прийняту цифрову інформацію про координати рухомого об'єкту у формат, необхідний для пристрою відображення цифрової картографічної інформації 9 та подальшої її передачі на центральну станцію 12. Живлення системи здійснюється через джерело живлення 5 або через вбудовані акумуляторні батареї 6. Керуючий контролер 4 фіксує визначені поточні координати рухомого об'єкта 2, а також якість прийнятих сигналів від глобальної супутникової системи 3. Керуючий контролер 4 фіксує інформацію з блока вводу 1 UA 88529 U 5 10 15 20 інформації про стан доріг від користувача 18. Для зберігання тимчасової інформації, що використовується при розрахунках у керуючому контролері 4, використовується оперативна пам'ять 8. Інформація про час, координати, якість функціонування приймача 1 та інформація про стан доріг, надана за допомогою блока вводу інформації про стан доріг від користувача 18, передається за допомогою бездротового передавача/приймача інформації 11 на центральну станцію 12. Центральна станція 12 ретранслює інформацію про стан доріг, яка надана за допомогою блоку вводу інформації про стан доріг від користувача 18, на блок аналізу інформації про стан доріг наданої користувачем 15. Блок аналізу інформації про стан доріг наданої користувачем 15 формує додаткову картографічну інформацію, що відповідає вимогам достовірності, і передає її на блок додаткових картографічних даних 13. Блок формування поточної інформації про завантаженість доріг 16 отримує інформацію з блока мережі відеокамер 17 та формує додаткову картографічну інформацію і передає її на блок додаткових картографічних даних 13. Блок додаткових картографічних даних 13 отримає цифрову картографічну інформацію з цифрової карти місцевості 14 та доповнює її додатковою інформацією з блоку аналізу інформації про стан доріг наданої користувачем 15 і блоку формування поточної інформації про завантаженість доріг 16 та передає її до центральної системи 12, яка в свою чергу відбирає дані згідно з прийнятими координатами місцезнаходження рухомого об'єкта, розраховує раціональний маршрут та передає данні доповненої картографічної інформації і дані точок розрахованого маршруту до керуючого контролера 4 за допомогою бездротового передавача/приймача інформації 11 для відображення переданої інформації на пристрій відображення цифрової картографічної інформації 9. Таким чином система володіє більшою кількістю джерел інформації для розрахунку оптимального маршруту транспортного об'єкта. 25 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 Автоматизована інтелектуальна транспортна система, що містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаний з глобальною супутниковою системою та керуючим контролером, джерело живлення та вбудовані акумуляторні батареї, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем інформації, бездротовий передавач/приймач інформації, входи та виходи якого з'єднані з керуючим контролером та центральною станцією, пристрій відображення цифрової картографічної інформації, вхід якого з'єднаний з керуючим контролером, цифрова карта місцевості, яка відрізняється тим, що, введені блок додаткових картографічних даних про стан доріг на вхід якого підключена цифрова карта місцевості, а вихід з'єднаний з центральною станцією, блок формування поточної інформації про завантаження доріг, вхід якого з'єднаний з мережею відеокамер, а вихід з блоком додаткових картографічних даних про стан доріг, блок аналізу інформації про стан доріг наданої користувачем, вхід якого з'єднаний з виходом центральної станції, а вихід підключений до блока додаткових картографічних даних про стан доріг, блок вводу інформації про стан дороги від користувача, вихід якого з'єднаний з керуючим контролером. 2 UA 88529 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюKulik Anatolii Stepanovych, Derhachov Kostiantyn Yuriiovych
Автори російськоюКулик Анатолий Степанович, Дергачев Константин Юрьевич
МПК / Мітки
МПК: G01S 3/02
Мітки: транспортна, система, інтелектуальна, автоматизована
Код посилання
<a href="https://ua.patents.su/5-88529-avtomatizovana-intelektualna-transportna-sistema.html" target="_blank" rel="follow" title="База патентів України">Автоматизована інтелектуальна транспортна система</a>
Автоматизована інтелектуальна транспортна система
Номер патенту: 78878
Опубліковано: 10.04.2013
Автори: Дергачев Костянтин Юрійович, Харіна Наталія Миколаївна, Бортник Христина Романівна, Кулік Анатолій Степанович
МПК: G01S 3/02
Мітки: система, транспортна, інтелектуальна, автоматизована
Формула / Реферат:
Автоматизована інтелектуальна транспортна система, що містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаний з глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем інформації,...
Автоматизована система побудови оптимального маршруту руху транспортного агрегату
Номер патенту: 53723
Опубліковано: 11.10.2010
Автори: Грібков Антон Євгенович, Дергачов Костянтин Юрійович, Морозов Володимир Володимирович, Кулік Анатолій Степанович
МПК: G01S 3/02
Мітки: система, агрегату, транспортного, побудови, автоматизована, маршруту, оптимального, руху
Формула / Реферат:
Автоматизована система побудови оптимального маршруту руху транспортного агрегату, що містить приймач, приєднаний до рухомого об'єкта, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним...
Система автоматичного виявлення місцезнаходження рухомого об’єкта
Номер патенту: 55408
Опубліковано: 10.12.2010
Автори: Дергачов Костянтин Юрійович, Сосницький Віталій Валерійович, Кулік Анатолій Степанович
МПК: G01S 3/02
Мітки: автоматичного, місцезнаходження, об'єкта, система, рухомого, виявлення
Формула / Реферат:
Система автоматичного виявлення місцезнаходження рухомого об'єкта, яка містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід...
Автоматизована система пошуку оптимального покриття
Номер патенту: 20835
Опубліковано: 15.02.2007
Автори: Дергачова Ганна Володимирівна, Доценко Наталія Володимирівна, Чумаченко Ігор Володимирович, Шипулін Олексій Ігорович
МПК: G06F 17/00
Мітки: покриття, система, автоматизована, оптимального, пошуку
Формула / Реферат:
Автоматизована система пошуку оптимального покриття, що містить двійковий лічильник, блок пам'яті, виходи результату, групу інформаційних входів, два виходи пристрою, керуючий вхід, елемент І, причому виходи двійкового лічильника з'єднані з адресними входами блока пам'яті, групу керуючих входів, яка відрізняється тим, що містить k груп керуючих входів, k блоків множення векторів, k порогових елементів, блок керування, виходи рішень, причому...
Система визначення місцезнаходження рухомого об’єкта
Номер патенту: 76139
Опубліковано: 25.12.2012
Автори: Кулік Анатолій Степанович, Дергачов Костянтин Юрійович, Литвиненко Тетяна Вікторівна
МПК: G01S 3/02
Мітки: визначення, об'єкта, місцезнаходження, рухомого, система
Формула / Реферат:
Система визначення місцезнаходження рухомого об'єкта, що містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід - з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з...
Попередній патент: Спосіб сепарації з додатковим очищенням зернового матеріалу
Наступний патент: Пристрій збору та обробки інформації в автоматизованій системі керування повітряним рухом
Випадковий патент: Комбінований лікарський засіб на основі ехінацеї пурпурової