Спосіб управління процесом завантаження зерна на судно через гравітаційну трубу
Номер патенту: 95336
Опубліковано: 25.12.2014
Автори: Хобін Віктор Андрійович, Басараб Олександр Васильович
Формула / Реферат
1. Спосіб управління процесом завантаження зерна на судно через гравітаційну трубу, який включає регулювання швидкості потоку зерна зміненням положення засувки на кінці гравітаційної труби, який відрізняється тим, що додатково вимірюють фактичне значення маси гравітаційної труби з зерном і стабілізують значення цієї маси на рівні її заданого значення розрахунком керуючої дії на зміну положення засувки подачі зерна на судно.
2. Спосіб за п. 1, який відрізняється тим, що задане значення маси гравітаційної труби з зерном задають, виходячи з умов мінімізації швидкості витоку зерна - максимальної завантаженості труби зерном.
3. Спосіб за п. 1, який відрізняється тим, що задане значення маси гравітаційної труби з зерном, розраховують за формулою:
![]() ,
,
де ![]() ,
, ![]() ,
, ![]() - вага пустої гравітаційної труби на трьох розбитих ділянках;
- вага пустої гравітаційної труби на трьох розбитих ділянках;
![]() ,
, ![]() ,
, ![]() - відстань до їх центра мас, які необхідні для подальшого розрахунку сумарного моменту;
- відстань до їх центра мас, які необхідні для подальшого розрахунку сумарного моменту;
![]() - відстань до місця закріплення троса, який тримає гравітаційну трубу;
- відстань до місця закріплення троса, який тримає гравітаційну трубу;
![]() - прискорення вільного падіння;
- прискорення вільного падіння;
![]() - кут нахилу гравітаційної труби;
- кут нахилу гравітаційної труби;
![]() - заданий рівень зерна у гравітаційній трубі;
- заданий рівень зерна у гравітаційній трубі;
![]() - насипна густина зерна;
- насипна густина зерна;
![]() - площа поперечного перерізу гравітаційної труби для руху зерна.
- площа поперечного перерізу гравітаційної труби для руху зерна.
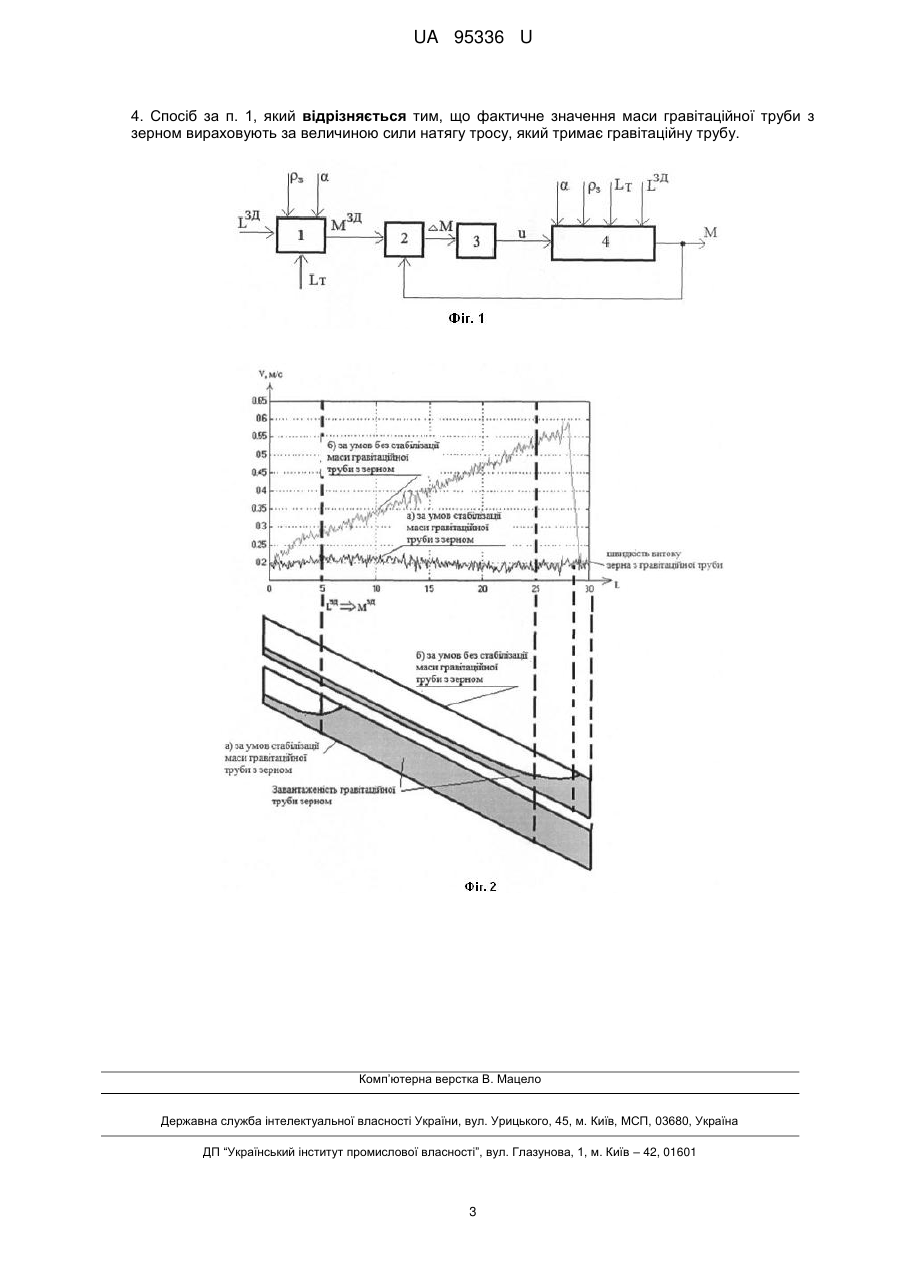
4. Спосіб за п. 1, який відрізняється тим, що фактичне значення маси гравітаційної труби з зерном вираховують за величиною сили натягу тросу, який тримає гравітаційну трубу.
Текст
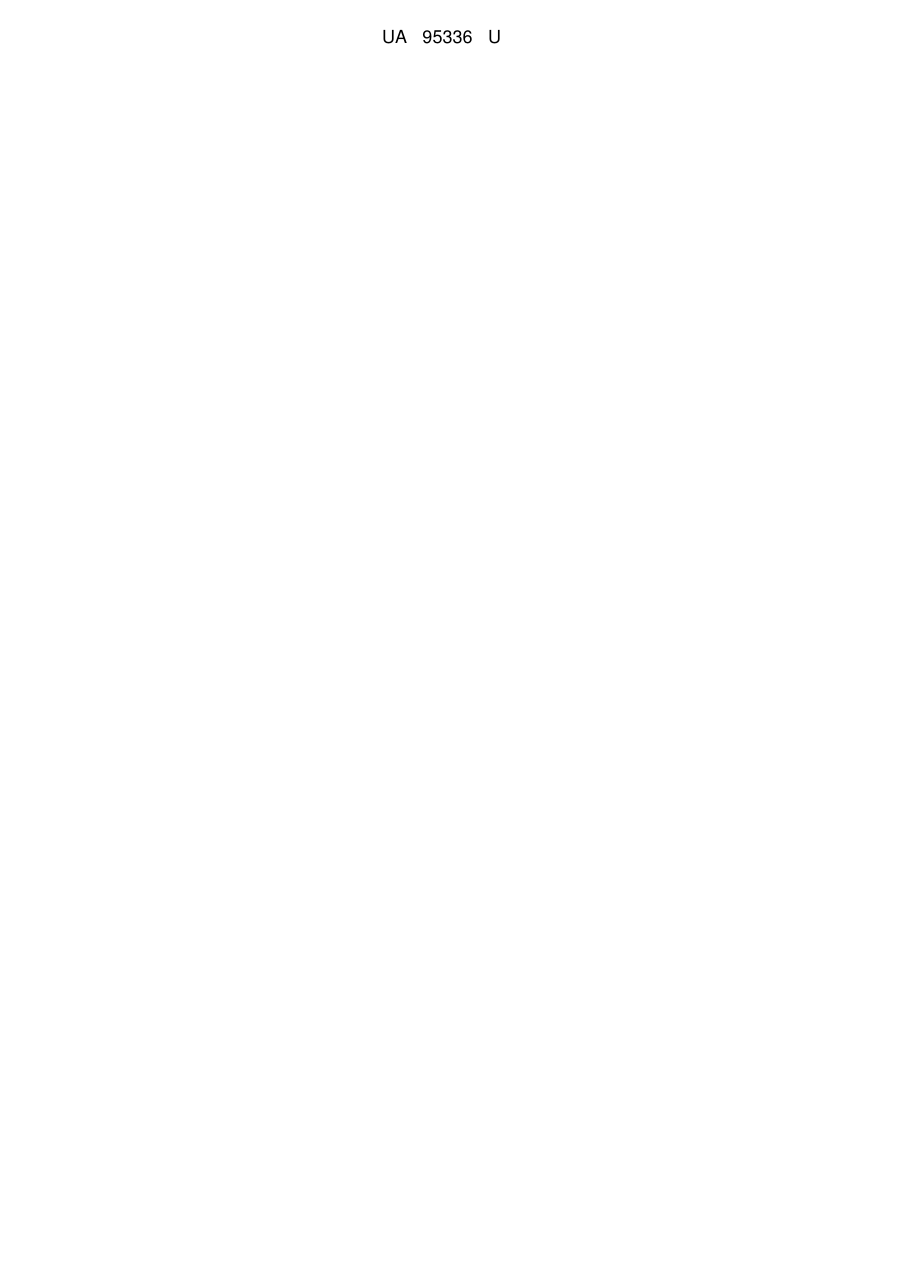
Реферат: UA 95336 U UA 95336 U 5 10 15 20 25 30 35 Корисна модель належить до технології перевантаження зерна з місць зберігання та транспортування, зокрема до автоматичного управління процесом завантаження зерна на судно через гравітаційну трубу. Запропонований спосіб знайде використання при перевантаженні зернових культур на зернових терміналах. Відомий спосіб управління процесом завантаження зерна на судно, завдяки звичайному жолобу, з'єднаному з люком трюму та елеватором [Патент России № 35677, МПК В63В25/06, С.В. Андреева, Устройство для загрузки зерном трюма судна, 1993]. Недоліком цього способу є те, що в ньому не регулюють швидкість потоку зерна, що призводить до великого стирання зерна і матеріалу жолобу, а також великого виділення пилу при ударі зерна в трюм судна, а також підвищення кількості пошкоджених зерен. Найбільш близьким до пропонованого, який вибраний як прототип, є спосіб управління процесом завантаження зерна на судно через гравітаційну трубу, який включає регулювання швидкості потоку зерна на виході з труби зміненням положення засувки на кінці гравітаційної труби [Инструкция по эксплуатации и техническому обслуживанию, NEUERO К100001 НИБУЛОН Николаев, Украина, 2001]. Відповідно до даного способу, здійснюється регулювання швидкості витоку зерна з гравітаційної труби, за рахунок змінення положення засувки на кінці гравітаційної труби. Недоліком цього способу є те, що він не дозволяє мінімізувати швидкість руху зерна у самій гравітаційній трубі і витоку зерна з труби. Це може призвести до підвищеного зношення внутрішньої поверхні гравітаційної труби, з якою контактує зерно, підвищеного зношення зерна з виділенням пилу, підвищеною швидкістю витоку зерна з гравітаційної труби і його падінням в трюм судна, яке супроводжується підвищеним виділенням пилу, погіршенням екологічної ситуації, а також підвищення кількості пошкоджених зерен. Заявлений спосіб має задачу створити запропонований спосіб управління процесом завантаження зерна на судно через гравітаційну трубу, у якому, шляхом виконання додаткових операцій, а саме вимірювання фактичного значення маси гравітаційної труби з зерном, яке може бути вирахуване за величиною натягу троса, що тримає гравітаційну трубу, і стабілізації цієї маси на рівня її заданого значення, забезпечити підвищення якості зерна та зниження ймовірності виникнення аварійних ситуацій. Поставлена задача вирішена в запропонованому способі управління процесом завантаження зерна на судно через гравітаційну трубу, що включає мінімізацію швидкості потоку зерна в трубі шляхом зміненням положення засувки на кінці гравітаційної труби, згідно з корисною моделлю, додатково вимірюють фактичну масу гравітаційної труби з зерном. Задане значення маси гравітаційної труби з зерном задають, виходячи з умов мінімізації швидкості витоку зерна - максимальної завантаженості труби зерном. Задане значення маси гравітаційної труби з зерном може бути розраховано за формулою 1: Mзд 40 45 F1 L1 F2 L 2 F3 L 3 Ln 2 g cos Lзд з S (1), де F , F2 , F3 - вага пустої гравітаційної труби на трьох розбитих ділянках; 1 , L 2 , L3 - відстань до їх центра мас, які необхідні для подальшого розрахунку сумарного L1 моменту; L n - відстань до місця закріплення троса, який тримає гравітаційну трубу; g - прискорення вільного падіння; - кут нахилу гравітаційної труби; Lзд - заданий рівень зерна у гравітаційній трубі; з - насипна густина зерна; S - площа поперечного перерізу гравітаційної труби для руху зерна; F (LT k1) c g S1 1 (2) F2 (k 2 LT ) c g S2 (3) F3 (LT k3 ) c g S3 (4) 50 1 UA 95336 U L1 (LT k1) 0.5 cos (5) L2 (k 4 (k1 LT ) 0.5) cos (6) L3 ((LT k з ) 0.5 k 4 ) cos (7), 10 де: L T - довжина висунутого телескопа; k 1 , k 2 , k 3 - поправочні коефіцієнти; S1 , S2 , S3 - площа поперченого перерізу сталі гравітаційної труби на трьох розбитих ділянках. Приклад реалізації, запропонований спосіб управління процесом завантаження зерна на судно через гравітаційну трубу ілюструється структурною схемою, показаною на Фіг. 1 та Фіг. 2. На Фіг. 1 зображені наступні вузли й елементи: 15 1 - блок розрахунку заданого значення маси Mзд ; 2 - суматор; 3 - регулятор; 4 - гравітаційна труба. Послідовний ланцюг з'єднується зліва направо складовими: блок розрахунку заданого 5 20 25 значення маси Mзд 1, суматор 2, регулятор 3, гравітаційна труба 4; Зворотній ланцюг з'єднується справа наліво складовими: гравітаційна труба 4, суматор 2; Фіг. 2 ілюструє зміну швидкості руху зерна в гравітаційній трубі по її довжині, а також завантаженість гравітаційної труби зерном для двох варіантів управління завантажувальною засувкою. Управління процесом завантаження зерна на судно здійснюється наступним чином. Фактичне значення маси М гравітаційної труби з зерном, яке вираховують за величиною сили натягу тросу, який тримає гравітаційну трубу, вимірюють та подають на вхід у суматор 2, куди також надходить сигнал заданого її значення Mзд . Далі в результаті операції віднімання в суматорі 2, сигнал похибки регулювання M подають на регулятор 3, який формує керуючу дію і яка надходить до засувки гравітаційної труби 4, і тим самим максимально завантажує трубу зерном. На виході труби формується поточне значення маси М. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 1. Спосіб управління процесом завантаження зерна на судно через гравітаційну трубу, який включає регулювання швидкості потоку зерна зміненням положення засувки на кінці гравітаційної труби, який відрізняється тим, що додатково вимірюють фактичне значення маси гравітаційної труби з зерном і стабілізують значення цієї маси на рівні її заданого значення розрахунком керуючої дії на зміну положення засувки подачі зерна на судно. 2. Спосіб за п. 1, який відрізняється тим, що задане значення маси гравітаційної труби з зерном задають, виходячи з умов мінімізації швидкості витоку зерна - максимальної завантаженості труби зерном. 3. Спосіб за п. 1, який відрізняється тим, що задане значення маси гравітаційної труби з зерном, розраховують за формулою: Mзд 45 50 F1 L1 F2 L 2 F3 L3 Ln 2 g cos Lзд з S , де F1 , F2 , F3 - вага пустої гравітаційної труби на трьох розбитих ділянках; L 1 , L 2 , L 3 - відстань до їх центра мас, які необхідні для подальшого розрахунку сумарного моменту; L n - відстань до місця закріплення троса, який тримає гравітаційну трубу; g - прискорення вільного падіння; - кут нахилу гравітаційної труби; Lзд - заданий рівень зерна у гравітаційній трубі; з - насипна густина зерна; S - площа поперечного перерізу гравітаційної труби для руху зерна. 2 UA 95336 U 4. Спосіб за п. 1, який відрізняється тим, що фактичне значення маси гравітаційної труби з зерном вираховують за величиною сили натягу тросу, який тримає гравітаційну трубу. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюKhobin Viktor Andriiovych
Автори російськоюХобин Виктор Андреевич
МПК / Мітки
МПК: B65G 67/60
Мітки: трубу, зерна, судно, процесом, гравітаційну, управління, завантаження, спосіб
Код посилання
<a href="https://ua.patents.su/5-95336-sposib-upravlinnya-procesom-zavantazhennya-zerna-na-sudno-cherez-gravitacijjnu-trubu.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління процесом завантаження зерна на судно через гравітаційну трубу</a>
Спосіб автоматичного управління процесом зволоження зерна
Номер патенту: 52710
Опубліковано: 10.09.2010
Автори: Кирилов Віталій Олександрович, Павлов Артур Іванович
МПК: B02B 1/00
Мітки: спосіб, автоматичного, зерна, зволоження, процесом, управління
Формула / Реферат:
Спосіб автоматичного управління процесом зволоження зерна, що передбачає вимірювання витрати зерна, яке направляють до зволожувального шнека, вимірювання та регулювання витрати води, яку використовують для зволоження, який відрізняється тим, що для підтримання вологості зерна на заданому значенні додатково вимірюють первинну вологість зерна (вологість зерна до зволоження), вологість зерна після бункера відволожування, виконують розрахунок...
Спосіб автоматичного управління процесом сушіння зерна в шахтній зерносушарці
Номер патенту: 78873
Опубліковано: 10.04.2013
Автор: Дзюба Костянтин Володимирович
МПК: F26B 25/22, G05D 23/00
Мітки: сушіння, зерносушарці, спосіб, процесом, шахтній, управління, автоматичного, зерна
Формула / Реферат:
Спосіб автоматичного управління процесом сушіння зерна в шахтній зерносушарці, який включає вимірювання та регулювання температур зерна, зміною температури сушильного агента, вимірювання вологості зерна на виході із сушарки, який відрізняється тим, що додатково компенсують внутрішні взаємозв’язки каналів управління температурою зерна за рахунок введення коректуючих зв'язків у контури управління.
Спосіб автоматичного управління процесом дроблення зерна в молотковій дробарці
Номер патенту: 62974
Опубліковано: 26.09.2011
Автори: Дмитрук Артем Володимирович, Плєве Олександр Георгієвич
МПК: B02C 25/00
Мітки: дроблення, спосіб, зерна, процесом, автоматичного, дробарці, управління, молотковий
Формула / Реферат:
Спосіб автоматичного управління процесом дроблення зерна в молотковій дробарці, що включає вимірювання струму навантаження електроприводу дробарки, її продуктивності, стабілізацію струму навантаження електроприводу за допомогою регулятора навантаження шляхом зміни витрати матеріалу в дробарку залежно від встановленого завдання і міри завантаження дробарки і екстремальне регулювання продуктивності дробарки за допомогою екстремального...
Спосіб автоматичного керування процесом подрібнення зерна
Номер патенту: 71763
Опубліковано: 25.07.2012
Автори: Казюк Віктор Володимирович, Муратов Віктор Георгійович
МПК: B02C 4/00
Мітки: подрібнення, зерна, автоматичного, керування, спосіб, процесом
Формула / Реферат:
Спосіб автоматичного керування процесом подрібнення зерна, який складається з вимірювання і сигналізації рівня зерна у приймальному бункері, вимірювання і регулювання струму навантаження електродвигуна валкового станку шляхом зміни положення регулюючого шиберу в трубопроводі подачі зерна на помел, вимірювання і регулювання дисперсності помелу зерна шляхом зміни зазору між валками, вимірювання і регулювання витрати борошна вищого ґатунку на...
Спосіб автоматичного керування процесом сушіння зерна
Номер патенту: 72559
Опубліковано: 27.08.2012
Автори: Воінова Світлана Олександрівна, Аккерман Дмитро Миколайович
МПК: B02B 1/08
Мітки: сушіння, зерна, спосіб, автоматичного, процесом, керування
Формула / Реферат:
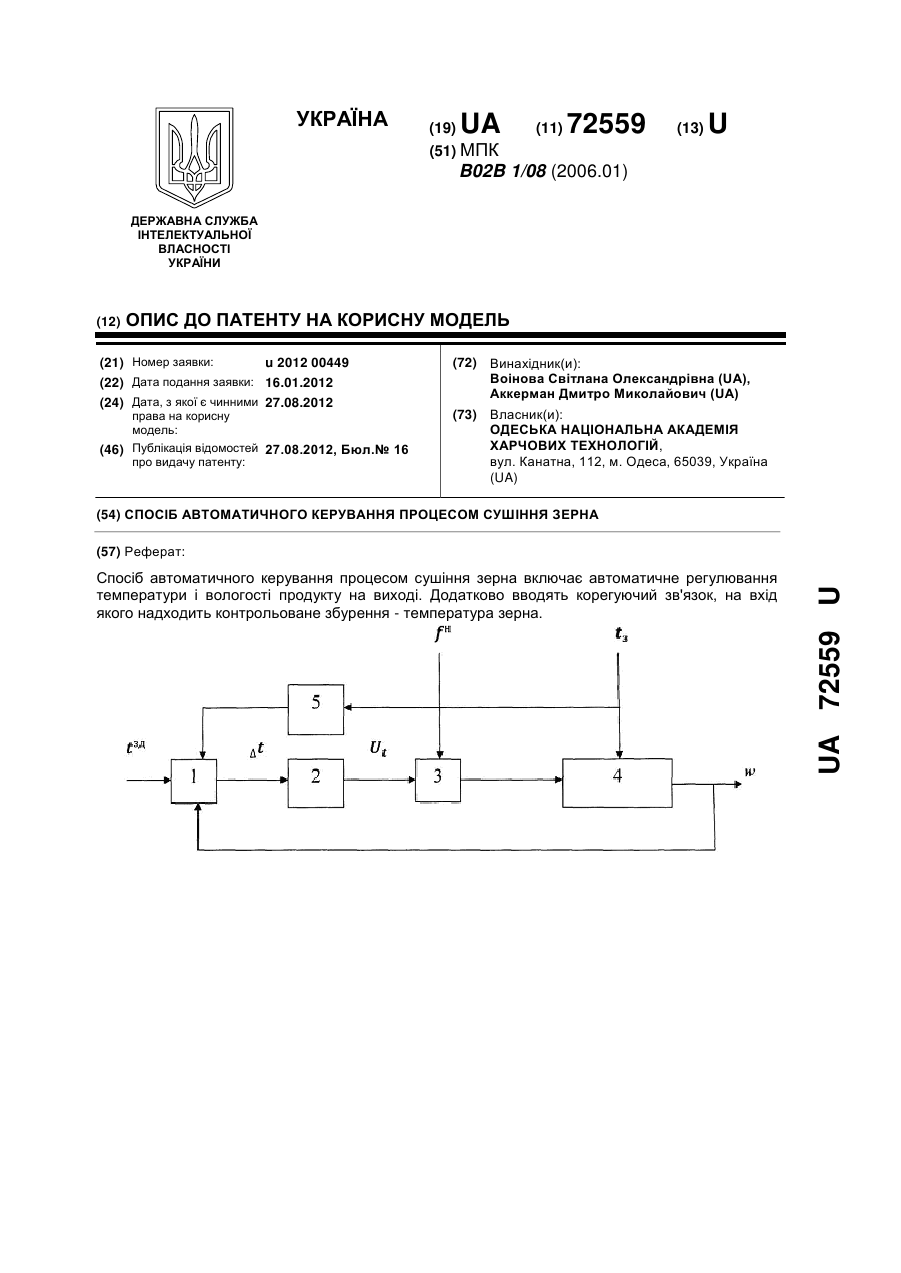
Спосіб автоматичного керування процесом сушіння зерна, який включає автоматичне регулювання температури і вологості продукту на виході, який відрізняється тим, що вводять корегуючий зв'язок, на вхід якого надходить контрольоване збурення - температура зерна, що забезпечує інваріантність системи до контрольованого збурення, чим підвищується динамічна точність управління.
Попередній патент: Спосіб виготовлення чутливого елемента терморезистора
Наступний патент: Кінцевий кран
Випадковий патент: Індикатор напруги