Система компенсаційного автоматичного управління курсом судна
Номер патенту: 96302
Опубліковано: 26.01.2015
Автори: Львов Володимир Євгенович, Голіков Володимир Володимирович, Костенко Павло Анатолійович, Мальцев Анатолій Сідорович
Формула / Реферат
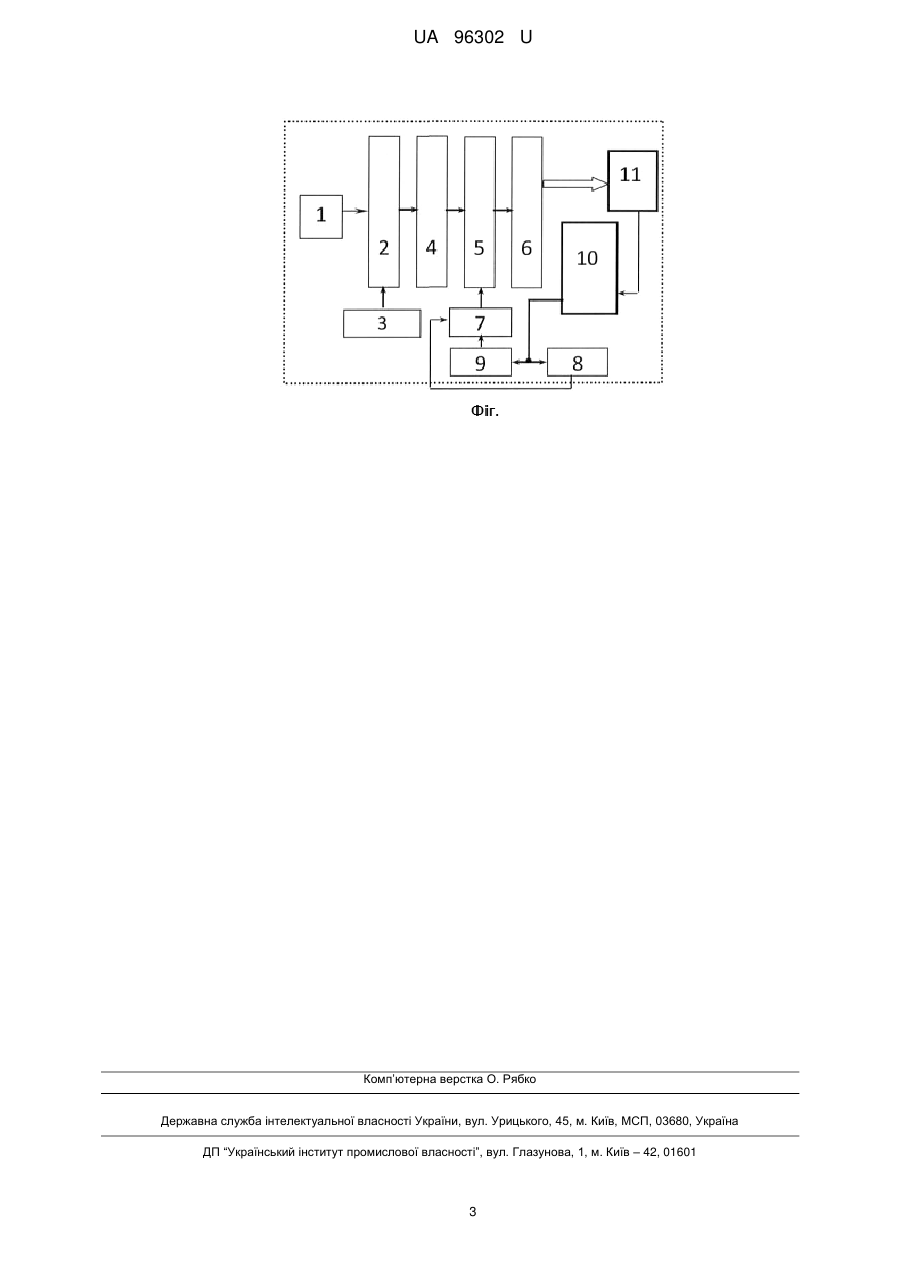
Система компенсаційного автоматичного управління курсом судна, що включає блок даних про заданий курс, з'єднаний з блоком порівняння заданого і текучого курсу, який зв'язаний з блоком текучого курсу та інформаційно-керуючим пристроєм, що зв'язаний з рульовим приводом, який з'єднаний з об'єктом управління (корпусом судна), датчики параметрів вітру та хвилювання, яка відрізняється тим, що додатково містить блок розрахунку кута компенсацій від вітру та блок розрахунку кута компенсацій від хвилювання, які з'єднані між собою, кожний з цих блоків пов'язаний з блоком розрахунку кута компенсації рульового приводу, з датчиками параметрів вітру та хвилювання, які в свою чергу зв'язані з індикатором курсу і швидкості, що з'єднаний з об'єктом управління.
Текст
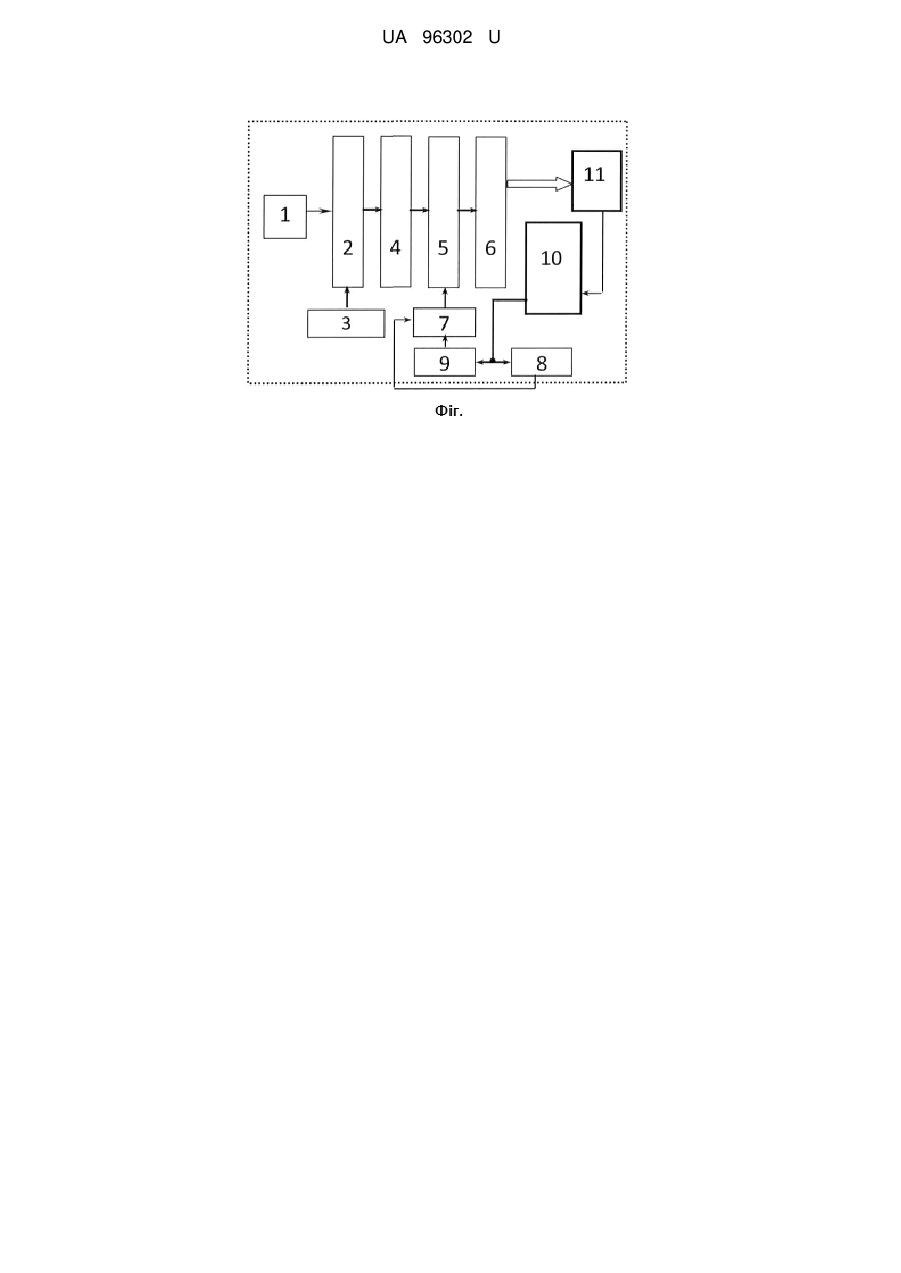
Реферат: Система компенсаційного автоматичного управління курсом судна включає блок даних про заданий курс, з'єднаний з блоком порівняння заданого і текучого курсу, який зв'язаний з блоком текучого курсу та інформаційно-керуючим пристроєм, що зв'язаний з рульовим приводом, який з'єднаний з об'єктом управління (корпусом судна), датчики параметрів вітру та хвилювання. Додатково містить блок розрахунку кута компенсацій від вітру та блок розрахунку кута компенсацій від хвилювання, які з'єднані між собою. Кожний з цих блоків пов'язаний з блоком розрахунку кута компенсації рульового приводу, з датчиками параметрів вітру та хвилювання, які в свою чергу зв'язані з індикатором курсу і швидкості, що з'єднаний з об'єктом управління. UA 96302 U (12) UA 96302 U UA 96302 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до судноводіння, а саме до систем компенсаційного автоматичного управління курсом судна, і використовується для реалізації оптимального управління курсом судна в умовах перемінних зовнішніх впливів за рахунок зменшення числа і кута перекладки руля, що підвищує надійність роботи системи в складних і штормових умовах плавання. Зовнішні дії вітер, течія (знос від вітрового, приливного або постійного течій), хвилювання (слеммінг, заливаємість), а також тимчасові взаємодії (з судами при обгоні і розбіжностей на невеликих відстанях, з причалами, стінками каналів і фарватерів, дном моря) впливають на судно і викликають його зміщення відносно лінії заданого шляху. У наслідок цього відбувається втрата керованості судна і виникають передумови для виникнення аварійної ситуації аж до виникнення аварії. Відома система управління курсом і положенням судна (Вагущенко Л.Л., Цимбал Н.Н. Системы автоматического управления движением судoв: Учебник. - О.: Фенікс. - М.: ТрансЛит, 2007.- С. 240-253), яка включає задатчик курсу, інформаційно-керуючий пристрій, засіб управління, об'єкт управління, систему планування траєкторії, пристрій поточних координат. Недоліками даної системи є те, що склад апаратури не є повним і оптимальним для реалізації потенційних функціональних можливостей системи, що призводить до частої перекладки руля на великий кут, перевантаження рульового пристрою і недостатнього забезпечення точності утримання судна на заданому курсі та недостатньої експлуатаційної надійності і, як наслідок, знижується безпека судноводіння. Найбільш близьким до заявленого є система автоматичного керування рухом судна (Патент РФ № 2463205, заявка 2011101304/11, приор. 13.01.2011, опубл. 10.10.12, МПК 9 В63Н 25/04), яка включає блок вимірювачів параметрів руху судна (ВПРС), блок датчиків зовнішніх дій (ДЗД), блок об'єктів управління (ОУ), інформаційні виходи яких підключені до обчислювального блока (ОБ), також блок управління, пов'язаний інформаційно-керуючим входом-виходом з ОБ, причому блок ВПРС включає блок суднових навігаційних приладів (СНП) у складі ехолота, лагу і гірокомпаса, навігаційну станцію радіолокації (НРЛС) і навігаційний модуль (НМ) у вигляді прийомоіндикатора супутникової навігаційної системи (СНС), блок ДЗД включає датчик параметрів на вітер і хвилювання, блок ОУ включає об'єкти управління у вигляді суднових рушіїв і рульового пристрою з підключеними до них датчиками ОУ (ДОУ), обчислювальний блок ОБ включає контролер, блок програмного забезпечення (ПЗ) і центральний процесор (ЦП), при цьому до входів контролера підключені інформаційні виходи блоків ВПРС, ДЗД і ОУ, а виходи контролера і блока ПЗ підключені до входу ЦП, який виконаний з можливістю порівняння поточних параметрів руху судна із заданими програмними значеннями і формування за результатами цього порівняння керуючих сигналів на ОУ. Недоліками даної системи є відсутність блоків розрахунку кутів дрейфу від вітру та хвилі та врахування їх під час перекладки руля, що не дозволяє оптимізувати роботу рульового пристрою, а навігаційні пристрої, що використовуються, не впливають на якість утримання судна на курсі взагалі, що знижує надійність роботи системи в складних і штормових умовах плавання. В основу корисної моделі поставлено задачу удосконалення системи компенсаційного автоматичного управління курсом судна, в якій шляхом додаткового введення блока текучого курсу, блока розрахунку кута компенсацій від вітру, блока розрахунку кута компенсацій від хвилювання, блока розрахунку кута компенсації рульового приводу, індикатора курсу і швидкості, що дозволяє забезпечити зменшення навантаження на двигун рульового приводу і підвищити надійності роботи системи в складних і штормових умовах плавання та знизити ризики виникнення непередбачених аварійних ситуацій. Поставлена задача вирішується тим, що у відомій системі компенсаційного автоматичного управління курсом судна, що включає блок даних про заданий курс, блок порівняння заданого і текучого курсу, блок текучого курсу, інформаційно-керуючий пристрій, рульовий привід, об'єкт управління, датчики параметрів вітру та хвилювання, згідно з корисною моделлю, система додатково містить блок розрахунку кута компенсацій від вітру, блок розрахунку кута компенсацій від хвилювання, блок розрахунку кута компенсації рульового приводу, індикатора курсу і швидкості. Причинно-наслідковий зв'язок між сукупністю ознак, що заявляються, та технічним результатом полягає у наступному. Блок розрахунку кута компенсацій від вітру визначає кут компенсації зовнішнього впливу і забезпечує перекладку керма на указаний кут, що зменшує частоту перекладки руля і його маніпуляції навколо указаного кута, що підвищує надійність роботи системи в складних і штормових умовах плавання. 1 UA 96302 U 5 10 15 20 25 30 35 Блок розрахунку кута компенсацій від хвилювання забезпечує вимірювання курсового кута та висоту хвилі та своєчасне визначення інформації про кут дрейфу судна від хвилі, що підвищує надійність роботи системи в штормових умовах плавання та знижує ризики виникнення непередбачених аварійних ситуацій. Блок розрахунку кута компенсації рульового приводу забезпечує визначення постійного кута перекладки руля для оптимізації роботи рульового приводу. Індикатор курсу і швидкості забезпечує інформацію про вплив вітру та хвилі на напрям руху і швидкість руху судна. Суть корисної моделі пояснюється кресленням. На кресленні зображена структурна схема системи компенсаційного автоматичного управління курсом судна. Система компенсаційного автоматичного управління курсом судна містить блок даних про заданий курс 1, з'єднаний з блоком порівняння заданого і текучого курсу 2, який зв'язаний з блоком текучого курсу 3 та інформаційно-керуючим пристроєм 4, що зв'язаний з рульовим приводом 5. Рульовий привід 5 з'єднаний з об'єктом управління (корпусом судна) 6 та блоком розрахунку кута компенсації рульового приводу 7. Блок розрахунку кута компенсації від вітру 8 та блок розрахунку кута компенсації від хвилювання 9 з'єднані між собою, кожний пов'язаний з блоком розрахунку кута компенсації рульового приводу 7, з датчиками параметрів вітру та хвилювання 10, що в свою чергу зв'язані з індикатором курсу і швидкості 11, який з'єднаний також з об'єктом управління 6. Пристрій компенсаційного автоматичного управління курсом судна працює наступним чином. При надходженні до блока даних про заданий курс 1 від системи планування рейсу ККзад дані надходять у блок порівняння 2, сюди ж надходять дані про текучий курс від блока 3, в результаті виробляється сигнал відхилення, який надходить на блок інформаційно-керуючого пристрою 4, який виробляє сигнал на рульовий привід 5. З датчиків параметрів вітру та хвилювання 10 дані надходять в блок розрахунку кута компенсації від вітру 8 та блок розрахунку кута компенсації від хвилювання 9, далі дані надходять в блок розрахунку кута компенсації рульового приводу 7, в якому розраховується кут компенсації рульового приводу і видається команда на рульовий привід 5 для перекладки руля на постійний кут для оптимізації управління курсом. Відповідно отриманих даних на рульовий привід 5 здійснюється управління корпусом судна 6. Застосування даного пристрою дозволить судноводію оптимізувати управління курсом судна, шляхом перекладки рульового пристрою на постійний кут, визначений з урахуванням впливу вітру і хвилювання і маніпуляції кермом навколо цього кута, що зменшує частоту, амплітуду і кут перекладки руля та вірогідність виникнення непередбачених аварійних ситуацій. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 Система компенсаційного автоматичного управління курсом судна, що включає блок даних про заданий курс, з'єднаний з блоком порівняння заданого і текучого курсу, який зв'язаний з блоком текучого курсу та інформаційно-керуючим пристроєм, що зв'язаний з рульовим приводом, який з'єднаний з об'єктом управління (корпусом судна), датчики параметрів вітру та хвилювання, яка відрізняється тим, що додатково містить блок розрахунку кута компенсацій від вітру та блок розрахунку кута компенсацій від хвилювання, які з'єднані між собою, кожний з цих блоків пов'язаний з блоком розрахунку кута компенсації рульового приводу, з датчиками параметрів вітру та хвилювання, які в свою чергу зв'язані з індикатором курсу і швидкості, що з'єднаний з об'єктом управління. 2 UA 96302 U Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюMaltsev Anatolii Sydorovych, Holikov Volodymyr Voldymyrovych
Автори російськоюМальцев Анатолий Сидорович, Голиков Владимир Владимирович
МПК / Мітки
МПК: B63H 25/00
Мітки: судна, компенсаційного, управління, система, курсом, автоматичного
Код посилання
<a href="https://ua.patents.su/5-96302-sistema-kompensacijjnogo-avtomatichnogo-upravlinnya-kursom-sudna.html" target="_blank" rel="follow" title="База патентів України">Система компенсаційного автоматичного управління курсом судна</a>
Система автоматичного керування рухом судна за курсом
Номер патенту: 54147
Опубліковано: 17.02.2003
Автор: Бугрім Леонід Іванович
МПК: B63H 25/00, B63B 49/00, B63B 45/00
Мітки: судна, курсом, керування, система, рухом, автоматичного
Формула / Реферат:
Система автоматичного керування рухом судна за курсом, що містить прилад керування, кермовий привід, у складі якого є виконавчий механізм, кермова машина, пристрій основного внутрішнього зворотного зв'язку, судно як об'єкт керування з пером керма, яка відрізняється тим, що в ній паралельно до виходу пристрою основного внутрішнього зворотного зв'язку установлено пристрій додаткового зворотного зв'язку і виходи пристроїв додаткового й основного...
Система автоматичного управління літаком при заході на посадку
Номер патенту: 94308
Опубліковано: 10.11.2014
Автори: Хлівнюк Ванда Олександрівна, Симонов Володимир Федорович, Субота Анатолій Максимович
МПК: B64C 13/16
Мітки: автоматичного, управління, посадку, система, літаком, заході
Формула / Реферат:
Система автоматичного управління літаком при заході на посадку, що містить у своєму складі антену, яка з'єднана з входом курсового радіоприймача, вихід якого з'єднаний з першим входом блока формування кута знесення, вихід якого з'єднаний з першим входом суматора, вихід якого через блок формування заданого кута крену з'єднаний з входом сервопривода вертикальної стрілки пілотажного приладу, вихід якого з'єднаний з входом індикатора пілотажного...
Система автоматичного управління випарною установкою
Номер патенту: 94930
Опубліковано: 10.12.2014
Автори: Кишенько Василь Дмитрович, Сич Марина Анатоліївна, Власенко Лідія Олександрівна
МПК: C13B 25/00
Мітки: установкою, система, випарною, управління, автоматичного
Формула / Реферат:
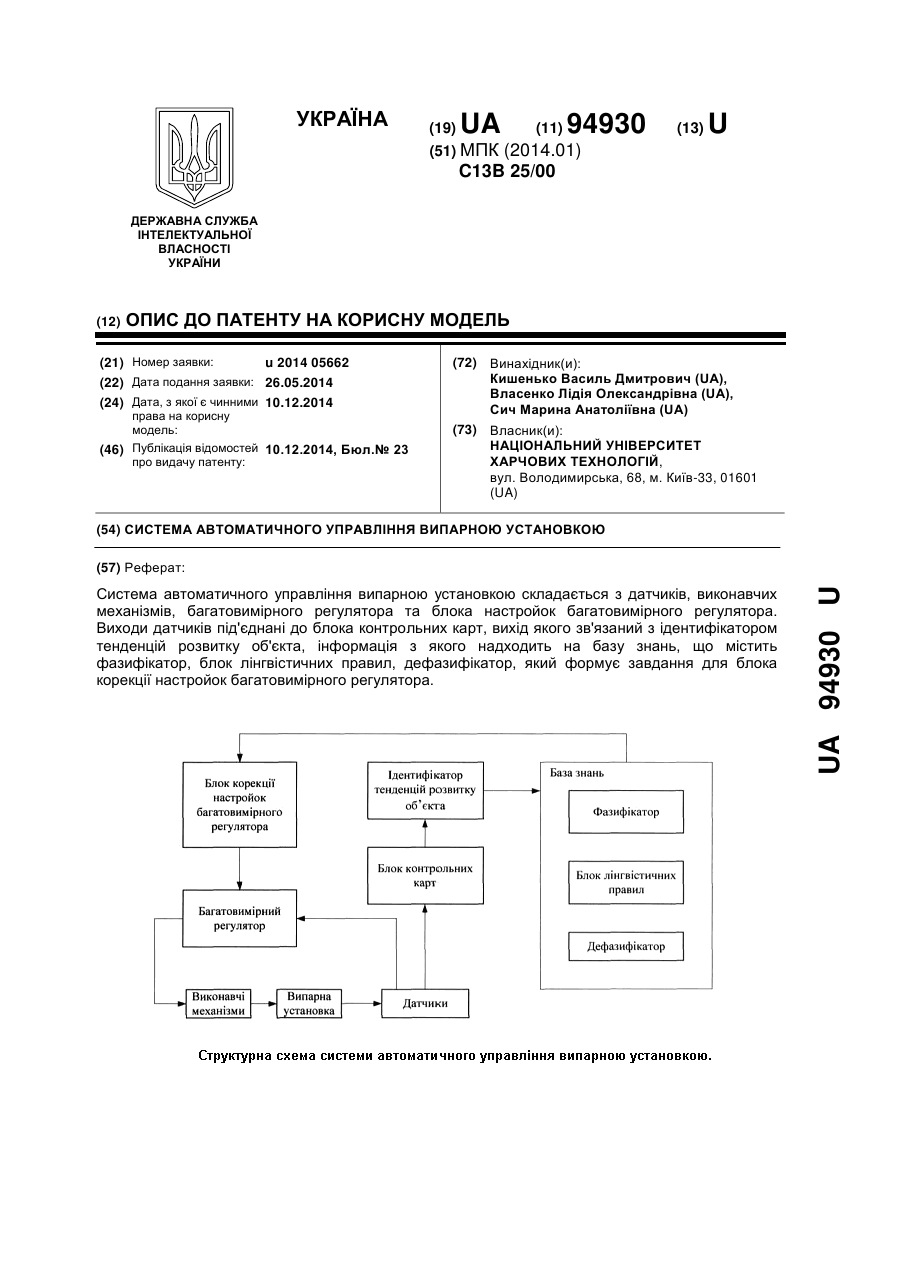
Система автоматичного управління випарною установкою, що складається з датчиків, виконавчих механізмів, багатовимірного регулятора та блока настройок багатовимірного регулятора, яка відрізняється тим, що виходи датчиків під'єднані до блока контрольних карт, вихід якого зв'язаний з ідентифікатором тенденцій розвитку об'єкта, інформація з якого надходить на базу знань, що містить фазифікатор, блок лінгвістичних правил, дефазифікатор, який...
Система автоматичного управління гідравлічним потужним штампувальним пресом
Номер патенту: 13470
Опубліковано: 17.04.2006
Автори: Устінов Володимир Єгорович, Єрьомкін Євген Анатолійович
МПК: B30B 15/26
Мітки: система, автоматичного, пресом, гідравлічним, штампувальним, управління, потужним
Формула / Реферат:
Система автоматичного управління гідравлічним потужним штампувальним пресом, що містить датчики положення рухомої поперечини, датчики тиску у робочому циліндрі, задатчик розміру поковки, індикатор поточного розміру поковки, виконавчий механізм системи, підсилювач потужності, датчики положення виконавчого механізму, виконавчий механізм відключення робочого ходу, електронний обчислювальний пристрій (контролер), що містить ряд блоків: блок...
Система автоматичного управління паркуванням транспортних засобів
Номер патенту: 87089
Опубліковано: 27.01.2014
Автори: Хлівнюк Ванда Олександрівна, Кулік Анатолій Степанович, Харіна Наталія Миколаївна, Дергачов Костянтин Юрійович
МПК: G01S 3/02
Мітки: транспортних, система, паркуванням, управління, засобів, автоматичного
Формула / Реферат:
Система автоматичного управління паркуванням транспортних засобів, що містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаний з глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем...
Попередній патент: Пристрій вакуумування матриці-гайки для формування зовнішньої різьби на кінці склопластикової труби
Наступний патент: Спосіб забезпечення електробезпеки при виконанні робіт на струмоведучих частинах електроустановок надвисоких класів напруги
Випадковий патент: Торцевий електричний двигун постійного струму індукторного типу