Система автоматичного керування рухом судна за курсом
Формула / Реферат
Система автоматичного керування рухом судна за курсом, що містить прилад керування, кермовий привід, у складі якого є виконавчий механізм, кермова машина, пристрій основного внутрішнього зворотного зв'язку, судно як об'єкт керування з пером керма, яка відрізняється тим, що в ній паралельно до виходу пристрою основного внутрішнього зворотного зв'язку установлено пристрій додаткового зворотного зв'язку і виходи пристроїв додаткового й основного внутрішнього зворотного зв'язку подані на вхід суматора, а на вході і виході пристрою додаткового зворотного зв'язку встановлено контакти перемикачів для підключення пристрою додаткового зворотного зв'язку до виходу основного пристрою внутрішнього зворотного зв'язку і до входу суматора.
Текст
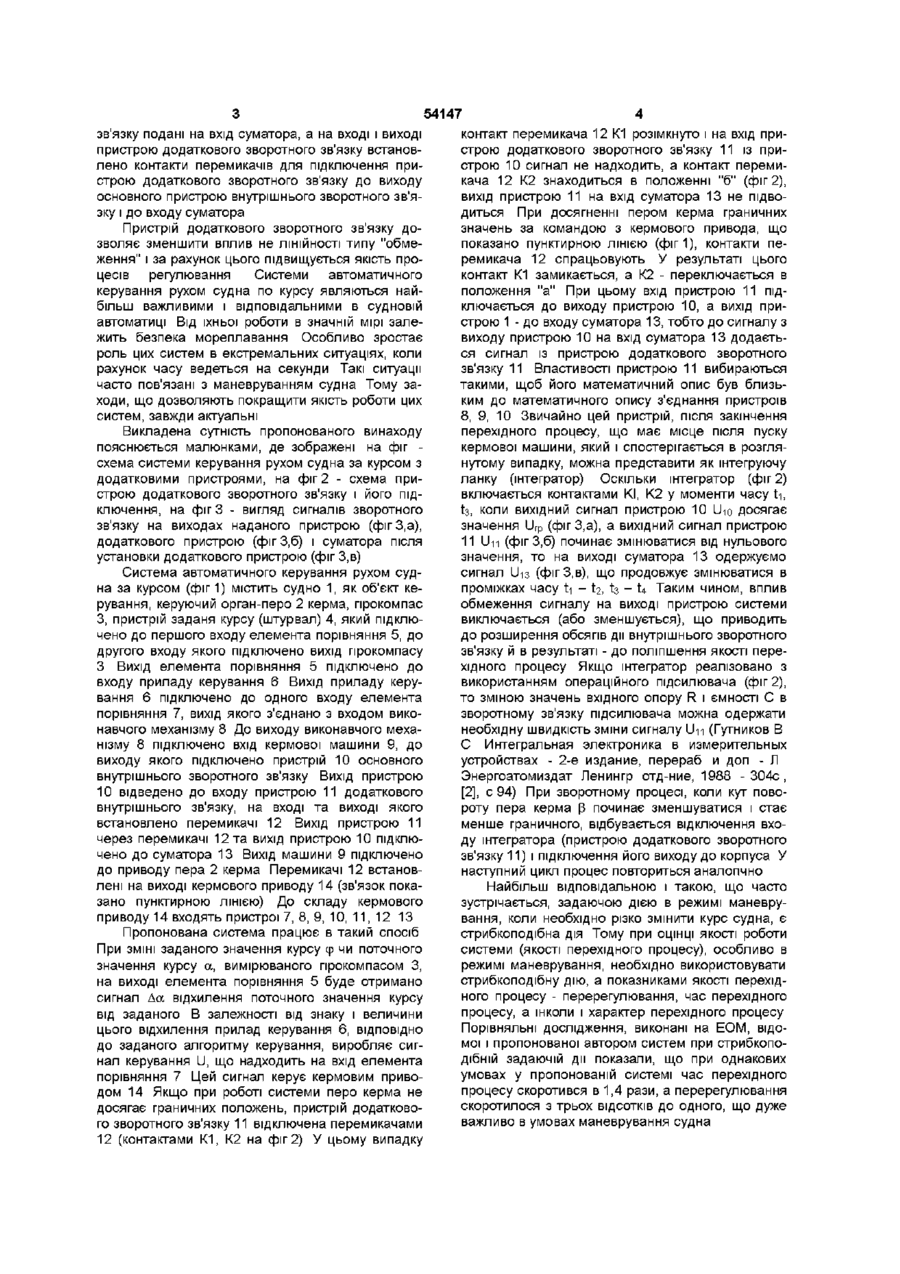
Система автоматичного керування рухом судна за курсом, що містить прилад керування, кермовий привід, у складі якого є виконавчий механізм, кермова машина, пристрій основного внутрішнього зворотного зв'язку, судно як об'єкт Винахід відноситься до галузі нелінійних систем автоматичного керування і може бути застосований на транспорті, у промисловості та в інших галузях, де використовуються системи автоматичного керування, що мають у складі нелінійні елементи типу "обмеження" і, зокрема, у морському транспорті Відомо про ВІТЧИЗНЯНІ системи автоматичного керування рухом суден за курсом, що обладнані авторульовими з електрогідравлічними, електричними і паровими кермовими машинами, і системи з зарубіжних країн Ці системи містять прилад керування, який звичайно називають авторульовим, кермовий привод, судно як об'єкт керування з керуючим органом-пером керма, внутрішній і ЗОВНІШНІЙ зворотні зв'язки Внутрішній зворотний зв'язок у системі здійснюється за допомогою пристрою, механічно зв'язаного з балером керма, і виробляє електричний сигнал, пропорційний куту перекладки пера керма ЗОВНІШНІЙ зворотний зв'язок забезпечується гірокомпасом (або магнітним компасом), сигнал з якого після перетворень подається в авторульовий (Березин С Я , Тетюев Б А Системы автоматического управления движением судов по курсу -Л Судостроение, 1974 -264с, [1]) Відомо Й про ІНШІ системи для керування рухом судна за курсом Такі системи містять регулятор чутливості, інтегруючі пропорційні та дифереНЦІЙНІ ланки, що входять до складу приладу керування, який звичайно називають авторульо керування з пером керма, яка відрізняється тим, що в ній паралельно до виходу пристрою основного внутрішнього зворотного зв'язку установлено пристрій додаткового зворотного зв'язку і виходи пристроїв додаткового й основного внутрішнього зворотного зв'язку подані на вхід суматора, а на вході і виході пристрою додаткового зворотного зв'язку встановлено контакти перемикачів для підключення пристрою додаткового зворотного зв'язку до виходу основного пристрою внутрішнього зворотного зв'язку і до входу суматора вим, виконавчий механізм, кермову машину, кермовий датчик - датчик внутрішнього зворотного зв'язку, що входять до складу кермового привода, і судно, як об'єкт керування з керуючим органомпером керма ([1], мал 1 25) Прилад керування і кермовий привод можуть бути самостійними слідкуючими системами керування У цих відомих системах керування рухом судна за курсом у режимі маневрування при великих кутах перекладки пера керма, коли перо керма досягає граничних значень і стає на упор, у системі з'являється не ЛІНІЙНІСТЬ типу "обмеження" ("насичення") Наявність такої не ЛІНІЙНОСТІ приводить до погіршення якості перехідного процесу регулювання ([1], с 19, 53) Ставиться задача удосконалення системи автоматичного керування рухом судна за курсом, у якій використання додаткових пристроїв дозволяє зменшити вплив не ЛІНІЙНОСТІ і за рахунок цього підвищити якість процесів регулювання Поставлена задача вирішується тим, що в системі автоматичного керування рухом судна за курсом, що містить прилад керування, кермовий привід, у складі якого є виконавчий механізм, кермова машина, пристрій основного внутрішнього зворотного зв'язку, судно як об'єкт керування з пером керма, що в ній, ВІДПОВІДНО ДО винаходу, паралельно до виходу пристрою основного внутрішнього зворотного зв'язку установлено пристрій додаткового зворотного зв'язку і виходи пристроїв додаткового й основного внутрішнього зворотного 5 ю 54147 контакт перемикача 12 К1 розімкнуто і на вхід призвязку подані на вхід суматора, а на вході і виході строю додаткового зворотного зв'язку 11 із припристрою додаткового зворотного зв'язку встановстрою 10 сигнал не надходить, а контакт перемилено контакти перемикачів для підключення прикача 12 К2 знаходиться в положенні "б" (фіг 2), строю додаткового зворотного зв'язку до виходу вихід пристрою 11 на вхід суматора 13 не підвоосновного пристрою внутрішнього зворотного зв'ядиться При досягненні пером керма граничних зку і до входу суматора значень за командою з кермового привода, що Пристрій додаткового зворотного зв'язку допоказано пунктирною ЛІНІЄЮ (фіг1), контакти пезволяє зменшити вплив не ЛІНІЙНОСТІ типу "обмеремикача 12 спрацьовують У результаті цього ження" і за рахунок цього підвищується якість проконтакт К1 замикається, а К2 - переключається в цесів регулювання Системи автоматичного положення "а" При цьому вхід пристрою 11 підкерування рухом судна по курсу являються найключається до виходу пристрою 10, а вихід прибільш важливими і відповідальними в судновій строю 1 - до входу суматора 13, тобто до сигналу з автоматиці Від їхньої роботи в значній мірі залевиходу пристрою 10 на вхід суматора 13 додаєтьжить безпека мореплавання Особливо зростає ся сигнал із пристрою додаткового зворотного роль цих систем в екстремальних ситуаціях, коли зв'язку 11 Властивості пристрою 11 вибираються рахунок часу ведеться на секунди Такі ситуації такими, щоб його математичний опис був близьчасто пов'язані з маневруванням судна Тому заким до математичного опису з'єднання пристроїв ходи, що дозволяють покращити якість роботи цих 8, 9, 10 Звичайно цей пристрій, після закінчення систем, завжди актуальні перехідного процесу, що має місце після пуску Викладена сутність пропонованого винаходу кермової машини, який і спостерігається в розгляпояснюється малюнками, де зображені на фіг нутому випадку, можна представити як інтегруючу схема системи керування рухом судна за курсом з ланку (інтегратор) Оскільки інтегратор (фіг 2) додатковими пристроями, на фіг 2 - схема привключається контактами КІ, К2 у моменти часу t-i, строю додаткового зворотного зв'язку і його підt3, коли вихідний сигнал пристрою 10 U-ю досягає ключення, на фіг 3 - вигляд сигналів зворотного значення и г р (фіг 3,а), а вихідний сигнал пристрою зв'язку на виходах наданого пристрою (фіг 3,а), 11 Un (фіг 3,6) починає змінюватися від нульового додаткового пристрою (фіг 3,6) і суматора після значення, то на виході суматора 13 одержуємо установки додаткового пристрою (фіг 3,в) сигнал U-із (фіг 3,в), що продовжує змінюватися в Система автоматичного керування рухом судпроміжках часу ti - Ь, h - U Таким чином, вплив на за курсом (фіг 1) містить судно 1, як об'єкт кеобмеження сигналу на виході пристрою системи рування, керуючий орган-перо 2 керма, гірокомпас виключається (або зменшується), що приводить З, пристрій заданя курсу (штурвал) 4, який підклюдо розширення обсягів дії внутрішнього зворотного чено до першого входу елемента порівняння 5, до зв'язку й в результаті - до поліпшення якості передругого входу якого підключено вихід гірокомпасу хідного процесу Якщо інтегратор реалізовано з З Вихід елемента порівняння 5 підключено до використанням операційного підсилювача (фіг 2), входу приладу керування 6 Вихід приладу керуто зміною значень вхідного опору R і ємності С в вання 6 підключено до одного входу елемента зворотному зв'язку підсилювача можна одержати порівняння 7, вихід якого з'єднано з входом виконеобхідну швидкість зміни сигналу Un (Путников В навчого механізму 8 До виходу виконавчого мехаС Интегральная электроника в измерительных нізму 8 підключено вхід кермової машини 9, до устройствах - 2-е издание, перераб и доп - Л виходу якого підключено пристрій 10 основного Энергоатомиздат Ленингр отд-ние, 1988 -304с, внутрішнього зворотного зв'язку Вихід пристрою [2], с 94) При зворотному процесі, коли кут пово10 відведено до входу пристрою 11 додаткового роту пера керма р починає зменшуватися і стає внутрішнього зв'язку, на вході та виході якого менше граничного, відбувається відключення вховстановлено перемикачі 12 Вихід пристрою 11 ду інтегратора (пристрою додаткового зворотного через перемикачі 12 та вихід пристрою 10 підклюзв'язку 11) і підключення його виходу до корпуса У чено до суматора 13 Вихід машини 9 підключено наступний цикл процес повториться аналогічно до приводу пера 2 керма Перемикачі 12 встановлені на виході кермового приводу 14 (зв'язок покаНайбільш відповідальною і такою, що часто зано пунктирною ЛІНІЄЮ) ДО складу кермового зустрічається, задаючою дією в режимі маневруприводу 14 входять пристрої 7, 8, 9, 10, 11, 12 13 вання, коли необхідно різко змінити курс судна, є Пропонована система працює в такий спосіб стрибкоподібна дія Тому при ОЦІНЦІ ЯКОСТІ роботи При ЗМІНІ заданого значення курсу е чи поточного р системи (якості перехідного процесу), особливо в значення курсу а, вимірюваного гірокомпасом З, режимі маневрування, необхідно використовувати на виході елемента порівняння 5 буде отримано стрибкоподібну дію, а показниками якості перехідсигнал Да відхилення поточного значення курсу ного процесу - перерегулювання, час перехідного від заданого В залежності від знаку і величини процесу, а інколи і характер перехідного процесу цього відхилення прилад керування 6, ВІДПОВІДНО Порівняльні дослідження, виконані на ЕОМ, відодо заданого алгоритму керування, виробляє сигмої і пропонованої автором систем при стрибкопонал керування U, що надходить на вхід елемента дібній задаючій дії показали, що при однакових порівняння 7 Цей сигнал керує кермовим привоумовах у пропонованій системі час перехідного дом 14 Якщо при роботі системи перо керма не процесу скоротився в 1,4 рази, а перерегулювання досягає граничних положень, пристрій додатковоскоротилося з трьох ВІДСОТКІВ до одного, що дуже го зворотного зв'язку 11 відключена перемикачами важливо в умовах маневрування судна 12 (контактами К1, К2 на фіг 2) У цьому випадку 54147 Ф Да ФІГ.1 От 10 Фіг.З ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of automatic control of course movement of a vessel
Назва патенту російськоюСистема автоматического управления движением судна по курсу
МПК / Мітки
МПК: B63H 25/00, B63B 49/00, B63B 45/00
Мітки: судна, керування, курсом, автоматичного, рухом, система
Код посилання
<a href="https://ua.patents.su/3-54147-sistema-avtomatichnogo-keruvannya-rukhom-sudna-za-kursom.html" target="_blank" rel="follow" title="База патентів України">Система автоматичного керування рухом судна за курсом</a>
Система автоматичного керування насосними агрегатами
Номер патенту: 41430
Опубліковано: 17.09.2001
Автори: СТЕЦКО МИХАЙЛО ГРИГОРОВИЧ, Шовкопляс Іван Петрович
МПК: G05D 9/00
Мітки: система, керування, насосними, агрегатами, автоматичного
Формула / Реферат:
1. Система автоматичного керування насосними агрегатами, яка складається з випрямлячів змінної напруги сигналів, підсилювачів постійного струму, входами з'єднаних з виходами випрямлячів змінної напруги сигналів, пристрою керування, входами з'єднаного з виходами випрямлячів змінної напруги сигналів, виходом схеми захисту електродвигуна від аварійних режимів роботи, вхід якої з'єднано з виходами трансформаторів струму, виходом схеми захисту...
Система автоматичного керування процесом горіння
Номер патенту: 53941
Опубліковано: 17.02.2003
Автори: Кашин Володимир Іванович, Бегунов Микола Павлович, Кашина Тетяна Олександрівна, Грунський Віталій Павлович
МПК: F23N 1/02
Мітки: автоматичного, система, процесом, керування, горіння
Формула / Реферат:
Система автоматичного керування процесом горіння, що містить з'єднані в технологічній послідовності пальник, електроди підпалювання та наявності полум'я, трансформатор, автомат керування роботою пальника, клапан-відсікач газу, регулятор співвідношення газ/повітря, дросельну заслінку з електроприводом та перетворювач термоелектричний, яка відрізняється тим, що в електричний ланцюг регулювання потужності пальника введено мікропроцесорний...
Система автоматичного керування регулюючим органом гідромашини
Номер патенту: 15516
Опубліковано: 30.06.1997
Автори: Пожидаєв Віталій Іванович, Ушомирський Боріс Аронович, Шилов Валерій Павлович
МПК: F03B 15/00, F15B 1/00
Мітки: автоматичного, гідромашини, керування, система, регулюючим, органом
Формула / Реферат:
(57) Система автоматического управления регулирующим органом гидромашины, содержащая аккумулятор давления, гидравлический поршневой сервомотор с полостями давления и слива, соединенный с ним командоаппарат, главный золотник, подключенный к аккумулятору давления, и золотник, установленный между главным золотником и сервомотором, и соединяющий в одной из позиций полости последнего между собой и с аккумулятором давления по сигналу...
Спосіб автоматичного управління рухом транспортного засобу
Номер патенту: 13290
Опубліковано: 28.02.1997
Автори: Кизима Станіслав Степанович, Павлюк Дмитро Олександрович
МПК: B60T 8/72, G08G 1/052
Мітки: рухом, транспортного, управління, автоматичного, спосіб, засобу
Формула / Реферат:
(57) Способ автоматического управления движением транспортного средства, основанный на определении текущего значения ускорения транспортного средства и формировании управляющего воздействия на органы, связанные с движущим или тормозным приводом, отличающийся тем, что формируют соответствующий текущему значению ускорения транспортного средства сигнал динамической перегрузки, по значению которого осуществляют формирование управляющего...
Система автоматичного керування виконавчим органом прохідницького комбайну виборчої дії
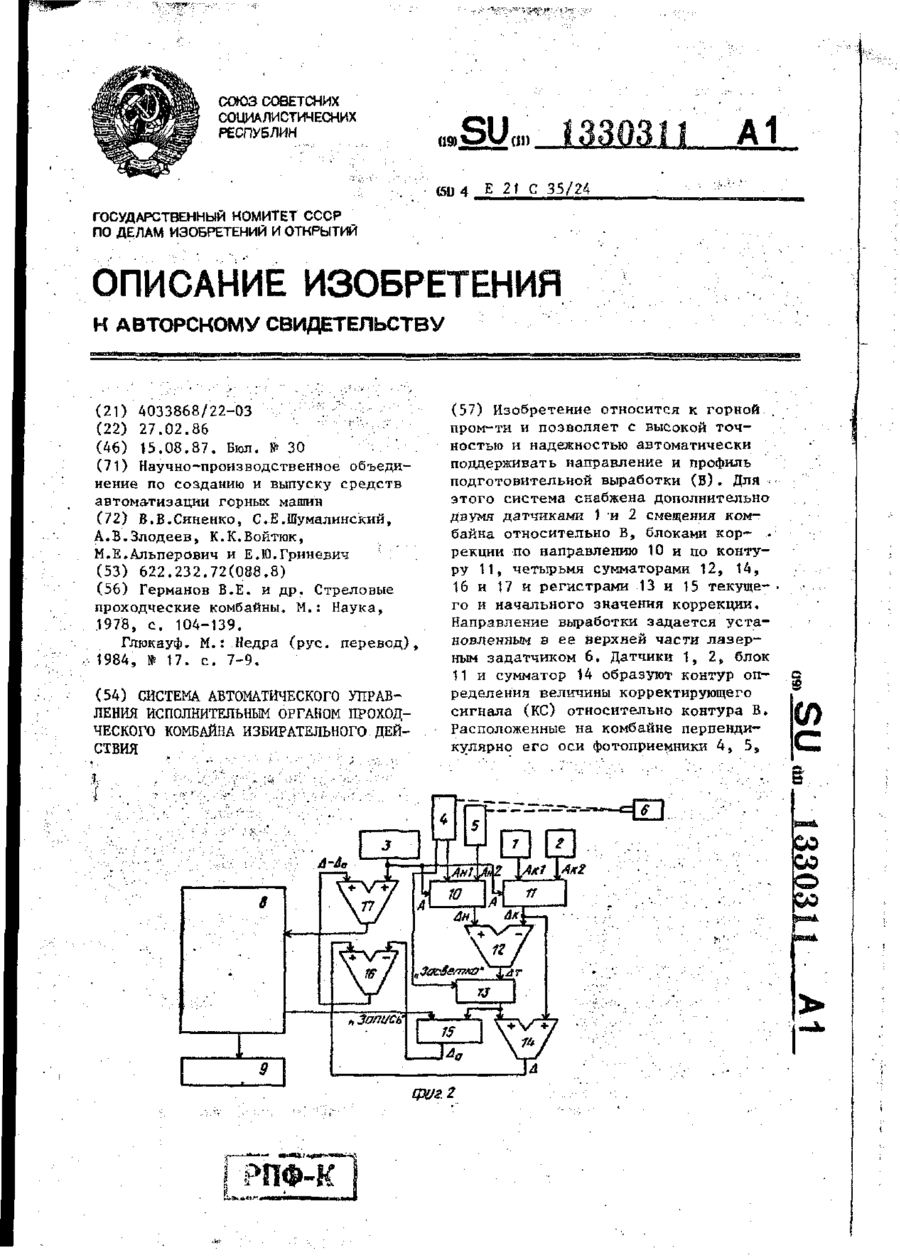
Номер патенту: 7626
Опубліковано: 26.12.1995
Автори: Сіненко Віктор Васильович, Войтюк Клим Кириллович, Грінєвіч Євген Юрьєвич, Альперовіч Михайло Євгенович, Шумалінський Семен Овсійович, Злодєєв Олександр Васильович
МПК: E21C 35/24
Мітки: система, керування, дії, автоматичного, виконавчим, прохідницького, комбайну, виборчої, органом
Формула / Реферат:
Система автоматического управления исполнительным органом проходческого комбайна избирательного действия, содержащая блок программного управления, блок исполнительных механизмов, датчик горизонтального положения исполнительного органа и задатчик направления лазерный, оптически связанный с двумя фотоприемниками, расположенными на комбайне один за другим перпендикулярно его продольной оси, отличающаяся тем, что, с целью повышения скорости...
Попередній патент: Спосіб захисту коштів довгострокових фінансових вкладень від впливу інфляції
Наступний патент: Спосіб отримання алкалоїдів із рослинної сировини chelidonium majus l.
Випадковий патент: Біспецифічна зв'язувальна молекула, яка зв'язується з vegf i ang2