Система визначення маршруту руху транспортного об’єкта
Номер патенту: 96849
Опубліковано: 25.02.2015
Автори: Думбадзе Олена Тамазієвна, Дергачев Константин Юрійович, Кулік Анатолій Степанович

Формула / Реферат
Система визначення маршруту руху транспортного об'єкта, яка містить приймач, глобальну супутникову систему, керуючий контролер, джерело живлення, систему стабілізації живлення, пристрій індикації, акумулятор, оперативну пам'ять, датчик палива, бездротовий передавач інформації, енергонезалежний зберігач інформації, рухомий об'єкт, причому вихід глобальної супутникової системи з'єднано із першим входом контрольної станції, вихід джерела живлення з'єднано із першим входом системи стабілізації живлення, другий вихід системи стабілізації живлення з'єднано із входом акумулятора, вихід акумулятора з'єднано із третім входом системи стабілізації живлення, вихід рухомого об'єкта з'єднано із першим входом приймача, вихід контрольної станції з'єднано із другим входом приймача, перший вихід системи стабілізації живлення з'єднано із третім входом приймача, вихід датчика палива з'єднано із першим входом керуючого контролера, вихід приймача з'єднано із другим входом керуючого контролера, організовано двосторонній зв'язок із оперативною пам'яттю, через перший вихід керуючого контролера організовано двосторонній зв'язок із енергонезалежним зберігачем інформації, другий вихід енергонезалежного зберігача інформації з'єднано із першим входом бездротового передавача інформації, другий вихід керуючого контролера з'єднано із другим входом бездротового передавача інформації, вихід бездротового передавача інформації з'єднано із першим входом пристрою індикації, другий вихід системи стабілізації живлення з'єднано із другим входом пристрою індикації яка відрізняється тим, що введені блок обчислення відстані, який з'єднано із другим входом контрольної станції, центр побудови маршруту, з яким організований двосторонній зв'язок із пристроєм індикації, передатчик, вхід якого з'єднано із виходом центра побудови маршруту, а вихід якого з'єднано із рухомим об'єктом.
Текст
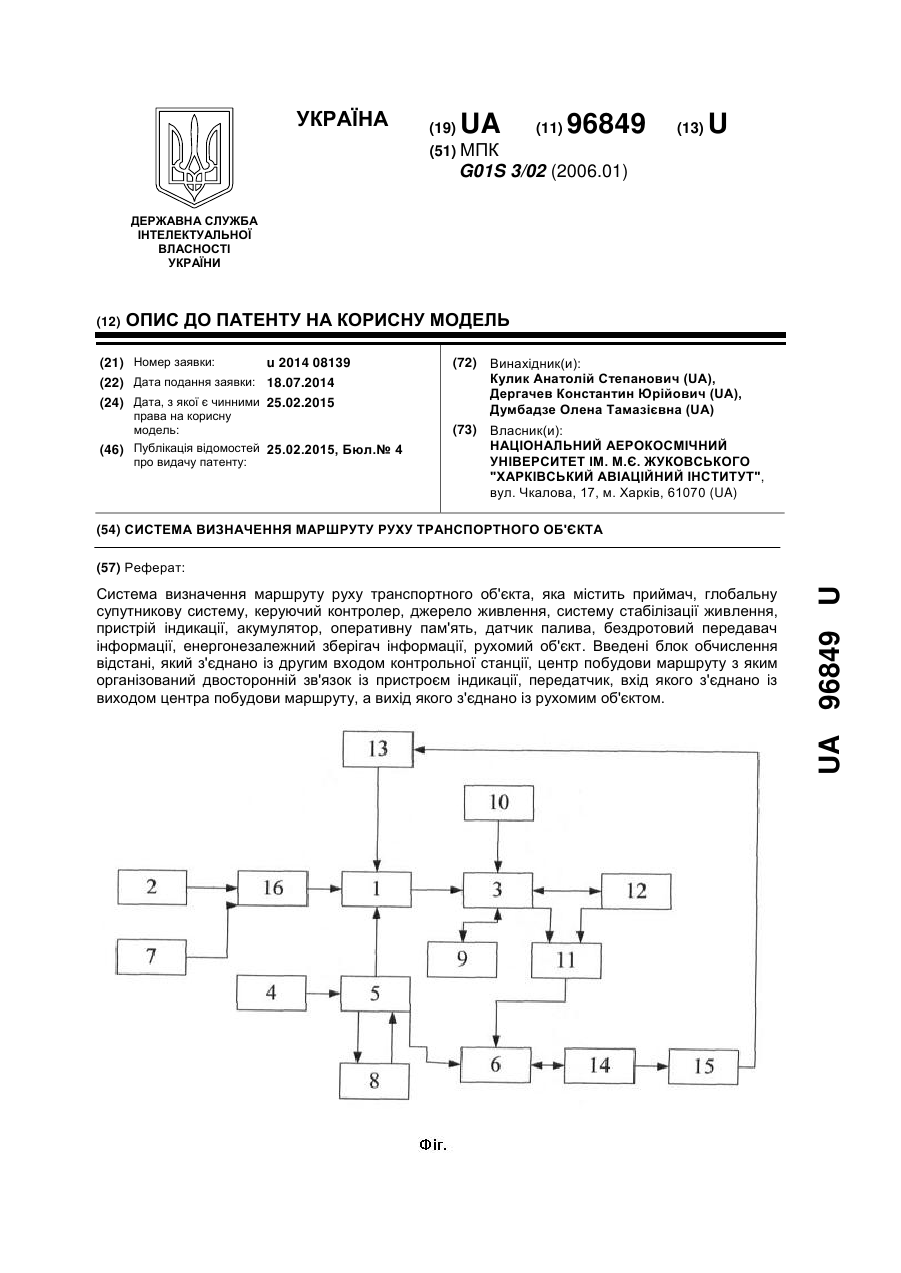
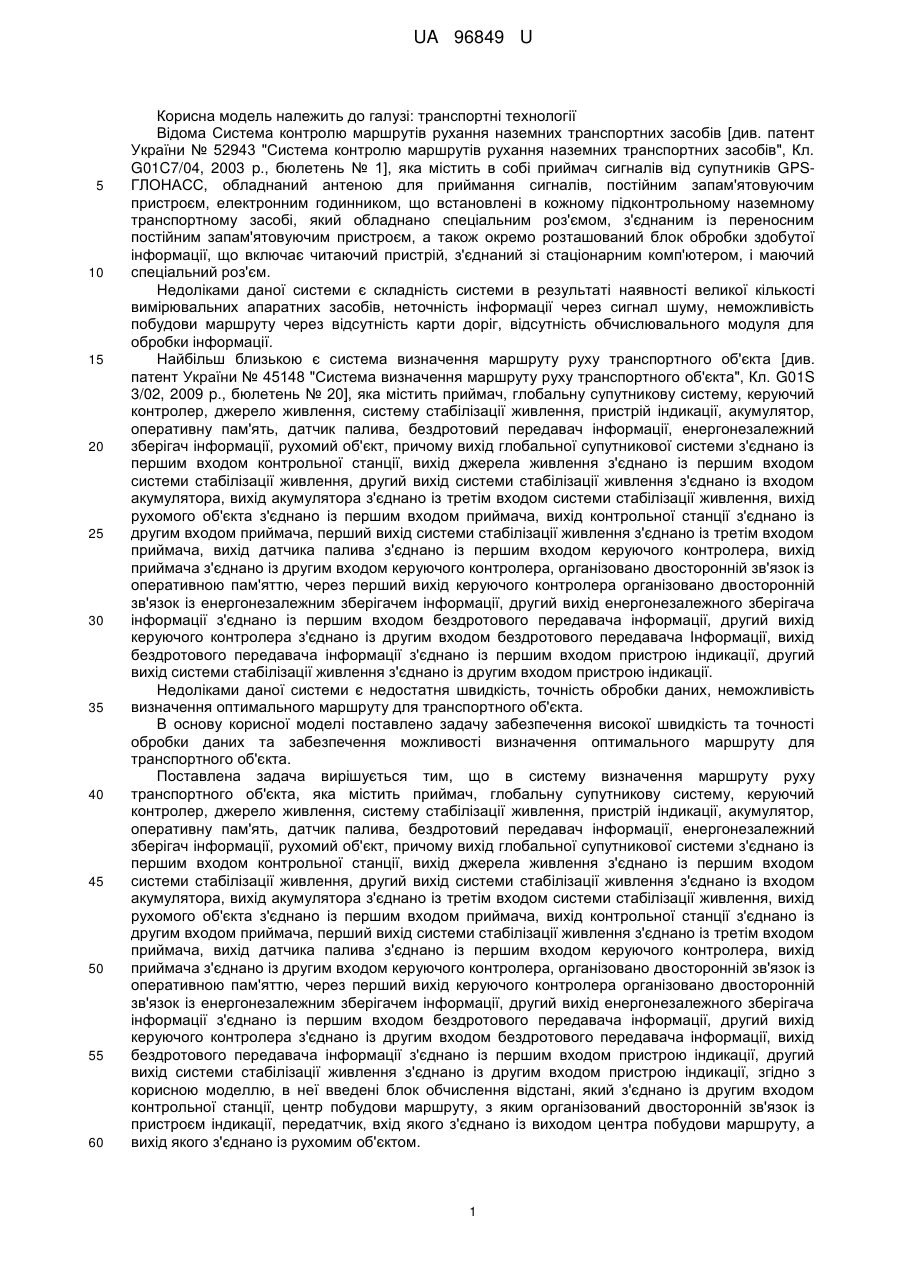
Реферат: UA 96849 U UA 96849 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі: транспортні технології Відома Система контролю маршрутів рухання наземних транспортних засобів [див. патент України № 52943 "Система контролю маршрутів рухання наземних транспортних засобів", Кл. G01C7/04, 2003 p., бюлетень № 1], яка містить в собі приймач сигналів від супутників GPSГЛОНАСС, обладнаний антеною для приймання сигналів, постійним запам'ятовуючим пристроєм, електронним годинником, що встановлені в кожному підконтрольному наземному транспортному засобі, який обладнано спеціальним роз'ємом, з'єднаним із переносним постійним запам'ятовуючим пристроєм, а також окремо розташований блок обробки здобутої інформації, що включає читаючий пристрій, з'єднаний зі стаціонарним комп'ютером, і маючий спеціальний роз'єм. Недоліками даної системи є складність системи в результаті наявності великої кількості вимірювальних апаратних засобів, неточність інформації через сигнал шуму, неможливість побудови маршруту через відсутність карти доріг, відсутність обчислювального модуля для обробки інформації. Найбільш близькою є система визначення маршруту руху транспортного об'єкта [див. патент України № 45148 "Система визначення маршруту руху транспортного об'єкта", Кл. G01S 3/02, 2009 p., бюлетень № 20], яка містить приймач, глобальну супутникову систему, керуючий контролер, джерело живлення, систему стабілізації живлення, пристрій індикації, акумулятор, оперативну пам'ять, датчик палива, бездротовий передавач інформації, енергонезалежний зберігач інформації, рухомий об'єкт, причому вихід глобальної супутникової системи з'єднано із першим входом контрольної станції, вихід джерела живлення з'єднано із першим входом системи стабілізації живлення, другий вихід системи стабілізації живлення з'єднано із входом акумулятора, вихід акумулятора з'єднано із третім входом системи стабілізації живлення, вихід рухомого об'єкта з'єднано із першим входом приймача, вихід контрольної станції з'єднано із другим входом приймача, перший вихід системи стабілізації живлення з'єднано із третім входом приймача, вихід датчика палива з'єднано із першим входом керуючого контролера, вихід приймача з'єднано із другим входом керуючого контролера, організовано двосторонній зв'язок із оперативною пам'яттю, через перший вихід керуючого контролера організовано двoсторонній зв'язок із енергонезалежним зберігачем інформації, другий вихід енергонезалежного зберігача інформації з'єднано із першим входом бездротового передавача інформації, другий вихід керуючого контролера з'єднано із другим входом бездротового передавача Інформації, вихід бездротового передавача інформації з'єднано із першим входом пристрою індикації, другий вихід системи стабілізації живлення з'єднано із другим входом пристрою індикації. Недоліками даної системи є недостатня швидкість, точність обробки даних, неможливість визначення оптимального маршруту для транспортного об'єкта. В основу корисної моделі поставлено задачу забезпечення високої швидкість та точності обробки даних та забезпечення можливості визначення оптимального маршруту для транспортного об'єкта. Поставлена задача вирішується тим, що в систему визначення маршруту руху транспортного об'єкта, яка містить приймач, глобальну супутникову систему, керуючий контролер, джерело живлення, систему стабілізації живлення, пристрій індикації, акумулятор, оперативну пам'ять, датчик палива, бездротовий передавач інформації, енергонезалежний зберігач інформації, рухомий об'єкт, причому вихід глобальної супутникової системи з'єднано із першим входом контрольної станції, вихід джерела живлення з'єднано із першим входом системи стабілізації живлення, другий вихід системи стабілізації живлення з'єднано із входом акумулятора, вихід акумулятора з'єднано із третім входом системи стабілізації живлення, вихід рухомого об'єкта з'єднано із першим входом приймача, вихід контрольної станції з'єднано із другим входом приймача, перший вихід системи стабілізації живлення з'єднано із третім входом приймача, вихід датчика палива з'єднано із першим входом керуючого контролера, вихід приймача з'єднано із другим входом керуючого контролера, організовано двoсторонній зв'язок із оперативною пам'яттю, через перший вихід керуючого контролера організовано двoсторонній зв'язок із енергонезалежним зберігачем інформації, другий вихід енергонезалежного зберігача інформації з'єднано із першим входом бездротового передавача інформації, другий вихід керуючого контролера з'єднано із другим входом бездротового передавача інформації, вихід бездротового передавача інформації з'єднано із першим входом пристрою індикації, другий вихід системи стабілізації живлення з'єднано із другим входом пристрою індикації, згідно з корисною моделлю, в неї введені блок обчислення відстані, який з'єднано із другим входом контрольної станції, центр побудови маршруту, з яким організований двoсторонній зв'язок із пристроєм індикації, передатчик, вхід якого з'єднано із виходом центра побудови маршруту, а вихід якого з'єднано із рухомим об'єктом. 1 UA 96849 U 5 10 15 20 25 30 35 40 45 Суть корисної моделі пояснюється кресленням, де показана блок-схема Системи визначення маршруту руху транспортного об'єкта. Система визначення маршруту руху транспортного об'єкта, містить приймач 1, глобальну супутникову систему 2, керуючий контролер 3, джерело живлення 4, систему стабілізації живлення 5, пристрій індикації 6, акумулятор 8, оперативну пам'ять 9, датчик палива 10, бездротовий передавач інформації 11, енергонезалежний зберігач інформації 12, рухомий об'єкт 13, причому вихід глобальної супутникової системи 2 з'єднано із першим входом контрольної станції 16, вихід джерела живлення з'єднано із першим входом системи стабілізації живлення 5, другий вихід системи стабілізації живлення 5 з'єднано із входом акумулятора 8, вихід акумулятора 8 з'єднано із третім входом системи стабілізації живлення 5, вихід рухомого об'єкта 13 з'єднано із першим входом приймача 1, вихід контрольної станції 16 з'єднано із другим входом приймача 1, перший вихід системи стабілізації живлення 5 з'єднано із третім входом приймача 1, вихід датчика палива 10 з'єднано із першим входом керуючого контролера 3, вихід приймача 1 з'єднано із другим входом керуючого контролера 3, організовано двoсторонній зв'язок із оперативною пам'яттю 9, через перший вихід керуючого контролера 3 організовано двoсторонній зв'язок із енергонезалежним зберігачем інформації 12, другий вихід енергонезалежного зберігача інформації 12 з'єднано із першим входом бездротового передавача інформації 11, другий вихід керуючого контролера 3 з'єднано із другим входом бездротового передавача інформації 11, вихід бездротового передавача інформації 11 з'єднано із першим входом пристрою індикації 6, другий вихід системи стабілізації живлення 5 з'єднано із другим входом пристрою індикації 6, введені блок обчислення відстані 7, який з'єднано із другим входом контрольної станції 16, центр побудови маршруту 14, з яким організований двoсторонній зв'язок із пристроєм індикації 6, передатчик 15, вхід якого з'єднано із виходом центра побудови маршруту 14, а вихід якого з'єднано із рухомим об'єктом 13. Запропонована система працює наступним чином. Керуючий контролер 3 приймає інформацію про рухомий об'єкт 13 від приймача 1, який в свою чергу, приймає інформацію за допомогою глобальної супутникової системи 2, сигнал якої разом із даними блока обчислення відстані 7, який обраховує відстань за допомогою сигналу від наземної станції, надходить до контрольної станції 16, де відбувається диференціювання сигналу супутникової системи. Керуючий контролер 3 приймає та фіксує інформацію від датчика палива 10, потім керуючий контролер 3 перетворює прийняту цифрову інформацію про координати рухомого об'єкта 13 у формат, необхідний для подальшого передавання через пристрій індикації 6 за допомогою бездротового передавача інформації 11 в центр побудови маршруту 14. Живлення системи здійснюється через джерело живлення 4 або через додаткові вбудовані акумулятори 8. Керуючий контролер 3 фіксує визначення поточних координат рухомого об'єкта 13, а також якість прийнятих сигналів від контрольної станції 16. Інформація про час, координати та якість функціонування приймача 1 передається керуючим контролером 3 на енергонезалежний зберігач інформації 12, а потім за допомогою бездротового передавача інформації 11 через пристрій індикації 6 зв'язку з персональним комп'ютером передається на центр побудови маршруту 14, де дані про місцезнаходження рухомого об'єкта відображаються на екрані монітора за допомогою засобів картографічної підтримки. Після з моделювання можливих маршрутів руху рухомого об'єкта 13 через передатчик 15 передається на рухомий об'єкт 13, який вносить зміни в існуючий маршрут. Таким чином, запропонована система дозволяє отримати високу швидкість та точність обробки даних, визначення оптимального маршруту для транспортного об'єкта. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 60 Система визначення маршруту руху транспортного об'єкта, яка містить приймач, глобальну супутникову систему, керуючий контролер, джерело живлення, систему стабілізації живлення, пристрій індикації, акумулятор, оперативну пам'ять, датчик палива, бездротовий передавач інформації, енергонезалежний зберігач інформації, рухомий об'єкт, причому вихід глобальної супутникової системи з'єднано із першим входом контрольної станції, вихід джерела живлення з'єднано із першим входом системи стабілізації живлення, другий вихід системи стабілізації живлення з'єднано із входом акумулятора, вихід акумулятора з'єднано із третім входом системи стабілізації живлення, вихід рухомого об'єкта з'єднано із першим входом приймача, вихід контрольної станції з'єднано із другим входом приймача, перший вихід системи стабілізації живлення з'єднано із третім входом приймача, вихід датчика палива з'єднано із першим входом керуючого контролера, вихід приймача з'єднано із другим входом керуючого контролера, організовано двосторонній зв'язок із оперативною пам'яттю, через перший вихід керуючого 2 UA 96849 U 5 контролера організовано двосторонній зв'язок із енергонезалежним зберігачем інформації, другий вихід енергонезалежного зберігача інформації з'єднано із першим входом бездротового передавача інформації, другий вихід керуючого контролера з'єднано із другим входом бездротового передавача інформації, вихід бездротового передавача інформації з'єднано із першим входом пристрою індикації, другий вихід системи стабілізації живлення з'єднано із другим входом пристрою індикації, яка відрізняється тим, що введені блок обчислення відстані, який з'єднано із другим входом контрольної станції, центр побудови маршруту, з яким організований двосторонній зв'язок із пристроєм індикації, передатчик, вхід якого з'єднано із виходом центра побудови маршруту, а вихід якого з'єднано із рухомим об'єктом. Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюKulyk Anatoliy Stepanovych
Автори російськоюКулик Анатолий Степанович
МПК / Мітки
МПК: G01S 3/02
Мітки: маршруту, об'єкта, транспортного, система, визначення, руху
Код посилання
<a href="https://ua.patents.su/5-96849-sistema-viznachennya-marshrutu-rukhu-transportnogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Система визначення маршруту руху транспортного об’єкта</a>
Система визначення маршруту руху транспортного об’єкта
Номер патенту: 45148
Опубліковано: 26.10.2009
Автори: Дорош Ігор Сергійович, Дергачев Костянтин Юрійович, Бандура Іван Миколайович
МПК: G01S 3/02
Мітки: маршруту, об'єкта, руху, визначення, транспортного, система
Формула / Реферат:
Система визначення маршруту руху транспортного об'єкта, яка містить приймач, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вихід якого послідовно через підсистему стабілізації живлення та пристрій індикації з персональним комп'ютером з'єднаний з центральною станцією, вбудовані акумулятори, входи і виходи яких з'єднані з підсистемою стабілізації живлення, керуючий контролер, входи і виходи якого...
Автоматизована система побудови оптимального маршруту руху транспортного агрегату
Номер патенту: 53723
Опубліковано: 11.10.2010
Автори: Дергачов Костянтин Юрійович, Морозов Володимир Володимирович, Грібков Антон Євгенович, Кулік Анатолій Степанович
МПК: G01S 3/02
Мітки: оптимального, руху, агрегату, система, транспортного, автоматизована, побудови, маршруту
Формула / Реферат:
Автоматизована система побудови оптимального маршруту руху транспортного агрегату, що містить приймач, приєднаний до рухомого об'єкта, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним...
Спосіб визначення маршруту руху наземного транспортного засобу у вибраний проміжок часу
Номер патенту: 57202
Опубліковано: 16.06.2003
Автор: Олексієнко Олег Володимирович
МПК: G01C 21/34, G01C 7/00
Мітки: маршруту, визначення, транспортного, вибраний, наземного, засобу, спосіб, часу, проміжок, руху
Формула / Реферат:
Спосіб визначення маршруту рухання наземного транспортного засобу у вибраний проміжок часу що включає читання дискретної інформації від супутників GPS та ГЛОНАСС про місцезнаходження наземного транспортного засобу, запис та зберігання отриманої інформації, обробку записаної інформації з допомогою спеціального програмного забезпечення комп'ютерів і вивід здобутих результатів в системах відображення інформації, який відрізняється тим, що для...
Система визначення місцеположення рухомих об’єктів
Номер патенту: 76146
Опубліковано: 25.12.2012
Автори: Дергачов Костянтин Юрійович, Кошелева Марія Миколаївна, Кулік Анатолій Степанович
МПК: G01S 3/02
Мітки: об'єктів, місцеположення, рухомих, визначення, система
Формула / Реферат:
Система визначення місцеположення рухомих об'єктів, яка містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з...
Система корегування режимів роботи світлофорів відповідно до маршруту руху спецтранспорту та маршрутного транспорту
Номер патенту: 91919
Опубліковано: 25.07.2014
Автори: Свирса Денис Віталійович, Свирса Карина Віталіївна, Желтухін Олександр Василійович
МПК: G08G 1/095, G08G 1/0968
Мітки: відповідно, режимів, маршруту, система, світлофорів, транспорту, роботи, спецтранспорту, маршрутного, корегування, руху
Формула / Реферат:
Система корегування режимів роботи світлофорів відповідно до маршруту руху спецтранспорту та маршрутного транспорту, в якій система керування світлофорами з'єднана з пристроями визначення та передачі поточних координат, встановлених на самих автомобілях, яка відрізняється тим, що використано систему керування роботою світлофорів сумісно з системою, побудованою на основі ZigBee-мережі, яка являє собою мережу пристроїв, обладнаних...
Попередній патент: Формувач одиночної симетричної триімпульсної кодової серії з програмованими часовими параметрами
Наступний патент: Портативний цифровий кутомір-ротатометр для визначення функції передпліччя
Випадковий патент: Двоступінчатий безперервнодіючий підземний генератор біоводню