Система управління кутом тангажа літального апарата
Номер патенту: 98659
Опубліковано: 12.05.2015
Автори: Симонов Володимир Федорович, Карпова Тетяна Володимирівна
Формула / Реферат
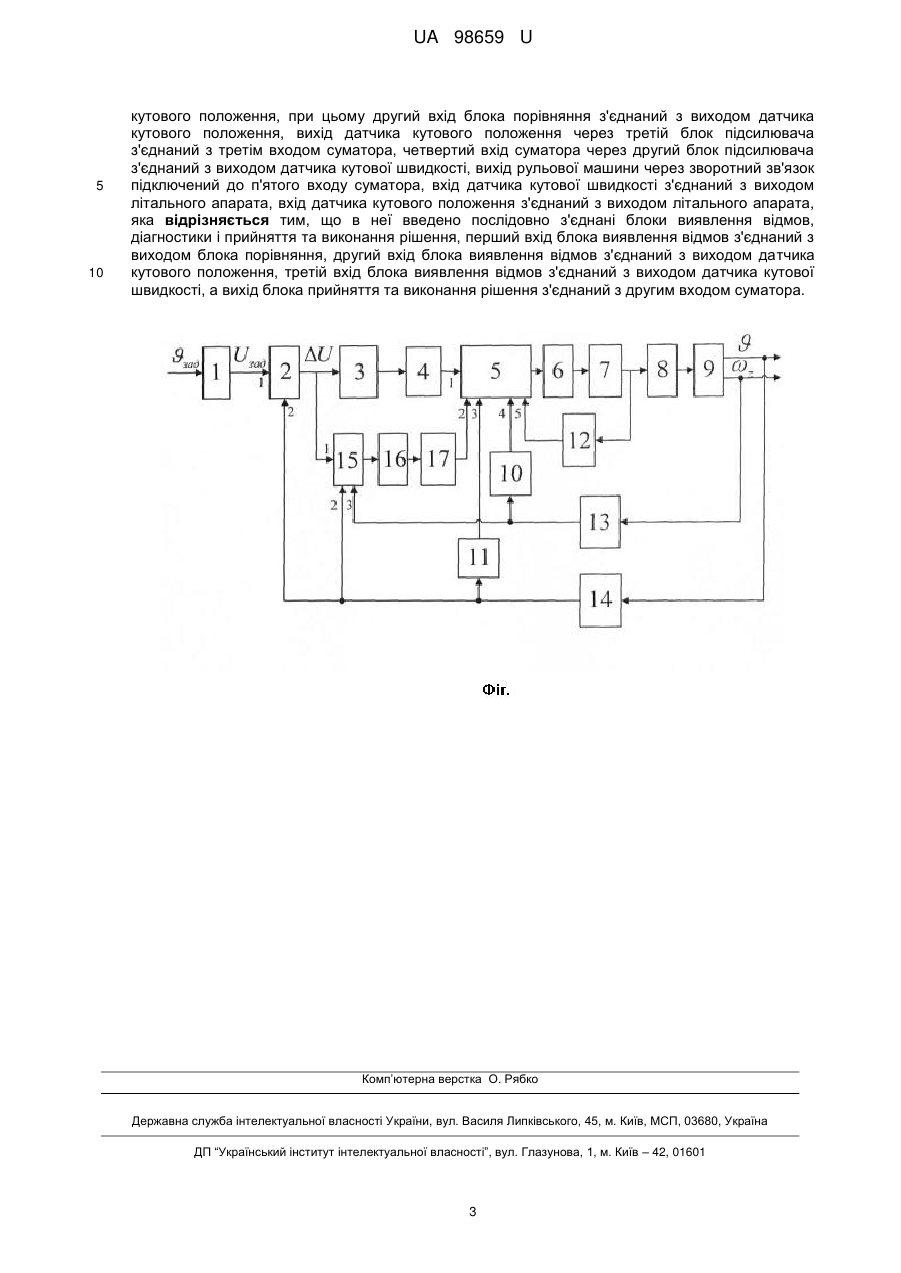
Система управління кутом тангажа літального апарата, що містить послідовно з'єднані блок задатчика сигналу тангажа, блок порівняння, інтегратор, перший блок підсилювача, суматор, підсилювач рульової машини, рульову машину, руль висоти, літальний апарат, а також містить другий та третій блоки підсилювачів, зворотний зв'язок, датчик кутової швидкості, датчик кутового положення, при цьому другий вхід блока порівняння з'єднаний з виходом датчика кутового положення, вихід датчика кутового положення через третій блок підсилювача з'єднаний з третім входом суматора, четвертий вхід суматора через другий блок підсилювача з'єднаний з виходом датчика кутової швидкості, вихід рульової машини через зворотний зв'язок підключений до п'ятого входу суматора, вхід датчика кутової швидкості з'єднаний з виходом літального апарата, вхід датчика кутового положення з'єднаний з виходом літального апарата, яка відрізняється тим, що в неї введено послідовно з'єднані блоки виявлення відмов, діагностики і прийняття та виконання рішення, перший вхід блока виявлення відмов з'єднаний з виходом блока порівняння, другий вхід блока виявлення відмов з'єднаний з виходом датчика кутового положення, третій вхід блока виявлення відмов з'єднаний з виходом датчика кутової швидкості, а вихід блока прийняття та виконання рішення з'єднаний з другим входом суматора.
Текст
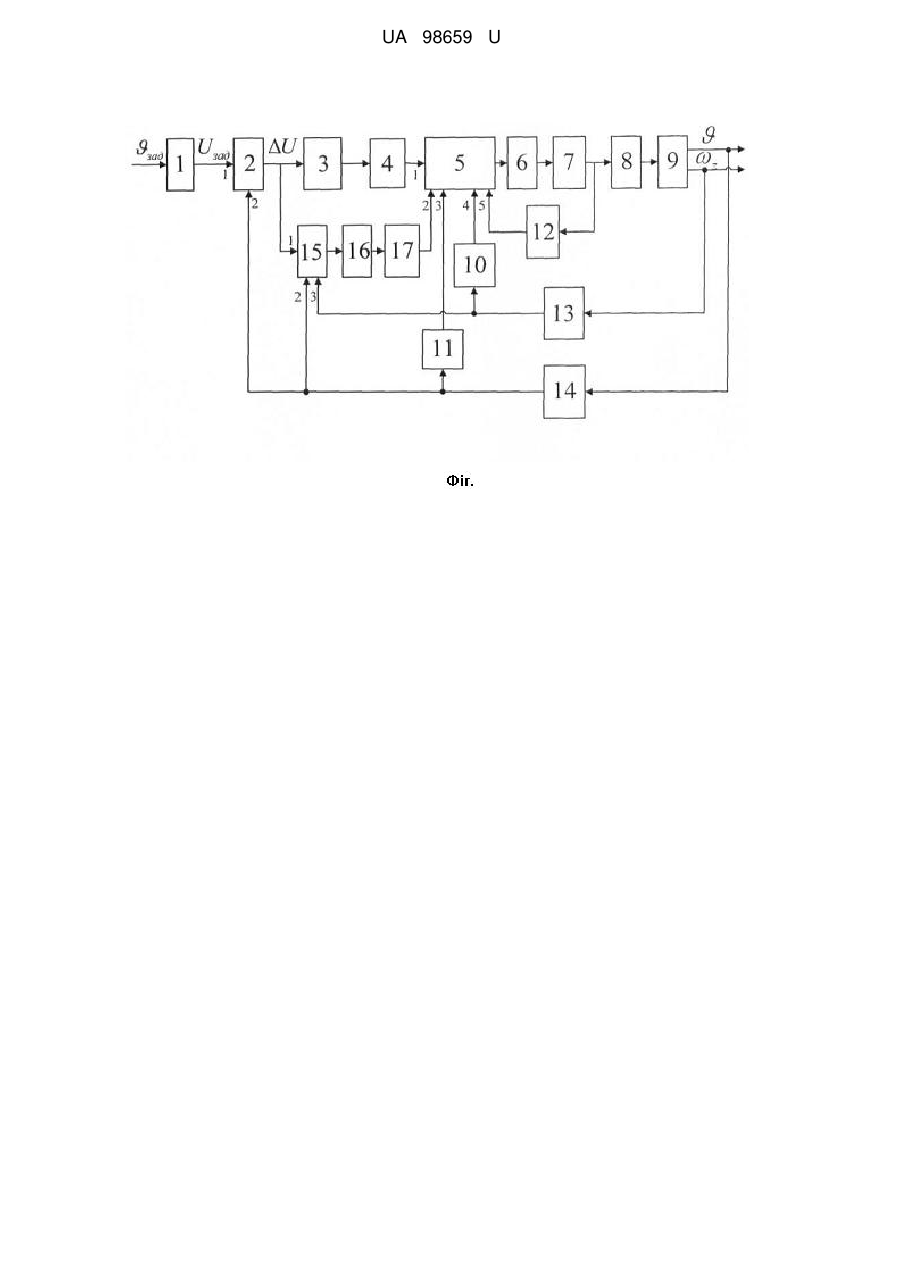
Реферат: UA 98659 U UA 98659 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до бортових систем автоматичного управління літальними апаратами (ЛА). Відома система управління кутом тангажа літального апарата, що містить послідовно з'єднані блок задатчика сигналу тангажа, блок порівняння, інтегратор, перший блок підсилювача, суматор, підсилювач рульової машини, рульову машину, руль висоти, літальний апарат, а також містить другий та третій блоки підсилювачів, зворотний зв'язок, датчик кутової швидкості, датчик кутового положення, при цьому другий вхід блока порівняння з'єднаний з виходом датчика кутового положення, четвертий вхід суматора через другий блок підсилювача з'єднаний з виходом датчика кутової швидкості, вихід рульової машини через зворотний зв'язок підключений до п'ятого входу суматора, вхід датчика кутової швидкості з'єднаний з виходом літального апарата, вхід датчика кутового положення з'єднаний з виходом літального апарата (И.А. Михалев и др. "Системы автоматического управления самолетом". - М.: Машиностроение, 1987 г. с.174). Недоліком даної системи управління є велике перерегулювання в перехідних процесах та низька надійність у випадку відмови датчика кутового положення або датчика кутової швидкості. Найбільш близьким до даного винаходу, прийнятим за прототип, є система управління кутом тангажа літального апарата, яка містить послідовно з'єднані блок задатчика сигналу тангажа, блок порівняння, інтегратор, перший блок підсилювача, суматор, підсилювач рульової машини, рульову машину, руль висоти, літальний апарат, а також містить другий та третій блоки підсилювачів, зворотний зв'язок, датчик кутової швидкості, датчик кутового положення, при цьому другий вхід блока порівняння з'єднаний з виходом датчика кутового положення, вихід датчика кутового положення через третій блок підсилювача з'єднаний з третім входом суматора, четвертий вхід суматора через другий блок підсилювача з'єднаний з виходом датчика кутової швидкості, вихід рульової машини через зворотний зв'язок підключений до п'ятого входу суматора, вхід датчика кутової швидкості з'єднаний з виходом літального апарата, вхід датчика кутового положення з'єднаний з виходом літального апарата (патент RU 2461041 С1, опубл. 10.09.2012). Недоліком такої системи є низька надійність у випадку відмови датчика кутового положення або датчика кутової швидкості канапа тангажа. Види відмов: зсув характеристики відносно вісі абсцис або ординат, зменшення коефіцієнту, обрив проводів одного з датчиків. Задачею корисної моделі є підвищення відмовостійкості системи управління кутом тангажа літального апарата. Поставлена задача вирішується тим, що в систему управління кутом тангажа літального апарата, що містить послідовно з'єднані блок задатчика сигналу тангажа, блок порівняння, інтегратор, перший блок підсилювача, суматор, підсилювач рульової машини, рульову машину, руль висоти, літальний апарат, а також містить другий та третій блоки підсилювачів, зворотний зв'язок, датчик кутової швидкості, датчик кутового положення, при цьому другий вхід блока порівняння з'єднаний з виходом датчика кутового положення, вихід датчика кутового положення через третій блок підсилювача з'єднаний з третім входом суматора, четвертий вхід суматора через другий блок підсилювача з'єднаний з виходом датчика кутової швидкості, вихід рульової машини через зворотний зв'язок підключений до п'ятого входу суматора, вхід датчика кутової швидкості з'єднаний з виходом літального апарата, вхід датчика кутового положення з'єднаний з виходом літального апарата, згідно до корисної моделі в неї введено послідовно з'єднані блоки виявлення відмов, діагностики і прийняття та виконання рішення, перший вхід блока виявлення відмов з'єднаний з виходом блока порівняння, другий вхід блока виявлення відмов з'єднаний з виходом датчика кутового положення, третій вхід блока виявлення відмов з'єднаний з виходом датчика кутової швидкості, а вихід блока прийняття та виконання рішення з'єднаний з другим входом суматора. Суть корисної моделі пояснюється кресленням, де показана функціональна схема корисної моделі системи управління кутом тангажа літального апарата. Запропонована система управління кутом тангажа ЛА містить послідовно з'єднані блок 1 задатчика сигналу тангажа, блок 2 порівняння, інтегратор 3, перший блок 4 підсилювача K інт , суматор 5, підсилювач 6 рульової машини, рульову машину 7, руль висоти 8, літальний апарат 9, а також містить другий 10 та третій 11 блоки підсилювачів K і K , зворотний зв'язок 12, датчик кутової швидкості 13, датчик кутового положення 14, при цьому другий вхід блока 2 порівняння з'єднаний з виходом датчика кутового положення 14, вихід датчика кутового положення 14 через третій блок 11 підсилювача K з'єднаний з третім входом суматора 5, четвертий вхід суматора 5 через другий блок 10 підсилювача K з'єднаний з виходом датчика 1 UA 98659 U 5 10 кутової швидкості 13, вихід рульової машини 7 через зворотний зв'язок 12 підключений до п'ятого входу суматора 5, вхід датчика кутової швидкості 13 з'єднаний з виходом літального апарата 9, вхід датчика кутового положення 14 з'єднаний з виходом літального апарата 9, а також послідовно з'єднані блоки виявлення відмов 15, діагностики 16 і прийняття та виконання рішення 17, перший вхід блока 15 виявлення відмов з'єднаний з виходом блока 2 порівняння, другий вхід блока 15 виявлення відмов з'єднаний з виходом датчика кутового положення 14, третій вхід блока 15 виявлення відмов з'єднаний з виходом датчика кутової швидкості 13, а вихід блока 12 прийняття та виконання рішення з'єднаний з другим входом суматора 5. Система управління кутом тангажа ЛА працює таким чином. З задатчика 1 сигнал тангажа (U зад) надходить на перший вхід блока 2 порівняння. На виході блока 2 порівняння формується сигнал неузгодженості по тангажу (ΔU), який надходить через інтегратор 3 і перший блок 4 підсилювача K інт на перший вхід суматора 5. На виході суматора 5 формується керуючий сигнал: K K K dt . (1) в z інт 15 У суматорі 5 формується сигнал неузгодженості між керуючим сигналом і сигналом з виходу зворотного зв'язку 12, який через підсилювач 6 рульової машини надходить на вхід рульової машини 7. Рульова машина 7 відхиляє руль висоти 8, в результаті відбувається зміна кутового положення літального апарата 9. Сигнал кутової швидкості ( z ), виміряний датчиком кутової швидкості 13, надходить через 20 другий блок 10 підсилювача K на четвертий вхід суматора 5. Початкове значення кута , виміряний датчиком кутового положення 14, надходить на другий вхід блока 2 порівняння і через третій блок 11 підсилювача K надходить на третій вхід суматора 5. Сигнал неузгодженості по тангажу (ΔU), сигнали з датчика кутової швидкості ( U z ) і датчика кутового положення ( U ) надходять на вхід блока 15 виявлення відмов. Сигнал з блока 15 тангажа 25 виявлення відмов надходить на вхід блока 16 діагностики, де відбувається діагностика отриманих даних. Сигнал з блока 16 діагностики надходить на вхід блока 17 прийняття та виконання рішення. Якщо відбулася відмова хоча б одного з датчиків, то блок 17 прийняття та виконання рішення приймає рішення про метод парирування відмов. У разі обриву проводів датчика кутового положення 14 сигнал з датчика кутової швидкості ( U z ) інтегрується, а у разі 30 обриву 35 датчика кутової швидкості 13 сигнал з датчика кутового положення ( U ) диференціюється. Якщо відбувся зсув характеристики відносно осі абсцис або ординат, чи відбулося зменшення коефіцієнта одного з датчиків, блок 17 прийняття та виконання рішення приймає рішення та виконує відновлення статичної характеристики датчика. Сигнал з блока 17 прийняття та виконання рішення поступає на другий вхід суматора 5. Передавальна функція заявленої системи управління кутом тангажа при ідеальному автопілоті, незмінному векторі швидкості (що припустимо для високошвидкісних ЛА при високих вимогах до швидкодії системи управління) і постійному нульовому куті крену має наступний вигляд: Mz K інт s (2) W / зад s z 3 зад s Mz K Mz s 2 M K M s M K s z z інт z 40 45 z де Mz , Mz , Mz - приведені до моменту інерції ЛА щодо поперечної осі Z похідні аеродинамічних моментів навколо цієї осі. Таким чином, поставлена задача підвищення відмовостійкості системи управління кутом тангажа літального апарата повністю вирішується за допомогою наявності в системі блока виявлення відмов, блока діагностики і блока прийняття та виконання рішення, які вирішують задачі парирування відмов датчика кутової швидкості або датчика кутового положення. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 Система управління кутом тангажа літального апарата, що містить послідовно з'єднані блок задатчика сигналу тангажа, блок порівняння, інтегратор, перший блок підсилювача, суматор, підсилювач рульової машини, рульову машину, руль висоти, літальний апарат, а також містить другий та третій блоки підсилювачів, зворотний зв'язок, датчик кутової швидкості, датчик 2 UA 98659 U 5 10 кутового положення, при цьому другий вхід блока порівняння з'єднаний з виходом датчика кутового положення, вихід датчика кутового положення через третій блок підсилювача з'єднаний з третім входом суматора, четвертий вхід суматора через другий блок підсилювача з'єднаний з виходом датчика кутової швидкості, вихід рульової машини через зворотний зв'язок підключений до п'ятого входу суматора, вхід датчика кутової швидкості з'єднаний з виходом літального апарата, вхід датчика кутового положення з'єднаний з виходом літального апарата, яка відрізняється тим, що в неї введено послідовно з'єднані блоки виявлення відмов, діагностики і прийняття та виконання рішення, перший вхід блока виявлення відмов з'єднаний з виходом блока порівняння, другий вхід блока виявлення відмов з'єднаний з виходом датчика кутового положення, третій вхід блока виявлення відмов з'єднаний з виходом датчика кутової швидкості, а вихід блока прийняття та виконання рішення з'єднаний з другим входом суматора. Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюSymonov Volodymyr Fedorovych
Автори російськоюСимонов Владимир Федорович
МПК / Мітки
МПК: B64C 13/18, G05D 1/08
Мітки: кутом, управління, тангажа, система, апарата, літального
Код посилання
<a href="https://ua.patents.su/5-98659-sistema-upravlinnya-kutom-tangazha-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система управління кутом тангажа літального апарата</a>
Відмовостійка система кутової стабілізації безпілотного літального апарата
Номер патенту: 63176
Опубліковано: 26.09.2011
Автори: Симонов Володимир Федорович, Бойко Євгенія Анатоліївна
МПК: G05D 1/03
Мітки: кутової, апарата, система, безпілотного, відмовостійка, стабілізації, літального
Формула / Реферат:
Відмовостійка система кутової стабілізації безпілотного літального апарата, що містить задавальний пристрій, вихід якого з'єднаний з першим входом першого суматора, вихід якого з'єднаний з регулятором, вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з сервоприводом, вихід якого з'єднаний з безпілотним літальним апаратом, дані про кут тангажа та кутову швидкість подаються на датчик кута тангажа та датчик кутової...
Система керування безпілотного літального апарата

Номер патенту: 65814
Опубліковано: 12.12.2011
Автори: Фірсов Сергій Миколайович, Антонєвич Ганна Олександрівна, Кописов Олег Едуардович
МПК: B64C 13/00
Мітки: літального, керування, безпілотного, апарата, система
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також трьох датчиків кута та трьох датчиків кутової швидкості, виходи яких з'єднані з входами відповідно першого, п'ятого, шостого, другого, сьомого, восьмого нормуючих підсилювачів,...
Система керування безпілотного літального апарата
Номер патенту: 45231
Опубліковано: 26.10.2009
Автори: Симонов Володимир Федорович, Честних Тимур Володимирович
МПК: G05D 1/03, B64C 13/00
Мітки: літального, апарата, безпілотного, система, керування
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також датчиків кута та кутової швидкості, виходи яких з'єднані з входами відповідно першого та другого нормуючих підсилювачів, виходи яких з'єднані з другим та третім входами мультиплексора,...
Відмовостійка система кутової стабілізації безпілотного літального апарата
Номер патенту: 75971
Опубліковано: 25.12.2012
Автори: Субота Анатолій Максимович, Андрущенко Тетяна Миколаївна, Красножон Олександра Володимирівна, Кулік Анатолій Степанович
МПК: G05G 7/00
Мітки: апарата, стабілізації, літального, відмовостійка, система, безпілотного, кутової
Формула / Реферат:
Відмовостійка система кутової стабілізації безпілотного літального апарата, що містить задавальний пристрій, суматори, регулятор, сервопривод, датчики кута тангажа і кутової швидкості, електронні ключі, індикатори відмови, диференціатор, інтегратор, яка відрізняється тим, що введено перший фільтр, вхід якого з'єднаний з першим входом датчика кута тангажа, вихід якого через диференціатор з'єднаний з першим входом другого електронного ключа,...
Система керування безпілотного літального апарата
Номер патенту: 53726
Опубліковано: 11.10.2010
Автори: Кулік Анатолій Степанович, Єрмакова Вікторія Валеріївна, Бекетов Антон Сергійович, Кописов Олег Едуардович, Фірсов Сергій Миколайович
МПК: B64C 13/00
Мітки: апарата, літального, керування, система, безпілотного
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також датчика кута та датчика кутової швидкості, виходи яких з'єднані з входами відповідно першого та другого нормуючих підсилювачів, датчика напруги, вхід якого з'єднаний з другим виходом...
Попередній патент: Спосіб прогнозування ефективності променевої терапії у хворих на рак прямої кишки
Наступний патент: Система управління колісним транспортним роботом
Випадковий патент: Прес