Гідравлічна система із середовищем під тиском (варіанти) та спосіб її застосування
Номер патенту: 103207
Опубліковано: 25.09.2013
Автори: Ліньяма Матті, Віхтанен Ханну-Пекка, Сіпола Арі, Лааманен Арто
Формула / Реферат
1. Гідравлічна система із середовищем під тиском, яка містить:
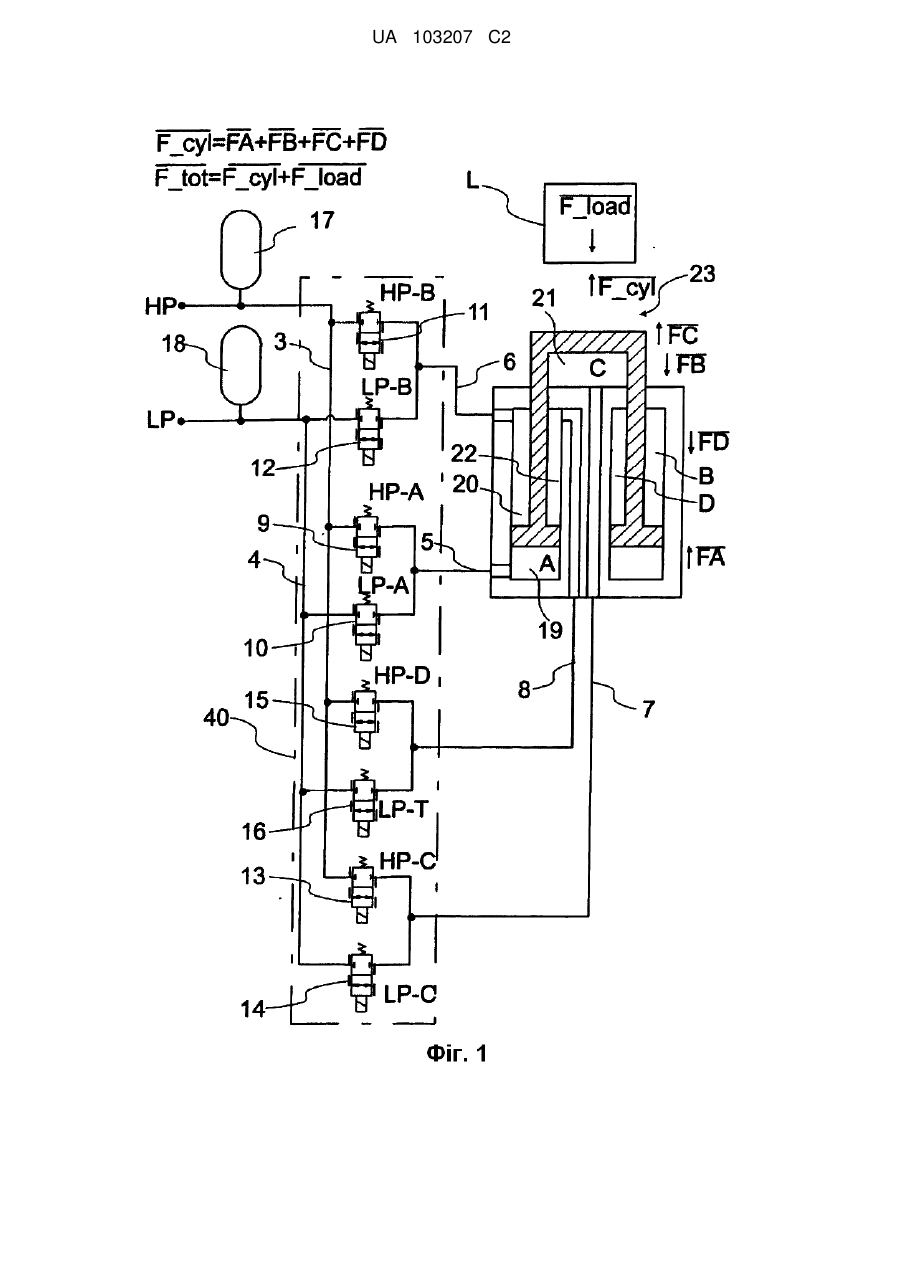
принаймні один виконавчий механізм (23) або блок виконавчих механізмів, за допомогою якого можна створювати сумарні сили (Fcyl), що діють на навантаження;
принаймні дві робочі камери, які діють за принципом витіснення, розміщені у зазначеному виконавчому механізмі або блоці виконавчого механізму,
яка відрізняється тим, що містить також:
принаймні одне зарядне коло (НРі, НРіа) вищого тиску, яке є джерелом гідравлічної енергії і яке може створювати та приймати об'ємну витрату при заданому рівні тиску;
принаймні одне зарядне коло (LPi, LPia) нижчого тиску, яке є джерелом гідравлічної енергії і яке може створювати та приймати об'ємну витрату при заданому рівні тиску;
принаймні дві задані робочі камери (19, 20, 21, 22), які належать до зазначених робочих камер,
коло керування (40), за допомогою якого принаймні одне із зазначених зарядних кіл вищого тиску (НРі, НРіа) і принаймні одне із зазначених зарядних кіл нижчого тиску (LPi, LPia) можуть по черзі підключатися до кожної із заданих робочих камер (19, 20, 21, 22), де кожна задана робоча камера (19, 20, 21, 22) виконана з можливістю створення складових сили (FA, FB, FC, FD), що відповідають заданим рівням тиску зарядних кіл (НРі, НРіа, LPi, LPia), що мають підключатися до зазначеної заданої робочої камери, і де кожна складова сили складає принаймні одну із зазначених сумарних сил у комбінації зі складовими сили, згенерованими іншими заданими робочими камерами,
де коло керування (40) містить керований керуючий інтерфейс (9, 11, 13, 15) для кожної заданої робочої камери (19, 20, 21, 22), причому за допомогою цього інтерфейсу підключення до зазначеного зарядного кола вищого тиску (НРі, НРіа) може відкриватися і закриватися, і другий керований керуючий інтерфейс (10, 12, 14, 16), за допомогою якого підключення до зазначеного зарядного кола нижчого тиску (НРі, НРіа) може відкриватися і закриватися;
де кожний керований керуючий інтерфейс містить двопозиційний керований відсічний клапан або декілька двопозиційних керованих відсічних клапанів, підключених паралельно.
2. Система за п. 1, яка відрізняється тим, що принаймні два із зазначених зарядних кіл (НРі, НРіа, LPi, LPia) здатні приймати об'ємну витрату із заданої робочої камери, до якої зарядне коло підключене, щоб створити складову силу.
3. Система за п. 1 або 2, яка відрізняється тим, що зазначений виконавчий механізм (23) або блок виконавчих механізмів здійснює регулювання навантаження (L), створюючи сумарні сили (Fcyl), що діють на навантаження і є змінними, причому для зазначеного регулювання й у кожний момент часу для використання кожною заданою робочою камерою вибирається одна із зазначених складових сили.
4. Система за будь-яким із пп. 1-3, яка відрізняється тим, що коло керування (40) містить перший керований керуючий інтерфейс (9) для кожної заданої робочої камери, причому за допомогою цього інтерфейсу підключення до зазначеного зарядного кола вищого тиску (НРі, НРіа) може відкриватися і закриватися, і другий керований керуючий інтерфейс (10), за допомогою якого підключення до зазначеного зарядного кола нижчого тиску (НРі, НРіа) може відкриватися і закриватися.
5. Система за будь-яким із пп. 1-4, яка відрізняється тим, що коло керування (40) містить кілька керуючих інтерфейсів, конструктивно виконаних для подачі гідравлічної енергії зарядних кіл до заданих робочих камер.
6. Система за будь-яким із пп. 1-5, яка відрізняється тим, що зазначене коло керування (40) конструктивно виконане для підключення одного із зарядних кіл до однієї із зазначених заданих робочих камер для подачі гідравлічної енергії й одночасно для підключення іншого зарядного кола до ще однієї із зазначених заданих робочих камер для повернення об'ємної витрати одночасно до зазначеного другого зарядного кола.
7. Система за будь-яким із пп. 1-6, яка відрізняється тим, що зазначений виконавчий механізм або блок виконавчих механізмів разом із колом керування є пристроєм для зарядки енергії, що виконаний з можливістю перетворення гідравлічної енергії будь-якого зарядного кола на потенційну енергію для зберігання, та перетворення збереженої потенційної енергії назад на гідравлічну енергію в зарядне коло, у разі потреби.
8. Система за будь-яким із пп. 1-7, яка відрізняється тим, що кожне зарядне коло містить акумулятор тиску (17, 18).
9. Система за будь-яким із пп. 1-8, яка відрізняється тим, що система містить також:
принаймні один помповий агрегат (111), який використовує середовище під тиском і створює гідравлічну енергію;
і систему регулюючих і запобіжних клапанів (124), за допомогою якої зазначений помповий агрегат може підключатися до зазначених зарядних кіл, по одному або кілька одночасно або для подачі гідравлічної енергії в одне або кілька зарядних кіл, або для одержання середовища під тиском з одного або кількох зарядних кіл, або для виконання обох цих операцій одночасно.
10. Система за п. 9, яка відрізняється тим, що:
зазначений помповий агрегат (111) містить всмоктувальну лінію (119) і напірну лінію (118); і
зазначена система регулюючих і запобіжних клапанів (124) конструктивно виконана для підключення напірної лінії (118) до одного із зарядних кіл для підвищення його рівня тиску і підтримування його на заданому рівні тиску;
і зазначена система регулюючих і запобіжних клапанів конструктивно виконана також для підключення всмоктувальної лінії (119) до одного із зарядних кіл для зниження його рівня тиску і підтримування його на заданому рівні тиску.
11. Система за будь-яким із пп. 1-10, яка відрізняється тим, що відношення площ робочих поверхонь зазначених заданих робочих камер відповідають ряду NM, де N - число зазначених зарядних кіл, М - число зазначених заданих робочих камер, причому N і М є цілими числами.
12. Система за будь-яким із пп. 1-11, яка відрізняється тим, що рівень тиску принаймні одного зарядного кола вищого рівня і принаймні одного зарядного кола нижчого рівня від зазначених є регульованим, причому відносні різниці між зазначеними створюваними сумарними силами є також регульованими, при цьому рівні тиску зазначених зарядних кіл виконані такими, щоб відповідати сумарним силам, потрібним для регулювання навантаження (L) оптимізованим чином.
13. Система за будь-яким із пп. 1-12, яка відрізняється тим, що зазначений виконавчий механізм або блок виконавчих механізмів для регулювання навантаження виконаний з можливістю прискорення зазначеного навантаження однією або кількома сумарними силами і уповільнювання зазначеного навантаження однією або кількома сумарними силами.
14. Система за п. 13, яка відрізняється тим, що принаймні одна із зазначених заданих робочих камер виконана з можливістю перетворення кінетичної енергії навантаження в гідравлічну енергію і подачі її в одне із зазначених зарядних кіл в разі уповільнення навантаження.
15. Система за будь-яким із пп. 1-14, яка відрізняється тим, що зазначений виконавчий механізм або блок виконавчих механізмів є частиною перетворювача тиску (112), що має два гідравлічні циліндрові виконавчі механізми із з'єднаними штоками поршнів, що виконаний з можливістю перетворення гідравлічної енергії зарядного кола у гідравлічну енергію іншого зарядного кола, за допомогою якого гідравлічна енергія зарядного кола може перетворюватися на гідравлічну енергію іншого зарядного кола.
16. Система за будь-яким із пп. 1-15, яка відрізняється тим, що містить також перетворювач тиску (112), що являє собою цифровий гідравлічний виконавчий механізм та має два циліндрові виконавчі механізми із з'єднаними штоками поршнів, що виконаний з можливістю перетворення гідравлічної енергії зарядного кола у гідравлічну енергію іншого зарядного кола, за допомогою якого гідравлічна енергія може передаватися принаймні з одного зарядного кола принаймні до одного зарядного кола, причому система містить також:
принаймні одне субзарядне коло вищого тиску (НРіа);
принаймні одне субзарядне коло (LPi, LPia) нижчого тиску, яке є джерелом гідравлічної енергії;
принаймні один допоміжний виконавчий механізм (23) або допоміжний блок виконавчих механізмів, які являють собою навантаження;
принаймні одну допоміжну робочу камеру, що діє за принципом витіснення і розміщена у зазначеному допоміжному виконавчому механізмі або допоміжному блоці виконавчих механізмів;
коло керування (40), за допомогою якого зазначені субзарядні кола (НРіа, LPla) можуть підключатися по черзі до кожної допоміжної робочої камери, причому кожна із зазначених допоміжних робочих камер здатна створювати тиск й об'ємну витрату до того субзарядного кола (НРіа, LPla), до якого підключена зазначена допоміжна робоча камера, і причому зазначений виконавчий механізм або блок виконавчих механізмів конструктивно виконаний для переміщення зазначеного допоміжного виконавчого механізму або допоміжного блока виконавчих механізмів для передачі гідравлічної енергії.
17. Система за п. 16, яка відрізняється тим, що зазначений виконавчий механізм (23) містить першу рухому частину, а допоміжний виконавчий механізм містить другу рухому частину, причому зазначені рухомі частини з'єднані для передачі переміщення між зазначеним виконавчим механізмом і зазначеним допоміжним виконавчим механізмом.
18. Система за п. 16 або 17, яка відрізняється тим, що до кожної заданої робочої камери і кожної допоміжної робочої камери можуть по черзі підключатися принаймні три зарядні кола, задані рівні тиску яких відрізняються один від одного.
19. Система за будь-яким із пп. 16-18, яка відрізняється тим, що пристрій містить також коло керування (125, 126), за допомогою якого принаймні одне із зазначених зарядних кіл вищого тиску (НРі) може підключатися до допоміжного виконавчого механізму замість виконавчого механізму (23), й одночасно принаймні одне із субзарядних кіл нижчого тиску (LPia) може підключатися до зазначеного виконавчого механізму (23) замість допоміжного виконавчого механізму, і за допомогою якого принаймні одне з зазначених зарядних кіл нижчого тиску (LPi) може підключатися до допоміжного виконавчого механізму замість виконавчого механізму (23) й одночасно принаймні одне із субзарядних кіл вищого тиску (НРіа) може підключатися до зазначеного виконавчого механізму замість допоміжного виконавчого механізму, причому у перетворювачі тиску може створюватися зворотно-поступальний рух, за допомогою якого без перерви можуть створюватися тиск і об'ємна витрата.
20. Система за будь-яким із пп. 16-19, яка відрізняється тим, що рухомі частини виконавчого механізму (23) і допоміжного виконавчого механізму є з'єднаними штоками поршнів.
21. Система за будь-яким із пп. 16-20, яка відрізняється тим, що пристрій містить коло керування (126), за допомогою якого будь-яке зарядне коло може підключатися до будь-якої із заданих робочих камер, та яке виконано з можливістю передачі енергії з двох або більше зарядних кіл до одного або кількох інших зарядних кіл, або з одного або кількох зарядних кіл до двох або більше інших зарядних кіл, або з двох або більше зарядних кіл до двох або більше інших зарядних кіл з використанням кількох альтернативних коефіцієнтів перетворення.
22. Система за будь-яким із пп. 1-21, яка відрізняється тим, що система містить також:
- принаймні один пристрій регулювання (24), що являє собою процесор, придатний для обробки сигналів і керований програмним забезпеченням, виконаний з можливістю підключення до виконавчого механізму та регулювання сумарної сили, створюваної виконавчим механізмом або блоком виконавчих механізмів, який розміщений для керування зазначеним колом керування (40) і має як свої вхідні дані директивне значення (31) для сумарної сили, що має бути створеною, прискорення навантаження, швидкості навантаження або положення навантаження;
причому зазначений пристрій регулювання також виконаний з можливістю регулювання у кожний момент часу підключень, здійснених зазначеним колом керування (40) таким чином, що створювані складові сил створюють сумарну силу, яка відповідає зазначеному директивному значенню (31) або близько пов'язана із ним.
23. Система за п. 22, яка відрізняється тим, що зазначений пристрій регулювання виконаний з можливістю зберігання даних про стани зазначеного кола керування (40), причому кожний зі станів представляє підключення зазначеного кола керування для створення однієї сумарної сили, причому зазначений пристрій регулювання призначений задавати стани кола керування у такому порядку, що пропорційно відповідає шаховому порядку сумарних сил, що мають бути створені; і причому вихідними даними зазначеного пристрою регулювання є контрольні значення (37, 39), що мають бути передані зазначеному колу керування для настройки зазначеного кола керування у такому стані, який відповідає зазначеному директивному значенню (31) у кожній ситуації навантаження.
24. Система за п. 23, яка відрізняється тим, що коло керування (40) містить принаймні один керований керуючий інтерфейс (9), за допомогою якого підключення до будь-якого зарядного кола (НРі, HPia, LPi, LPia) може відкриватися і закриватися.
25. Система за п. 24, яка відрізняється тим, що пристрій регулювання виконаний з можливістю контролю стану зазначеного керуючого інтерфейсу і перевірки, чи відповідає його стан стану відповідно до контрольного значення, і висновку, чи наявна ситуація відмови зазначеного керуючого інтерфейсу.
26. Система за будь-яким із пп. 22-25, яка відрізняється тим, що зазначений пристрій регулювання виконаний з можливістю зберігання даних про стани зазначених робочих камер, причому кожен зі станів представляє підключення заданих робочих камер для створення однієї сумарної сили і контрольні значення, що відповідають їм, масштабовані у порядку, що пропорційно відповідає поступовому порядку сумарних сил, що мають бути створені.
27. Система за будь-яким із пп. 17-26, яка відрізняється тим, що містить також принаймні одне зарядне коло проміжного тиску (МРі, МРіа), яке є джерелом гідравлічної енергії, яке може створювати та приймати об'ємну витрату при заданому рівні тиску, і рівень тиску якого знаходиться між зазначеним вищим тиском і зазначеним нижчим тиском.
28. Система за будь-яким із пп. 1-27, яка відрізняється тим, що зазначений виконавчий механізм являє собою виконавчий механізм (45) поворотного пристрою (41), для регулювання повороту навантаження (L), підключеного до зазначеного поворотного пристрою, причому є принаймні два виконавчих механізми (45, 46), і вони створюють змінний повний момент (Mtot), що діє на навантаження, і, крім того, поворотний пристрій містить елементи (47) для перетворення лінійних рухів, створюваних зазначеними виконавчими механізмами, на обертальний рух навантаження.
29. Система за будь-яким із пп. 1-18, яка відрізняється тим, що зазначений виконавчий механізм з керованою силою або регульованою силою, реалізований способом регулювання без дроселювання, являє собою виконавчий механізм (50, 51, 52, 53) помпи-мотора, причому момент навантаження з напрямком, протилежним напрямку обертання, створюється на привідному валу, підключеному до зовнішнього джерела енергії, такого, як привідний двигун, причому зазначений виконавчий механізм діє як помпа у комбінації з іншими виконавчими механізми, підключеними до того самого ексцентрика.
30. Система за будь-яким із пп. 1-29, яка відрізняється тим, що зазначений виконавчий механізм являє собою виконавчий механізм (50, 51, 52, 53) обертового пристрою для регулювання обертального руху навантаження, підключеного до зазначеного обертового пристрою, причому число виконавчих механізмів є принаймні два, і обертовий пристрій містить також елементи (54, 55) для перетворення лінійних рухів, створюваних зазначеними виконавчими механізмами, на обертальний рух навантаження.
31. Гідравлічна система із середовищем під тиском, що має поворотний пристрій для регулювання повороту навантаження, яка містить:
принаймні два виконавчих механізми (45, 46) або блоки виконавчих механізмів, за допомогою яких сумарні сили, що діють на навантаження (L), можуть створюватися для регулювання повороту навантаження (L),
принаймні дві робочі камери, які діють за принципом витіснення, розміщені у зазначених виконавчих механізмах або блоках виконавчих механізмів,
елементи (45, 46, 47) для перетворення рухів, створюваних зазначеними виконавчими механізмами або блоками виконавчих механізмів, на обертальний рух навантаження і для перетворення створюваних сумарних сил на повний момент (Mtot), що діє на навантаження;
яка відрізняється тим, що містить також:
принаймні одне зарядне коло (НРі, НРіа) вищого тиску, яке є джерелом гідравлічної енергії і яке може створювати та приймати об'ємну витрату при заданому рівні тиску;
принаймні одне зарядне коло (LPi, LPia) нижчого тиску, яке є джерелом гідравлічної енергії і яке може створювати та приймати об'ємну витрату при заданому рівні тиску;
принаймні дві задані робочі камери, які належать до зазначених робочих камер; і
коло керування (40), за допомогою якого принаймні одне із зазначених зарядних кіл вищого тиску (НРі, НРіа) і принаймні одне із зазначених зарядних кіл нижчого тиску (LPi, LPia) можуть по черзі підключатися до кожної заданої робочої камери, де кожна задана робоча камера виконана з можливістю створення складових сили, що відповідають заданим рівням тиску зарядних кіл (НРі, НРіа, LPi, LPia), що мають підключатися до зазначеної заданої робочої камери, де кожна складова сили складає принаймні одну з зазначених сумарних сил у комбінації зі складовими сили, згенерованими іншими заданими робочими камерами,
де коло керування (40) містить керований керуючий інтерфейс (9, 11, 13, 15) для кожної заданої робочої камери (19, 20, 21, 22), причому за допомогою цього інтерфейсу підключення до зазначеного зарядного кола вищого тиску (НРі, НРіа) може відкриватися і закриватися, і другий керований керуючий інтерфейс (10, 12, 14, 16), за допомогою якого підключення до зазначеного зарядного кола нижчого тиску (НРі, НРіа) може відкриватися і закриватися;
де кожний керований керуючий інтерфейс містить двопозиційний керований відсічний клапан або декілька двопозиційних керованих відсічних клапанів, підключених паралельно.
32. Гідравлічна система за п. 31, яка відрізняється тим, що поворотний пристрій містить принаймні чотири задані робочі камери, які належать до зазначених робочих камер, при цьому відношення площ робочих поверхонь зазначених робочих камер відповідають ряду NM, де N - число зазначених зарядних кіл, М - число зазначених заданих робочих камер, причому N і М є цілими числами.
33. Гідравлічна система за п. 31 або 32, яка відрізняється тим, що зазначені виконавчі механізми або блоки виконавчих механізмів являють собою циліндрові виконавчі механізми в однаковому положенні, які створюють сумарні сили у протилежних напрямках, при цьому поворотний пристрій містить поворотне зубчасте колесо, за допомогою якого зазначені сумарні сили можуть перетворюватися на відповідні повні моменти (Mtot), і причому зазначені виконавчі механізми або блоки виконавчих механізмів, що мають зубчасті рейки, розміщені з протилежних боків зазначеного поворотного зубчастого колеса.
34. Гідравлічна система за будь-яким із пп. 31-33, яка відрізняється тим, що поворотний пристрій містить також принаймні один пристрій регулювання (24), що має як свої вхідні дані директивне значення (31) для сумарної сили, що має бути створена, виконаний з можливістю регулювання сили поворотного пристрою, регулювання зазначеного кола керування (40), а також з можливістю регулювання у кожний момент часу підключень, здійснених зазначеним колом керування (40) таким чином, що створювані складові сил створюють сумарну силу, яка відповідає зазначеному директивному значенню (31) або близько пов'язана із ним.
35. Гідравлічна система із середовищем під тиском, що має обертовий пристрій для регулювання обертання навантаження, яка містить:
принаймні два виконавчі механізми (50, 51, 52, 53) або блоки виконавчих механізмів, за допомогою яких повні моменти (Mtot), що діють на навантаження (L), можуть створюватися для регулювання повороту навантаження (L),
принаймні дві робочі камери, які діють за принципом витіснення, розміщені у зазначених виконавчих механізмах або блоках виконавчих механізмів,
елементи (54, 55) для перетворення рухів, створюваних зазначеними виконавчими механізмами або блоками виконавчих механізмів, на обертальний рух навантаження;
яка відрізняється тим, що містить також:
принаймні одне зарядне коло (НРі, НРіа) вищого тиску, яке є джерелом гідравлічної енергії і яке може створювати та приймати об'ємну витрату при заданому рівні тиску;
принаймні одне зарядне коло (LPi, LPia) нижчого тиску, яке є джерелом гідравлічної енергії і яке може створювати та приймати об'ємну витрату при заданому рівні тиску;
принаймні дві задані робочі камери, які належать до зазначених робочих камер; і
коло керування (40), за допомогою якого принаймні одне із зазначених зарядних кіл вищого тиску (НРі, НРіа) і принаймні одне із зазначених зарядних кіл нижчого тиску (LPi, LPia) можуть по черзі підключатися до кожної заданої робочої камери, де кожна задана робоча камера виконана з можливістю створення складових сили (FA, FB, FC, FD), що відповідають заданим рівням тиску зарядних кіл (НРі, НРіа, LPi, LPia), що мають підключатися до зазначеної заданої робочої камери, де кожна складова сили складає принаймні одну з зазначених сумарних сил у комбінації зі складовими сили, згенерованими іншими заданими робочими камерами,
де коло керування (40) містить керований керуючий інтерфейс (9, 11, 13, 15) для кожної заданої робочої камери (19, 20, 21, 22), причому за допомогою цього інтерфейсу підключення до зазначеного зарядного кола вищого тиску (НРі, НРіа) може відкриватися і закриватися, і другий керований керуючий інтерфейс (10, 12, 14, 16), за допомогою якого підключення до зазначеного зарядного кола нижчого тиску (НРі, НРіа) може відкриватися і закриватися;
де кожний керований керуючий інтерфейс містить двопозиційний керований відсічний клапан або декілька двопозиційних керованих відсічних клапанів, підключених паралельно.
36. Гідравлічна система за п. 35, яка відрізняється тим, що ексцентриковий обертовий пристрій містить принаймні чотири зазначені виконавчі механізми або блоки виконавчих механізмів і принаймні чотири зазначені задані робочі камери.
37. Гідравлічна система за п. 35 або 36, яка відрізняється тим, що відношення площ робочих поверхонь зазначених заданих робочих камер відповідають ряду NM, де N - число зазначених зарядних кіл, М - число зазначених заданих робочих камер, причому N і М є цілими числами.
38. Гідравлічна система за будь-яким із пп. 35-37, яка відрізняється тим, що обертовий пристрій містить також принаймні один пристрій регулювання (24), що має як свої вхідні дані директивне значення (31) для повного моменту, що має бути створений, виконаний з можливістю регулювання сили поворотного пристрою, регулювання зазначеного кола керування (40), а також з можливістю регулювання у кожний момент часу підключень, здійснених зазначеним колом керування (40) таким чином, що створювані складові сил створюють повний момент, який відповідає зазначеному директивному значенню (31) або близько пов'язаний із ним.
39. Гідравлічна система за будь-яким із пп. 35-38, яка відрізняється тим, що принаймні одна з зазначених заданих робочих камер виконана з можливістю створення гідравлічної енергії і подачі її в одне з зазначених зарядних кіл під час повороту навантаження.
40. Спосіб застосування гідравлічної системи із середовищем під тиском, при якому:
забезпечують принаймні один виконавчий механізм (23) або блок виконавчих механізмів, за допомогою якого можна створювати сумарні сили (Fcyl), що діють на навантаження;
забезпечують принаймні дві робочі камери, які діють за принципом витіснення, розміщені у зазначеному виконавчому механізмі або блоках виконавчого механізму,
який відрізняється тим, що при ньому також:
забезпечують принаймні одне зарядне коло (НРі, НРіа) вищого тиску, яке є джерелом гідравлічної енергії і яке може створювати та приймати об'ємну витрату при заданому рівні тиску;
забезпечують принаймні одне зарядне коло (LPi, LPia) нижчого тиску, яке є джерелом гідравлічної енергії і яке може створювати та приймати об'ємну витрату при заданому рівні тиску;
забезпечують принаймні дві задані робочі камери (19, 20, 21, 22), які належать до зазначених робочих камер,
забезпечують коло керування (40), за допомогою якого принаймні одне із зазначених зарядних кіл вищого тиску (НРі, НРіа) і принаймні одне із зазначених зарядних кіл нижчого тиску (LPi, LPia) можуть по черзі підключатися до кожної заданої робочої камери (19, 20, 21, 22),
де коло керування (40) містить керований керуючий інтерфейс (9, 11, 13, 15) для кожної заданої робочої камери (19, 20, 21, 22), причому за допомогою цього інтерфейсу підключення до зазначеного зарядного кола вищого тиску (НРі, НРіа) може відкриватися і закриватися, і другий керований керуючий інтерфейс (10, 12, 14, 16), за допомогою якого підключення до зазначеного зарядного кола нижчого тиску (НРі, НРіа) може відкриватися і закриватися;
де кожний керований керуючий інтерфейс містить двопозиційний керований відсічний клапан або декілька двопозиційних керованих відсічних клапанів, підключених паралельно;
причому спосіб включає:
стадію, на якій у кожній заданій робочій камері (19, 20, 21, 22) створюють складові сили (FA, FB, FC, FD), що відповідають заданим рівням тиску зарядних кіл (НРі, НРіа, LPi, LPia), що мають підключатися до зазначеної заданої робочої камери; і
стадію, на якій створюють за допомогою кожної складової сили принаймні одну з зазначених сумарних сил у комбінації зі складовими сили, згенерованими іншими заданими робочими камерами.
41. Спосіб за п. 40, який відрізняється тим, що при ньому також:
забезпечують принаймні один пристрій регулювання (24) для регулювання сумарної сили, створюваної виконавчим механізмом або блоком виконавчих механізмів, який розміщений для керування зазначеним колом керування (40) і має як свої вхідні дані директивне значення (31) для сумарної сили, що має бути створена, прискорення навантаження, швидкості навантаження або положення навантаження;
причому спосіб включає також:
стадію, на якій зазначений пристрій регулювання використовується для регулювання у кожний момент часу підключення, які здійснюють зазначеним колом керування (40) таким чином, що створюваними складовими силами створюють сумарну силу, яка відповідає зазначеному директивному значенню (31) або близько пов'язана із ним.
42. Гідравлічна система із середовищем під тиском, що має пристрій регулювання для регулювання системи, яка містить:
принаймні один виконавчий механізм (23) або блок виконавчих механізмів, за допомогою якого можна створювати сумарні сили (Fcyl), що діють на навантаження;
принаймні дві робочі камери, які діють за принципом витіснення, розміщені у зазначеному виконавчому механізмі або блоках виконавчого механізму,
яка відрізняється тим, що система із середовищем під тиском містить також:
принаймні одне зарядне коло (НРі, НРіа) вищого тиску, яке є джерелом гідравлічної енергії і яке може створювати та приймати об'ємну витрату при заданому рівні тиску;
принаймні одне зарядне коло (LPi, LPia) нижчого тиску, яке є джерелом гідравлічної енергії і яке може створювати та приймати об'ємну витрату при заданому рівні тиску;
принаймні дві задані робочі камери (19, 20, 21, 22), які належать до зазначених робочих камер,
коло керування (40), за допомогою якого принаймні одне із зазначених зарядних кіл вищого тиску (НРі, НРіа) і принаймні одне із зазначених зарядних кіл нижчого тиску (LPi, LPia) можуть по черзі підключатися до кожної заданої робочої камери (19, 20, 21, 22), причому в кожній заданій робочій камері можуть створюватися відповідні складові сили,
де коло керування (40) містить керований керуючий інтерфейс (9, 11, 13, 15) для кожної заданої робочої камери (19, 20, 21, 22), причому за допомогою цього інтерфейсу підключення до зазначеного зарядного кола вищого тиску (НРі, НРіа) може відкриватися і закриватися, і другий керований керуючий інтерфейс (10, 12, 14, 16), за допомогою якого підключення до зазначеного зарядного кола нижчого тиску (НРі, НРіа) може відкриватися і закриватися;
де кожний керований керуючий інтерфейс містить двопозиційний керований відсічний клапан або декілька двопозиційних керованих відсічних клапанів, підключених паралельно;
причому зазначений пристрій регулювання конструктивно виконаний:
для регулювання зазначеного кола керування (40) на основі вхідних даних, які являють собою директивне значення (31) для сумарної сили, що має бути створена, прискорення навантаження, швидкості навантаження або положення навантаження; і
для регулювання у кожний момент часу підключень, здійснених зазначеним колом керування (40) таким чином, що задані робочі камери створюють сумарну силу, яка відповідає зазначеному директивному значенню (31) або близько пов'язана із ним, таким чином, що комбінація кількох створених складових сили створює зазначену сумарну силу.
43. Гідравлічна система за п. 42, яка відрізняється тим, що пристрій регулювання виконаний з можливістю зберігання даних станів зазначеного кола керування (40), причому кожний зі станів представляє підключення зазначеного кола керування для створення однієї сумарної сили, причому зазначений пристрій регулювання призначений задавати стани кола керування у такому порядку, що пропорційно відповідає поступовому порядку сумарних сил, що мають бути створені; і причому вихідними даними зазначеного пристрою регулювання є контрольні значення (37, 39), що мають бути передані зазначеному колу керування для настройки зазначеного кола керування у такому стані, який відповідає зазначеному директивному значенню (31) у кожній ситуації навантаження.
44. Гідравлічна система за п. 42 або 43, яка відрізняється тим, що зазначений пристрій регулювання виконаний з можливістю зберігання даних станів зазначених заданих робочих камер, причому кожен зі станів представляє підключення заданих робочих камер виконавчого механізму для створення однієї сумарної сили і контрольні значення, що відповідають їм, масштабовані у порядку, що пропорційно відповідає поступовому порядку сумарних сил, що мають бути створені.
Текст
Реферат: Група винаходів належить до гідравлічних сервомеханізмів. Варіанти гідравлічної системи мають принаймні один виконавчий механізм (23) або блок виконавчих механізмів, за допомогою якого можна створювати сумарні сили (Fcyl). У виконавчому механізмі або блоках виконавчих механізмів розміщена принаймні одна робоча камера (19, 20, 21, 22), що діє за принципом витіснення. До системи входять зарядні кола вищого тиску (НРі, НРіа) і принаймні одне із зарядних кіл нижчого тиску (LPi, LPia). Вони можуть підключатися до принаймні однієї із робочих камер (19, 20, 21, 22) за допомогою кола керування (40). Подача тиску у робочі камери керується двопозиційними відсічними клапанами (9-16), які працюють попарно паралельно. Кожна із робочих камер (10, 20, 21, 22) створює складові сили (FA, FB, FC, FD), що відповідають тискам зарядних кіл (НРі, НРіа, LPi, LPia). Кожна складова сили створює принаймні одну із сумарних сил окремо або у комбінації зі складовими сили, створеними іншими робочими камерами виконавчого механізму або блока виконавчих механізмів. Таким чином усувається потреба у дроселюванні гідравлічної рідини для керування привідним зусиллям. Блок виконавчих механізмів являє собою, наприклад, поворотний пристрій або обертовий пристрій. Заявлений спосіб передбачає використання зазначених гідросистем. Винаходи сприяють зменшенню енергетичних втрат у гідросистемах. UA 103207 C2 (12) UA 103207 C2 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 60 Галузь винаходу Винахід відноситься до системи із середовищем під тиском. Винахід відноситься до поворотного пристрою для регулювання повороту навантаження. Винахід відноситься до обертового пристрою для регулювання обертання навантаження. Винахід відноситься до способу у системі із середовищем під тиском. Винахід відноситься до пристрою регулювання для регулювання системи із середовищем під тиском. Передумови винаходу У системах із середовищем під тиском навантаження регулюється за допомогою виконавчих механізмів з робочими камерами, які мають робочу поверхню, на яку діє тиск середовища під тиском і створює силу, яка через виконавчий механізм діє на навантаження. Величина цієї сили залежить як від площі робочої поверхні, на яку діє тиск, так і від тиску, який у звичайних системах із середовищем під тиском регулюється для створення перемінних сил. Типові приклади включають передавання, піднімання й опускання навантаження, а навантаження у фізичному вигляді може варіюватися від однієї системи до іншої, будучи, наприклад, частиною конструкції, пристроєм або системою, що треба перемістити. Регулювання тиском зазвичай основується на регулюванні з втратою, й у відомих рішеннях із реостатним регулюванням регулювання зусиллям виконавчого механізму досягається шляхом плавного регулювання тисків робочих камер. Таким чином, тиски керуються шляхом дроселювання потоків середовища під тиском, що входить до камери і виходить з неї. Регулювання реалізується, наприклад, за допомогою, наприклад, пропорційних клапанів. Зазвичай відомі системи мають бік нагнітання, де тиск регулюється, і яка створює об'ємну витрату середовища під тиском, і зворотний бік, здатний приймати об'ємну витрату, і де переважний рівень тиску є якомога низьким, так званий тиск у баку, щоб зменшити втрати. Відомі середовища під тиском включають, наприклад, мастило для гідравлічних систем, стиснене повітря й вода або робочі рідини для гідравлічних систем на основі води. Тип середовища під тиском не обмежується, але може мінятися залежно від потреб конкретного застосування і вимог, що висуваються. Проблеми, притаманні відомим системам, включають сприйнятливість до відмов і втрат енергії, особливо до втрат гідравлічної енергії і відмов клапанів регулювання. Стислий опис винаходу Метою винаходу є впровадження нового рішення для реалізації системи із середовищем під тиском, яке також дає значну економію енергії у порівнянні до більшості систем, що використовуються на разі. Винахід відноситься до рішення цифрової гідравлічною системи, основаного на способі регулювання без дроселювання, до пристроїв, застосовних у цифровій гідравлічній системі, включаючи, наприклад, блок перетворювача тиску, блок помпового перетворювача тиску, а також до способів, схем регулювання й пристроїв регулювання, застосовних для регулювання ними. Пропонована система із середовищем під тиском буде представлена у пункті 1 формули винаходу. Пропонований поворотний пристрій буде представлений у пункті 32 формули винаходу. Пропонований обертовий пристрій буде представлений у пункті 36 формули винаходу. Пропонований спосіб буде представлений у пункті 41 формули винаходу. Пропонований пристрій регулювання буде представлений у пункті 43 формули винаходу. Рішення системи конструктивно виконане для регулювання сили, прискорення, швидкості або положення, що створюються виконавчим механізмом, який приводиться середовищем під тиском, або для регулювання прискорення, моменту, прискорення обертового руху, кутової швидкості, положення або обертання сили, створюваної пристроєм, що містить кілька виконавчих механізмів. На додаток або альтернативно, пропонується рішення системи для регулювання одним або кількома пристроями для зарядки енергії. На додаток або альтернативно, пропонується рішення системи для регулювання одним або кількома блоками перетворювачів тиску і відповідними коефіцієнтами перетворення. На додаток або альтернативно, пропонується рішення системи для регулювання одним або кількома блоками перетворювачів енергії, особливо блоками перетворювачів тиску помп, і відповідними коефіцієнтами перетворення. Пропонується нове рішення цифрової гідравлічної системи, основане на способі регулювання без дроселювання, а також пристрої для використання у ній. Важливою ознакою цифрової гідравлічної системи є регенерація кінетичної або потенційної енергії, що під час робочих рухів виконавчого механізму повертається в зарядні кола. Контур середовища під тиском, який використовується у цифровій гідравлічній системі і який далі за текстом зватиметься також зарядною системою, містить два або більше контури тиску, 1 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 що мають різні рівні тиску і звуться також зарядними колами. Кожне зарядне коло типово містить одну або кілька ліній середовища під тиском, з'єднаних між собою і маючих однаковий тиск. У подальшому описі задля спрощення основна увага приділятиметься рішенню системи, що містить два зарядних кола. Фахівець у даній галузі техніки може легко застосувати представлені принципи й до рішення системи, що містить три або більше зарядних кіл. На представлених прикладах будуть розглянуті зарядне коло високого тиску й зарядне коло низького тиску, що означає не будь-який конкретний рівень абсолютного тиску, а, головним чином, різницю тиску зазначених зарядних кіл. Рівні тиску вибираються підходящими до кожного конкретного застосування. Якщо рішення системи містить кілька зарядних кіл високого тиску або зарядних кіл низького тиску, переважно, якщо й у цьому випадку рівні тиску зарядних кіл відрізняються один від одного. При розгляді зарядного кола високого тиску вживатимуться також скорочення ВТ, лінія ВТ або з'єднання ВТ; а при розгляді зарядного кола низького тиску вживатимуться також скорочення НТ, лінія НТ або з'єднання НТ. Енергія, яку потребують зарядні кола, подається одним або кількома зарядними пристроями. В одному прикладі енергія подається в зарядне коло через один або кілька перетворювачів тиску з одного або кількох інших зарядних кіл. Представлена система, яка містить два або більше зарядних кіл, спроможних подавати енергію, і яка використовує цифрові гідравлічні виконавчі механізми, основані на способі регулювання без дроселювання, називається цифровою гідравлічною системою низького опору (ЦГСНО). Енергія, що має подаватися з одного або кількох зарядних кіл нижчого рівня тиску (НТ), часто є суттєвою частиною енергії, що має використовуватися у системі, і через це рівні тиску зарядних кіл нижчого рівня тиску справляють значний вплив на вироблення енергії, керованість виконавчих механізмів і споживання ними енергії. Характерним для кожного зарядного кола є те, що воно здатне створювати необхідний тиск і як подавати, так і приймати об'ємну витрату. Переважно, рівні тиску різних зарядних кіл рівномірно є ступенево змінними. Термін "зарядний пристрій" означає контур середовища під тиском, що приносить енергію в зарядні кола зарядної системи ззовні зарядної системи за допомогою помпового агрегату. Зарядний пристрій містить помповий агрегат, а також систему клапанів регулювання і запобіжних клапанів, за допомогою яких всмоктувальна лінія і напірна лінія помпового агрегату можуть підключатися до будь-якого зарядного кола. Переважно, всмоктувальна лінія і напірна лінія можуть підключатися й до баку середовища під тиском. Нормально один або кілька пристроїв для зарядки енергії вищого рівня тиску підключені до зарядного кола ВТ, і, відповідно, один або кілька пристроїв для зарядки енергії вищого рівня тиску підключені до зарядного кола НТ. Зарядним пристроєм є, наприклад, гідравлічний акумулятор або інший акумулятор енергії, який використовує, наприклад, зусилля пружини або силу тяжіння, що діє на навантаження, тобто, потенційну енергію. Акумулятор потенційної енергії і цифровий гідравлічний виконавчий механізм, підключений до нього, можуть використовуватися як пристрій для зарядки енергії. Принцип дії цифрового гідравлічного виконавчого механізму додатково пояснюється нижче у цьому описі. Цифрові гідравлічні виконавчі механізми, підключені один до одного, можуть використовуватися як перетворювачі тиску, за допомогою яких передача енергії між різними зарядними колами можлива без значного споживання енергії. Зазначені цифрові блоки перетворювачів тиску (ЦБПТ) можуть також використовуватися, коли виконавчий механізм при безперервній роботі підключається до зарядного кола. У блоці перетворювача тиску передача енергії основується на використанні робочих поверхонь виконавчих механізмів і на способі регулювання без дроселювання. При підключенні блока перетворювача тиску до зовнішнього джерела енергії, що рухає рухому частину блока перетворювача тиску, зазначений цифровий перетворювач тиску помповий агрегат (ЦПТПА) може використовуватися для подачі енергії в зарядні кола, коли кінетична енергія перетворюється за допомогою зазначених виконавчих механізмів в гідравлічну енергію, тобто, в тиск і об'ємну витрату середовища під тиском. Термін "цифровий виконавчий механізм" відноситься, зокрема, до циліндра, що має робочі поверхні, кодовані двійковим або іншим шляхом, які з'єднуються із зарядними колами за допомогою різних комбінації з'єднання, і керуванню без дроселювання. Типово, йдеться про керування силою або регулювання сили. Цифровий гідравлічний поворотний привід містить один або кілька виконавчих механізмів, які мають одну або кілька камер й основані на керуванні без дроселювання. Ці виконавчі механізми разом з однією або кількома зубчастими рейками і зубчастими колесами, зв'язаними 2 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 з одним або кількома виконавчими механізмами, перетворюють лінійне переміщення в обмежений поворот. Типово, йдеться про регулювання моментом або регулювання моменту. Цифровий гідравлічний обертовий привід містить два або більше кілька виконавчих механізмів, які мають одну або кілька камер й основані на керуванні без дроселювання і механічно зв'язані з ексцентриком. Це типово є регулювання моментом або регулювання моменту, що досягається через регулювання зусилля виконавчих механізмів. Система дозволяє підключати два або більше зарядних кіл, які мають різні тиску, через керуючі інтерфейси до одного або кількох цифрових гідравлічних виконавчих механізмів. Блок виконавчого механізму, утворений одним або кількома виконавчими механізмами, використовується, таким чином, як виконавчий механізм для переміщення навантаження, блок перетворювача тиску, помповий блок перетворювача тиску, помпа або як одночасно сполучення будь-яких із зазначених пристроїв. Виконавчі механізми і блоки виконавчих механізмів можуть підключатися до навантаження й один до одного фізично або гідравлічно залежно від конкретного застосування. Технічними перевагами і відмінами системи у порівнянні до відомих рішень є безумовно вища ефективність використання енергії (вищий енергетичний ККД), керованість, простота компонентів і конструкції, модульність і відвертання відмов. у відомих рішеннях із реостатним регулюванням регулювання зусиллям виконавчого механізму досягається шляхом плавного регулювання тисків робочих камер. Таким чином, тиски керуються шляхом дроселювання потоків середовища під тиском, що входить до робочої камери і виходить з неї. На відміну від цього пропонована система передбачає альтернативний шлях регулювання виконавчим механізмом, здійснюваного із значно меншою кількістю дроселів і з простими клапанами і простою структурою системи й основаного на регулюванні зусилля, шляхом використання лише даних дискретних, заздалегідь визначених, але регульованих рівнів тиску (наприклад, зарядні кола ВТ і НТ). Регулювання зусиллям досягається шляхом плавного регулювання зусилля шляхом використання зарядних кіл з рівномірно ступенево змінними рівнями тиску і робочих поверхонь виконавчих механізмів, підключених до них. Представлений спосіб регулювання у сполученні з виконавчим механізмом або блоком виконавчих механізмів, які мають робочі поверхні, кодовані, наприклад, двійковим або іншим шляхом, уможливлює значно менше споживання енергії у порівнянні до відомих способів регулювання. Крім того, система уможливлює високі максимальні швидкості і є дуже точною при регулюванні і позиціюванні. При звичайному пропорційному дросельному регулюванні швидкість механізму, підключеного до виконавчого механізму, регулюється у спосіб, прямо пропорційний площі поперечного перерізу отвору дроселюючого регулюючого елемента, причому похибки у регулюванні регулюючого елемента відбиваються безпосередньо на швидкості механізму, яка має регулюватися. У відомих рішеннях важливим фактором, що визначає й обмежує точність регулювання, є оптимізація регулюючого елемента відповідно до конкретного застосування. При цифровому дросельному регулюванні неточності в регулюванні швидкості виконавчого механізму можна зменшити через використання кількох двохпозиційних клапанів, підключених паралельно як регулюючий елемент, причому при даній різниці тисків певні контрольні показники (так звана уставка або контрольне значення) двохпозиційних клапанів досягаються при використанні певних дискретних значень швидкості, які з високою ймовірністю є близькими до прогнозованих значень. Таким чином, характеристика чутливості за положенням одержує певні кутові коефіцієнти, коли швидкість одержує певні дискретні значення. Похибка у досягнутій швидкості і грубість кутастості характеристики чутливості за положенням залежатиме від роздільної здатності регулювання швидкості, тобто, від кількості наявних отворів і, відтак, клапанів. У представленій цифровій системі, основаній на регулюванні без дроселювання і маючій регулювання прискорення, прискорення механізму, підключеного до виконавчого механізму, регулюється пропорційно створенню зусилля виконавчого механізму, яке у свою чергу регулюється шляхом підключення кожного зарядного кола і, таким чином, ще й кожного наявного рівня тиску до наявних робочих поверхонь таким чином, що потрібне створення зусилля здійснюється найкращим чином. Регулювання швидкості досягається за допомогою зворотного зв'язку за швидкістю, і характеристика чутливості за швидкістю одержує певні кутові коефіцієнти, коли прискорення одержує певні дискретні значення. Грубість кутастості характеристики чутливості за швидкістю залежатиме від роздільної здатності регулювання прискорення. Таким чином, характеристика чутливості за положенням буде математично на одну ступінь більш регульованою при порівнянні з регулюванням швидкості дроселюванням. 3 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 У представленій системі може досягатися теоретично будь-яке значення швидкості, при цьому похибка швидкості залишається дуже малою. Чинниками, що обмежують роздільну здатність регулювання швидкості, є, таким чином, роздільна здатність регулювання прискорення, період дискретизації системи регулювання, час спрацьовування керуючих інтерфейсів, час, що забирається на зміни стану робочих камер, і точність вимірювання датчиків. Роздільна здатність регулювання прискорення залежатиме від кількості наявних робочих камер і кодування їх площ, а також від кількості зарядних кіл, що мають бути підключеними до робочої камери і мають різні рівні тиску, а також від рівнів тиску зарядних кіл і співвідношень між рівнями тиску зарядних кіл і різниць рівнів тиску зарядних кіл. З іншого боку, у представленому способі цифрового гідравлічного регулювання не виникне будь-яка неточність у дроселюванні регулюючого елемента, викликана, наприклад, зміною зусилля або тиску навантаження, і будь-яка похибка регулювання, спричинена цим. У цьому відношенні має за усіх обставин високу керованість у порівнянні до відомих систем, що регулюються дроселюванням. Якщо система містить кілька окремих виконавчих механізмів, які мають дію на той самий предмет або на ту саму точку дії або різні точки дії у тому самому предметі, чи то з одного напрямку, чи то з різних напрямків, зусилля, створюване кожним виконавчим механізмом, може регулюватися або окремо, незалежно один від одного, або з впливом один на одного, щоб одержати потрібний напрямок або величину сумарної сили, тобто, результуючої сили, створеної виконавчими механізмами. Зазначена сумарна сила діє на предмет, діючий як навантаження, і спричиняє прискорення, уповільнення або урівноваження сили навантаження. Для того щоб зробити зазначену сумарну силу маючою потрібні величину і напрямок, система регулювання повинна бути здатною регулювати силу виконавчих механізмів на підставі змінної або змінних, виміряних із системи або визначених іншим чином. Використання системи можуть варіюватися майже без меж, але типові випадки застосування цифрових гідравлічних виконавчих механізмів включають різноманітні випадки повороту, обертання, піднімання, опускання, передача привідного зусилля і компенсація переміщення, така, як, наприклад, компенсація хвилювання моря. Система найбільше придатна для використань, в яких є відносно значні інерційні маси, які потрібно прискорювати або уповільнювати відносно створенню сили виконавчого механізму, де можна добитися значної економії енергії. Крім того, система дуже придатна для використань, в яких є кілька виконавчих механізмів, що мають регулюватися, які діють одночасно із змінними рівнями навантаження. Крім того, використання цієї системи можуть включати випадки застосування, в яких виконавчий механізм використовується для створення утримувальну силу таким чином, що виконавчий механізм або видає зовнішні задавальні діяння, або - альтернативно - чинить опір їм, тобто, намагається створити протидіючу силу відповідної величини і таким чином утримувати рухомий предмет нерухомим. Кількість виконавчих механізмів для використання у тій самій системі може коливатися, як і кількість виконавчих механізмів для підключення до однієї частини того самого предмету або механізму. Зокрема, кількість виконавчих механізмів, підключених до того самого предмета або його частини (наприклад, до рами машини) до того самого предмета або його частини (наприклад, до стріли підйомного крана), є важливою з огляду на властивості регулювання, споживання енергії і оптимальне відвертання відмов блоку виконавчих механізмів, утвореного між зазначеними предметами. Стислий опис графічного матеріалу Далі винахід описується докладніше на кількох прикладах і з посиланнями на додані креслення. На фіг. 1 показана система відповідно до одного прикладу здійснення винаходу, в якій використовується виконавчий механізм, що представляє собою циліндр, що містить чотири робочі камери і приводиться середовищем під тиском. Фіг. 2 представляє собою таблицю станів, призначену для використання для регулювання системи, показаній на фіг. 1. На фіг. 3 показані ступені сил, створюваних системою, показаною на фіг. 1. На фіг. 4 показана функціональність коефіцієнтів регулювання системи регулювання. На фіг. 5 показаний a пристрій регулювання для використання при регулюванні системи. На фіг. 6 показаний альтернативний пристрій регулювання для використання при регулюванні системи. На фіг. 7 показаний ще один альтернативний пристрій регулювання для використання при регулюванні системи. На фіг. 8 показана робота регулюючого перетворювача для використання при регулюванні системи. 4 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 60 На фіг. 9 показаний поворотний пристрій відповідно до одного прикладу здійснення винаходу. На фіг. 10 показана ексцентрикова помпа-мотор відповідно до одного прикладу здійснення винаходу. На фіг. 11 показана система відповідно до ще одного прикладу здійснення винаходу. Фіг. 12 ілюструє принцип дії помпового перетворювач тиску. На фіг. 13a-13d показані виконавчі механізми для використання у системі на фіг. 11. На фіг. 14 показаний помповий перетворювач тиску відповідно до одного прикладу, який містить чотири камери. На фіг. 15 показаний перетворювач тиску відповідно до одного прикладу, який містить чотири камери. На фіг. 16 показаний перетворювач тиску відповідно до одного прикладу, який містить чотири камери і регулюється схемами регулювання. На фіг. 17 показаний помповий перетворювач тиску відповідно до одного прикладу, який містить вісім камер і регулюється за допомогою перехресного підключення. На фіг. 18 показаний помповий перетворювач тиску відповідно до одного прикладу, який містить вісім камер і регулюється схемою регулювання. ДОКЛАДНІШИЙ ОПИС ВИНАХОДУ Керуючий інтерфейс Вхід і повернення середовища під тиском до виконавчого механізму і з нього керуються за допомогою керуючих інтерфейсів. Виконавчий механізм містить одну або кілька робочих камер, що діють за принципом витіснення. Кожен керуючий інтерфейс має один або кілька клапанів регулювання, підключених паралельно. Клапанами регулювання переважно є швидкодіючі відсічні клапани із суттєво низькими втратами тиску, наприклад, двохпозиційні клапани з електричним керуванням, і якщо ці клапани включені паралельно у тій самій лінії, разом вони визначатимуть об'ємну витрату у лінії. Залежно від керування, кожна робоча камера виконавчого механізму відключається від зарядного кола або підключається через керуючі інтерфейси до зарядного кола, наприклад, зарядного кола ВТ або зарядного кола НТ у системі з подвійним тиском. Такий спосіб керування, в якому керуючі інтерфейси, що ведуть до робочої камери виконавчого механізму і містять один або кілька клапанів, завжди або повністю відкриті, або закриті, називається у цьому описі способом регулювання без дроселювання. Керуючі інтерфейси діють таким чином, що клапан або усі паралельні клапани керуючого інтерфейсу керуються так, щоб бути або відкритими, або закритими. Керування керуючого інтерфейсу може, таким чином, бути двійковим, при якому настройка є або одиниця (керуючий інтерфейс відкритий, включений) або нуль (керуючий інтерфейс закритий, виключений). На основі цієї настройки може створюватися необхідний електричний сигнал керування. Цифровий гідравлічний виконавчий механізм Робота системи регулювання цифрового виконавчого механізму потребує, щоб система містила принаймні один виконавчий механізм принаймні з однією робочою камерою. Складова сили, створювана робочою камерою, основується на робочій поверхні робочої камери і на тиску, якій діє у робочій камері. Величина сумарної сили, створюваної виконавчим механізмом, представляє собою розрахований добуток зазначених чинників. У цьому варіанті здійснення сила навантаження переважно регулюється виконавчим механізмом, тобто, сила, що діє на виконавчий механізм, є більшою за величиною, ніж складова протидіючої сили, створюваної тиском зарядного кола НТ у виконавчому механізмі, і меншою за величиною, ніж складова протидіючої сили, створюваної тиском зарядного кола ВТ у виконавчому механізмі, щоб досягти регулювання сили принаймні з двома рівнями для регулювання навантаження. В одному варіанті система містить принаймні один виконавчий механізм принаймні з двома робочими камерами, робочі поверхні яких відрізняються, завдяки чому досягається регулювання сили принаймні з 4 рівнями у системі подвійного тиску. Складові сил, створювані різними робочими камерами, діють в одному або різних напрямках, залежно від системи і поведінки навантаження, що регулюється. Кожна робоча камера здатна створювати дві нерівні складові сили. В системі з двома рівнями тиску відношення площ робочих поверхонь переважно складає 1:2, щоб досягти регулювання сили з рівномірними ступінчастими рівнями. Відповідна система досягається двома однокамерними виконавчими механізмами, які задовольняють, наприклад, відношенню 1:2 площ робочих поверхонь. Більше рівнів сили досягаються, наприклад, при збільшенні кількості робочих камер у тому самому виконавчому механізмі або при доданні окремих виконавчих механізмів і підключення їх до того самого навантаження. Більше рівнів сили досягаються також при збільшенні кількості зарядних кіл з різними рівнями тиску, підключених до виконавчого механізму. У цьому випадку число складових сили і 5 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 60 одночасно рівнів сили, створюваних виконавчим механізмом, є показниковою функцією, у якої основа - це кількість зарядних кіл з різними рівнями тиску, підключених до виконавчого механізму, а показник - кількість робочих камер у виконавчому механізмі. Переважно, робочі поверхні робочих камер відрізняються, і так само відрізняються рівні тиску зарядних кіл, підключених до виконавчого механізму. Переважно також, якщо відношення між площами робочих поверхонь робочих камер N описується рядом M , де основа M - кількість зарядних кіл, що підключаються до виконавчого механізму, а показник N - група натуральних чисел (0, 1, 2, 3, …n), якщо також рівні тиску зарядних кіл, що можуть підключатися до них, є рівномірно ступенево змінними, щоб досягти рівномірно ступенево змінного регулювання сили, коли робочі поверхні підключені до зарядного кола ВТ або зарядного кола НТ, або до інших зарядних кіл при використання різноманітних з'єднувальних комбінацій. Особливо у системі, що містить два зарядних кола (зарядне коло ВТ і зарядне коло НТ), N відношення між площами робочих поверхонь робочих камер переважно описується рядом M , де основа M = 2, а показник степеня N - група натуральних чисел (0, 1, 2, 3, …n); тобто, ряд 1, 2, 4, 8, 16 і т.д., утворений ваговими коефіцієнтами бітів у двійковій системі, щоб досягти рівномірно ступенево змінного регулювання сили, коли робочі поверхні підключені до зарядного кола ВТ або зарядного кола НТ при використання різноманітних з'єднувальних комбінацій. Термін "рівномірно ступенево змінне" означає, що ступінь з одного рівня сили на наступний або з одного рівня тиску на наступний має постійну величину. Рівні сили утворюються як різноманітні сполучення кількох складових сили, створюваних у виконавчому механізмі, утворюючі сумарну силу. Відношення площ робочих поверхонь також може слідувати іншому ряду 1, 1, 3, 6, 12, 24 і т.д. або ряду відповідно до методів кодування Фібоначчі або PNM. При збільшенні рівних площ або, наприклад, площ, що відрізняються від двійкового ряду, можна одержати більше рівнів сили, але при цьому одержуються й неробочі стани, які не збільшують нові рівні сили, але та сама сумарна сила виконавчого механізму досягається двома або більше з'єднувальними комбінаціями керуючих інтерфейсів. Число з'єднувальних комбінацій утворюється як показникова функція, в якій основа - це число різних рівнів тиску, що підключаються до робочих камер, а показник степеня - загальне число робочих камер. Система містить принаймні один виконавчий механізм, який діє на навантаження. Якщо у системі з подвійним тиском використовуються два виконавчі механізми з 8 4 камерами, число станів і з'єднувальних комбінацій системи збільшується до 2 = 256, оскільки загальна кількість робочих камер складає 8. Якщо два або більше ідентичних виконавчих механізмів з'єднуються, щоб діяти на ту саму точку дії у навантаженні, стани системи є здебільшого неробочими відносно один одного. Зазначені виконавчі механізми діють на навантаження з одного напрямку або з протилежних напрямків, і відповідні робочі камери цих ідентичних виконавчих механізмів однакові за розміром. Якщо різні виконавчі механізми діють на ту саму точку дії з різних напрямків, то можна потрібним чином регулювати величину і напрямок сумарної сили, яка діє на навантаження. Якщо різні виконавчі механізми підключені до різних точок дії у навантаженні, величину і напрямок сумарної сили, яка діє на навантаження, а також величину і напрямок моменту можна регулювати, як потрібно. Один конкретний компактний варіант здійснення винаходу, який має достатньо багато рівнів для регулювання, і який може використовуватися універсальним чином, містить виконавчий механізм з чотирма робочими камерами, причому відношення площ їх робочих поверхонь слідує двійковому ряду 1, 2, 4 і 8, і при цьому досягається 16-рівневе регулювання сили, яке є рівномірно ступенево змінним. Крім того, виконавчий механізм конструктивно виконаний таким чином, що складові сили, створені їх робочими камерами, які мають одна найбільшу робочу поверхню, а друга найменшу робочу поверхню, діють в одному напрямку. Складові сили, створені іншими робочими камерами, є протилежними за напрямком. У цьому контексті регулювання сили, або регулювання моменту, або регулювання прискорення відноситься до регулювання сили, або моменту, або прискорення, оскільки із певними з'єднувальними комбінаціями керуючих інтерфейсів система завжди створює дану силу або даний момент, досягнення яких не потребує зворотного зв'язку. При використанні виконавчого механізму, створення сили яким можна вибирати поступово, легко реалізувати поступове регулювання прискорення, при якому прискорення прямо пропорційно так званій діючий силі, утвореній як сума сумарної сили, створеної виконавчим механізмом, й інших складових або, що діють на навантаження. При регулюванні прискорення системі знадобляться для зворотного зв'язку величини сили навантаження, що навантажує систему, і інерційної маси навантаження, щоб дійти висновку щодо створеної сумарної сили, при якій досягається потрібне прискорення навантаження. Однак найпростішим шляхом представлена система може 6 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 60 застосовуватися у таких випадках застосування, в яких інерційна маса навантаження залишається приблизно постійною, і при цьому єдиними даними, що залишаються для зворотного зв'язку, є сила навантаження, що навантажує систему. Систему з регульованим прискоренням можна розширити до системи з регульованою швидкістю за допомогою зворотного зв'язку за швидкістю. Систему з регульованою швидкістю можна далі розширити до системи регульованим положенням за допомогою зворотного зв'язку за положенням. Вимога до відтворюваності, що має бути досягнута при даному директивному значенні, що випадково вибирається для прискорення, кутового прискорення, швидкості, кутової швидкості, положення або обертання, полягає у тому, що при значенні нуль (0) для відносного регулювання системи прискорення виконавчого механізму має дорівнювати приблизно нулю. Однак прискорення рухомої частини виконавчого механізму з регульованою силою з дискретним постійним контрольним значенням у значній мірі залежить від сили навантаження, що навантажує виконавчий механізм. Тому до контрольного значення необхідно додати член для компенсації сили навантаження, і цей член у цьому документі називається нульовою точкою прискорення регулювання. При цьому контрольному значенні прискорення виконавчого механізму й одночасно навантаження підтримується якомога ближче до нуля. Створення компенсуючого члена здійснюється або емпірично, або через оцінку дії сили навантаження, або табуляцією, або шляхом застосування інтегруючого регулювання або оцінкою по даним датчиків. Оскільки система здатна видавати в керуючі інтерфейси лише дискретні контрольні значення, не обов'язково можна підтримувати навантаження, яке має регулюватися системою, повністю нерухомим будь-яким даним дискретним регулюванням, але для цього стан регулювання системи повинен повторно змінюватися між двома різними станами, які створюють протилежні прискорення. Ці зміни стану, що відбуваються у виконавчому механізмі, не є повністю без втрат, але енергія витрачається серед іншого через стисливість середовища під тиском, коли рівень тиску у будь-якій робочій камері піднімається. Отже, переважно утримувати навантаження і відповідний механізм на місці, усі керуючі інтерфейси виключені, так що механізм є замкнений нерухомим у так званому стані замикання. Є практично доцільним реалізувати цю функцію таким чином, що пріоритет регулювання стана замикання є вищий за пріоритет регулювання керуючих інтерфейсів, і що зазначені регулювання не впливають одне на одне. Коли стан замикання включений, усі керуючі інтерфейси виключені незалежно від того, яка була б з'єднувальна комбінація керуючих інтерфейсів у випадку, якби стан замикання не був включений. За винятком стану замикання, стани рівнів тиску робочих камер можна представити нулем (0), який вказує на нижчий тиск (наприклад, підключення до зарядного коло ВТ), й одиницею (1), яка вказує на вищий тиск (наприклад, підключення до зарядного коло НТ). Таким чином стани робочих камер можна однозначно виразити одним двійковим числом у будь-який момент часу, якщо на додаток робочі камери завжди іменуються у заданому порядку. Двійкове число складається з чотирьох цифр, якщо є 4 робочі камери. У цьому описі цифрове регулювання означає спосіб регулювання, у якому використовуються два або більше рівнів тиску, і виконавчий механізм або блок виконавчих механізмів, що використовують їх, мають обмежене число дискретних рівнів сили, яке основується на кількості робочих камер і особливо комбінацій різних рівнів тиску, підключених до різних робочих камер. Оскільки дроселювання об'ємних витрат є украй несуттєвим, система уможливлює високі максимальні швидкості, якщо хід поршню виконавчого механізму є довгим. Високі швидкості поршня виконавчого механізму потребують великих об'ємних витрат в робочі камери виконавчого механізму або з них, відповідно до принципу витіснення. З цієї причини регулюючі клапани повинні у разі потреби пропускати ці великі об'ємні витрати, щоб середовище під тиском можна було вводити в розширювальну робочу камеру із необхідною швидкістю з потрібного зарядного кола без виникнення збурної кавітації. Виконавчий механізм, оснащений робочими поверхнями, основаними на двійковому ряді, може застосовуватися при використанні так званого регулювання без дроселювання у випадках застосування, в яких інерційна маса навантаження, приведена до виконавчого механізму, велика. Таким чином, великі кількості кінетичної енергії зв'язані з навантаженням під час прискорень і потенційною енергією при переміщеннях при підніманні, причому ця енергія може при уповільненні або опусканні навантаження повертатися до будь-яких зарядних кіл і використовуватися знов. Завдяки способу регулювання без дроселювання і використанню робочих поверхонь це є можливим і може також реалізовуватися незалежно від величини сили статичного навантаження, доки значення сили статичного навантаження знаходиться у межах 7 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 60 діапазону сили, створюваної виконавчим механізмом. Під діапазоном створюваної сили мається на увазі приблизно діапазон створюваної сили, що залишається між максимальним і мінімальним значеннями дискретних сил, які можуть досягатися кожного разу. Найбільші вигоди системи одержуються при великих переміщеннях, які зв'язують і вивільняють сили, наприклад, у поворотних приводах, в яких для прискорення великої маси потрібна велика сила або великий момент, але в яких під час усталеного руху потрібна дуже мала сила або момент, а на стадії гальмування потрібна велика гальмівна сила або великий гальмівний момент. Перевага у цьому випадку полягає у тому, що під час усталеного руху система використовує дуже мало енергії, і компенсувати треба лише втрати на тертя і в'язкість. Регулювання здійснюється шляхом вибору підходящих площ робочих поверхонь і тиску, що діє на них, з кола ВТ або з кола НТ для використання. Відтак, для кожної ситуації регулювання вибирається, таким чином, підходящий рівень сили. Крім того, система економить енергію таким самим чином у таких випадках застосування, наприклад, при піднятті або у привідних трансмісіях (наприклад, при їзді на підйом або вниз), в яких для того, щоб створити нульове прискорення навантаження, необхідні сила або момент, що чітко відрізняються від нуля, так звані утримувальна сила або утримувальний момент. Таким чином, під час усталеного руху в одному напрямку енергія зв'язується з навантаженням або механізмом, зв'язаним з ним, направленням середовища під тиском із зарядного кола вищого рівня тиску у виконавчий механізм або блок виконавчих механізмів. Одночасно енергія передається в зарядне коло нижчого рівня тиску, до якого підключена стискувальна робоча камера виконавчого механізму. При русі у протилежному напрямку енергія повертається з навантаження або механізму в систему, коли середовище під тиском повертається з виконавчого механізму в зарядне коло. Таким чином, під час усталеного руху робочі поверхні виконавчого механізму можуть вибиратися так, що сумарна сила, створювана виконавчим механізмом, є близькою до необхідної утримувальної сили або утримувального моменту, але таким чином, що підведення енергії в систему покриває втрати через тертя і в'язкість. У порівнянні до відомих систем представлена система економить енергію й у випадках застосування з втратами, які можуть включати, наприклад, переміщення з великим тертям, такі, як штовхання або тягнення предмета на поверхнях з тертям. У цьому випадку для використання кожним виконавчим механізмом в різних ситуаціях переважно вибираються таке регулювання і така відповідна робоча поверхня, що долають силу або момент тертя, що чинить опір руху і створюють потрібну кінетичну швидкість. Таким чином, кожний виконавчий механізм завжди оптимально підібраний за розміром відносно тисків зарядних кіл, що використовуються, причому кожний виконавчий механізм витрачає якомога мало енергії. Через втрати на тертя і в'язкість і втрати при змінах стану керуючих інтерфейсів вся енергія, підведена в систему, не може повернутися у зарядне коло. Спосіб регулювання системи автоматично здійснює збирання якомога більше енергії кожного разу, коли кінетична або потенційна енергія вивільняється з навантаження або механічної системи, пов'язаної з ним, наприклад, під час стадій гальмування й (або) опускання інерційної маси. Таким чином, ті робочі поверхні і робочі камери, що раніше створювали складові сили, що прискорювали й (або) піднімали інертну масу, тепер сприяють збиранню енергії. Зазначені робочі камери підключені за допомогою керуючого інтерфейсу до зарядного кола, в яке енергія має бути повернена або передана. Зарядна система З точки зору роботи й економії енергії системи суттєвим моментом є те, що усі зарядні кола, підключені до цифрового гідравлічного виконавчого механізму, здатні подавати і приймати об'ємну витрату без радикальної зміни рівнів тиску зарядних кіл. За допомогою зарядної системи енергію між зазначеними пристроями для зарядки енергії можна передавати будь коли у разі потреби. Якщо робочий цикл системи є енергозв'язувальним (підняття навантаження, наприклад, маси, на вищий рівень), в систему вводиться потрібна енергія, наприклад, шляхом закачування середовища під тиском, наприклад, з кола НТ в коло ВТ за допомогою помпового агрегату; якщо робочий цикл є енергозвільнювальним (опускання навантаження, наприклад, маси, на нижчий рівень), зазначена енергія може перетворюватися у гідравлічну енергію і використовуватися відповідно до потреби або зберігатися у пристрої для зарядки енергії. Якщо зберігання неможливе, гідравлічна енергія перетворюється зворотно, наприклад, в кінетичну енергію, шляхом обертання електричного двигуна або електричного генератора таким чином, що середовище під тиском направляється з кола ВТ в коло НТ. Це перетворювання здійснюється, наприклад, за допомогою зазначеного зарядного пристрою або іншого відповідного перетворювача енергії. Робочий цикл будь-якого виконавчого механізму тієї самої системи може містити як енергозв'язувальну (наприклад, прискорення маси, підняття 8 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 60 навантаження), так і енергозвільнювальну (наприклад, гальмування маси, опускання навантаження) робочі стадії. Якщо система містить кілька виконавчих механізмів, різні виконавчі механізми можуть одночасно мати як енергозв'язувальну, так і енергозвільнювальну робочі стадії. Чутлива до навантаження система представляє собою найтиповіше рішення системи відповідно до рівня техніки, яка є системою, незалежною від тиску навантаження, і керованою об'ємною витратою, і вона уможливлює втрату тиску, яка складається не лише з тиску навантаження, а ще й втрату тиску у трубопровідній системі і настройку різниці (перепаду) тиску при дросельному регулюванні об'ємної витрати середовища під тиском (типово приблизно 1420 бар). У приводах, підключених паралельно, робочий тиск системи регулюється; в системі, що діє нормально з кількома паралельними приводам одночасно, відповідно до найвищого рівня тиску навантаження і відповідно до виконавчого механізму, різниця (перепад) тиску на дроселі регулювання об'ємної витрати підтримується постійною за допомогою компенсаторів тиску, і енергія, таким чином, марнується у вигляді втрат в них. Оскільки цифрова гідравлічна система, основана на способі регулювання без дроселювання, містить кілька виконавчих механізмів, робочі цикли яких можна розмістити у часі майже будь-яким чином відносно один одного, система безумовно є енергетично ефективнішою за відому чутливу до навантаження систему. У цифровій гідравлічній системі у кожному виконавчому механізмі можна для використання вибирати підходящу робоча поверхня залежно від наявного рівня тиску і потреби у створенні сили, щоб досягти необхідного створення сили і кінетичної швидкості з мінімальною витратою енергії. Крім того, цифрова гідравлічна система не чутлива до перешкод (завад), спричинених коливаннями тиску у колах подачі тиску (зарядні кола), оскільки система адаптується до них через використання робочих поверхонь. Як у відомих системах, так й у представленій системі новітнього типу рівні тиску зарядних кіл можуть помітно змінюватися, коли потреба виконавчих механізмів в енергії перевищує здатність створювати енергію зарядного пристрою. У представленій цифровій гідравлічній системі тиски зарядних кіл можуть в певних межах вільно варіюватися, і при цьому урегульованість ще й досі залишається високою, і коливання тиску не справляють значного впливу на витрату енергії. Переважно, тиски зарядних кіл вимірюються безперервно, щоб знати сполучення робочих камер виконавчого механізму для досягнення потрібної сумарної сили. Таким чином, кількість витраченої енергії також точно відповідає потребі. У представленій системі коливання тисків зарядних кіл спричиняють проблеми лише у тому випадку, якщо ці зміни є настільки великими, що сила статичного навантаження вже не є у межах діапазону створення сили виконавчого механізму. Приклад I цифрової гідравлічної системи На фіг. 1 показаний приклад системи, яка представляє собою цифрову гідравлічну систему, основану на способі регулювання без дроселювання і складається з чотирьохкамерного виконавчого механізму у вигляді циліндра, приводи мого середовищем під тиском, зарядних кіл, пристроїв для зарядки енергії і регулюючі клапани керуючих інтерфейсів. Система містить у якості зарядних кіл одну лінію ВТ (лінію високого тиску, лінію P) 3 і одну лінію НТ (лінію низького тиску, лінію T) 4, лінію 5, підключену до камери A виконавчого механізму, a лінія 6 підключена до камери B виконавчого механізму, лінію 7, підключену до камери C виконавчого механізму, і лінію 8, підключену до камери D виконавчого механізму. Гідравлічна енергія в зарядні кола 3 і 4 подається, наприклад, зарядним пристроєм, робота якого докладніше описується нижче. Крім того, система містить керуючі інтерфейси, призначені для керування підключенням кожної камери до лінії ВТ і лінії НТ; інакше кажучи, керуючий інтерфейс 9 (що керує підключенням HP/P-A), керуючий інтерфейс 10 (A-LP/T), керуючий інтерфейс 11 (HP/P-B), керуючий інтерфейс 14 (C-LP/T), керуючий інтерфейс 15 (HP/P-D) і керуючий інтерфейс 16 (DLP/T). Крім того, система містить акумулятор ВТ 17, підключений до лінії ВТ 3, і акумулятор НТ 18, підключений до лінії НТ 4. У цьому прикладі система містить компактний виконавчий механізм 23 з чотирма робочими камерами, з який дві робочі камери (A, C) працюють в одному напрямку, розширюючи циліндр, використовуваний як виконавчий механізм 23, а дві робочі камери (B, D) працюють у протилежному напрямку, стискаючи циліндр. Виконавчий механізм 23 має A-камеру 19, B-камеру 20, C-камеру 21 і D-камеру 22. Виконавчий механізм 23, у свою чергу, діє на предмет, який виступає як навантаження L. Лінія ВТ відгалужується у кожну лінію 5, 6, 7 і 8 в робочі камери виконавчого механізму через керуючі інтерфейси високого тиску 9, 11, 13 і 15 відповідно. Лінія НТ відгалужується у кожну лінію 5, 6, 7 і 8 в робочі камери виконавчого механізму через керуючі інтерфейси низького тиску 9 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 10, 12, 14, і 16 відповідно. Лінії 5, 6, 7 і 8 безпосередньо підключені до робочих камер 19, 20, 21 і 22 відповідно. У разі потреби в лінію до кожної робочої камери може включатися регулюючий клапан тиску. Зазначені лінії й керуючі інтерфейси утворюють коло керування 40, необхідне для керування виконавчим механізмом 23. Крім того, у системі на фіг. 1, використовуваній як приклад, виконавчий механізм 23 конструктивно виконаний, щодо площ робочих камер, таким чином, що значення площ, пропорційні найменшій площі, слідують ваговим коефіцієнтам двійкової системи (1, 2, 4, 8, 16 і т.д.), так що виконавчий механізм 23 називається також маючим двійкове кодування. Двійкове кодування площ є, у зв'язку з регулюванням сили, реалізованим цифровим регулюванням, найпереважнішим шляхом кодування площ, щоб одержати при мінімальній кількості робочих камер максимальну кількість різних рівнів сили, щоб сили були рівномірно ступенево змінними. Виконавчий механізм має чотири робочі камери, і кожна робоча камера може використовуватися у двох різних станах, які можуть називатися станом високого тиску і станом низького тиску (відповідно до двох різних складових сили), причому до кожної робочої камери підключається лише ліні ВТ 3 або лінія НТ 4. На фіг. 1 проілюстровані складові сили FA, FB, Fc, FD, створені робочими камерами. Стани можуть також вказуватися нулем (0, стан низького тиску) й одиницею (1, стан високого тиску). У n цьому випадку кількість комбінації станів стає 2 , де n - кількість робочих камер, і в зазначеному прикладі досягаються 16 різних комбінацій станів робочих камер, і, таким чином, виконавчий механізм може створювати 16 різних сумарних сил, причому завдяки двійковому кодуванню величини цих сил є рівномірно ступенево змінними від найменшої до найбільшої. Неробочих станів немає, оскільки завдяки двійковому кодуванню кожен рівень сили може створюватися лише однією комбінацією станів. Крім того, немає складових сили з рівними абсолютними значеннями, оскільки усі робочі камери відрізняються одна від одної. У цьому прикладі напрямки дії різних складових сили є частково протилежними, і їх сумарна сила визначає силу, створювану виконавчим механізмом, і її напрямок дії, разом із рівнями тиску кіл НТ і ВТ. Отже, регулюванням рівнів тиску НТ і ВТ виконавчий механізм може використовуватися для створення сумарних сил або лише в одному напрямку, або у двох протилежних напрямках. Це залежатиме від конкретного випадку застосування, від того, в якому напрямку сумарні сили бажано або потрібно використовувати. В інших прикладах варіанті здійснення до кожної робочої камери можуть підключатися й інші зарядні кола, наприклад, кілька ліній ВТ або ліній НТ або ті й інші. Пристрій регулювання, що входить до складу системи на фіг. 1, регулює роботу виконавчого механізму і може бути частиною більшої системи регулювання, що регулює систему на фіг. 1, для забезпечення потрібної послідовності роботи, пов'язаної зі створенням потрібної сили, моменту, прискорення, кутового прискорення, швидкості, кутової швидкості, положення або обертання. Якщо система міститиме кілька виконавчих механізмів, вона міститиме й відповідні пристрої регулювання для них. Директивне значення може даватися автоматично або вручну, наприклад, за допомогою джойстика. Система регулювання типово містить програмований процесор, який виконує потрібні алгоритми й одержує необхідні дані вимірювань з датчиків для регулювання виконавчих механізмів. Система регулювання керує, наприклад, пристроями регулювання відповідно до функціональності, яка вимагається від системи. Різні з'єднувальні комбінації, з якими виконавчий механізм створює різні сумарні сили, клапанів, за допомогою яких реалізовані керуючі інтерфейси 9-16, розміщені у так званому керуючому векторі у пристрої регулювання, і при цьому сумарні сили, створювані при різних станах клапанів, є у порядку зростання, наприклад, як показано на фіг. 2. Це можливо - у випадку циліндра 23 з площами з двійковим кодуванням - при використанні збільшеного 4бітового двійкового числа при виборі станів робочих камер, причому також біти, що вказують стан робочих камер 20 і 22, діючий в негативному напрямку (циліндр стає коротшим), перетворюються на їх комплементи. У двійковому числі, що використовується для вибору станів робочих камер і для регулювання виконавчого механізму, значимість кожного біта пропорційна площам робочих поверхонь робочих камер. Таким чином сумарна сила, створювана виконавчим механізмом, може регулюватися пропорційно індексації керуючій комбінації, вибраної з керуючого вектора, в зазначеному керуючому векторі. Термін "керуюча комбінація" означає комбінацію органів керування керуючих інтерфейсів. На фіг. 2 показаний приклад таблиці станів циліндрового виконавчого механізму з чотирма камерами, що відповідає системі на фіг. 1. Робочі поверхні робочих камер закодовані двійковими ваговими коефіцієнтами: A:B:C:D = 8:4:2:1. З таблиці станів можна бачити, як робочі поверхні під різними тисками змінюються з постійними інтервалами при переході з одного стану 10 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 60 в наступний. З цієї причини силовий відклик, видаваний виконавчим механізмом, також є рівномірно ступенево змінним. У стовпчику "u%" дається індекс для різних органів керування як десяткове число. У стовпчику "dec 0…15" дається десяткове число, що відповідає двійковому числу, утвореному з двійкових станів (ВТ, НТ) робочих камер У стовпчиках A, B, C і D двійкові стани камер виражені таким чином, що біт стану 1 представляє високий тиск (ВТ), а біт стану 0 представляє низький тиск (НТ). У стовпчиках "a/HP" і "a/LP" робочі поверхні, підключені до тисків ВТ і НТ виконавчого механізму, вказані у відносних числах, приймаючи, що зазначені відношення площ дотримуються. У стовпчику "dec 0…255" дається десяткове число, яке відповідає двійковому числу, утвореному з двійкових станів керуючого інтерфейсу. Стовпчики A-LP, HP-A, B-LP, HP-B, C-LP, HP-C, D-LP і HP-D містять двійкові стани керуючих інтерфейсів, що відповідають кожному органу керування (1, відкритий, і 0, закритий). Очевидно, що при збільшенні числа станів робочих камер, коли число зарядних кіл збільшується, стани можуть представлятися, наприклад, трісковою системою (цифри 0, 1, 2), четвірковою системою (цифри 0, 1, 2, 3) або іншим чином. Фіг. 3 ілюструє графіки сили для випадку, представленого у таблиці станів на фіг. 2, і для чотирьохкамерного циліндрового виконавчого механізму з ідеально двійково кодованими площами відповідно, наприклад, до фіг. 1. У цьому докладнішому прикладі діаметр поршня циліндра дорівнює 85 мм, тиск кола ВТ 14 МПа, і тиск кола НТ 1 МПа. Верхній графік показує (у порядку зростання) сумарні сили, створені виконавчим механізмом, які досягаються при різних з'єднувальних комбінаціях робочих камер підключенням робочих камер до кіл ВТ і НТ відповідно до таблиці станів на фіг. 2. На нижньому графіку верхня крива ілюструє створення сили виконавчим механізмом представленням ступенево змінних сумарних сил як безперервної функції. Нижня крива ілюструє створення діючою сили пропорційно прискоренню поршня або штока поршня виконавчого механізму, яке можна розрахувати доданням дії сили зовнішнього навантаження, яка у цьому випадку є стисною або такою, що чинить опір розтягуванню (видовженню) виконавчого механізму, до сумарної сили, створеної виконавчим механізмом. Сила навантаження залежатиме від конкретного випадку застосування і від навантаження, викликаного предметом, що регулюється. У цьому прикладі стискна зовнішня сила приймається від'ємною; іншими словами, вона опускає криву діючої сили вниз, а зовнішня тягова сила, у свою чергу, піднімає криву діючої сили вверх й у цьому прикладі сприяє розтягуванню (видовженню) виконавчого механізму. Із цих графіків можна одержати приблизне значення для тих контрольних значень або контрольних значень, при яких виміряні діюча сила або прискорення дорівнюють нулю. Точка нульової сили відноситься до приблизного значення для директивного значення, при якому діюча сила, створена виконавчим механізмом, дорівнює нулю. Точка нульового прискорення відноситься до контрольного значення, при якому прискорення рухомою частини виконавчого механізму дорівнює нулю. У випадку циліндрового виконавчого механізму рухомою частиною є його поршень і шток поршня, причому його корпус є нерухомим, якщо навантаження приєднане до штока поршня. З іншого боку, рухомою частиною може бути корпус, який рухається відносно поршня і штока поршня, якщо навантаження приєднане до корпуса. У випадку двійкового виконавчого механізму крива на фіг. 3 є безперервною функцією, яка представляє собою багаточлен першого порядку, тобто, пряму лінію. Приклад II цифрової гідравлічної системи На фіг. 11 показаний приклад системи, яка також представляє собою цифрову гідравлічну систему, основану на способі регулювання без дроселювання. Інші примірні системи містять один або кілька виконавчих механізмів фіг. 11. На фіг. 11 нумерація компонентів відповідає нумерації на фіг. 1 у тій мірі, у якій є відповідний компонент. Таким чином, система є такою, що використовує цифрові гідравлічні виконавчі механізми, основані на способі регулювання без дроселювання. Система містить принаймні один виконавчий механізм 23 і два або більше зарядних кіл 3, 4 і 121, з яких гідравлічна енергія може подаватися до робочих камер виконавчих механізмів 23. Виконавчий механізм 23 разом із колом керування 40 (ПЦРП) може також використовуватися як частина пристрою для зарядки енергії; прикладом є зарядка потенційної енергії в пружину 113 або в навантаження L. Навантаження L може також відноситися до навантаження, що регулюється, наприклад, за допомогою регулювання сили. До кожного виконавчого механізму підключені одне або кілька зарядних кіл, використовуваних як частина пристрою для зарядки енергії. До кожного виконавчого механізму, що регулює інше навантаження, підключені два або більше зарядних кіл. Зарядне коло підключене до виконавчого механізму за допомогою кола керування 40, що містить принаймні необхідні 11 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 60 керуючі інтерфейси (див. фіг. 1), і за допомогою якого кожна робоча камера може підключатися до зарядного кола, і типово зазначене з'єднання може бути також закритим. Переважно, будьяка робоча камера виконавчого механізму може бути як закритою, так і підключеною до будьякого зарядного кола, що належить системі. Кожен керуючий інтерфейс реалізований, наприклад, з одним або кількома двохпозиційними клапанами. Ці клапани розміщені, наприклад, у клапанному блоку, що містить необхідні лінії. Кожне коло керування 40 разом із відповідним пристроєм регулювання утворює пристрій цифрового регулювання прискорення (ПЦРП). Докладніший спосіб роботи й алгоритм регулювання пристрою регулювання залежатиме від конкретного застосування виконавчого механізму. На цих фігурах зарядні кола, що мають підключатися до зазначеного пристрою, вказані позиціями HPi, MPi і LPi (відповідно для високого, середнього і низького тисків), де i ціле число. Стрілка, включена в символ виконавчого механізму, представляє регульованість, основану на використанні різних рівнів тиску і робочих поверхонь. Один приклад реалізації пристрою регулювання показаний на фіг. 5. Як показано на фіг. 11, система містить принаймні один зарядний пристрій 110, який видає необхідну гідравлічну енергію в зарядні кола 3, 4, підключені до нього. До кожного зарядного кола може підключатися один або кілька зарядних пристроїв, або - альтернативно - жоден зарядний пристрій не підключається до зарядного пристрою, якщо це є зарядний пристрій (наприклад, зарядні пристрої 116 і 117, вказані позиціями HPia, HPia і LPia, де i - ціле число), в який гідравлічна енергія подається непрямо через інше зарядне коло або іншим шляхом (наприклад, перетворювач тиску 112 на фіг. 11 або помповий перетворювач тиску 122 на фіг. 12). Зарядний пристрій 110 містить один або кілька помпових агрегатів 111, наприклад, з гідравлічним помповим агрегатом 112, який містить звичайну гідравлічну помпу і її привід. Якщо помповий агрегат містить кілька гідравлічних помп, підключених паралельно, або принаймні одну помпу, що містить ці нерівні ємності, які можуть регулюватися незалежно одна від одної, гідравлічна енергія може передаватися між зарядними колами кількох різних рівнів тиску одночасно. Крім того, зарядний пристрій 110 містить систему 124 керуючих клапанів і клапанів безпеки, за допомогою якої кожна лінія помпового агрегату, у цьому прикладі лінії 119 і 118 помпового агрегату, може підключатися до будь-якого зарядного кола незалежно одна від одної, або до лінії бака і бака T, якщо він включений до системи. За допомогою системи 124 керуючих клапанів і клапанів безпеки забезпечується, що рівень тиску у зарядних колах або у лініях помпових агрегатів не піднімається занадто високо. Якщо система містить зарядні кола, які підключені до одногозарядного пристрою, енергія може передаватися між зазначеними зарядними колами за допомогою, наприклад, перетворювача тиску. Як приклад, згадуються зарядні кола HPi і HPia на фіг. 11, в яких передача енергії можлива з двох або більше зарядних кіл через перетворювач тиску в два або більше зарядних кіл одночасно. До кожного зарядного кола можуть підключатися один або кілька пристроїв для зарядки енергії. Пристрій для зарядки енергії представляє собою, наприклад, звичайний акумулятор тиску 17 і 18 або цифровий циліндровий виконавчий механізм 23, що заряджає енергію, наприклад, на навантаження L або на пружину 113, у вигляді потенційної енергії. Енергія може заряджатися як потенційна енергія і в стисливий газ або у будь-якій іншій формі енергії. Тиск зарядних кіл підтримується на потрібному рівні за допомогою пристроїв для зарядки енергії і зарядних пристроїв. До кожного зарядного кола, як показано на фіг. 13c і 13d, можуть підключатися як цифрові гідравлічні виконавчі механізми, основані на способі регулювання без дроселювання, так і відомі виконавчі механізми, що регулюються дроселюванням клапанів регулювання. Крім того, до кожного зарядного кола можуть підключатися одне або кілька підкіл за допомогою цифрових гідравлічних виконавчих механізмів, які застосовуються як перетворювачі тиску або помпові перетворювачі тиску. Підколо - це зарядне коло, безперебійна робота якого залежить від енергії, що вноситься з іншого зарядного кола. В інших відношеннях, до підкіл застосовуються ті самі принципи, що й до інших зарядних кіл. Зарядний пристрій Далі розглянемо роботу зарядного пристрою 110. Гідравлічний помповий агрегат 120 містить одну або кілька гідравлічних помп або помп-моторів, які можуть бути або звичайного типу, або помпами-моторами, що містять одну всмоктувальну лінію й одну напірну лінію, або цифрових гідравлічних помп або помп-моторів, що містять кілька ліній, які можуть використовуватися як всмоктувальні й напірні лінії залежно від регулювання. У цьому прикладі лінія 119 є всмоктувальною лінією звичайної гідравлічної помпи, що приймає об'ємну витрату, а 12 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 60 лінія 118 є, у свою чергу, напірною лінією, що доставляє об'ємну витрату. Функцією системи 124 регулюючих і запобіжних клапанів є підключення лінії 119 до зарядного кола, з якого має поставлятися середовище під тиском, і підключення лінії 118 до зарядного кола, в яке мають подаватися середовище під тиском і гідравлічна енергія. Помповий алгоритм зарядного пристрою 110, якій реалізується його пристроєм керування, типово працює за принципом, що лінія 118 завжди підключена до такого зарядного кола, в якому відносне відхилення тиску від мінімального значення вікна цільового тиску, або цільового тиску, є найбільшим. Відповідним чином, лінія 119 завжди підключена до такого зарядного кола, в якому відносне переповнення тиску від максимального значення вікна цільового тиску, або цільового тиску, є найвищим. Якщо тиск будь-яких зарядних кіл не перевищує максимального значення цільового тиску відповідного вікна цільового тиску, лінія 119 підключається до лінії бака (бака T), і, відповідним чином, лінія 118 підключається до такого зарядного кола, в якому відносне відхилення тиску від мінімального значення вікна цільового тиску, або цільового тиску, є найбільшим. Якщо тиски усіх зарядних кіл перевищують максимальне значення або цільовий тиск відповідного вікна цільового тиску, лінія 118 підключається до лінії бака (бака T), і, відповідним чином, лінія 119 підключається до такого зарядного кола, в якому відносне переповнення тиску від максимального значення вікна цільового тиску, або цільового тиску, є найвищим. У цьому випадку енергія передається з зарядного кола за допомогою помпового агрегату 111 у вигляді, наприклад, кінетичної енергії, або використовується, наприклад, для виробництва електричної енергії за допомогою генератора й акумуляторів. Щоб запобігти вібраціям помпового агрегату 111, з'єднання міняються через достатньо тривалі інтервали, наприклад, через періоду з'єднання принаймні 1 секунда. Якщо тиск лише одного зарядного кола відрізняється від його цільового тиску або вікна цільового тиску, лінія 118 може триматися підключеною, доки не буде досягнутий цільовий тиск. Якщо тиски усіх зарядних кіл залишаються нижче мінімальних значень відповідних вікон цільового тиску, ці тиски коригуються альтернативним чином за допомогою зазначеного алгоритму і шляхом підтримування співвідношень між тисками такими самими, як співвідношення між відповідними цільовими тисками. Таким чином, експлуатаційні характеристики виконавчих механізмів залишаються на високому рівні, навіть якщо зарядні кола ще й досі перебували на стадії зарядки, і цільові тиски ще не були досягнуті. Якщо тиски відхиляються в різні боки від відповідних цільових тисків, середовище під тиском видаляється із зарядного кола, в якому відносне переповнення цільового тиску рівня тиску є найвищим, і середовище під тиском подається в зарядне коло, в якому відносна нестача рівня тиску від цільового тиску є найвищою. В ситуаціях, в яких будь-який виконавчий механізм негайно потребує великої кількості енергії для переміщення навантаження, зарядці даного зарядного кола може віддаватися пріоритет на даний момент або постійно над зарядкою інших кіл, або дане зарядне коло може підключатися для використання зазначеним виконавчим механізмом. Пристрій керування конфігурований таким чином, щоб здійснювати зазначені операції у зарядному пристрої 110, керуючи його компонентами за допомогою відповідних керуючих сигналів і на основі результатів вимірювань, які включають, зокрема, вимірювання тиску різних контурів тиску. Зарядні кола і лінії зарядного пристрою переважно оснащені датчиками тиску, підключеними до пристрою керування. Пристрій регулювання цифрового гідравлічного виконавчого механізму Далі розглянемо пристрій регулювання, використовуваний для регулювання системи, який розраховує за допомогою директивного значення необхідні контрольні значення для регулювання навантаження за допомогою виконавчого механізму. Контрольними значеннями у цьому випадку є значення, що описують стани керуючий інтерфейсів і стани їх регулюючих клапанів. Є кілька можливих альтернатив пристрою регулювання, з яких у цьому документі будуть представлені деякі підходящі. Спільною ознакою різних пристроїв регулювання є те, що пристрій регулювання розраховує оптимальні стани для керуючих інтерфейсів, тобто, положення регулюючих клапанів (відкрите або закрите). Цей розрахунок відбувається на основі даних директивних значень і виміряних змінних. Цифрові вихідні дані пристрою регулювання використовуються для установки положень регулюючих клапанів. n Число комбінацій вихідних даних дорівнює 2 , де n - число вихідних даних, якщо стани керуючих інтерфейсів також описуються двійковими альтернативами 0 і 1. Із цих комбінацій використовуються лише деякі, оскільки ситуація, в якій як коло ВТ, так і коло НТ одночасно підключені до тієї самої робочої камери, не дозволяється. Описана ситуація означала б, наприклад, що як керуючий інтерфейс 11 (HP-B), так і керуючий інтерфейс 12 (B-LP) були б відкриті, що призвело б до потоку короткого замикання з кола ВТ в коло НТ і відхиленню тиску 13 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 60 робочої камери 20 від тиску як кола НТ, так і кола ВТ. Крім того, потік короткого замикання спричинив би втрати енергії, яких треба запобігти. Представлений спосіб регулювання суттєво відрізняється від пропорційного регулювання, при якому кінетичний стан системи плавно регулюється одним регулюючим клапаном. Робота пристрою регулювання 24 ілюструється на фігурі на рівні схематичного креслення, яке прийнятне й для моделювання системи. На основі принципів, представлених на схематичному кресленні, фахівець у цій галузі у змозі розробити й впровадити потрібний пристрій регулювання (алгоритм регулювання/програмне забезпечення регулювання), що підключається до системи, яка регулює навантаження. Типово це процесор, придатний для обробки сигналів і керований програмним забезпеченням, який реалізує певні обчислювальні алгоритми. Пристрій регулювання містить входи і виходи для одержання і видачі сигналів. Пристрій регулювання утворює частину пристрою цифрового регулювання прискорення (ПЦРП) (на фігурі - DACU). При розгляді коефіцієнтів регулювання у цьому документі, посилання робиться на засіб 25, показаний на фіг. 4 і відомий як такий, що масштабує вхідну змінну In1 таким чином, що вихідна змінна Out1 стає сумою членів P (підсилення), I (інтегрування) і D (диференціювання), масштабованих з деякими коефіцієнтами регулювання. Вхід типово є залишком, розрахованим за сукупністю або директивним значенням на основі виміряного значення. Точніші числові значення для ефективного будуть знайдені емпірично або обчислюваннями у зв'язку з настроюванням пристрою регулювання. На фіг. 5 показаний пристрій регулювання 24 для чотирьохкамерного виконавчого механізму, показаного на фіг. 1. Відповідний пристрій регулювання може застосовуватися і в інших виконавчих механізмах або блоках виконавчих механізмів, що мають відповідне кодування площ робочих камер. Принципи пристрою регулювання 24 можуть поширюватися й на інші, ніж чотирьохкамерні або з двійковим кодуванням виконавчі механізми. Систему з регульованою силою можна перетворити на систему з регульованим прискоренням при використанні зворотного зв'язку для даних про прискорення, а також даних про силу, створювану виконавчим механізмом, до пристрою регулювання. На основі цього можна розрахувати компенсаційний член, який дає нульове прискорення для регулювання, причому потрібне прискорення може створюватися виконавчому механізму незалежно від сили навантаження. Систему з регульованим прискоренням можна перетворити на систему з регульованою швидкістю шляхом надання пристрою регулювання директивного значення швидкості і порівняння його з даними про швидкість, виміряними з виконавчого механізму (зворотний зв'язок за швидкістю). Таким чином, сила, створена виконавчим механізмом, порівнюється пропорційно зі змінною різниці швидкості, тобто, різницею між директивним значенням швидкості і фактичним значенням, або даними про швидкість. Змінна різниці масштабується елементом, показаним на фіг. 4. Систему з регульованою швидкістю можна перетворити на систему з регульованим положенням шляхом надання пристрою регулювання директивного значення положення і порівняння його з даними про положення, виміряними з виконавчого механізму. Таким чином, директивне значення швидкості виконавчого механізму, щоб бути вхідними даними в систему регулювання швидкості, коригується пропорційно зі змінною різниці положення, тобто, різницею між директивним значенням і фактичним значенням положення. Система регулювання положення, реалізована таким чином, основана на регулюванні сили виконавчого механізму, є одним прикладом так званої вторинної системи регулювання. Пристрій регулювання 24 на фіг. 5, регулюючи положення виконавчого механізму, здійснює вторинне регулювання і перетворює розраховане контрольне значення в комбінацію станів керуючих інтерфейсів. Пристрій регулювання одержує на своїх входах директивне значення 26 для положення виконавчого механізму і дані про положення 27 і розраховує їх різницю, яка є змінною різниці положення. Змінна різниці положення масштабується у блоку регулювання положення 61 (коефіцієнти регулювання положення) для утворення директивного значення швидкості 28 елементом 25, показаним на фіг. 4. Дані про швидкість 29 віднімаються з директивного значення швидкості 28, і таким чином одержується змінна різниці швидкості. Змінна різниці швидкості масштабується у блоку регулювання швидкості 38 (коефіцієнти регулювання швидкості) елементом 25, показаним на фіг. 4 для утворення значення регулювання сили 31, яке насичується, наприклад, в діапазон від -1 до +1 і вводиться в регулюючий перетворювач 32. Контрольне значення, масштабоване таким чином, може легко масштабуватися далі для утворення контрольних значень керуючого інтерфейсу. Якщо член І у коефіцієнтах блока регулювання швидкості 30 дорівнює нулю, тобто, інтегрувальний орган 14 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 60 регулювання не використовується, контрольне значення 31 є пропорційним потрібному прискоренню, причому контрольне значення 31 може також зватися контрольним значенням відносного прискорення. Якщо інтегрувальний орган регулювання використовується, контрольне значення 31 апроксимує змінну, пропорційну потрібному створенню сили, причому після цього член для компенсації сили навантаження до регулювання вже не додається. Функція регулюючого перетворювача 32 полягає, головним чином, в перетворенні контрольного значення 31 в двійкові органи регулювання керуючих інтерфейсів. Якщо інтегрувальний орган регулювання не використовується, регулюючий перетворювач потребуватиме також для цієї функції інформації про силу навантаження, яка діє на виконавчий механізм, і додасть член, пропорційний навантаженню, в орган регулювання, щоб задовольнити потрібне прискорення. Крім того, регулюючий перетворювач 32 аналізує дані, одержані як дані датчиків в реальному мірилі часу про змінну різниці положення 33, дані про швидкість 29 і змінну різниці швидкості 34, і на підставі цих даних робить висновок, наприклад, чи має бути система замкнена у положенні шляхом закриття усіх керуючих інтерфейсів. Якщо, наприклад, дане директивне значення для положення 26 або нульова швидкість досягнуті з достатньою точністю, продовжувати регулювання далі вже не варто, оскільки при зміні станів клапанів витрачається енергія. Регулюючий перетворювач 32 потребуватиме також директивне значення 35 про тип стану замикання, що має використовуватися. Альтернативами можуть бути, наприклад, 1) відсутність замикання у будь-якій ситуації, 2) замикання вручну увесь час (у типі переходу на ручне керування, тобто, "силою"), 3) замикання при використанні з огляду на потреби регулювання положення, 4) замикання при використанні з огляду на потреби регулювання швидкості. Функції, виконувані регулюючим перетворювачем 32, можуть також бути поділеними кільком окремим перетворювачам, наприклад, таким чином, що кожен перетворювач керує керуючими інтерфейсами одного виконавчого механізму. Контрольне значення 31 для прискорення, тобто, контрольне значення для відносної сили, можна вводити як вхідні дані в усі перетворювачі, які розраховують положення, що відповідають потрібному прискорення відповідно до ситуації з навантаженням. Альтернативно, функції, виконувані регулюючим перетворювачем, можуть бути поділеними модульним частинам на основний рівень пристрою регулювання. Таким чином, можна оброблювати органи регулювання кількох виконавчих механізмів у тих самих частинах регулюючого перетворювача таким чином, що спільні операції здійснюються для векторнозначного регулювання, масштабованими на основі деяких змінних, одержаних із системи навіть до вводу в частини регулюючого перетворювача. Крім того, альтернативно, можна створювати органи регулювання кількох виконавчих механізмів у тому самому регулюючому перетворювачі з однієї спільної системи дискретного регулювання, використовуючи різноманітні керуючі вектори, тобто, таблиці перетворення регулювання. Блок затримки 36 є необов'язковим, але може використовуватися для виконання оптимізації, яка відіб'ється на функціональних можливостях клапанів керуючого інтерфейсу. Наприклад, функцією блока затримки 36 може бути додання затримки змінам контрольних значень 37 клапанів на висхідних краях органів цифрового регулювання й, у разі потреби, керування відкриттям керуючого інтерфейсу, коли це необхідно з огляду на витрату енергії. Необхідні затримки розраховуються на підставі, наприклад, даних про швидкість 29 виконавчого механізму. Далі розглянемо пристрій регулювання системи з регульованою швидкістю. Як показано на фіг. 6, система з регульованою швидкістю потребує для своєї роботи директивного значення швидкості 28 виконавчого механізму і даних про швидкість 29, які можуть одержуватися, наприклад, як безпосередньо виміряні дані з датчика швидкості або як розрахункові дані по іншим виміряним змінним, особливо по зміні положення зі зміною часу, тобто, шляхом диференціювання по даним положення. В системі регулювання швидкості контур регулювання положення випущений. Щодо інших частин, система з регульованою швидкістю працює таким самим чином, як і система з регульованим положенням на фіг. 5. Далі розглянемо пристрій регулювання системи з регульованим прискоренням. Система з регульованим прискоренням також може потребувати даних про швидкість 29 виконавчого механізму як даних датчика зворотного зв'язку. Однак це використовується не для регулювання, а, наприклад, для потреб запірної системи у регулюючому перетворювачі 32, як показано на фіг. 5. Крім того, запірна система потребуватиме даних про змінну різниці швидкості або стан контрольного значення 31, тобто, наскільки контрольне значення відрізняється від нуля. Щодо інших частин, система з регульованою силою працює таким самим чином, як і система з регульованим положенням на фіг. 5. 15 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 60 Крім того, в системах з регульованими швидкістю і прискоренням в блоку затримки 36 на фіг. 5 використовується інтелектуальне додання затримок відкриття керуючих інтерфейсів. Робота регулюючого перетворювача пристрою регулювання ілюструється на рівні схематичного креслення на фіг. 8, і посилання одночасно здійснюються на таблицю станів на фіг. 2, яка використовується в перетворювачі. На підставі даного контрольного значення 31 регулюючий перетворювач 32 розраховує двійкові стани 38, що підходять для керуючих інтерфейсів. Контрольне значення 31 піддається необхідним масштабуванням, перетворенням рівнів, операціям з заокруглення до цілого числа, оскільки йдеться про дискретні рівні сили. Якщо у пристрої регулювання інтегрувальне регулювання (блоки 61 і 30) не застосовується, оцінка 38 для нульової точки прискорення або змінної, пропорційної їй, також додається до контрольного значення 31 у регулюючому перетворювачі 32. Контрольне значення відносної сили 31 виконавчого механізму повинне масштабуватися до діапазону показників степеня для регулювання таблиці станів виконавчого механізму (фіг. 2, u%) таким чином, що в усіх ситуаціях навантаження контрольне значення нуль (0) створюватиме контрольне значення нульової точки прискорення на вхід блока насичення. Це реалізується у цьому прикладі шляхом множення контрольного значення відносної сили на величину діапазону показників степеня для органів регулювання, після чого оцінка 38 для нульової точки прискорення додається до сигналу. Результат насичується в діапазон показників степеня від 0 до 15 і заокруглюється до найближчого цілого, причому дискретне контрольне значення u% вже утворене. Після цього здійснюється АЦП (аналого-цифрове перетворення) таким чином, що з таблиці знаходиться десяткове число, що відповідає утвореному двійковому числу двійкових станів керуючих інтерфейсів (0…255) при дискретному контрольному значенню u%, що відповідає йому. Десяткове число, взяте з таблиці, перетворюється на двійкове число, і біти зазначеного двійкового числа відділяються від їх власних вихідних даних відповідно до таблиці станів. Таким чином, для кожного клапана утворені двійкові органи керування 39 (відкритий, закритий). У ситуації замикання орган керування кожного керуючого інтерфейсу встановлений в стан, що відповідає закриттю. Керування витратою енергії у виконавчому механізмі і її оптимізація Далі розглянемо зміни станів робочих камер у системі. Коли тиск робочої камери підвищується від тиску НТ до тиску ВТ, середовище під тиском у робочій камері також стискається, і структури системи у деякій мірі піддаються, і при цьому енергія мусить подаватися з кола ВТ в робочу камеру, якщо не здійснюється попереднє стиснення за допомогою власної кінетичної енергії системи. Коли тиск знижується назад до тиску НТ, зазначена енергія, ув'язана у стиснуте середовище під тиском, марнується, якщо цю енергію не треба або не можна ув'язати у кінетичну енергію для використання у системі за допомогою розширення середовища під тиском (попереднє розширення). Чим більша робоча камера, в якій відбуваються зміни тиску, тим більший об'єм середовища під тиском, і тим більша кількість енергії, спожитої або звільненої при змінах стану. Природно, безпосередній вплив на споживання енергії справлятиме також число змін стану. При аналізі таблиці станів на фіг. 2, можна побачити, що коли різні контрольні значення u% змінюються, відбуваються зміни конкретних станів різного числа робочих камер. При контрольних значеннях u% = 4 і u% = 5 змінюється стан лише найменшої робочої камери (камери D), на той час як при контрольних значеннях u% = 7 і u% = 8 змінюються стани усіх робочих камер. Як результат, зміна стану між u% = 4 і u5 = % споживає в багато разів менше енергії, ніж зміна стану між контрольними значеннями u% = 7 і u% = 8. З огляду на споживання енергії, переважно здійснювати зміну станів керуючого інтерфейсу, підключеного до кола НТ, і керуючого інтерфейсу, підключеного до кола ВТ тієї самої робочої камери, завжди одночасно, оскільки у цьому випадку один з керуючих інтерфейсів починає зариватися у той самий час, коли інший керуючий інтерфейс починає відкриватися. Таким чином, наприклад, коли елементи, що закривають, регулюючих клапанів переміщаються одночасно, обидва з керуючих інтерфейсів є наполовину відкритими і, таким чином, миттєво пропускають значну кількість об'ємної витрати (так звана витрата короткого замикання), яка споживає енергію. У цьому описі це явище називається вибуховою зміною стану через втрату енергії короткої тривалості. Втрати енергії можна зменшити підвищенням робочих швидкостей регулюючих клапанів і зважуванням на них у регулюванні системи. Коли робоча камера стискається, і її тиск треба підняти від тиску НТ до тиску ВТ, переважно - з точки зору споживання енергії - встановити затримку відкриття для керуючого інтерфейсу, підключеного до кола ВТ. Таким чином, коли керуючий інтерфейс, підключений до кола НТ, 16 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 60 закритий, робоча камера упродовж певного часу закрита. Коли робоча камера стискається далі, тиск у робочій камері підвищується (попереднє стискання), і керуючий інтерфейс, підключений до кола ВТ, може відкриватися без непотрібної втрати енергії в момент, коли тиск у робочій камері підвищується до рівня тиску ВТ. Відповідної вигоди можна досягти, коли робоча камера розширюється, і її тиск повинен бути зміненим з тиску ВТ на тиск НТ. Таким чином, для керуючого інтерфейсу, підключеного до кола НТ, встановлюється затримка відкриття; інакше кажучи, зміна стану робочої камери здійснюється закриттям робочої камера на мить і очікуванням, поки робоча камера розширяється зі зниженням тиску в робочій камері до рівня тиску НТ (попереднє розширення). Таким чином, керуючий інтерфейс, підключений до кола НТ, може відкриватися без втрат енергії. При інших змінах стану запобігти втраті енергії важко, і при них затримка відкриття не використовується. Затримки відкриття регулюються у пристрої регулювання 24 на фіг. 5 і, наприклад, в його блоку затримки 36, про що йшлося вище. В одному прикладі для того щоб мінімізувати втрати енергії при змінах стану робочих камер, можна використовувати у зв'язку зі зміною стану рівень тиску, встановлений між тисками кіл ВТ і НТ, приблизно посередині між ними. Як показано на фіг. 11, це є зарядне коло 121, інакше кажучи, коло середнього тиску (СТ). Переважно, до кола СТ підключений принаймні один пристрій для зарядки енергії, наприклад, акумулятор тиску. У системі, що містить три або більше рівнів тиску, можна здійснювати майже безвтратну зміну стану між двома рівнями тиску робочої камери, використовуючи рівень тиску, залишений між ними. Далі ми розглянемо зміну стану робочої камери одного цифрового гідравлічного виконавчого механізму. На початку зміну стану робоча камера перебуває під низьким тиском. На початку до робочої камери підключене коло середнього тиску, і при цьому тиск у робочій камері починає підвищуватися. Коли рівень тиску є достатньо близьким до тиску ВТ або інакше досягає свого максимуму, до робочої камери підключається коло ВТ, причому перехідний тиск залишається коротким, і будь-яке переповнення тиску вряд чи відбувається. На будь-якій стадії немає потреби дроселювати потоки середовища під тиском, що уможливлює майже безвтратну зміну стану. Енергія, потрібна для зміни стану, спочатку ув'язується з робочої камери або зарядного кола за допомогою індуктивності розсіювання трубопроводу в кінетичну енергію зарядного кола і тим самим далі в енергію тиску робочої камери. Зміна стану з тиску ВТ на тиск НТ робочої камери також реалізується відповідним чином. Спочатку до робочої камери підключене коло середнього тиску, і коли нестача тиску є найвищою, робоча камера підключається до тиску НТ. При змінах стану енергія зв'язується і звільнюється, як вже описувалося. Регулювання й оптимізація рівнів тиску зарядних кіл Далі розглянемо вплив тисків ВТ і НТ на градацію і рівень сили і, тим самим, урегульованість сумарних сил, створюваних виконавчим механізмом. Якщо тиск НТ дуже низький, то при підвищенні тиску ВТ збільшуються як максимальна штовхаюча сила (додатна сумарна сила), так і максимальна тягова сила (від'ємна сумарна сила). Таким чином, протяжність діапазону сили збільшується, і при цьому збільшується і різниця між рівнями сили, оскільки число рівнів сили залишається незмінним. У випадках застосування, в яких величина і напрямок потрібної сумарної сили варіюється у значній мірі, доцільно використовувати дуже високе відношення між тисками ВТ і НТ. Після того як тиск ВТ заданий до даного рівня, і тиск НТ підвищується, додатна сумарна сила, яка має бути досягнута при найвищому дискретному регулюванні, зменшується, а від'ємна сумарна сила, яка має бути досягнута при найнижчому дискретному регулюванні, зміщується у додатному напрямку, при цьому діапазон сили виконавчого механізму стає вужчим. Коли тиск НТ підвищується у достатній мірі, сумарна сила, яка має бути досягнута при найнижчому дискретному регулюванні, зміщується з від'ємного боку в додатний і тим самим наближується далі до додатної сумарної сили, яка має бути досягнута при максимальному дискретному регулюванні. Коли діапазон сили стає вужчим, вужчою стає і різниця між рівнями сили, і при цьому зміни прискорення виконавчого механізму одночасно зменшуються. Це покращить регульованість, якщо випадок застосування є таким, що сила навантаження не змінюється у значній мірі; тобто, вона завжди залишається в межах певних значень допусків. Таким чином, у певних випадках застосування доцільно, якщо тиски НТ і ВТ активно регулюються у разі потреби так, що діапазон сили охоплює створення сили, необхідної для оптимального переміщення навантаження. Представлений вище спосіб зменшує споживання енергії, оскільки меншими є втрати енергії при вибухових змінах стану, тиски ВТ і НТ є ближчими одне до одного. Крім того, різниці рівнів сили є, таким чином, меншими, регулювання є точнішим, оптимізація легшою, і ефективність використання енергії вищою. 17 UA 103207 C2 5 10 15 20 25 Якщо система не містить альтернативних пристроїв зберігання для середовища під тиском, кількість середовища під тиском, що містить в акумуляторах тиску, обмежує максимальний тиск кола ВТ. З іншого боку, мінімальний тиск кола НТ визначається пропускною здатністю регулюючих клапанів, яка є пропорційною різниці тисків, разом із вимогами до швидкості виконавчого механізму, причому тиски ВТ і НТ не можуть регулюватися ніяким чином незалежно один від одного. Регулювання тисків ВТ і НТ незалежно один від одного потребуватиме альтернативного пристрою зберігання для середовища під тиском у системі. Пристроєм зберігання може бути, наприклад, акумулятор тиску або бак середовища під тиском. Оптимізація пристрою регулювання Далі розглянемо знаходження члена для компенсації сили навантаження. При регулюванні положення, швидкості, а також прискорення, для того, щоб зважити на силу навантаження, можна використовувати, наприклад, інтегрувальне регулювання, яке можливе лише на основі виміряних даних про положення 27 і даних про швидкість 29, що виміряні або інтегровані з даних про положення. Альтернативно, можна, однак, також застосовувати знаходження так званої нульової точки прискорення таким чином, що на основі даних про прискорення, одержаних з датчика прискорення, встановленого на рухомій частині системи, і даних, одержаних про створення сили виконавчого механізму, член для компенсації сили навантаження, тобто, оцінка нульової точки прискорення 38, додається до контрольного значення 31. Дані про створення сили виконавчого механізму мовна розрахувати або безпосередньо з дискретного регулювання виконавчого механізму, або на основі виміряних тисків робочих камер, або на основі даних, одержаних безпосередньо з датчика сили. При використанні системи, показаній на фіг. 1, оцінка основується на рівнянні сили стану безперервності системи, в якому прискорення дорівнює нулю: F m a, де a = 0, і F Fcy l Fload 0, де сили, що діють у напрямку, що збільшує довжину виконавчого механізму поршнем виконавчого механізму, є додатними, а сили, що діють у напрямку, що зменшує довжину виконавчого механізму, є від'ємними. Fcy l Fload , 30 35 40 45 50 2 D1 pHP pLP u% 10pLP 5pHP . 36 Оскільки тепер припускається, що прискорення дорівнює нулю, контрольне значення u% виконавчого механізму, що заокруглене до цілого числа, тобто, маюче дискретне значення, має бути таким, що коли діє сила статичного або динамічного навантаження, абсолютне значення реалізованого прискорення у кожний момент часу є якомога близьким до нуля. Контрольне значення виконавчого механізму має обмежене число дискретних станів, причому нульове прискорення часто не досягається у будь-якому з зазначених станів, але між дискретних значень має бути уявленим теоретичне контрольне значення з безперервним значенням, щоб бути в змозі обчислити точне значення для потрібно контрольного значення. Це теоретичне контрольне значення з безперервним значенням, що дає нульове прискорення, у цьому документі називається нульовою точкою прискорення uа0. Зазначене контрольне значення підставляється замість дискретного контрольного значення виконавчого механізму у формулі: Fcy l 2 D1 pHP pLP ua0 t 10pLP 5pHP Fload t 36 Якщо дані датчика в реальному мірилі часу або дані оцінки сили навантаження, низького тиску (рLP) і високого тиску (рHP), зазначений член uа0 може бути знайдений з формули сили у реальному мірилу часу: 36 5pHP 10pLP Fload 2 D1 ua0 . pHP pLP Член ua0 представляє такий еквівалент ступенево змінного контрольного значення u%, маючий безперервне значення або не заокруглений, який найкращим чином дає приблизне нульове прискорення при доданні до контрольного значення, масштабованого до діапазону індексації нульового значення контрольних значень виконавчого механізму перед операцією заокруглення. Таким чином, дискретне контрольне значення u% виконавчого механізму зміщується точно на необхідне зміщення, при цьому відбувається необхідний ефект конденсації. 18 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 60 У вищенаведених формулах член D1 - діаметр робочої камери 19 (найбільша камера А), pHР - тиск кола ВТ, pLP i - тиск кола НТ, і Fload - величини сили навантаження, приведеної до виконавчого механізму. У цьому прикладі член ua0 змінюється між 0 і 15. Лівий бік формули сили представляє силу Fcyl, створювану виконавчим механізмом. Від вибраного кроку контрольного значення uao (див. фіг. 2) залежить також сила, створювана системою, яка повинна дорівнювати силі навантаження при нульовій точці прискорення. Результуюча сила, що діє на систему, розраховується множенням одержаного прискорення, наприклад, в вигляді даних датчика, на інерційну масу, приведену до виконавчого механізму. Припущену силу Fcyl, створювану виконавчим механізмом, можна розрахувати безпосередньо на основі дискретного контрольного значення виконавчого механізму, але надійніший результат для створення сили в усіх випадках одержується розрахунком сили на основі виміряних тисків і робочих поверхонь робочих камер, або безпосередньо як результат вимірювання з датчика сили. Сила навантаження Fload тепер одержується як різниця між зазначеною результуючою силою і силою, створюваною виконавчим механізмом. Значення сили навантаження, одержане як результат розрахунку, можна тепер підставити, разом із тисками ВТ і НТ, у формулу для нульової точки прискорення, і формула дає як результат значення нульової точки прискорення. Альтернативно, силу навантаження Fload можна також підставити в таблицю, що відповідає графіку сили виконавчого механізму і що зберігається в регулюючому перетворювачі 32 таким самим чином, як таблиця станів на фіг. 2. За силою навантаження у цій таблиці знаходиться й контрольне значення, потрібне для створення протидіючої сили, що дорівнює силі навантаження. Спосіб, оснований на табулюванні, є функціональним, особливо якщо розміри робочих поверхонь відхиляються, наприклад, від двійкового ряду таким чином, що рівні сили є нерівномірно ступенево змінними. Розраховане або табульоване контрольне значення (оцінка 38) додається до контрольного значення 31 виконавчого механізму, наприклад, в регулюючому перетворювачі 32, після чого регулюючий перетворювач розраховує контрольні значення 39 керуючих інтерфейсів. Компенсація сили навантаження відбувається, наприклад, в окремому керуючому блоку або блоку компенсації 48, як показано на фіг. 5. Вхідними даними блока компенсації 48 є тиски кіл ВТ і НТ, тиски робочих камер, а також прискорення рухомої частини виконавчого механізму. Крім того, якщо в модуль для оцінки сили, створюваної виконавчим механізмом включені тертя й кінцеві сили виконавчих механізмів, як вхідні дані потрібні також положення й швидкість виконавчого механізму. Вхідні дані пристрою регулювання одержуються, наприклад, з підходящих датчиків, розміщених у системі. Оцінка для нульової точки прискорення, одержана як вихідні дані з блока компенсації 48, подається в регулюючий перетворювач 32. Відвертання й оптимізація відмов у керуючому інтерфейсі Далі розглянемо систему і спосіб для застосування представленої системи, і, особливо, її пристрій регулювання. Через дефектний клапан робота керуючого інтерфейсу порушується, на що треба зважувати в роботі пристрою регулювання, використовуваного для регулювання системи. Принципи вищезазначеного способу можуть застосовуватися у системі, що має два або більше рівнів тиску, у випадку регулювання виконавчого механізму, що містить одну або кілька робочих камер, за допомогою кола керування, в якому у випадку відмови один або кілька клапанів керуючого інтерфейсу залишаються постійно закритими або відкритими. У примірній ситуації ми розглянемо чотирьохкамерний циліндровий виконавчий механізм у системі з подвійним тиском. Якщо клапани залишаються постійно закритими, треба попіклуватися про те, щоб робоча камера виконавчого механізму не залишалася у закритому стані за винятком періоду замикання виконавчого механізму або періоду попереднього стиснення або попереднього розширення робочої камери. Крім того, у випадку заїдання максимальна швидкість виконавчого механізму обмежується, щоб відвернути кавітацію робочих камер, підключених до кіл ВТ і НТ, або надлишковий тиск робочих камер під час переміщень поршня. Закрите положення робочої камери означає, що всі керуючі інтерфейси, що відносяться до зазначеної робочої камери, закриті. Якщо клапани залишаються постійно відкритими, треба попіклуватися про те, щоб контрольні значення у керуючому векторі пристрою регулювання були такого порядку, що сумарні сили, створювані за допомогою їх, були у порядку зростання. Крім того, треба попіклуватися про те, щоб упродовж замикання утримувальна сила виконавчого механізму була достатньою; інакше кажучи, щоб виконавчий механізм не міг "повзти" за межі тиску його камери. Це можливо, якщо залишати робочу камеру, в якій клапани керуючого інтерфейсу заїло у відкритому положенні, незамкненою. 19 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 60 Тепер розглянемо керування відмовами, якщо керуючий інтерфейс або його клапани залишаються відкритими (положення включення) або закритими (положення виключення), виключаючи ситуації замикання, в який керуючий інтерфейс залишений відкритим через відмову клапана. По-перше розглянемо одну робочу камеру виконавчого механізму. На фіг. 1 показаний приклад однієї робочої камери 19 (камера А) цифрового гідравлічного виконавчого механізму, і керуючих інтерфейсів 9 (HP-A) і 10 (LP-A), що керують ним. Коли керуючий інтерфейс HP-A керується таким чином, щоб бути повністю відкритим, а керуючий інтерфейс LP-A керується таким чином, щоб бути повністю закритим, в камері 19 діє тиск лінії ВТ 3. Відповідним чином, коли керуючий інтерфейс HP-A керується таким чином, щоб бути повністю закритим, а керуючий інтерфейс LP-A керується таким чином, щоб бути повністю відритим, в камері 19 діє тиск лінії ВТ 4. У нормальному робочому стані тиски змінюються вище представленим чином, у значній мірі незалежно від швидкості зміни об'єму робочої камери 19, оскільки максимальні пропускні здатності керуючих інтерфейсів передбачені великими відносно об'єму робочої камери. Якщо для кожного керуючого інтерфейсу наявний лише один клапан, і клапан будь-якого керуючого інтерфейсу заїсть у закритому положенні, увесь керуючий інтерфейс відповідно заїсть у закритому положенні. Таким чином, якщо, наприклад, керуючий інтерфейс HP-A заїдає у повністю закритому положенні, керуючий інтерфейс LP-A під час руху виконавчого механізму повинен безперервно утримуватися відкритим, щоб запобігти надмірному підвищенню тиску, або кавітації, в робочій камері. Таким чином, з керуючого вектору пристрою регулювання повинні бути вирізані ті контрольні значення, в яких камера А регулюється до тиску лінії ВТ; інакше кажучи, ті контрольні значення, в яких стан камери А є одиниця (1). Приклад керуючого вектору показаний на фіг. 2, причому посилання робиться на один рядок або стовпчик. Керуючий вектор містить інформацію про різні наявні керуючі комбінації клапанів, а також порядок використання серед зазначених керуючих комбінацій. Порядок використання визначається таким чином, щоб сумарні сили, створювані за допомогою керуючих комбінацій, були у порядку зростання. Відповідним чином, якщо керуючий інтерфейс LP-A заїдає у повністю закритому положенні, під час переміщення виконавчого механізму керуючий інтерфейс HP-A необхідно утримувати безперервно відкритим. Таким чином, з керуючого вектору пристрою регулювання повинні бути вирізані ті контрольні значення, в яких камера А регулюється до тиску лінії НТ; інакше кажучи, ті контрольні значення, в яких стан камери А є нуль (0). Якщо керуючий інтерфейс LP-A заїдає у повністю відкритому положенні, у камері А може створюватися тиск лінії НТ шляхом регулювання керуючого інтерфейсу HP-A таким чином, щоб закрити його. Альтернативно, керуючий інтерфейс HP-A керується таким чином, щоб бути відкритим, і при цьому потік короткого замикання середовища під тиском тектиме через керуючі інтерфейси HP-A і LP-A безпосередньо з лінії ВТ в лінію НТ. Тиск у камері А буде, таким чином, встановлюватиметься приблизно посередині між тиском лінії ВТ і тиском лінії НТ, яке може називатися ще проміжним тиском. Таким чином, сумарна сила, створювана кожною керуючою комбінацією у керуючих векторах, перераховується на основі робочих поверхонь і тисків ліній ВТ і НТ, й одночасно припускається, що зазначений проміжний тиск діє у камері А завжди, коли її стан є одиниця (1). Керуючий вектор перебудовується таким чином, що відповідні створювані сумарні сили є у порядку зростання. Альтернативно, якщо керуючий інтерфейс HP-A заїдає у повністю відкритому положенні, у камері А можна створювати або тиск лінії ВТ шляхом регулювання керуючого інтерфейсу LP-A таким чином, щоб закрити його, або зазначений проміжний тиск шляхом регулювання керуючого інтерфейсу LP-A таким чином, щоб відкрити його, і при цьому відповідний потік короткого замикання виникає ізнов. При перебудуванні керуючого вектора і при перерахуванні створюваних сумарних сил припускається, що зазначений проміжний тиск діє у камері А завжди, коли її стан є нуль (0). Якщо керуючий інтерфейс, підключений до коло НТ, або його клапан, заїдає у закритому положенні, це лише відбивається на здатності робочої камери, підключеної до зазначеного керуючого інтерфейсу, досягти рівня тиску кола НТ під час переміщення виконавчого механізму. Відповідним чином, якщо керуючий інтерфейс, підключений до кола ВТ, або його клапан, заїдає у закритому положенні, це лише відбивається на здатності робочої камери, підключеної до зазначеного керуючого інтерфейсу, досягти рівня тиску кола ВТ. Далі розглянемо приклад, в якому один або кілька керуючих інтерфейсів містять два або більше клапанів, включених паралельно, які разом пропускають потрібну результуючу об'ємну витрату, залежно від пропускної здатності кожного клапана. У кожному клапані втрата тиску підтримується якомога малою. Клапани є різними або, наприклад, ідентичними 20 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 двохпозиційними клапанами. Якщо будь-який клапан у будь-якому керуючому інтерфейсі заїдає у закритому положенні, і при цьому у зазначеному керуючому інтерфейсі ще й досі є залишаються працюючі клапани, ця відмова у статичному стані виконавчого механізму не справлятиме значного впливу на складову сили, створювану зазначеною робочою камерою і, відтак, на сумарну силу, створювану виконавчим механізмом. Статичний стан означає стан, в якому виконавчий механізм не рухається, і контрольне значення виконавчого механізму залишається постійним у часі, хоча контрольне значення виконавчого механізму може ще й досі бути будь-яким з дискретних контрольних значень виконавчого механізму. У вищеописаній ситуації тиск лінії ВТ або лінії НТ створюватиметься в робочій камері у намічений спосіб. Однак тепер керуючий інтерфейс, в якому клапан заїло у закритому положенні, є вужчим за інші керуючі інтерфейси, і його пропускна здатність знизилася у порівнянні до ситуації до відмови; інакше кажучи, об'ємна витрата при тій самій різниці тиску зменшена. Через це у змінах стану зазначеної робочої камери може виникнути інерція у порівнянні до змін стану інших робочих камер, на яку (інерцію) необхідно зважувати. Через цю відмову рівень тиску також встановлюється повільніше до потрібного значення, і, крім того, коли робоча камера розширюється, тиск робочої камери залишається нижчим, ніж нормально нижче цільового рівня тиску, а коли робоча камера стискається, тиск робочої камери підвищується вище, ніж нормально, над цільовим рівнем тиску. Відхилення тиску від цільового тиску залежатиме від швидкості зміни об'єму робочої камери і пропорції пропускної здатності несправного клапан відносно пропускної здатності усього керуючого інтерфейсу. Через це максимальна швидкість виконавчого механізму повинна обмежуватися таким чином, щоб відхилення тиску робочої камери, що відбуваються під час переміщення, не ставали би настільки великими, що сумарні сили, створювані органами керування, вже не були б у порядку зростання. Якщо керуючий інтерфейс, підключений до кола НТ, заїдає у відкритому положенні, це не відбивається на здатності відповідної робочої камери досягти рівня тиску кола НТ. Відповідним чином, якщо керуючий інтерфейс, підключений до кола ВТ, заїдає у відкритому положенні, це не відбивається на здатності робочої камери досягти рівня тиску кола ВТ. Якщо будь-який клапан керуючого інтерфейсу заїдає у відкритому положенні, і керуючий інтерфейс має бути закритим, це справлятиме безумовний вплив на складову сили, створювану робочою камерою, і сумарну силу, створювану виконавчим механізмом. Якщо робоча камера повинна мати тиск кола НТ, і, наприклад, один клапан керуючого інтерфейсу HP-A заїдає у відкритому положенні, між керуючими інтерфейсами HP-A і LP-A виникає потік короткого замикання з лінії ВТ в лінію НТ. Таким чином, проміжний тиск, що залишається в робочій камері, безсумнівно вище за тиск кола НТ. Відповідним чином, якщо робоча камера повинна мати тиск кола ВТ, і, наприклад, один клапан керуючого інтерфейсу LP-A заїдає у закритому положенні, в робочій камері залишається проміжний тиск, який є безсумнівно нижчий за тиск ВТ. У статичному стані виконавчого механізму тиск робочої камери описується формулою: p pLP , де pkammio pHP HP A HP 1 A LP A HP - сума площ пропуску відкритих клапанів у керуючому інтерфейсі лінії ВТ A LP - сума площ пропуску відкритих клапанів у керуючому інтерфейсі лінії НТ Пропускна здатність клапана пропорційна його площі пропуску. У випадку чотирьохкамерного виконавчого механізму розрахунками встановлено, що відхилення проміжного тиску від цільового тиску (ВТ/НТ) є відносно малим, якщо у відкритому або закритому положенні заїдають менш 1/3 сум площ пропуску клапанів керуючого інтерфейсу. Таким чином, у статичному стані порядок величини сумарних сил, створюваних виконавчим механізмом, не змінюватиметься, і при цьому порядок контрольних значень керуючому векторі пристрою регулювання зміни не потребує, й у випадку відмови можна використовувати початковий керуючий вектор. Вище було припущено, що за раз виходить з ладу один клапан, оскільки одночасна відмова кількох клапанів є дуже малоймовірною. Якщо одночасно виходять з ладу кілька клапанів, здійснюється спроба замкнути виконавчий механізм і механізм, регульований ним, у положенні, якщо можливо. Крім того, припущено, що реалізовані положення клапанів можуть перевірятися, наприклад, за допомогою датчиків, і що можливо порівнювати, чи відповідає реалізоване положення положенню відповідно до контрольного значення, дане пристроєм регулювання. Положення залежатиме від стану клапана. На підставі порівнянні можна дійти висновку, який клапан несправний, і в якому положенні він заїв. На підставі цього висновку можна здійснити 21 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 60 необхідні зміни у пристрої регулювання, щоб внести компенсацію на відмову і використовувати пристрій регулювання для регулювання клапанів, які ще й досі у робочому стані. Далі ми представимо роботу алгоритму, що відноситься до відмови, за допомогою прикладу. Ті самі принципи застосовуються й у випадку виконавчого механізму, в якому число камер є інше, ніж чотири, й (або) для кожної робочої камери наявні кілька рівнів тиску. У керуючих інтерфейсах може застосовуватися змінне число клапанів, і відносні пропускні здатності клапанів можуть варіюватися. У цьому прикладі представлений вище чотирьохкамерний циліндровий виконавчий механізм використовується у представленій у цифровій гідравлічній системі подвійного тиску. Обидва керуючі інтерфейси кожної робочої камери містять, наприклад, два клапани з різними пропускними здатностями. У керуючому інтерфейсі може використовуватися будь-яке співвідношення між пропускними здатностями або площами пропуску клапанів, наприклад 1:1 або 20:1. Відтак, є разом 16 клапанів у керуючих інтерфейсах, і стани й положення клапанів, що керують виконавчим механізмом, можна однозначно представити 16-значним або 16-бітовим двійковим числом, наприклад, у порядку HP-A, LP-A, HP-B, LP-B, HP-C, LP-C, HP-D, LP-D, де двійкове число стає 00 00 00 00 00 00 00 00 або 11 11 11 11 11 11 11 11 й усі двійкові числа між цими числами. Доцільно розподілити значимість між бітами двійкового числа таким чином, що значимість є пропорційною розміру робочої камери, що відповідає кожному керуючому інтерфейсу; інакше кажучи, біти, що вказують на керуючі інтерфейси робочої камери з найбільшою робочою поверхнею, мають найбільшу значимість. Те сама стосується клапанів того самого керуючого інтерфейсу, причому ураховується пропускна здатність. Значимість між бітами керуючих інтерфейсів ліній ВТ і НТ, підключених до тієї самої робочої камери, є питанням домовленості. Якщо усі клапани слідують своїм відповідним контрольним значенням (відкритий/закритий, включений/виключений, 1/0) упродовж встановлених часів відгуку, фактичне значення після затримки часу відгуку можна зробити такими, що відповідають контрольному значенню. Отже, різниця між двійковими числами, що відповідають фактичному значенню, і контрольним значенням, є, таким чином, нуль. Якщо будь-яке фактичне значення керуючого інтерфейсу, тобто, стан клапана, відхиляється від контрольного значення достатньо помітно, можна стверджувати, що має місце ситуація відмови. Про несправний клапан і тип відмови (заїдання у відкритому або закритому положенні) можна дійти висновку за значенням різниці між двійковими числами, що відповідають контрольному значенню і фактичному значенню, оскільки величина зазначеної різниці визначається значимістю біта, що регулює клапан. У 16-бітовій системі найменш значимий біт, тобто, найменший клапан керуючого інтерфейсу LP-D, дає у ситуації відмови різницю +/- 1 (+/2°) залежно від типу відмови. Відповідним чином, найзначиміший біт дасть різницю +/- 32768 15 (+/- 2 ) залежно від типу відмови. Якщо біти двійкового числа представляють послідовність керуючого інтерфейсу HP-A, LP-A, HP-B, LP-B, HP-C, LP-C, HP-D, LP-D і різниця між контрольним значенням і фактичним 13 значенням є, наприклад, +8192 (2 ), можна знайти, що найбільший клапан керуючого інтерфейсу LP-A заїдає у відкритому положенні. За показником степеня різниці можна дійти висновку, що шуканим є тринадцятий біт, оскільки показники степеня починаються з нуля; інакше кажучи, чотирнадцятий біт двійкового числа, рахуючи справа, і значніший біт керуючого інтерфейсу LP-A. За знаком різниці можна дійти висновку, що клапан заїдає увідкритому положенні, оскільки двійкове число фактичного значення клапанів, від якого двійкове число директивного значення віднімається, є більшим за двійкове число директивного значення. Тепер відомо, що відношення клапанів керуючого інтерфейсу LP-A є, наприклад, 20:1, і більший клапан заїдає у відкритому положенні. Крім того, відомо, що пропускні здатності керуючого інтерфейсу HP-A є у нормальному стані, наприклад, ідентичними з керуючим інтерфейсом LP-A, отже, максимальну пропускну здатність керуючого інтерфейсу HP-A можна представити показником степеня 21 (20+1). Таким чином, в робочій камері завжди утворюється тиск кола НТ, коли стан робочої камери є станом 0, але коли стан робочої камери зміниться на стан 1, робоча камера не досягне тиску кола ВТ, і в робочій камері залишиться проміжний тиск, оскільки у керуючому інтерфейсі LP-A є заївший клапан. Зазначений проміжний тиск у статичному стані виконавчого механізму можна розрахувати за представленою вище формулою, в якій відношення Ahp/Alp тепер відповідає відношенню 21/20. Використовуючи проміжний тиск, можна розрахувати усі складові сил і сумарні сили, що створюватимуться, для усіх ситуацій відмови, в яких клапан заїдає у відкритому положенні. У таблиці В показані стани робочих камер виконавчих механізмів і величина сумарної сили (No_err) у випадку, коли у системі немає відмов. З перерахованої сумарної сили (LP-A open) 22 UA 103207 C2 видно, що у статичному стані сумарні сили вже не є у порядку зростання, і, відтак, керуючий вектор, що описує контрольні значення (dec(0…15)), має бути перелаштований, як показано у таблиці C, щоб сумарні сили були у порядку зростання, який може використовуватися пристроєм регулювання. 5 Таблиця B u% дес (0…15) 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 5 4 7 6 1 0 3 2 13 12 15 14 9 8 11 10 Двійкові контрольні значення камера A B c D 0 1 0 1 0 1 0 0 0 1 1 1 0 1 1 0 0 0 0 1 0 0 0 0 0 0 1 1 0 0 1 0 1 0 1 1 0 0 1 1 1 1 1 0 0 0 1 0 0 0 0 1 1 0 1 0 No_err -38,46 -30,13 -22,12 -13,79 -5,21 3,12 11,12 19,45 27,31 35,64 43,64 51,97 60,55 68,88 76,89 85,22 LP-A open -38,45859 -30,12709 -22,12231 -13,79081 -5,214258 3,117245 11,12202 19,45353 -3,97368 4,357824 12,3626 20,69411 29,27065 37,60216 45,60694 53,93844 Таблиця С u% 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 10 15 дес (0…15) 5 4 7 6 1 13 0 12 3 15 2 14 9 8 11 10 Двійкові контрольні значення камера A B c D 0 1 0 1 0 1 0 0 0 1 1 1 0 1 1 0 0 0 0 1 1 1 0 1 0 0 0 0 1 1 0 0 0 0 1 1 1 1 1 1 0 0 1 0 1 1 1 0 1 0 0 1 1 0 0 0 1 0 1 1 1 0 1 0 No err -38,46 -30,13 -22,12 -13,79 -5,21 27,31 3,12 35,64 11,12 .43,64 19,45 51,97 60,55 68,88 76,89 85,22 LP-Aopen -38,45859 -30,12709 -22,12231 -13,79081 -5,214258 -3,97368 3,117245 4,357824 11,12202 12,3626 19,45353 20,69411 29,27065 37,60216 45,60694 53,93844 Представлений вище алгоритм може застосовуватися, й коли до однієї робочої камери можна підключити кілька зарядних кіл з різними рівнями тиску. Таким чином, вирізаються такі контрольні значення, в яких фактичні стани керуючих інтерфейсів через несправні клапани не відповідають потрібним станам, особливо, якщо відмова справляє значний вплив на сумарну силу, створювану виконавчим механізмом із зазначеним контрольним значенням. Застосування цифрового гідравлічного виконавчого механізму Тепер розглянемо використання цифрового гідравлічного виконавчого механізму у цифровій гідравлічній системі. Виконавчий механізм представляє собою, зокрема, цифровий циліндр, і його випадки застосування включають різноманітні помпи, мотори, пристрої зарядки енергії, перетворювачі тиску, перетворювачі енергії, поворотні приводи й обертові приводи. Приклад на фіг. 1 містить цифровий циліндр, робота якого вже розглянута вище. Приклад поворотного приводу на фіг. 9 містить поворотний пристрій, що перетворює лінійний рух на 23 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 обертальний рух, в якому використовується представлена вище система. У конструкції і частинах поворотного пристрою можна використовувати відповідні відомі елементи поворотного пристрою. Приклад обертового приводу на фіг. 10 містить цифрову гідравлічну помпу-мотор, в якій використовуються циліндрових виконавчих механізмів, і яка може використовуватися як цифровий гідравлічний двигун і як помпа у цифровій гідравлічній системі. Приклад на фіг. 11 містить цифровий гідравлічний перетворювач тиску 112 (ЦГПТ) (на фігурі позначений DPCU), в якому використовуються кілька цифрових циліндрів, а інші приклади показані на фіг. 15 і 16. Приклад на фіг. 12 містить цифровий гідравлічний помповий перетворювач тиску 122 (ЦГППТ) (на фігурі позначений DPCPU), в якому використовуються кілька цифрових циліндрів, і який за допомогою рухової деталі 123 підключений до джерела зовнішньої енергії, а інші приклади показані на фіг. 14 і 17. Цифровий гідравлічний поворотний пристрій У прикладі на фіг. 9 поворотний пристрій 41 містить, наприклад, зубчасті рейки 45 і 46, які обертають поворотне зубчасте колесо 47. Поворотний пристрій встановлений, наприклад, на рамі рухомої робочої машини, і поворотне зубчасте колесо використовується для повороту кабіни або крана робочої машини. Зазвичай поворотний пристрій містить засоби, що перетворюють лінійний рух на обертальний рух. Лінійний рух здійснюється за допомогою циліндра, а обертальний рух - за допомогою обертового вала. Поворотний пристрій з регульованим моментом зазвичай реалізується з двома виконавчими механізмами 42 і 43, підключеними паралельно, кожний виконавчий механізм на своїй власній зубчастій рейці 45 або 46 таким чином, що штоки поршнів виконавчих механізмів направлені в одному напрямку, причому коли один виконавчий механізм стає довшим, другий стає коротшим. Зубчасті рейки встановлені паралельно збоку виконавчих механізмів і призначені для приводу поворотного зубчастого колеса 47 з обох боків. У цьому випадку рами виконавчого механізму є рухомими, і шток поршня встановлений нерухомо на поворотному пристрої і, відтак, на рамі робочої машини. Максимальна сумарна сила виконавчих механізмів, що прикладається ними на поворотне зубчасте колесо 47 є у цьому випадку сумою максимальної тягової сумарної сили одного виконавчого механізму і максимальної штовхаючої сумарної сили другого виконавчого механізму. Сумарний момент Mtot поворотного пристрою у кожному напрямку обертання є, таким чином, у своєму максимумі й утворений як сума максимальної сумарної сили кожного виконавчого механізму і розрахованих добутків радіуса R поворотного зубчастого колеса 47. Поворотний пристрій 41 керується колом керування, в якому для кожної робочої камери виконавчого механізму поворотного пристрою передбачений керуючий інтерфейс, за допомогою якого зазначена робоча камера може підключатися або до низького тиску НТ, або високого тиску ВТ. За виконуваними ним функціями коло керування відповідає колу керування 40 на фіг. 1 і реалізує необхідні підключення для середовища під тиском. Число станів поворотного пристрою залежить від структури виконавчих механізмів 45, 46. Існує кілька альтернатив для забезпечення регулювання виконавчих механізмів. У випадку кількох виконавчих механізмів число станів поворотного пристрою 41 утворюється як b показникова функція a , в якій основа a -число станів органів керування виконавчого механізму, n наприклад a = 2 , де n - число робочих камер, а показник степеня b - число виконавчих механізмів. У випадку двох виконавчих механізмів з двома робочими камерами кожен число станів є 16, а у випадку двох виконавчих механізмів з чотирма робочими камерами кожен число станів є 256. Кожний стан відповідає значенню моменту Mtot. Кожний виконавчий механізм керується колом керування відповідно до фіг. 1. Якщо виконавчі механізми 45, 46 є однаковими або мають робочі камери з однаковими робочими поверхнями, загальне число різних станів залишатиметься меншим через неробочі стани, і той самий повний момент Mtot досягатиметься у двох або більше станах. У прикладі на фіг. 9 виконавчі механізми ідентичні, і кожен містить чотири робочі камери таким самим чином, як виконавчий механізм 23 на фіг. 1, причому кожен виконавчий механізм може використовуватися для створення 16 різних сил через використання рівного ступеневого змінювання. Таким чином, якщо з розрахунків випустити неробочі стани, загальне число станів є 31. Число станів є меншим на один стан, аніж загальне число станів двох виконавчих механізмів, оскільки стан, який дає нульовий момент, є спільним для обох виконавчих механізмів. Поворотний пристрій має принаймні один стан, який дає нульовий момент, коли сумарні сили виконавчих механізмів додають одна одну, а також 15-ступеневе регулювання моменту в одному напрямку обертання і 15-ступеневе регулювання моменту у протилежному напрямку обертання. Робочі поверхні робочих камер виконавчих механізмів кодуються переважно двійковими ваговими коефіцієнтами, щоб забезпечити рівномірно ступенево змінне регулювання моменту. Крім того, циліндри переважно є ідентичними. 24 UA 103207 C2 5 10 Станами, вибраними для створення нульового моменту, можуть бути будь-які стани виконавчих механізмів, наприклад, стани додатних або від'ємних граничних сил або будь-який стан між ними, наприклад, з середнього діапазону. Якщо виконавчі механізми однакові за розмірами, поворотний пристрій створює нульовий момент кожного разу, коли контрольні значення виконавчих механізмів дорівнюють одне одному. Інакше кажучи, початковий напружений стан, створений нульовим контрольним значенням, може створюватися у будь-яких станах виконавчого механізму (у випадку виконавчих механізмів з чотирма камерами, рівнями сили від 0 до 15). Таким чином, степені моменту можуть також створюватися численними шляхами, наприклад таким чином, що один виконавчий механізм працює у насиченому діапазоні, а другий - у своєму лінійному діапазоні, коли регулювання моменту здійснюється в одному напрямку обертання, і, відповідним чином, реверсивно, коли регулювання моменту здійснюється в іншому першому напрямку обертання (див. альтернативи 1 і 2 у таблиці А). Таблиця А Альтернатива 1 Альтернатива 2 Альтернатива 3 Альтернатива 4 і т.д. Контрольне Контрольне Контрольне Контрольне Контрольне Контрольне Контрольне Контрольне Контрольне значення значення значення значення значення значення значення значення значення системи Cyl1 Cyl2 Cyl1 Cyl2 Cyl1 Cyl2 Cyl1 Cyl2 u% u1 % u2 % u1 % u2 % u1 % u2 % u1 % u2 % 0 0 15 0 15 0 15 0 15 1 0 14 1 15 0 14 1 15 2 0 13 2 15 1 14 2 15 3 0 12 3 15 1 13 2 14 4 0 11 4 15 2 13 2 13 5 0 10 5 15 2 12 12 6 0 9 6 15 3 12 3 12 7 0 8 7 15 3 11 4 12 8 0 7 8 15 4 11 5 12 9 0 6 9 15 4 10 5 11 10 0 5 10 15 5 10 5 10 11 0 4 11 15 5 9 5 9 12 0 3 12 15 6 9 6 9 13 0 2 13 15 6 8 7 9 14 0 1 14 15 7 8 8 9 15 0 0 15 15 7 7 8 8 16 1 0 15 14 8 / 8 / 17 2 0 15 13 8 6 8 6 18 3 0 15 12 9 6 9 6 19 4 0 15 11 9 5 10 6 20 5 0 15 10 10 5 11 6 21 6 0 15 9 10 4 11 5 22 7 0 15 8 11 4 11 4 23 8 0 15 7 11 3 11 3 24 9 0 15 6 12 3 12 3 25 10 0 15 5 12 2 13 3 26 11 0 15 4 13 2 14 3 27 12 0 15 3 13 1 14 2 28 13 0 15 2 14 1 14 1 29 14 0 15 1 14 0 14 0 30 15 0 15 0 15 0 15 0 15 20 Якщо стани, які створюють нульовий момент, вибираються із середнього діапазону станів виконавчого механізму, ступені моменту також можуть створюватися зміною станів виконавчих механізмів альтернативним чином так, що обидва виконавчі механізми можуть працювати у своєму лінійному діапазоні в межах усього діапазону моменту (див. альтернативу 3 у таблиці А). Робота у лінійному діапазоні виконавчих механізмів означає, що ненасичене дискретне контрольне значення виконавчого механізму не перевищує максимальне значення насиченого дискретного контрольного значення (u%) у діапазоні показників степеня станів виконавчих механізмів. Зміна стану може також здійснюватися через дві або три ступені (див. альтернативу 4 у таблиці A) або з використанням будь-якого іншого алгоритм перестановки, приклади якого наводяться у доданій таблиці А. 25 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 60 Для регулювання поворотного пристрою можна використовувати пристрій регулювання 24, показаний на фіг. 5, 6 або 7, регулюючий перетворювач 32 якого розширюється таким чином, що його можна використовувати для регулювання достатнього числа керуючих інтерфейсів, які визначають стани виконавчих механізмів. Таблиця, показана на фіг. 2, розширюється таким чином, що число показників степеня відповідає різним контрольним значенням, значення в стовпчиках додаються для представлення різних станів системи, двійкове число, яке вказує двійкові стани камер, збільшується (інакше кажучи, число двійкових чисел, які вказують двійкові контрольні значення виконавчих механізмів збільшується відповідно до числа виконавчих механізмів), і стовпчики, які представляють двійкові стани керуючих інтерфейсів, збільшується через збільшення керуючих інтерфейсів. Крім того, можна використовувати встановлене значення 31, пропорційне моменту, що має бути створеним, і напрямок обертання поворотного пристрою. Через те, що момент що має бути створеним, є прямо пропорційним сумарній силі, створюваній виконавчими механізмами (коефіцієнтом є радіус R поворотного зубчастого колеса 47), ще й досі можна використовувати для регулювання контрольне значення 31 діючої сили, описане у зв'язку з фіг. 5, яке можна обробляти, як представлено у зв'язку фіг. 8. Систему з регульованим прискоренням можна перетворити на систему з регульованою швидкістю, як представлено вище. Пристрій регулювання поворотного пристрою може також бути реалізованим у вигляді двох паралельних пристроїв регулювання, показаних на фіг. 5. 6 або 7, причому кожен пристрій регулювання регулює один виконавчий механізм 42 або 43. Це можливо, оскільки впливи сили, створювані виконавчими механізмами 45 і 56, є також окремими. Відносне контрольне значення 31 для діючої сили (прискорення), контрольне значення 28 для швидкості або контрольне значення 26 для положення можна вводити як вхідні дані в обидва перетворювачі, які розраховуватимуть положення, що відповідають потрібному прискоренню для регулюючих клапанів кожного виконавчого механізму відповідно до ситуації навантаження. Як вже йшлося, у зв'язку зі змінами стану витрачається енергія. Характерним для регулювання виконавчих механізмів є те, що відбувається є між контрольним значенням, що відповідає нульовій точці прискорення, і контрольними значеннями, найближчими до неї з кожного боку, де відбуваються більшість змін стану. Оскільки у цій системі поворотного пристрою початковий напружений стан циліндрових виконавчих механізмів можна вільно вибирати, це контрольне значення для нульового моменту можна вибирати з таблиці станів системи, від якого контрольного значення найближчі зміни стану в обох напрямках споживають якомога мало енергії. Ці контрольні значення включають, наприклад, у випадку виконавчого механізму з чотирма камерами, контрольні значення 10 і 5. У системі поворотного пристрою можливо також використовувати вищезазначені попереднє стиснення і попереднє розширення, зокрема, за допомогою затримок, регульованих пристроєм регулювання. Цифрова гідравлічна помпа-мотор й обертовий пристрій Далі розглянемо цифрову гідравлічну помпа-мотор, що може використовуватися у цифровій гідравлічній системі і як цифрова гідравлічна помпа, і як гідравлічний двигун. Вищеописана система може використовуватися й у помпі-моторі. У прикладі на фіг. 10, цифрова гідравлічна помпа-мотор 49 містить, наприклад, чотири виконавчі механізми 50, 51, 52, і 53, які представляють собою циліндри й обертають обертовий елемент 54, який має вісь обертання X, і до якого на певній відстані від вісі обертання підключені виконавчі механізми. Виконавчі механізми разом здатні створювати повний момент Mtot, який діє на обертовий елемент 54 (або ексцентрик 54) і приводить навантаження. Переважно, усі виконавчі механізми мають спільну з'єднувальну точку 55. Пристрій 49 встановлений, наприклад, при використанні для поворотного гідромотора, на рамі рухомої робочої машини і використовується для повороту кабіни або крана робочої машини. Відповідним чином, при використанні для помпи обертовий елемент підключений, наприклад, до привідного валу. Зазвичай пристрій використовується в приводах помп, двигунів або помпмоторів, в яких обертовий елемент (54) перетворює лінійний рух на обертальний рух. Привід помпи-мотора з безперервно обертовим шляхом найпростішим чином одержується шляхом підключення двох виконавчих механізмів з регульованою силою до обертового елемента 54 в ексцентричний спосіб із фазовим зсувом 90°. Зокрема, як виконавчий механізм використовується виконавчий механізм, описаний вище і показаний на фіг. 1. Однак, оскільки виконавчий механізм є асиметричним у частині своїх максимальних сил, тобто, максимальна сила є більшою у додатному напрямку (штовхання), ніж у від'ємному напрямку (тягнення), максимальний повний момент Mtot стає відносно асиметричним, тобто, максимальний момент, досягнутий в одному напрямку обертання, відрізнятиметься від максимального моменту в іншому напрямку обертання. З цієї причини є виправданим підключати до обертового елемента 26 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 54 принаймні три циліндрових виконавчих механізми в ексцентричний спосіб із фазовим зсувом 120°, щоб зробити максимальний повний момент більш симетричним. Крім того, більш симетричний максимум моменту в обох напрямках досягається при підключенні до обертового елемента 54 чотирьох циліндрів із фазовим зсувом 90°, як показано на фіг. 10. У цифровій помпі-моторі 49 і системі, що керує нею, включаючи пристрій регулювання, енергозберігаюча оптимізація початкових напружених станів може реалізовуватися через застосування тих самих принципів, що й у поворотному пристрої, розглянутому вище із посиланнями на фіг. 9. З'єднувальні точки виконавчих механізмів - це зчленовані з'єднувальні точки 56, 57, 58, і 59 (J1, J2, J3, і J4 відповідно), в яких виконавчі механізми з'єднуються з рамою 60 пристрою. Як показано на цій фігурі, кожний виконавчий механізм підключений між спільною ексцентричною зчленованою діючою точкою P (з'єднувальною точкою 55) і вищезазначеними зчленованими з'єднувальними точками, розміщених з однаковими інтервалами по поворотному колу. Відстані між з'єднувальними точками і центром обертання O (віссю обертання X) дорівнюють одна одній; дорівнюють один одному і кути фазового зсуву, якщо дивитися перпендикулярно поворотному колу. У цьому примірному випадку використовуються чотири циліндрові виконавчі механізми з кутами фазового зсуву 90°. Радіус-вектор ексцентрика - це вектор R, накреслений від центра обертання O ексцентрика до спільної ексцентричної з'єднувальної точки P виконавчих механізмів. Вектори діючих важелів r1, r2. r3 і r4 (вектор rn) виконавчих механізмів - це найкоротший вектор, накреслений від центра обертання ексцентрика до прямої лінії діючої сили виконавчого механізму, який є, таким чином, під прямим кутом до прямої лінії діючої сили, створюваної виконавчим механізмом. На фіг. 10, виконавчі механізми 50 і 52 знаходяться на своїх верхньому й нижньому кінцях ходу відповідно, і при цьому їх вектори діючих важелів є нульовими векторами. Довжина вектора діючого важеля виконавчого механізму прийнята додатною, якщо штовхаюча або додатна сила, створювана виконавчим механізмом, створює додатний момент (проти годинникової стрілки) для ексцентрика. Таким чином, з'єднувальна точка P знаходиться на правій половині кола обертання, якщо дивитися зі з'єднувальної точки виконавчого механізму. Відповідним чином, довжина вектора діючого важеля прийнята від'ємною, якщо додатна (штовхаюча) сила, створювана відповідним виконавчим механізмом, створює від'ємний момент для ексцентрика (за годинниковою стрілкою). Таким чином, з'єднувальна точка P знаходиться на лівій половині кола обертання, якщо дивитися зі з'єднувальної точки виконавчого механізму. У цьому документі діючий важіль виконавчого механізму - це довжина вектора діючого важеля. Виконавчі механізми 50, 51, 52 і 53 створюють поодинокі вектори сили F1, F2, F3 і F4 відповідно. Напрямок цих векторів сили є паралельним відрізку прямої, проведеної від з'єднувальної точки кожного виконавчого механізму до діючої точки P ексцентрика, однак, таким чином, що напрямок діючої сили може бути або штовхаючим, або тяговим, тобто, додатним або від'ємним. Результуючий вектор сили Ftot - це сумарний вектор векторів сили, створюваних поодинокими виконавчими механізмами. Відносний діючий важіль виконавчого механізму - це відношення довжини діючого вектора до максимального значення довжини вектора діючого важеля. Таким чином, для відносного діючого важеля кожного виконавчого механізму застосовне таке: rn rrel _ n rmax_ n Числове значення змінної стає нулем кожного разу, коли виконавчий механізм знаходиться у своїх мертвих точках, й одержує значення +1 або -1, коли важіль знаходиться у положення своєї максимальної довжини у додатному або від'ємному напрямку. Максимальні довжини важеля мають місце у точках, де пряма лінія дії сили виконавчого механізму перетинає дотичну кола обертання діючої точки P ексцентрика. Далі розглянемо систему регулювання цифрової помпи-мотора і її принцип дії. Відносне контрольне значення для кожного поодинокого виконавчого механізму пристрою одержується множенням відносного контрольного значення моменту поворотного приводу на довжину відносно діючого важеля зазначеного виконавчого механізму. У цьому примірному випадку мета полягає у створенні додатного моменту; інакше кажучи, напрямок моменту є проти годинникової стрілки. Коли два виконавчі механізми 50 і 52, розміщені навпроти один одного, знаходяться у своїх мертвих точках, інші два виконавчі механізми 51 і 53 розміщуються симетрично як дзеркальні відображення один одного відносно радіуса-вектора R ексцентрика. Таким чином, діючі важелі r2 і r3 виконавчих механізмів 50 і 52 також відображаються відносно радіуса-вектора R; тобто, вони однакові за довжиною, але мають протилежні знаки, і при цьому 27 UA 103207 C2 5 10 15 20 25 30 35 40 45 50 55 60 вектори сили F1 і F3 масштабовані однаково довгими відносно однин одного і розміщені симетрично відносно вертикального відрізку лінії, проведеному через точку P. Таким чином, результуючий вектор сили Ftot стає вертикальним, тобто, розміщений під прямим кутом до радіуса-вектора R ексцентрика. У мертвих точках виконавчих механізмів 51 і 53 вектори сили зазначених виконавчих механізмів є нульовими векторами, оскільки їх діючі важелі r2 і r4 є нульовими векторами, відповідно до яких вектори сили масштабовані. На півдорозі між мертвими точками виконавчі механізми 50 і 53 розміщаються симетрично один одному відносно радіуса-вектора R, так само, як і виконавчі механізми 51 і 52. Таким чином, діючі важелі r2 і r3 також відбиваються відносно радіуса-вектора R, так само, як і вектори важелів r1 і r4. Таким чином, сумарний вектор сил F 2 і F3 розміщений паралельно дотичній кола обертання діючої точки P ексцентрика 35, так само, як і сумарний вектор сил F1 і F4. Таким чином, повний результуючий вектор також паралельний дотичній кола обертання діючої точки P, тобто, під прямим кутом до радіуса-вектора ексцентрика. Результуючий вектор сили Ftot знайдений таким, що проходить під прямим кутом до радіусавектора R ексцентрика також з іншими значеннями обертання. З цього можна дійти висновку, що у цьому способі масштабування результуючий вектор сили F tot завжди проходить майже під прямим кутом до радіуса-вектора R, якщо виконавчі механізми діють у своїх лінійних діапазонах. Цифрова гідравлічна помпа-мотор може використовуватися у цифровій гідравлічній системі, а також без будь-яких обмежень у звичайній гідравлічній системі як привід двигуна з регульованим моментом або силою, який також повертає кінетичну енергію, зв'язану з механізмом, назад у гідравлічну систему у разі потреби. Цифрова гідравлічна помпа-мотор може у разі потреби використовуватися також як гідравлічна помпа з регульованим pQ (p = тиск, Q = об'ємна витрата). Таким чином, момент, створюваний циліндрами, задається у протилежному напрямку як момент, спрямований на механізм ззовні. Використання робочих поверхонь циліндрів дозволяє регулювати тиск, об'ємну витрату, привідний момент і керування витратою. При використанні як помпа об'ємна витрата і максимальний тиск, створюваний пристроєм, пропорційні робочій поверхні і, відтак, і привідному моменту. Таким чином можна оптимізувати, наприклад, робочий діапазон двигуна внутрішнього згоряння, що служить приводом помпи, щоб досягти найкращої можливої ефективності. Якщо помпа-мотор використовується у цифровій гідравлічній системі як гідравлічна помпа, це може потребувати, щоб помпа-мотор була підключена й до бака через окремі керуючі інтерфейси. Фіг. 13a і 13b ілюструють підключення цифрової помпи-мотора до системи, наприклад, показаної на фіг. 11. Підключення виконується до зарядних кіл або підкіл. Енергозберігаюча оптимізація початкових напружених станів може реалізовуватися таким самим чином, як й у поворотному пристрої, представленому вище. При регулюванні цифрової помпи-мотора, комбінація контрольних значень виконавчих механізмів для створення нульового моменту може вибиратися будь-які контрольні значення, з якими сума моментів, розрахована для кожного виконавчого механізму, дорівнює нулю. Таким чином такий діапазон регулювання кожного виконавчого механізму, в якому виконавчий механізм здійснює найбільше число змін стану, можна вибирати потрібним чином. Регулювання чотирьох виконавчих механізмів у цифровій помпі-моторі можна реалізувати серед інших шляхів перетворенням непрямого регулювання моменту безпосередньо на регулювання виконавчих механізмів, але таким чином, що у верхньому і нижньому кінцях ходу виконавчого механізму знак регулювання змінюється. При цьому увага приділяється тому, що додатне непряме регулювання моменту забезпечуватиме створення сили поодинокому виконавчому механізму, створюючому додатний момент у механізмі. Чотири виконавчі механізми можуть також регулюватися таким чином, що непряме регулювання моменту масштабується для регулювання виконавчого механізму пропорційно до діючого відносного важеля виконавчого механізму. Крім того, змінною, що використовується для масштабування регулювання поодинокого виконавчого механізму, може також бути інша змінна, розрахована на основі обертання, за допомогою якої мета полягає у тому, щоб тримати сумарний вектор сил, створених циліндрами, під прямим кутом до радіусавектора ексцентрика. Цифровий гідравлічний перетворювач тиску і помповий перетворювач тиску На фіг. 11 показаний цифровий гідравлічний перетворювач тиску 112. Одна проста реалізація перетворювача тиску показана на фіг. 15, в якій перетворювач тиску містить два подвійної дії і двокамерні циліндрові виконавчі механізми, з'єднаних між собою опозитно один одному, причому штоки поршнів з'єднуються. Об'єднані штоки поршнів утворюють рухому деталь. Переважно, зовнішні оболонки циліндрових виконавчих механізмів також з'єднуються. Відношення робочих поверхонь робочих камер вибрані такими: A1: B1: A2: B2 = 2:1:2:1. 28
ДивитисяДодаткова інформація
Назва патенту англійськоюDigital hydraulic system
Автори російськоюSipola, Ari, Vihtanen, Hannu-Pekka, Linjama, Matti, Laamanen, Arto
МПК / Мітки
МПК: F15B 11/17, F15B 11/02, F15B 11/042
Мітки: спосіб, система, середовищем, застосування, варіанти, тиском, гідравлічна
Код посилання
<a href="https://ua.patents.su/50-103207-gidravlichna-sistema-iz-seredovishhem-pid-tiskom-varianti-ta-sposib-zastosuvannya.html" target="_blank" rel="follow" title="База патентів України">Гідравлічна система із середовищем під тиском (варіанти) та спосіб її застосування</a>
Спосіб і система для обробки природного газу, зріджений природний газ під тиском і резервуар (варіанти) для нього та спосіб (варіанти) і система (варіанти) для транспортування зрідженого природного газу під тиском
Номер патенту: 53717
Опубліковано: 17.02.2003
Автори: Фейрчілд Дуглас П., Бовен Роналд Р., Вудалл Роберт М.
МПК: C22C 38/08, F25B 19/00, F25D 23/00
Мітки: газу, система, зрідженого, резервуар, зріджений, тиском, варіанти, спосіб, транспортування, нього, обробки, природного, природній, газ
Формула / Реферат:
1. Резервуар для збереження зрідженого природного газу під тиском, приблизно, від 1035 кПа (150 фн-с /кв. д абс) до 7590 кПа (1100 фн-с /кв. д абс) і при температурі, приблизно, від -123°С (-190°F) до -62°С (-80°F), який відрізняється тим, що резервуар виготовлений з'єднанням сукупності окремих листів матеріалів, що містять в собі надміцну низьколеговану сталь, ваговий вміст нікелю в якій складає менше 9%, що має межу міцності на...
Циліндр із середовищем під тиском з підсиленням тиску

Номер патенту: 84088
Опубліковано: 10.09.2008
Автор: Лангедер Рудольф
МПК: B21B 31/16, F15B 11/00, B21B 37/58
Мітки: циліндр, тиском, середовищем, тиску, підсиленням
Формула / Реферат:
1. Циліндр із середовищем під тиском з підсиленням тиску, переважно гідравлічний або пневматичний циліндр, причому циліндр 1 із середовищем під тиском містить два циліндри 5, 8, які відокремлені один від одного і в кожному з яких знаходиться поршень 3, 6, причому поршень 3 першого циліндра 5 має шток 4 поршня, який операційно з'єднаний з другим циліндром 8 для підвищення тиску, причому циліндри 5, 8 виконані з можливістю приводитися в дію...
Пристрій та система для економії палива, паливна система (варіанти) і система для зменшення викидів для застосування пристроя
Номер патенту: 74187
Опубліковано: 15.11.2005
Автор: Мюллер Джеффрі Алан
МПК: F02M 27/00
Мітки: викидів, зменшення, пристроя, застосування, система, економії, пристрій, паливна, палива, варіанти
Формула / Реферат:
1. Пристрій для економії палива, що включає немагнітний корпус, у якому виконаний отвір, що має повздовжню розмірність і радіальну розмірність, та визначає протік повітря/паливо, де повздовжня розмірність отвору співвісна з напрямком потоку в середовищі повітря/паливо, та принаймні три магніти, який відрізняється тим, що кожний магніт має полярну вісь, орієнтовану головним чином паралельно напрямку потоку, причому принаймні два з магнітів...
Система з регульованим середовищем і спосіб швидкого розведення насіннєвої картоплі
Номер патенту: 94440
Опубліковано: 10.05.2011
Автор: Була Реймонд Дж.
МПК: A01G 1/00, A01G 31/00
Мітки: спосіб, система, розведення, середовищем, швидкого, регульованим, насіннєвої, картоплі
Формула / Реферат:
1. Система вирощування рослин картоплі для отримання міні-бульб, що містить щонайменше одну камеру з автоматичним регульованим середовищем для утримання і підтримання зростання рослин картоплі протягом усього життєвого циклу, що містить датчик температури, вологості і освітлення, засіб освітлення для забезпечення світлових і темних періодів експозиції, що містить декілька флуоресцентних ламп, розташованих вище рослин картоплі і відділених від...
Німесулідна гелева система для місцевого застосування і спосіб її отримання (варіанти)
Номер патенту: 50807
Опубліковано: 15.11.2002
Автори: Монті Тіціана, Бадер Стефано, Ейсерманн Енріке
МПК: A61K 47/10, A61K 47/06, A61K 31/63, A61K 47/00, A61K 31/18, A61K 47/32
Мітки: варіанти, місцевого, спосіб, отримання, система, застосування, гелева, німесулідна
Формула / Реферат:
1. Німесулідна композиція для місцевого застосування в формі гелевої системи, яка включає карбоксивініловий полімер, нейтралізований водними розчинами слабких основ або поліакриламід-ізопарафіну і розчинник, вибраний з групи, що включає етанол, ізопропанол, моноетиловий етер діетанолгліколю і має вміст води в діапазоні 40-95% за масою.2. Композиція згідно з п. 1, в якій етанол і ізопропанол використовують у концентрації від 5% до 20%...