Стабілізатор танкової гармати
Номер патенту: 107924
Опубліковано: 24.06.2016
Автори: Александрова Тетяна Євгенівна, Лазаренко Артем Олександрович

Формула / Реферат
Стабілізатор танкової гармати, який містить пульт наведення, гіроскопічні датчики осі каналу ствола танкової гармати у вертикальній і горизонтальній площинах відносно лінії прицілювання, причому потенціометри пульта наведення електрично з'єднані з обмотками електромагнітів наведення гіроскопічних датчиків відхилення, гіроскопічні датчики кутової швидкості обертання танкової гармати відносно осі цапф у вертикальній площині і танкової башти з гарматою у горизонтальній площині, датчик лінійних прискорень танкової башти відносно її поперечної осі інерції, датчики тиску робочої рідини в порожнинах виконавчого гідроциліндра канала вертикального наведення, цифровий електронний блок, входи якого електрично з'єднані з виходами перелічених датчиків і який містить випростовувачі вхідних сигналів, перетворювач «аналог-код», входи якого електрично з'єднані з виходами випростовувачів вхідних сигналів електронного блока, а виходи перетворювача електрично з'єднані із входами обчислювального пристрою, що входить до складу цифрового електронного блока, і містить цифрові низькочастотні фільтри Баттеруорта вхідних сигналів обчислювального пристрою і блок суматорів, причому виходи блока суматорів електрично з'єднані із входами перетворювача «код-аналог», а виходи перетворювача «код-аналог» електрично з'єднані з виконавчим органом стабілізатора танкової гармати каналу вертикального наведення і з виконавчим органом стабілізатора танкової башти каналу горизонтального наведення, який відрізняється тим, що до складу електронного блока стабілізатора введено два цифрових низькочастотних фільтрів Ланцоша, входи яких з'єднані з виходами фільтрів Баттеруорта, що відповідають вихідним сигналам датчиків кутових швидкостей обертання танкової гармати і танкової башти, а виходи з'єднані із входами блока суматорів.
Текст
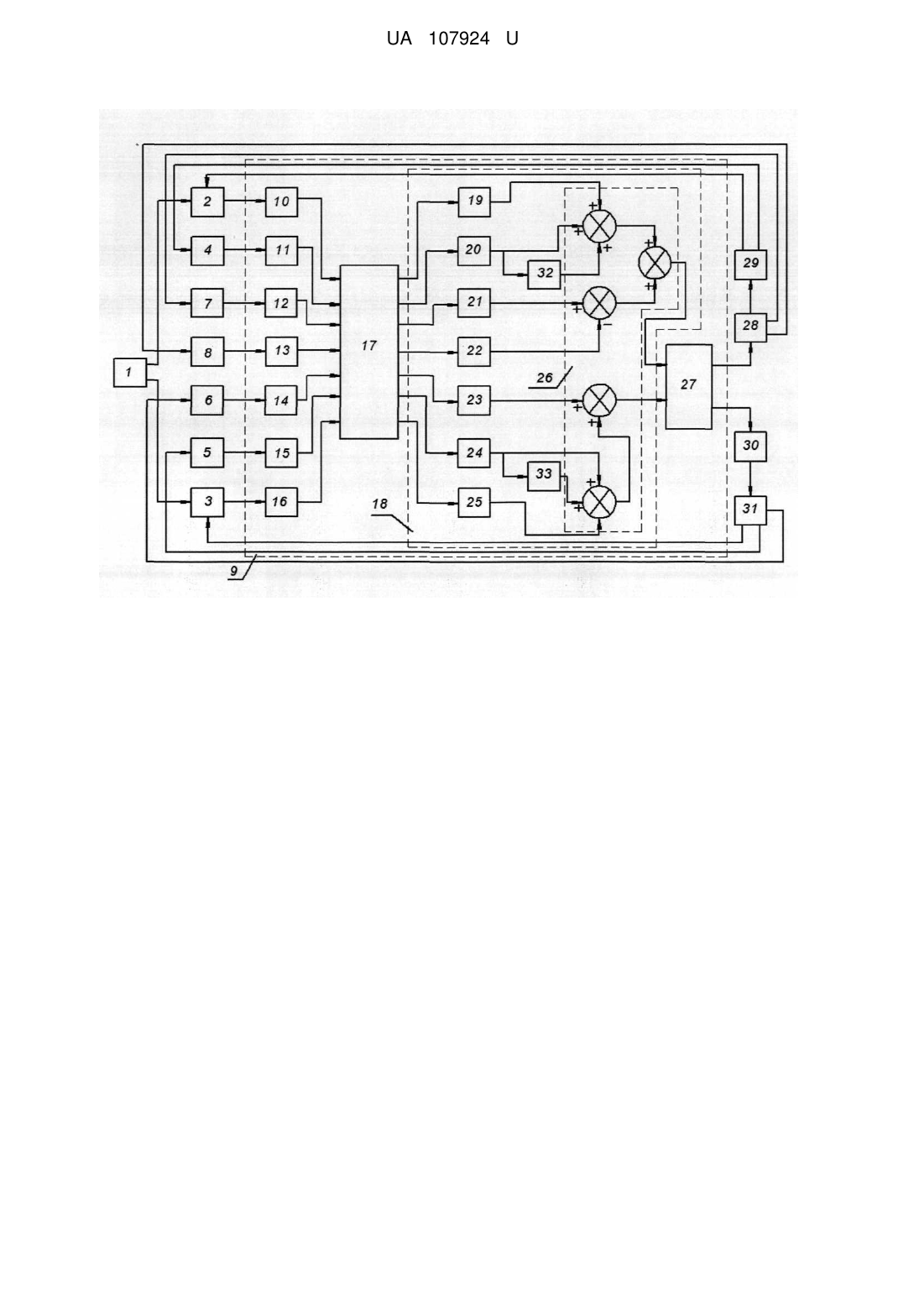
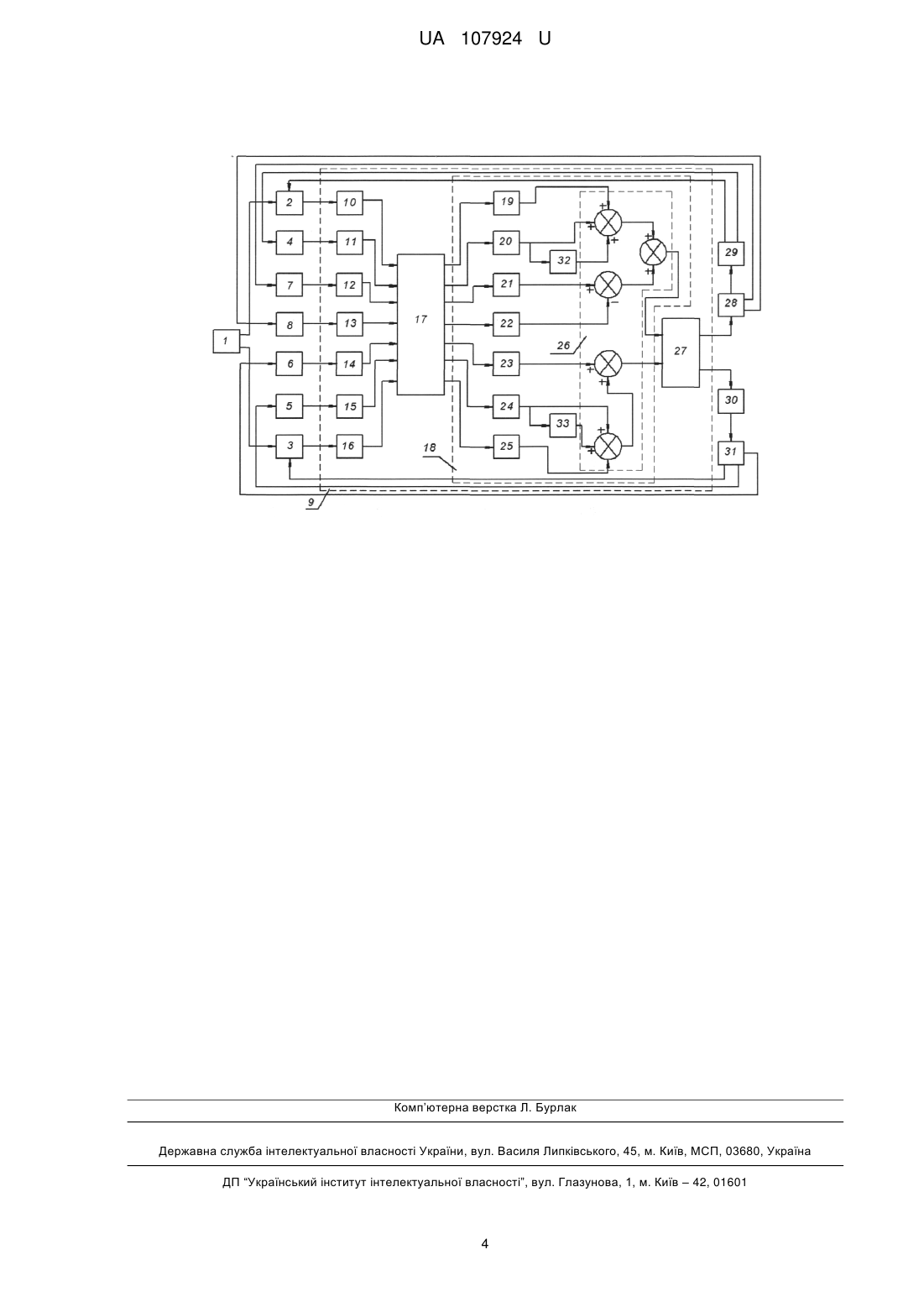
Реферат: UA 107924 U UA 107924 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до галузі танкобудування і може бути використана в системах керування вогнем танків. Відомі стабілізатори танкової гармати, що містять пульт наведення, гіроскопічні датчики відхилення осі каналу ствола танкової гармати у вертикальній і горизонтальній площинах відносно лінії прицілювання, причому потенціометри пульта наведення електрично з'єднані з обмотками електромагнітів наведення гіроскопічних датчиків відхилення, гіроскопічні датчики кутової швидкості обертання танкової гармати відносно осі цапф у вертикальній площині і танкової башти з гарматою у горизонтальній площині, датчик лінійних прискорень танкової башти відносно її поперечної осі інерції, електронний блок, входи якого електрично з'єднані з виходами перелічених датчиків, а виходи електрично з'єднані з виконавчими органами каналів вертикального і горизонтального наведення [1]. Такий стабілізатор застосований на вітчизняних танках Т-64 Б "Булат", Т-80 УД "Береза" і Т-84 "Оплот". В каналі горизонтального наведення цей стабілізатор отримав властивість інваріантності до дії зовнішніх збурень, що діють на танкову башту при повороті танка внаслідок дії відцентрових сил. Дійсно, центр мас башти з гарматою не співпадає з віссю обертання башти. Внаслідок дії відцентрових сил, які виникають при повороті танка, до танкової башти прикладається збурюючий момент 3 t mбht t cos t mбhat cos t , де mб - маса башти з гарматою; h - відстань у горизонтальній площині між центром мас башти з гарматою і центром обертання башти; t - поточна швидкість танка; t - поточний кут повороту танка; a(t) - лінійне прискорення башти відносно її поперечної осі інерції; β(t) - кут повороту подовжньої осі башти відносно власної подовжньої осі танка. Закони стабілізації танкової гармати в каналах вертикального і горизонтального наведення відповідно записується у вигляді U t k Uгв t k Uсв t ; (1) U t k Uгг t k Ucг t k aUa t ; (2) U t U t де , - вихідні сигнали керування, що формуються електронним блоком стабілізатора; Uгв(t), Uгг(t) - випростані електронним блоком вихідні сигнали гіроскопічних датчиків кутів каналів вертикального і горизонтального наведення; Uсв(t), Uсг(t) - випростані електронним блоком вихідні сигнали гіроскопічних датчиків кутових швидкостей каналів вертикального і горизонтального наведення; Ua(t) - випростаний електронним блоком вихідний k ,k ,k ,k ,k сигнал датчика лінійних прискорень башти відносно власної поперечної осі; kφ, варійовані параметри стабілізатора танкової гармати. Зростаючі вимоги до підвищення точності стабілізації осі каналу ствола танкової гармати відносно напрямку на ціль привели до використання цифрових стабілізаторів танкової гармати, здатних реалізувати складні алгоритми стабілізації, такі, що використовують цифрові низькочастотні фільтри, які ефективно фільтрують високочастотні завади сигналів, що вимірюються. Для цього до складу цифрового електронного блока вводять перетворювач "аналог-код", цифрові низькочастотні фільтри Баттеруорта і перетворювач "код-аналог" [2]. Алгоритми стабілізації танкової гармати в цьому випадку записуються у вигляді U n, n t n 1; U t U n 1, n 1 t n 2; (3) U n, n t n 1; U t U n 1, n 1 t n 2; (4) ~ ~ UnT kUгв nT kUсвnT; (5) ~ ~ ~ U nT kUгг nT kUсг nT kaUa n; (6) ~ ~ ~ ~ ~ де Uгв nT , Uсв nT , Uгг nT , Uсг nT , Ua n - відфільтровані фільтрами Баттеруорта вихідні U nT U nT цифрові сигнали перетворювача "аналог-код"; , - вхідні цифрові сигнали перетворювача "код-аналог"; Uφ(t), Uψ(t) - вихідні аналогові сигнали перетворювача "коданалог". 1 UA 107924 U 5 10 15 ~ U n Вихідні цифрові сигнали фільтрів Баттеруорта пов'язані з їх вхідними сигналами U[nT] співвідношенням ~ ~ ~ U n a1 nT 2Un 1 Un 2 d1Un 1 d2Un 2. U (7) Співвідношення (4) представляє собою алгоритм, що реалізується фільтром Баттеруорта. Аналоговий стабілізатор із законом стабілізації (1), (2) і цифровий стабілізатор із алгоритмами стабілізації (3) - (7) забезпечують інваріантність системи стабілізації до дії зовнішніх збурень лише у каналі горизонтального наведення. Поруч з цим, коли кут повороту 2 збурюючий момент від дії відцентрових сил, башти відносно корпусу танка складає близько що прикладається до танкової башти, зменшується до нуля, а момент від дії відцентрових сил, що прикладається до танкової гармати, підвищується до максимуму. Тому доцільно будувати стабілізатор танкового озброєння таким чином, щоб властивість інваріантності до дії зовнішніх збурень забезпечувалася б, як в каналі горизонтального наведення, так і в каналі вертикального наведення. Такий стабілізатор, який вибраний як найближчий аналог до корисної моделі, що заявляється, описано в роботі [3]. До складу прототипу введені датчики тиску робочої рідини в порожнинах виконавчого гідроциліндра каналу вертикального наведення, виходи яких електрично з'єднані із входами електронного блока стабілізатора, що формує цифрові сигнали керування у вигляді ~ ~ ~ ~ UnT kUгв nT kUсвnT kp Up1n Up2n ; (8) ~ ~ ~ U nT kUгг nT kUсг nT kaUa n; (9) ~ ~ U n,Up2 n де p1 - відфільтровані фільтрами Баттеруорта цифрові сигнали Up1[nT] і Up2[nT] на виходах перетворювача "аналог-код", які відповідають випростаним вихідним сигналам Up1(t) і Up2(t) датчиків тиску робочої рідини у верхній і нижній порожнинах виконавчого гідроциліндра; кр - варійований параметр стабілізатора. Але відомо [4], що підвищення ступеня інваріантності системи автоматичного керування до дії зовнішніх збурень одночасно приводить до зниження запасу стійкості системи і може привести навіть до втрати системою роботоспроможності. Для запобігання цього рекомендовано введення в систему ще одного контуру керування, а саме додаткового зворотного зв'язку по похідній від регульованої величини. В основу корисної моделі поставлена задача підвищення ступеня інваріантності системи наведення і стабілізації танкової гармати до дії зовнішніх збурень без втрати системою запасу стійкості, що приводить до підвищення точності стабілізації осі каналу ствола танкової гармати відносно напрямку на ціль. Поставлена задача вирішується тим, що до складу електронного блока стабілізатора введено два цифрових низькочастотних фільтри Ланцоша, входи яких з'єднані з виходами фільтрів Баттеруорта, що відповідають вихідним сигналам датчиків кутових швидкостей обертання танкової гармати і танкової башти, а виходи з'єднані із входами блока суматорів. Структурно-логічна схема стабілізатора танкової гармати приведена на кресленні, де прийняті наступні позначення: 1 - пульт наведення; 2 - гіроскопічний датчик відхилення осі каналу ствола танкової гармати відносно лінії прицілювання у вертикальній площині; 3 гіроскопічний датчик відхилення осі каналу ствола танкової гармати відносно лінії прицілювання у горизонтальній площині; 4 - гіроскопічний датчик кутової швидкості обертання танкової гармати відносно осі цапф у вертикальній площині; 5 - гіроскопічний датчик кутової швидкості обертання танкової башти з гарматою у горизонтальній площині; 6 - датчик лінійних прискорень танкової башти відносно її поперечної осі інерції; 7, 8 - датчики тиску робочої рідини в порожнинах виконавчого гідроциліндра каналу вертикального наведення; 9 - цифровий електронний блок, який містить випростовувачі вхідних сигналів 10-16, перетворювач "аналогкод" 17, входи якого електрично з'єднані з виходами випростовувачів 10-16, а виходи перетворювача електрично з'єднані із входами обчислювального пристрою 18, що входить до складу цифрового електронного блока 9; 19-25 - цифрові низькочастотні фільтри Баттеруорта вхідних сигналів обчислювального пристрою 18; 26 - блок суматорів; 27 - перетворювач "коданалог"; 28 - виконавчий орган каналу вертикального наведення; 29 - танкова гармата; 30 виконавчий орган каналу горизонтального наведення; 31 - танкова башта; 32, 33 - цифрові низькочастотні фільтри Ланцоша, входи яких з'єднані з виходами фільтрів Баттеруорта 20 і 24, 20 25 30 35 40 45 50 2 UA 107924 U що відповідають вихідним сигналам датчиків кутових швидкостей обертання танкової гармати 4 і танкової башти 5, а виходи з'єднані із входами блока суматорів 26. Робота пропонованого стабілізатора майже не відрізняється від роботи прототипу. Різниця полягає в тому, що пропонований стабілізатор формує цифрові сигнали керування у вигляді 5 ~ ~ ~ ~ ~ U nT kUгв nT kUсвnT kp Up1n Up2 n k U свn ; (10) ~ ~ ~ ~ U nT k Uгг nT k Uсг nT kaUa n k U сгn; 10 (11) ~ ~ де U свn , U сгn - відфільтровані низькочастотними фільтрами Ланцоша 32 і 33 вихідні сигнали фільтрів Баттеруорта 20 і 24, які відповідають вихіднім сигналам датчиків кутових швидкостей обертання танкової гармати 4 і танкової башти 5. Вихідні цифрові сигнали фільтрів Ланцоша U[nT] пов'язані з їх вхідними сигналами U[nT] співвідношенням 15 20 25 30 ~ ~ ~ ~ ~ U n C0Un C1Un 1 C1Un 3 C0Un 4 , (12) яке представляє собою алгоритм, що реалізується фільтром Ланцоша. Пропонована корисна модель забезпечує підвищену точність стабілізації осі каналу ствола танкової гармати у порівнянні з аналоговими і у порівнянні з прототипом за рахунок введення додаткових контурів керування за додатковою похідною від регульованої величини в каналах вертикального і горизонтального наведення. Джерела інформації: 1. Объект 447А(437А). Техническое описание и инструкция по эксплуатации. Книга вторая. М.: Военное издательство Министерства обороны СССР, 1985. 2: Александрова Т.Е. Сравнительный анализ цифровых ПД-стабилизаторов подвижных объектов с низкочастотными фильтрами Баттеруорта и Ланцоша / Т.Е. Александрова, В.А. Кононенко, А.А. Назаренко, А.В. Зейн // Радіоелектроніка. Інформатика. Управління. - 2011. - № 2. - С. 148-152. 3. Пат. UA 83903 від 10.10.2013, Україна, МПК F41G 5/00. Стабілізатор танкової гармати. / Т.Є. Александрова, А.О. Назаренко; Патентовласник Національний технічний університет "Харківський політехнічний інститут". - № U201300690; заявл. 21.01.2013; опубл. 10.10.2013. Бюл. № 19. - 4с. 4. Бесекерский В.А. Теория систем автоматического управления / В.А. Бесекерский, Е.П. Попов. - СПб.: Профессия, 2003. - 752с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 50 Стабілізатор танкової гармати, який містить пульт наведення, гіроскопічні датчики осі каналу ствола танкової гармати у вертикальній і горизонтальній площинах відносно лінії прицілювання, причому потенціометри пульта наведення електрично з'єднані з обмотками електромагнітів наведення гіроскопічних датчиків відхилення, гіроскопічні датчики кутової швидкості обертання танкової гармати відносно осі цапф у вертикальній площині і танкової башти з гарматою у горизонтальній площині, датчик лінійних прискорень танкової башти відносно її поперечної осі інерції, датчики тиску робочої рідини в порожнинах виконавчого гідроциліндра канала вертикального наведення, цифровий електронний блок, входи якого електрично з'єднані з виходами перелічених датчиків і який містить випростовувачі вхідних сигналів, перетворювач "аналог-код", входи якого електрично з'єднані з виходами випростовувачів вхідних сигналів електронного блока, а виходи перетворювача електрично з'єднані із входами обчислювального пристрою, що входить до складу цифрового електронного блока, і містить цифрові низькочастотні фільтри Баттеруорта вхідних сигналів обчислювального пристрою і блок суматорів, причому виходи блока суматорів електрично з'єднані із входами перетворювача "коданалог", а виходи перетворювача "код-аналог" електрично з'єднані з виконавчим органом стабілізатора танкової гармати каналу вертикального наведення і з виконавчим органом стабілізатора танкової башти каналу горизонтального наведення, який відрізняється тим, що до складу електронного блока стабілізатора введено два цифрових низькочастотних фільтрів Ланцоша, входи яких з'єднані з виходами фільтрів Баттеруорта, що відповідають вихідним сигналам датчиків кутових швидкостей обертання танкової гармати і танкової башти, а виходи з'єднані із входами блока суматорів. 3 UA 107924 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F41G 5/04
Мітки: гармати, стабілізатор, танкової
Код посилання
<a href="https://ua.patents.su/6-107924-stabilizator-tankovo-garmati.html" target="_blank" rel="follow" title="База патентів України">Стабілізатор танкової гармати</a>
Стабілізатор танкової гармати
Номер патенту: 83903
Опубліковано: 10.10.2013
Автори: Лазаренко Артем Олександрович, Александрова Тетяна Євгенівна
МПК: F41G 5/00
Мітки: гармати, танкової, стабілізатор
Формула / Реферат:
Стабілізатор танкової гармати, який містить пульт наведення, гіроскопічні датчики відхилення осі каналу стволу танкової гармати у вертикальній і горизонтальній площинах відносно лінії прицілювання, гіроскопічні датчики кутових швидкостей обертання танкової гармати відносно осі цапф у вертикальній площині і танкової башти з гарматою у горизонтальної площині, датчик лінійних прискорень танкової башти відносної поперечної осі інерції,...
Стабілізатор лінії прицілювання танкової гармати
Номер патенту: 83904
Опубліковано: 10.10.2013
Автори: Александрова Тетяна Євгенівна, Лазаренко Артем Олександрович, Зейн Алі Вахіб
МПК: F41G 3/02
Мітки: танкової, прицілювання, лінії, стабілізатор, гармати
Формула / Реферат:
Стабілізатор лінії прицілювання танкової гармати, який містить гіроскопічну платформу і рухоме дзеркало прицілу, положення якого визначає напрямок лінії прицілювання, а також давачі кутів повороту зовнішньої рамки гіроскопічної платформи і рухомого дзеркала прицілу, виходи яких електрично з'єднані зі входами електронного блока, і виконавчий електродвигун з обмоткою керування, якір якого через механічний редуктор з'єднаний з рухомим дзеркалом...
Система керування заряджаючим механізмом танкової гармати
Номер патенту: 61129
Опубліковано: 17.11.2003
Автори: Мошнін Віктор Миколайович, Петраченко Любов Парфенівна, Царєв Ігор Володимирович, Ганзера Юрій Іванович
Мітки: заряджаючим, механізмом, гармати, керування, танкової, система
Формула / Реферат:
1. Система керування заряджаючим механізмом танкової гармати, що містить блок дозволу пострілу балістичного обчислювача, блок керування заряджанням прицілу навідника, блок керування стрільбою прицілу навідника, з'єднаний першим входом з першим виходом блока керування заряджанням прицілу навідника, електроприводи автомата заряджання, підключені до першого виходу коробки розподільної автомата заряджання, коробку пуску стрільби з гармати, яка...
Стабілізатор основного озброєння танка
Номер патенту: 81491
Опубліковано: 25.06.2013
Автор: Александрова Тетяна Євгенівна
МПК: F41G 5/00
Мітки: стабілізатор, основного, озброєння, танка
Формула / Реферат:
Стабілізатор основного озброєння танка, який містить гіроскопічний датчик кута відхилення осі каналу ствола танкової гармати від лінії прицілювання і гіроскопічний датчик кутової швидкості танкової гармати відносно осі цапф, електронний блок, що містить випростувачі вихідних сигналів гіроскопічних датчиків кута і кутової швидкості, підсилювачі випростаних сигналів і суматор, а також електрогідравлічний підсилювач, причому виходи...
Стабілізатор вертикального наведення безпечної стрільби бойової машини піхоти
Номер патенту: 27286
Опубліковано: 25.10.2007
Автор: Ковч Владислав Юрійович
МПК: F41A 17/00
Мітки: наведення, вертикального, піхоти, стрільби, стабілізатор, бойової, безпечної, машини
Формула / Реферат:
Стабілізатор вертикального наведення безпечної стрільби бойової машини піхоти, який містить привід вертикального наведення, який розташований у башті, кінцевий вимикач обмеження підвищення спареної установки та кронштейн упора обмеження підвищення спареної установки, який відрізняється тим, що додатково містить регулювальну планку, кутомірну шкалу, регулювальні болти, при цьому кутомірна шкала з регулювальною планкою закріплена до кронштейна...
Попередній патент: Спосіб охолодження головного мозку людини
Випадковий патент: Спосіб виробництва крупи з пшениці спельти № 1 і подрібнених із пшениці спельти № 1, 2, 3