Система автоматичного керування швидкістю руху підводного апарата на базі інверсної моделі з онлайн-ідентифікацією параметрів
Формула / Реферат
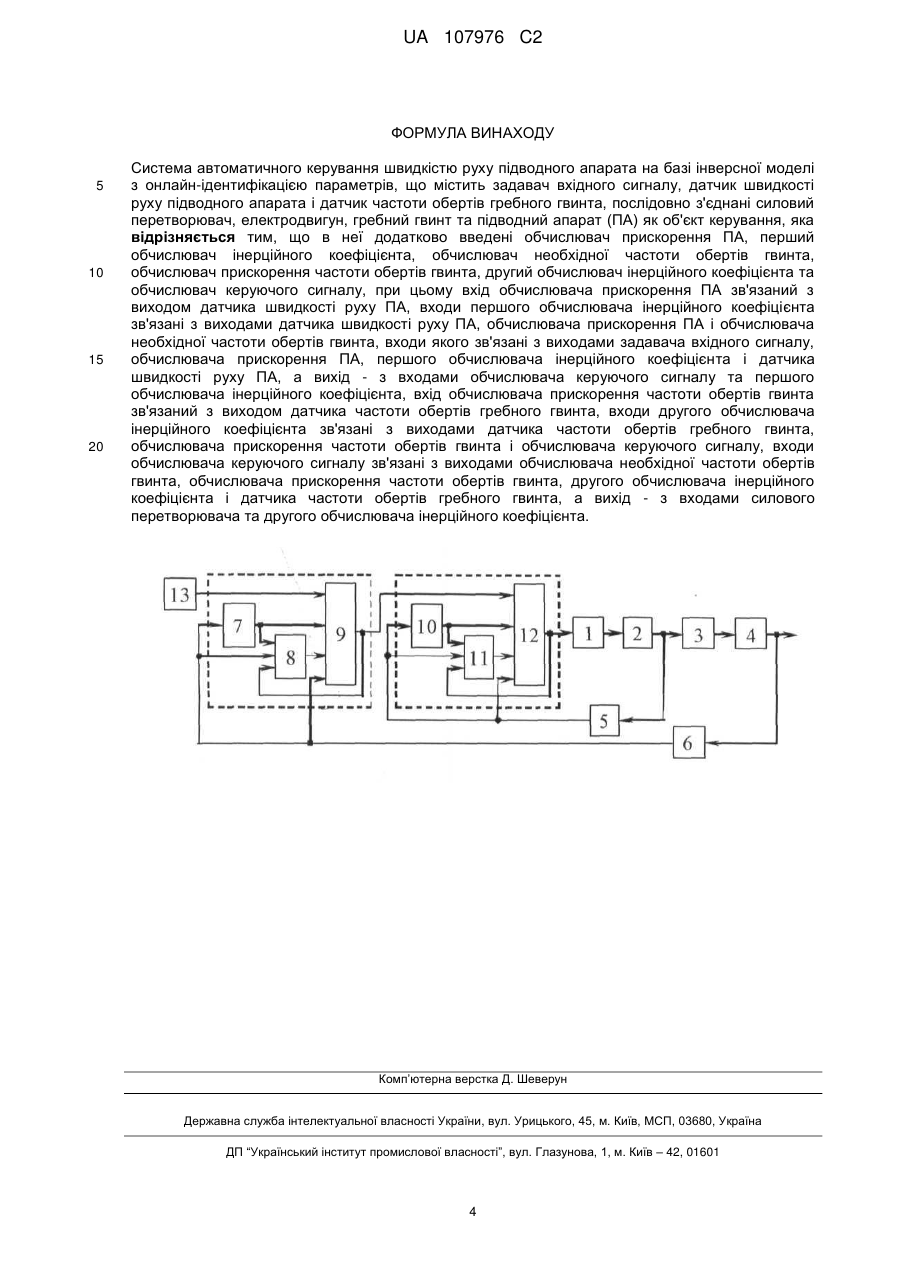
Система автоматичного керування швидкістю руху підводного апарата на базі інверсної моделі з онлайн-ідентифікацією параметрів, що містить задавач вхідного сигналу, датчик швидкості руху підводного апарата і датчик частоти обертів гребного гвинта, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт та підводний апарат (ПА) як об'єкт керування, яка відрізняється тим, що в неї додатково введені обчислювач прискорення ПА, перший обчислювач інерційного коефіцієнта, обчислювач необхідної частоти обертів гвинта, обчислювач прискорення частоти обертів гвинта, другий обчислювач інерційного коефіцієнта та обчислювач керуючого сигналу, при цьому вхід обчислювача прискорення ПА зв'язаний з виходом датчика швидкості руху ПА, входи першого обчислювача інерційного коефіцієнта зв'язані з виходами датчика швидкості руху ПА, обчислювача прискорення ПА і обчислювача необхідної частоти обертів гвинта, входи якого зв'язані з виходами задавача вхідного сигналу, обчислювача прискорення ПА, першого обчислювача інерційного коефіцієнта і датчика швидкості руху ПА, а вихід - з входами обчислювача керуючого сигналу та першого обчислювача інерційного коефіцієнта, вхід обчислювача прискорення частоти обертів гвинта зв'язаний з виходом датчика частоти обертів гребного гвинта, входи другого обчислювача інерційного коефіцієнта зв'язані з виходами датчика частоти обертів гребного гвинта, обчислювача прискорення частоти обертів гвинта і обчислювача керуючого сигналу, входи обчислювача керуючого сигналу зв'язані з виходами обчислювача необхідної частоти обертів гвинта, обчислювача прискорення частоти обертів гвинта, другого обчислювача інерційного коефіцієнта і датчика частоти обертів гребного гвинта, а вихід - з входами силового перетворювача та другого обчислювача інерційного коефіцієнта.
Текст
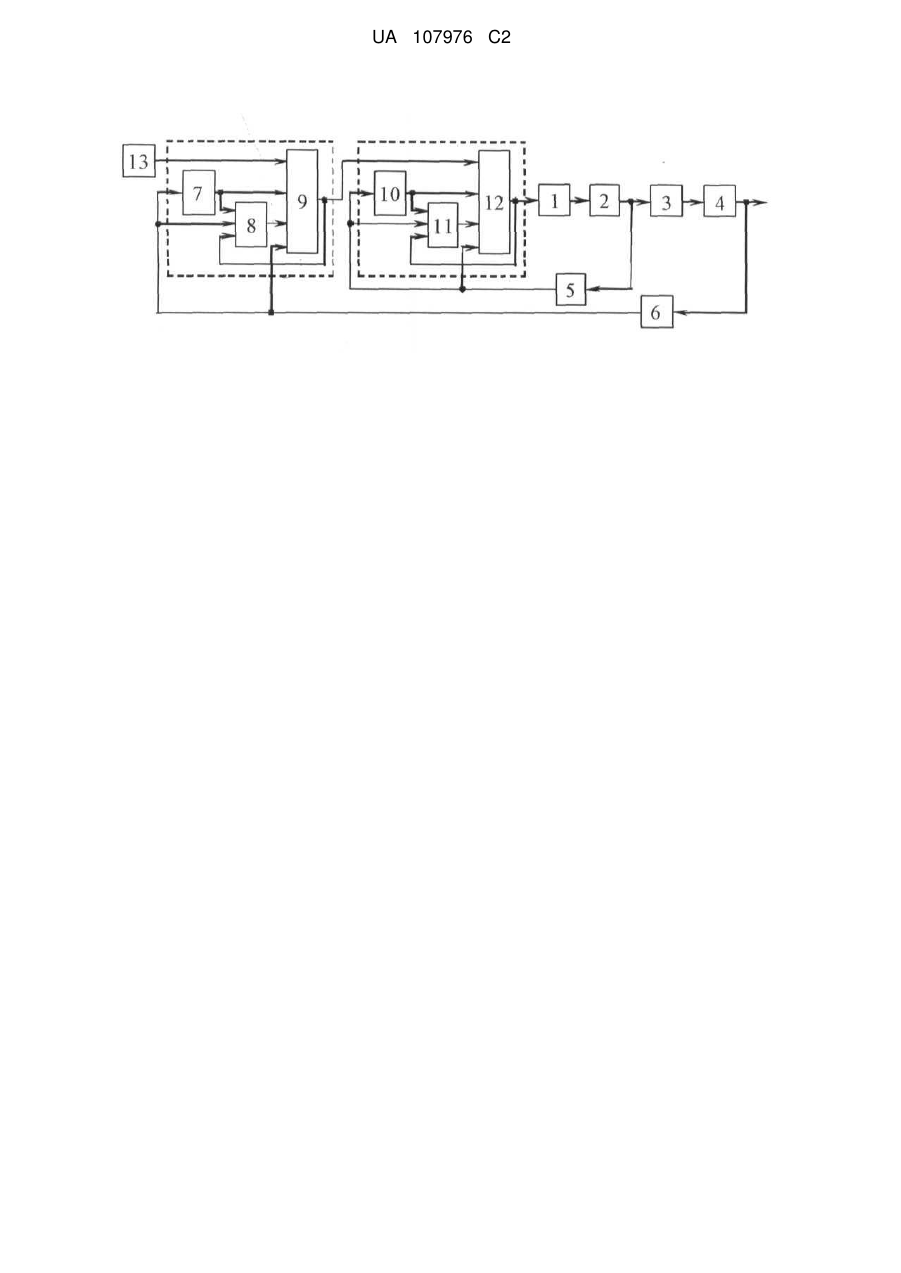
Реферат: Винахід належить до галузі суднобудування і може бути використаний на підводних апаратах (ПА). Система автоматичного керування швидкістю руху підводного апарата на базі інверсної моделі з онлайн-ідентифікацією параметрів містить задавач вхідного сигналу, датчики швидкості руху ПА і частоти обертів гребного гвинта, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт та ПА як об'єкт керування. Згідно з винаходом, в неї додатково введені обчислювач прискорення ПА, перший обчислювач інерційного коефіцієнта, обчислювач необхідної частоти обертів гвинта, обчислювач прискорення частоти обертів гвинта, другий обчислювач інерційного коефіцієнта та обчислювач керуючого сигналу. При цьому обчислювач прискорення ПА зв'язаний з датчиком швидкості руху ПА. Перший обчислювач інерційного коефіцієнта зв'язаний з датчиком швидкості руху ПА, обчислювачем прискорення ПА і обчислювачем необхідної частоти обертів гвинта, який зв'язаний з задавачем вхідного сигналу, обчислювачем прискорення ПА, першим обчислювачем інерційного коефіцієнта, датчиком швидкості руху ПА та з обчислювачем керуючого сигналу. Обчислювач прискорення частоти обертів зв'язаний з датчиком частоти обертів гребного гвинта. Другий обчислювач інерційного коефіцієнта зв'язаний з датчиком частоти обертів гребного гвинта, обчислювачем прискорення частоти обертів гвинта і обчислювачем керуючого сигналу, який зв'язаний з обчислювачем необхідної частоти обертів гвинта, обчислювачем прискорення частоти обертів, другим обчислювачем інерційного коефіцієнта, датчиком частоти обертів гребного гвинта та з силовим перетворювачем. Система забезпечує підвищення точності керування та спрощення системи. UA 107976 C2 (12) UA 107976 C2 UA 107976 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до галузі суднобудування і може бути застосований на підводних апаратах (ПА), які використовують як рушій для переміщення по деякій осі координат (горизонтальний, вертикальний або лаговий рух) гребний гвинт з електричним приводом, та до яких висуваються вимоги високої точності керування швидкістю руху в умовах невизначеності параметрів ПА та зовнішніх збурень. Відомо про систему автоматичного керування глибиною підводного апарата (Блінцов С.В. Деклараційний патент на корисну модель UA № 4782 U, опубл. 15.02.2005, бюл. № 2). Система керування містить: програмний пристрій, датчики глибини (висоти над ґрунтом) та вертикальної швидкості, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, підводний апарат як об'єкт керування, а також суматор, зв'язаний з датчиком глибини (висоти над ґрунтом) та програмним пристроєм, апроксиматор залежності гальмівного шляху підводного апарата від його вертикальної швидкості, зв'язаний з датчиком вертикальної швидкості, та обчислювач, входи якого зв'язані з суматором, апроксиматором і датчиком вертикальної швидкості, а вихід з силовим перетворювачем. Така система керування може бути синтезована в умовах невизначеності параметрів математичної моделі ПА, але вона призначена для ступінчатої зміни глибини занурення ПА і не підходить для керування швидкістю руху ПА, оскільки спосіб обчислення керуючого впливу принципово не дозволяє пристосувати його для випадку керування швидкістю. Найбільш близьким аналогом є адаптивна система із змінною структурою для керування швидкістю руху підводного робота (Юхимец Д.А., Филаретов В.Φ., патент RU 2215318, опубл. 27.10.2003). Такий пристрій містить послідовно з'єднані перший блок множення, перший суматор, перший релейний елемент, фільтр, блок виділення модуля, вимірник неузгодженості, ключ, другий вхід якого через другий релейний елемент приєднаний до виходу першого блока виділення модуля, інтегратор, другий суматор, другий вхід якого з'єднаний з виходом джерела еталонного сигналу й другим входом першого вимірника неузгодженості, а його вихід з'єднаний з першим входом першого блока множення, послідовно з'єднані третій суматор, перший вхід якого з'єднаний із входом системи, другий блок виділення модуля, другий блок множення, другий вхід якого з'єднаний з виходом першого релейного елемента, і четвертий суматор, а також датчик прискорення руху підводного робота, установлений на корпусі підводного робота, що підключений до другого входу першого суматора, причому другий вхід першого блока множення з'єднаний із входом другого блока виділення модуля, послідовно з'єднані третій блок виділення модуля, третій блок множення, п'ятий суматор, другий вхід якого підключений до виходу датчика швидкості руху підводного робота, установленого на корпусі підводного робота, входу третього блока виділення модуля і другого входу третього суматора, шостий суматор, другий вхід якого з'єднаний з виходом четвертого блока множення, п'ятий блок множення, сьомий суматор, підсилювач, двигун і гвинт, жорстко пов'язаний з валом двигуна, а також послідовно з'єднані датчик швидкості обертання вала двигуна, установлений на цьому валу, четвертий блок виділення модуля, восьмий суматор, шостий блок множення, дев'ятий суматор, перший нелінійний елемент, другий нелінійний елемент, вхід якого підключений до другого входу четвертого блока множення, перший блок ділення, другий вхід якого з'єднаний з виходом десятого суматора, перший вхід якого підключений до виходу п'ятого суматора й через квадратор - до другого входу дев'ятого суматора, сьомий блок множення, другий вхід якого з'єднаний з виходом четвертого блока виділення модуля, другим входом п'ятого блока множення й першим входом восьмого блока множення, вихід якого підключений до другого входу сьомого суматора, одинадцятий суматор, другий вхід якого з'єднаний з виходом шостого суматора, а третій вхід - із третім входом шостого суматора, другим входом десятого суматора, другим входом восьмого блока множення й виходом восьмого суматора, дев'ятий блок множення, другий вхід якого підключений до другого входу четвертого блока множення, другого входу третього блока множення й через третій релейний елемент - до виходу датчика швидкості обертання вала двигуна, третього входу сьомого суматора, четвертого входу одинадцятого суматора, другого входу восьмого суматора, другого входу шостого блока множення й третього входу п'ятого суматора, третій нелінійний елемент, другий блок розподілу, вихід якого з'єднаний із четвертим входом сьомого суматора, а другий вхід - з виходом дванадцятого суматора, перший вхід якого підключений до виходу четвертого суматора, а другий вхід - до виходу п'ятого блока множення й другого входу четвертого суматора. У вказаній системі керування визначення керуючого сигналу проводиться на основі математичної моделі об'єкта з урахуванням нелінійностей. Основною проблемою є висока складність синтезу системи керування і визначення її коефіцієнтів, а також параметрів моделі, що унеможливлює синтез такої системи керування в умовах невизначеності цих параметрів. 1 UA 107976 C2 5 10 15 20 25 30 35 40 45 Ставиться задача удосконалення системи автоматичного керування частотою обертів гребного гвинта шляхом додаткового введення елементів обчислення керуючого впливу на електродвигун гребного гвинта для підвищення точності системи, що приводить до спрощення системи керування, можливості її синтезу в умовах невизначеності параметрів математичної моделі ПА, підвищення якості керування швидкістю руху ПА. Поставлена задача вирішується тим, що в системі автоматичного керування швидкістю руху, яка містить задавач вхідного сигналу, датчики швидкості руху і частоти обертів гребного гвинта, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також ПА як об'єкт керування, згідно з винаходом, додатково введено обчислювач прискорення ПА, зв'язаний з датчиком швидкості руху ПА, перший обчислювач інерційного коефіцієнта, зв'язаний з датчиком швидкості, обчислювачем прискорення ПА і обчислювачем необхідної частоти обертів гвинта, обчислювач необхідної частоти обертів гвинта, входи якого зв'язані з задавачем вхідного сигналу, обчислювачем прискорення ПА, першим обчислювачем інерційного коефіцієнта і датчиком швидкості, а вихід - з обчислювачем керуючого сигналу та першим обчислювачем інерційного коефіцієнта, обчислювач прискорення частоти обертів, зв'язаний з датчиком частоти обертів гребного гвинта, другий обчислювач інерційного коефіцієнта, зв'язаний з датчиком частоти обертів гребного гвинта, обчислювачем прискорення частоти обертів і обчислювачем керуючого сигналу, та обчислювач керуючого сигналу, входи якого зв'язані з обчислювачем необхідної частоти обертів гвинта, обчислювачем прискорення частоти обертів, другим обчислювачем інерційного коефіцієнта і датчиком частоти обертів гребного гвинта, а вихід - з силовим перетворювачем та другим обчислювачем інерційного коефіцієнта. Суть пропозиції полягає в наступному. Об'єкт керування розглядається як об'єкт другого порядку: k11ω'=u-k12ω+D1 k21V'=ω-k22V+D2, де u - керуючий вплив; ω - частота обертів гребного гвинта; ω'=dω/dt - перша похідна по часу t від ω; D1 D2 - зовнішні збурення; k1i=f(u, ω, ω', t), k2j=f(ω, V, V', t) - нелінійні, нестаціонарні (в загальному випадку) коефіцієнти об'єкта керування; V - керована величина (швидкість руху ПА); V'=dV/dt - прискорення руху ПА. Автоматичне керування виконується на основі інверсної моделі об'єкта за законом ωd=k21Vd'+k22V-D2, u=k11ωd'+k12ω-D1, де Vd'=(Vd-V)/Δt - бажане (desired) значення прискорення руху ПА; Vd - задане значення швидкості руху ПА; Δt - постійна часу системи керування (заданий проміжок часу, за який керована величина V має прийняти задане значення Vd); ωd'=(ωd-ω)/Δt - бажане значення першої похідної частоти обертів гребного гвинта; ωd - необхідне значення частоти обертів гребного гвинта. Для визначення коефіцієнта k11 необхідно мати значення величин u і ω' в двох точках при ω=const. Тоді він визначається за формулою k11=Δu/Δω' (1) де Δu=(u2-u1) - різниця між керуючим сигналом в двох вказаних точках, Δω'=(ω2'-ω1') - різниця між прискоренням частоти обертів гребного гвинта. В припущенні, що ω≈const, k12≈const та D1≈const на двох сусідніх точках (ця умова виконується, якщо крок дискретизації Δt значно менший за постійну часу динаміки системи і динаміку зміни збурень) можна отримати формулу для розрахунку керуючого сигналу un, який має подаватись на наступному кроці дискретизації щоб наприкінці кроку отримати задану частоту обертів гребного гвинта ωd: un u k11 d ' . t 50 По аналогії, для другого регулятора, який розраховує необхідне значення частоти обертів гребного гвинта ωd, що має бути на наступному кроці дискретизації для забезпечення наприкінці кроку заданої швидкості, будемо мати: V V d k 21 d V' . t 55 (2) (3) Структурна схема пропонованої системи показана на кресленні. Система автоматичного керування швидкістю руху підводного апарата на базі інверсної моделі з онлайн-ідентифікацією параметрів містить: послідовно з'єднані силовий перетворювач 1, виходом якого є напруга живлення U електродвигуна 2, електродвигун 2, який забезпечує кутову частоту обертів ω рушія 3, рушій 3 по даній осі координат - гребний гвинт, підводний 2 UA 107976 C2 5 10 15 20 25 30 35 40 45 50 55 апарат 4 як об'єкт керування; датчик 5 частоти обертів гребного гвинта 3, приєднаний до вала електродвигуна 2; датчик 6 швидкості руху ПА по даній осі координат, зв'язаний з підводним апаратом 4; обчислювач прискорення ПА 7, вхід якого зв'язаний з датчиком 6, та який на основі поточного і попереднього (або декількох попередніх) значень швидкості розраховує прискорення руху ПА; перший обчислювач інерційного коефіцієнта 8, що розраховує коефіцієнт k21 і зв'язаний входами з датчиком 6, обчислювачем прискорення 7 і обчислювачем необхідної частоти обертів гвинта 9; обчислювач необхідної частоти обертів гвинта 9, входи якого зв'язані з задавачем вхідного сигналу 13, обчислювачем прискорення 7, першим обчислювачем інерційного коефіцієнта 8 і датчиком швидкості 6, а вихід - з обчислювачем керуючого сигналу 12 та першим обчислювачем інерційного коефіцієнта 8; обчислювач прискорення частоти обертів гвинта 10, вхід якого зв'язаний з датчиком 5, та який на основі поточного і попереднього (або декількох попередніх) значень частоти обертів розраховує її похідну; другий обчислювач інерційного коефіцієнта 11, що розраховує коефіцієнт k11 і зв'язаний входами з датчиком 5, обчислювачем прискорення 10 і обчислювачем керуючого сигналу 12; обчислювач керуючого сигналу 12, входи якого зв'язані з обчислювачем частоти обертів 9, обчислювачем прискорення 10, другим обчислювачем інерційного коефіцієнта 11 і датчиком частоти обертів 5, а вихід - з силовим перетворювачем 1 та обчислювачем 11; задавач вхідного сигналу 13, вихід якого зв'язаний з обчислювачем необхідної частоти обертів гвинта 9 і який задає значення швидкості руху ПА згідно з програмою руху. На кресленні пунктиром відокремлено два регулятори - швидкості руху ПА (блоки 7-9) та частоти обертів гребного гвинта (блоки 10-12), які реалізують закони (3) і (2), відповідно, та в сукупності утворюють систему керування швидкістю руху ПА. Обчислювачі 7-12 можуть бути реалізовані програмно на базі ЕОМ або загально відомих мікроконтролерів (Motorola, Intel, PICконтролери), причому як у вигляді окремих елементів, так і на одному мікро-контролері у вигляді окремих підпрограм. Пропонована система працює наступним чином. Спочатку проводиться ідентифікація параметра k11. Для цього обчислювач 12 протягом декількох кроків дискретизації подає мінімальне граничне значення керуючого сигналу umin, потім на один крок максимальне значення umax. Обчислювач 11 запам'ятовує дані у вигляді ' векторів (ui ωi ωi ), де i=1,…, n - номер кроку дискретизації, n - кількість знятих точок. На основі точок від 1 до n - 1 за методом найменших квадратів в обчислювачі 11 апроксимується ' (поліномом другого ступеня) залежність ω'=f(ω) і визначається значення прискорення ω1 яким би воно було в момент часу n, якщо б керуючий сигнал не змінився. Крім того, обчислювач має фактичне значення прискорення в n-й момент часу: ω2'=ωn'. Таким чином, маємо дві точки при ω=const (одну обчислену і одну дійсну), на основі яких обчислювач 11 визначає Δω'=(ω2'-ω1'), Δu=(u2-u1) і за формулою (1) обчислює коефіцієнт k11. Потім обчислювач 12 працює в робочому режимі і розраховує керуючий сигнал за формулою (2), а обчислювач 11 постійно видає розраховане раніше значення k11. Після цього проводиться ідентифікація параметра k21. Обчислювач 9 подає мінімальне граничне значення ω1=-ωmax. Потім через деякий час подається ω2=+ωmax, та через деякий час знову ω3=-ωmax. Проміжки часу між змінами величин ωd в обчислювачі 9 задані таким чином, щоб закінчився перехідний процес та регулятор частоти обертів (обчислювачі 10-12) встановив фактичне значення ω рівним потрібному заданому ωd. При цьому обчислювач 8 на кожному кроці дискретизації запам'ятовує дані у вигляді векторів (ωi, Vi, Vi'), де i= 1,…, n - номер кроку дискретизації, n - кількість знятих точок. На основі цих точок за методом найменших квадратів в обчислювачі 8 виконується апроксимація залежності та отримується поліном виду ω=а1+a2V+a3V', де а1,2,3 - коефіцієнти полінома. Тут коефіцієнт а3 і є шуканим коефіцієнтом k21. Після ідентифікації обчислювач 9 також починає працювати в робочому режимі і розраховувати необхідне значення швидкості обертів гвинта за формулою (3), а обчислювач 8 постійно видає розраховане раніше значення k21. За необхідністю процес ідентифікації коефіцієнтів k11 і k21 може бути повторений пізніше. Таким чином, вирішуються задачі підвищення точності керування (в режимі динамічного руху - зменшення похибки в 1,5-2 рази), оскільки керування відбувається на базі інверсної моделі об'єкта, а також забезпечується значне спрощення системи керування (за кількістю використаних елементів - майже в 4 рази) і можливість її синтезу в умовах невизначеності параметрів математичної моделі ПА, оскільки необхідні параметри можуть бути ідентифіковані в будь-який час в процесі роботи - в онлайн-режимі. 3 UA 107976 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 20 Система автоматичного керування швидкістю руху підводного апарата на базі інверсної моделі з онлайн-ідентифікацією параметрів, що містить задавач вхідного сигналу, датчик швидкості руху підводного апарата і датчик частоти обертів гребного гвинта, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт та підводний апарат (ПА) як об'єкт керування, яка відрізняється тим, що в неї додатково введені обчислювач прискорення ПА, перший обчислювач інерційного коефіцієнта, обчислювач необхідної частоти обертів гвинта, обчислювач прискорення частоти обертів гвинта, другий обчислювач інерційного коефіцієнта та обчислювач керуючого сигналу, при цьому вхід обчислювача прискорення ПА зв'язаний з виходом датчика швидкості руху ПА, входи першого обчислювача інерційного коефіцієнта зв'язані з виходами датчика швидкості руху ПА, обчислювача прискорення ПА і обчислювача необхідної частоти обертів гвинта, входи якого зв'язані з виходами задавача вхідного сигналу, обчислювача прискорення ПА, першого обчислювача інерційного коефіцієнта і датчика швидкості руху ПА, а вихід - з входами обчислювача керуючого сигналу та першого обчислювача інерційного коефіцієнта, вхід обчислювача прискорення частоти обертів гвинта зв'язаний з виходом датчика частоти обертів гребного гвинта, входи другого обчислювача інерційного коефіцієнта зв'язані з виходами датчика частоти обертів гребного гвинта, обчислювача прискорення частоти обертів гвинта і обчислювача керуючого сигналу, входи обчислювача керуючого сигналу зв'язані з виходами обчислювача необхідної частоти обертів гвинта, обчислювача прискорення частоти обертів гвинта, другого обчислювача інерційного коефіцієнта і датчика частоти обертів гребного гвинта, а вихід - з входами силового перетворювача та другого обчислювача інерційного коефіцієнта. Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B63H 25/00, B63G 8/00
Мітки: система, швидкістю, керування, автоматичного, параметрів, підводного, моделі, базі, апарата, інверсної, онлайн-ідентифікацією, руху
Код посилання
<a href="https://ua.patents.su/6-107976-sistema-avtomatichnogo-keruvannya-shvidkistyu-rukhu-pidvodnogo-aparata-na-bazi-inversno-modeli-z-onlajjn-identifikaciehyu-parametriv.html" target="_blank" rel="follow" title="База патентів України">Система автоматичного керування швидкістю руху підводного апарата на базі інверсної моделі з онлайн-ідентифікацією параметрів</a>
Регулятор частоти обертів гребного гвинта підводного апарата на базі інверсної моделі з онлайн-ідентифікацією параметрів
Номер патенту: 106812
Опубліковано: 10.10.2014
Автор: Блінцов Сергій Володимирович
МПК: B63H 25/00, B63G 8/00
Мітки: онлайн-ідентифікацією, гвинта, базі, інверсної, моделі, параметрів, обертів, регулятор, частоти, апарата, підводного, гребного
Формула / Реферат:
Регулятор частоти обертів гребного гвинта підводного апарата на базі інверсної моделі з онлайн-ідентифікацією параметрів, що містить задавач вхідного сигналу, датчик частоти обертів гребного гвинта та послідовно з'єднані силовий перетворювач, електродвигун і гребний гвинт, який відрізняється тим, що в нього додатково введені обчислювач прискорення частоти обертів, обчислювач інерційного коефіцієнта та обчислювач керуючого сигналу, при цьому...
Система автоматичного керування швидкістю руху підводного апарата по одній осі координат
Номер патенту: 101201
Опубліковано: 11.03.2013
Автор: Блінцов Сергій Володимирович
МПК: B63G 8/00, B63H 25/00, B63H 21/21
Мітки: координат, швидкістю, одний, керування, осі, руху, апарата, підводного, система, автоматичного
Формула / Реферат:
Система автоматичного керування швидкістю руху підводного апарата по одній осі координат, яка містить задавач вхідного сигналу, датчики швидкості та частоти обертання гребного гвинта, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що до неї додатково введено апроксиматор залежності приросту швидкості і прискорення руху підводного апарата від його...
Система автоматичного керування рухом підводного апарата в горизонтальній площині
Номер патенту: 101202
Опубліковано: 11.03.2013
Автор: Блінцов Сергій Володимирович
МПК: B63H 25/00, B63G 8/00
Мітки: апарата, рухом, горизонтальний, керування, автоматичного, підводного, площині, система
Формула / Реферат:
Система автоматичного керування рухом підводного апарата в горизонтальній площині, яка містить задавач вхідного сигналу, датчик лінійної швидкості руху підводного апарата, датчик частоти обертання першого гребного гвинта, перший канал виконавчого механізму, що об'єднує послідовно з'єднані перший силовий перетворювач, перший електродвигун, перший гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що перший...
Система автоматичного керування лінійною та кутовою швидкостями підводного апарата
Номер патенту: 101200
Опубліковано: 11.03.2013
Автор: Блінцов Сергій Володимирович
МПК: B63H 25/00, B63G 8/00
Мітки: кутовою, підводного, апарата, швидкостями, автоматичного, система, керування, лінійною
Формула / Реферат:
Система автоматичного керування лінійною та кутовою швидкостями підводного апарата, яка містить задавач вхідного сигналу, датчик лінійної швидкості руху підводного апарата, датчик частоти обертання першого гребного гвинта, перший канал виконавчого механізму, що об'єднує послідовно з'єднані перший силовий перетворювач, перший електродвигун, перший гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що перший...
Система автоматичного керування глибиною підводного апарата
Номер патенту: 4782
Опубліковано: 15.02.2005
Автор: Блінцов Сергій Володимирович
МПК: B63G 8/00
Мітки: глибиною, система, підводного, автоматичного, керування, апарата
Формула / Реферат:
Система автоматичного керування глибиною підводного апарата, що містить програмний пристрій, датчики глибини (висоти над ґрунтом) та вертикальної швидкості, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що в ній додатково введено суматор, зв'язаний з датчиком глибини (висоти над ґрунтом) та програмним пристроєм, апроксиматор залежності гальмівного...
Попередній патент: Спосіб виробництва фітоолійного каротиновмісного напівфабрикату
Наступний патент: Спосіб зміни проникності гірських порід
Випадковий патент: Фурма для продування металу