Система автоматичного керування лінійною та кутовою швидкостями підводного апарата
Формула / Реферат
Система автоматичного керування лінійною та кутовою швидкостями підводного апарата, яка містить задавач вхідного сигналу, датчик лінійної швидкості руху підводного апарата, датчик частоти обертання першого гребного гвинта, перший канал виконавчого механізму, що об'єднує послідовно з'єднані перший силовий перетворювач, перший електродвигун, перший гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що перший гребний гвинт є лівим гвинтом, система містить другий канал виконавчого механізму для забезпечення окремого керування другим гребним гвинтом, в другий канал введено послідовно з'єднані другий силовий перетворювач, другий електродвигун, другий гребний гвинт, що є правим гвинтом; система також містить датчик кутової швидкості руху підводного апарата, датчик частоти обертання другого гребного гвинта, обчислювач керуючих сигналів для обох каналів, перший і другий входи якого зв'язані з відповідними виходами задавача вхідного сигналу, третій, четвертий, п'ятий і шостий входи - відповідно з датчиками лінійної і кутової швидкостей апарата й частоти обертання правого і лівого гвинтів, а перший і другий виходи - відповідно з першим та другим силовими перетворювачами каналів виконавчих механізмів лівого і правого гребних гвинтів, апроксиматор, зв'язаний шістьма входами відповідно з третім-восьмим виходами обчислювача, першим і другим виходами - відповідно з сьомим і восьмим входами обчислювача і оснащений програмою на базі штучних нейронних мереж для апроксимації залежності приростів лінійної і кутової швидкостей руху підводного апарата від його поточного стану та керуючих сигналів по правому і лівому каналах на основі попередньо отриманих даних.
Текст
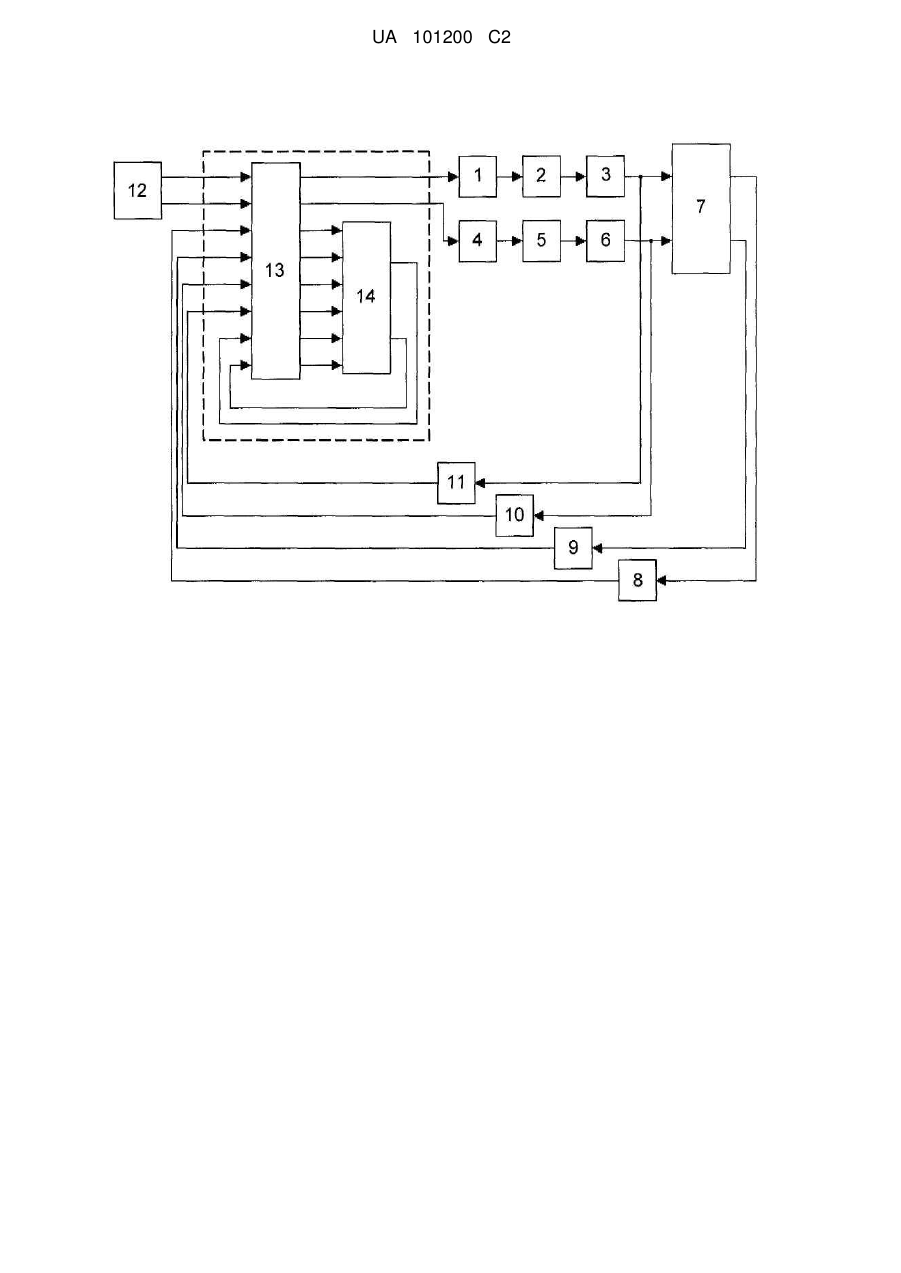
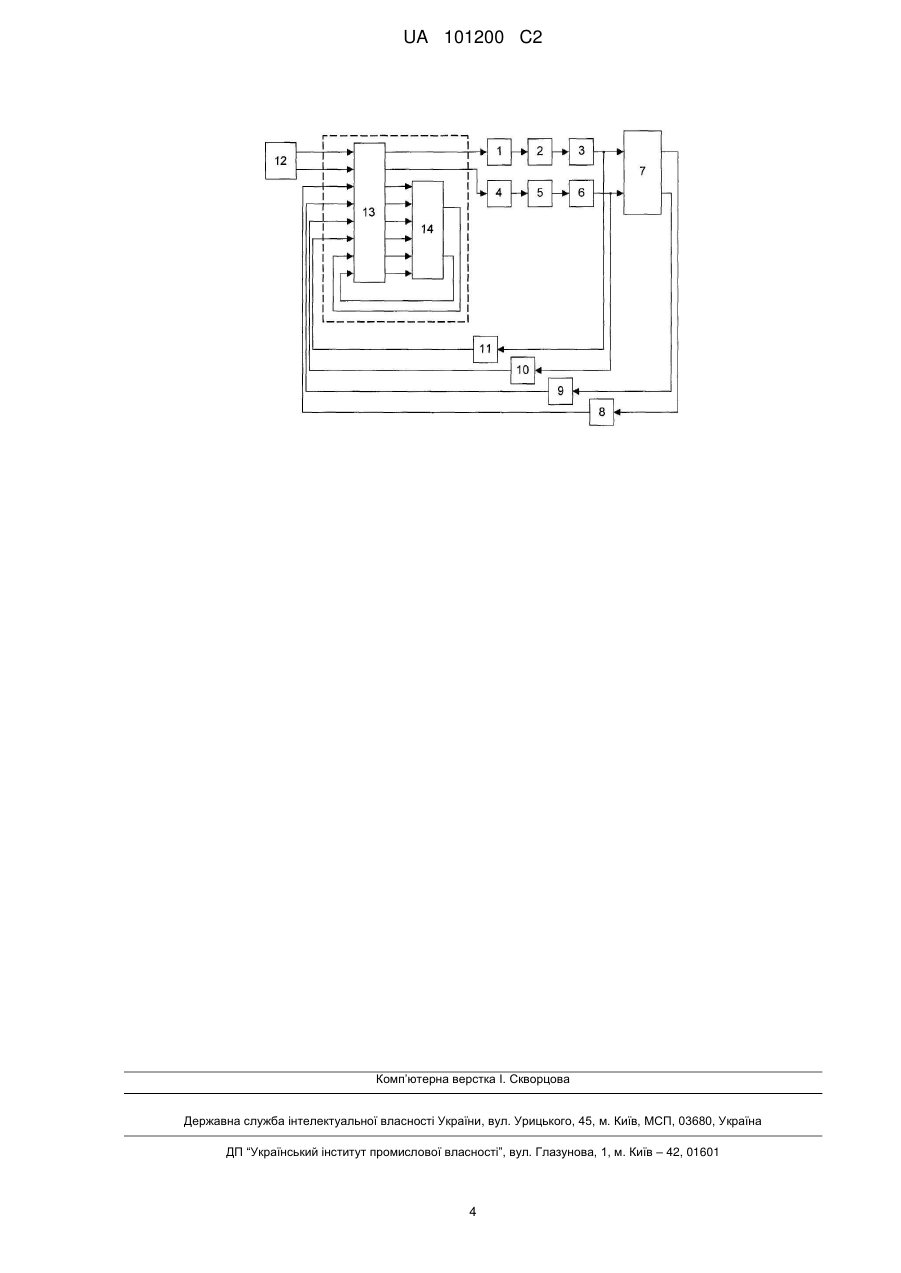
Реферат: Винахід належить до галузі суднобудування і призначений для підводних апаратів. Система автоматичного керування лінійною та кутовою швидкостями підводного апарата містить задавач вхідного сигналу, датчик лінійної швидкості руху підводного апарата, датчик частоти обертання гребного гвинта, перший канал виконавчого механізму, що об'єднує послідовно з'єднані перший силовий перетворювач, перший електродвигун, перший гребний гвинт, а також підводний апарат як об'єкт керування. Система також містить другий канал виконавчого механізму аналогічної будови. Також введені датчик кутової швидкості руху підводного апарата, датчик частоти обертання другого гребного гвинта, обчислювач керуючих сигналів для обох каналів, входи якого зв'язані з відповідними виходами задавача вхідного сигналу та з датчиками лінійної і кутової швидкостей апарата й частоти обертання другого й першого гвинтів, а виходи відповідно з силовими перетворювачами каналів виконавчих механізмів гребних гвинтів. Апроксиматор зв'язаний входами з виходами обчислювача, виходами - з входами обчислювача і оснащений програмою на базі штучних нейронних мереж для апроксимації залежності приростів лінійної і кутової швидкостей руху підводного апарата від його поточного стану та керуючих сигналів по правому і лівому каналах на основі попередньо отриманих даних. Технічним результатом винаходу є можливість одночасного керування прямолінійним і обертовим рухами підводного апарата в горизонтальній площині, а також можливість синтезу системи керування в умовах невизначеності параметрів математичної моделі об'єкта. UA 101200 C2 (12) UA 101200 C2 UA 101200 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до галузі суднобудування і призначений для підводних апаратів (ПА), які використовують для переміщення в горизонтальній площині два гребних гвинти з електричним приводом, завдяки яким виконується як прямолінійний рух, так і повороти (навколо вертикальної осі). Відомо про систему автоматичного керування глибиною підводного апарата (Блінцов С.В. Деклараційний патент на корисну модель № 4782, опубл. 15.02.2005, бюл. № 2). Система керування містить: програмний пристрій, датчики глибини (висоти над ґрунтом) та вертикальної швидкості, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, підводний апарат як об'єкт керування, а також суматор, зв'язаний з датчиком глибини (висоти над ґрунтом) та програмним пристроєм, апроксиматор залежності гальмівного шляху підводного апарата від його вертикальної швидкості, зв'язаний з датчиком вертикальної швидкості, та обчислювач, входи якого зв'язані з суматором, апроксиматором і датчиком вертикальної швидкості, а вихід з силовим перетворювачем. Така система керування може бути синтезована в умовах невизначеності параметрів математичної моделі ПА, але вона призначена для ступінчатої зміни глибини занурення ПА і не підходить для керування швидкістю, тим більше для одночасного керування лінійним і обертовим рухом. Найбільш близьким аналогом є адаптивна система із змінною структурою для керування швидкістю руху підводного робота (Юхимец ДА, Филаретов В.Ф., патент RU 2215318 С1, опубл. 27.10.2003). Такий пристрій містить послідовно з'єднані перший блок множення, перший суматор, перший релейний елемент, фільтр, блок виділення модуля, вимірник неузгодженості, ключ, другий вхід якого через другий релейний елемент приєднаний до виходу першого блока виділення модуля, інтегратор, другий суматор, другий вхід якого з'єднаний з виходом джерела еталонного сигналу й другим входом першого вимірника неузгодженості, а його вихід з'єднаний з першим входом першого блока множення, послідовно з'єднані третій суматор, перший вхід якого з'єднаний із входом системи, другий блок виділення модуля, другий блок множення, другий вхід якого з'єднаний з виходом першого релейного елемента, і четвертий суматор, а також датчик прискорення руху підводного робота, установлений на корпусі підводного робота, що підключений до другого входу першого суматора, причому другий вхід першого блока множення з'єднаний із входом другого блока виділення модуля, послідовно з'єднані третій блок виділення модуля, третій блок множення, п'ятий суматор, другий вхід якого підключений до виходу датчика швидкості руху підводного робота, установленого на корпусі підводного робота, входу третього блока виділення модуля й другому входу третього суматора, шостий суматор, другий вхід якого з'єднаний з виходом четвертого блока множення, п'ятий блок множення, сьомий суматор, підсилювач, двигун і гвинт, жорстко пов'язаний з валом двигуна, а також послідовно з'єднані датчик швидкості обертання вала двигуна, установлений на цьому валу, четвертий блок виділення модуля, восьмий суматор, шостий блок множення, дев'ятий суматор, перший нелінійний елемент, другий нелінійний елемент, вхід якого підключений до другого входу четвертого блока множення, перший блок ділення, другий вхід якого з'єднаний з виходом десятого суматора, перший вхід якого підключений до виходу п'ятого суматора й через квадратор - до другого входу дев'ятого суматора, сьомий блок множення, другий вхід якого з'єднаний з виходом четвертого блока виділення модуля, другим входом п'ятого блока множення й першим входом восьмого блока множення, вихід якого підключений до другого входу сьомого суматора, одинадцятий суматор, другий вхід якого з'єднаний з виходом шостого суматора, а третій вхід - із третім входом шостого суматора, другим входом десятого суматора, другим входом восьмого блоку множення й виходом восьмого суматора, дев'ятий блок множення, другий вхід якого підключений до другого входу четвертого блока множення, другого входу третього блока множення й через третій релейний елемент - до виходу датчика швидкості обертання вала двигуна, третього входу сьомого суматора, четвертого входу одинадцятого суматора, другого входу восьмого суматора, другого входу шостого блоку множення й третього входу п'ятого суматора, третій нелінійний елемент, другий блок розподілу, вихід якого з'єднаний із четвертим входом сьомого суматора, а другий вхід - з виходом дванадцятого суматора, перший вхід якого підключений до виходу четвертого суматора, а другий вхід - до виходу п'ятого блока множення й другого входу четвертого суматора. У вказаній системі керування визначення керуючого сигналу проводиться на основі математичної моделі об'єкта з урахуванням нелінійностей. Основною проблемою є висока складність визначення коефіцієнтів системи керування, а також параметрів моделі, що унеможливлює синтез такої системи в умовах невизначеності цих параметрів. Крім того, вона вирішує лише задачу керування прямолінійним рухом за допомогою одного гвинта і не підходить для одночасного керування лінійним і обертовим рухами в системі з двома гвинтами. 1 UA 101200 C2 5 10 15 20 25 30 35 40 Ставиться задача удосконалення системи автоматичного керування лінійною та кутовою швидкостями ПА шляхом додаткового введення елементів обчислення керуючих впливів на електродвигуни двох гребних гвинтів, що приводить до можливості одночасного керування прямолінійним і обертовим рухами ПА в горизонтальній площині й можливості синтезу системи керування в умовах невизначеності параметрів математичної моделі ПА. Поставлена задача вирішується тим, що в системі автоматичного керування лінійною та кутовою швидкостями ПА, яка містить задавач вхідного сигналу, датчик лінійної швидкості руху підводного апарата, датчик частоти обертання гребного гвинта, канал виконавчого механізму, що об'єднує послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, відповідно до винаходу створено другий канал виконавчого механізму для забезпечення окремого керування правим і лівим гребними гвинтами, в який введено послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, також введені датчик кутової швидкості руху підводного апарата, датчик частоти обертання гребного гвинта по другому каналу, обчислювач керуючих сигналів для обох каналів, перший і другий входи якого зв'язані з відповідними виходами задавача вхідного сигналу, третій, четвертий, п'ятий і шостий входи - відповідно з датчиками лінійної і кутової швидкостей апарата й частоти обертання правого й лівого гвинтів, а перший і другий виходи - відповідно з силовими перетворювачами каналів виконавчих механізмів лівого і правого гребних гвинтів, апроксиматор, зв'язаний шістьма входами відповідно з третім-шостим виходами обчислювача, першим і другим виходами - відповідно з сьомим і восьмим входами обчислювача і оснащений програмою на базі штучних нейронних мереж для апроксимації залежності приростів лінійної і кутової швидкостей руху підводного апарата від його поточного стану та керуючих сигналів по правому і лівому каналах на основі попередньо отриманих даних. Суть пропозиції полягає в наступному. Обчислювач керуючих сигналів на основі даних, отриманих з апроксиматора (нейромережної моделі об'єкта керування), розраховує два керуючих сигнали ur i uI - для правого і лівого каналів виконавчих механізмів (приводів правого і лівого маршових гребних гвинтів) таким чином, щоб через інтервал керування tC (наприклад, 0,1 секунди) фактичні значення лінійної і кутової швидкостей дорівнювали заданим, які отримані із задавача вхідного сигналу. Потім значення uI і ur подаються на відповідні виконавчі механізми, але не на протязі всього проміжку часу tC, а на протязі, наприклад, півінтервалу tC/2 (або, в загальному випадку, tC/k, де k 2). В кінці цього півінтервалу, з урахуванням нового стану об'єкта і нових заданих значень керованих величин, знов розраховуються керуючі сигнали для наступного інтервалу, які знов подаються на протязі півінтервалу. Далі процес повторюється. Завдяки цьому система керування забезпечує досить точну динаміку руху ПА, який, навіть в першому наближенні, є об'єктом другого порядку, при цьому система керування працює лише по керованій величині й не враховує її похідні при генерації керуючих впливів. Крім того, вирішується задача одночасного керування лінійним та обертовим рухами, а також можна відзначити, що описана система керування може бути синтезована в умовах невизначеності параметрів математичної моделі підводного апарата, що не може бути здійснено за схемою прототипу. Структурна схема пропонованої системи показана на рисунку. Система автоматичного керування лінійною та кутовою швидкостями ПА містить: послідовно з'єднані перший силовий перетворювач 1, виходом якого є напруга живлення uI, перший 45 50 55 електродвигун 2, який забезпечує кутову частоту обертання 1 лівого гвинта 3, що розвиває упор TI,. Послідовно з'єднані другий силовий перетворювач 4, виходом якого є напруга живлення ur другий електродвигун 5, який забезпечує кутову частоту обертання r правого гвинта 6, що розвиває упор Тr. Підводний апарат 7, як об'єкт керування, оснащений датчиком 8 лінійної швидкості руху по осі х, датчиком 9 кутової швидкості обертання ПА навколо осі у, датчиком 10 частоти обертання правого гребного гвинта, зв'язаним з гвинтом 6, датчиком 11 частоти обертання лівого гребного гвинта, зв'язаним з гвинтом 3. Задавач вхідного сигналу 12, який задає значення лінійної і кутової швидкостей згідно з програмою руху, першим і другим виходами зв'язаний з обчислювачем 13. Обчислювач керуючих сигналів 13 для правого і лівого каналів першим і другим входами зв'язаний з відповідними виходами задавача 12, третім, четвертим, п'ятим та шостим входами відповідно з датчиками 8, 9, 10 і 11, а першим і другим виходами - відповідно з першим і другим силовими перетворювачами 1 і 4. Апроксиматор 14, зв'язаний шістьма входами відповідно з третім-восьмим виходами обчислювача 13, першим і другим виходами - відповідно з сьомим І восьмим входами обчислювача 13 і оснащений програмою на базі штучних нейронних мереж, яка відтворює залежність приростів лінійної і кутової швидкостей руху підводного апарата через інтервал керування tC від поточних значень 2 UA 101200 C2 його лінійної і кутової швидкостей і частот обертання правого й лівого гребних гвинтів, а також керуючих сигналів по правому і лівому каналах на основі попередньо отриманих даних. Апроксиматор 14 реалізує залежність: Vx , y f Vx0 , y0 , , r , u , ur , 5 де Vx = V3 – Vx0 - різниця між заданою швидкістю V3, яка має бути через 0,1 с, та фактичною швидкістю \/х0; y y3 y0 - різниця між заданою кутовою швидкістю y3 та фактичною y0 10 15 20 25 30 швидкістю . До складу системи керування входять пристрої 13 і 14. Апроксиматор 14 містить одну або декілька штучних нейронних мереж, алгоритми роботи яких описані в літературі (Круглое В.В., Борисов В.В. Искусственные нейронные сети. Теория и практика. - М.: «Горячая линия Телеком», 2002. - с.10-20, с.89-134 [1]). Апроксиматор та обчислювач можуть бути реалізовані програмно на базі ЕОМ або загальновідомих мікроконтролерів (Motorola, Intel, РІС-контролери). Пропонована система працює наступним чином. З інтервалом часу tC/2 (або tC/k) система керування опитує датчики 8, 9, 10, 11 і задавач вхідного сигналу 12. Обчислювач 13 розраховує, якими мають бути прирости кутової і лінійної швидкостей руху ПА за час наступного інтервалу tC (згідно з законом керування, що надходить із задавача вхідного сигналу 12). Потім обчислювач 13 багаторазово звертається до апроксиматора 14, послідовно перебираючи всі допустимі комбінації значень керуючих сигналів ur і и і, поки не визначить такі значення, які забезпечать потрібні прирости обох швидкостей. Далі протягом проміжку часу tC/2 на виконавчі механізми (силові перетворювачі1 і 4, з якими послідовно зв'язані електродвигуни 2 і 5 і гребні гвинти 3 і 6, відповідно) подаються відповідні значення керуючої напруги. Через проміжок часу tC/2 знов опитуються датчики 8, 9, 10, 11, задавач вхідного сигналу 12 і процес генерації керуючого сигналу повторюється на наступний інтервал tC. В такий спосіб забезпечується необхідна динаміка руху ПА, оскільки керуючий сигнал буде постійно уточнюватись, відслідковуючи фактично не тільки швидкості, але й відтворюючи необхідні прискорення. При цьому спільно генеруються сигнали для правого й лівого каналів виконавчих механізмів -гребних гвинтів. Таким чином, вирішується задача одночасного керування прямолінійним і обертовим рухами ПА в горизонтальній площині, а також забезпечується можливість синтезу системи керування в умовах невизначеності параметрів математичної моделі ПА. ФОРМУЛА ВИНАХОДУ 35 40 45 50 Система автоматичного керування лінійною та кутовою швидкостями підводного апарата, яка містить задавач вхідного сигналу, датчик лінійної швидкості руху підводного апарата, датчик частоти обертання першого гребного гвинта, перший канал виконавчого механізму, що об'єднує послідовно з'єднані перший силовий перетворювач, перший електродвигун, перший гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що перший гребний гвинт є лівим гвинтом, система містить другий канал виконавчого механізму для забезпечення окремого керування другим гребним гвинтом, в другий канал введено послідовно з'єднані другий силовий перетворювач, другий електродвигун, другий гребний гвинт, що є правим гвинтом; система також містить датчик кутової швидкості руху підводного апарата, датчик частоти обертання другого гребного гвинта, обчислювач керуючих сигналів для обох каналів, перший і другий входи якого зв'язані з відповідними виходами задавача вхідного сигналу, третій, четвертий, п'ятий і шостий входи - відповідно з датчиками лінійної і кутової швидкостей апарата й частоти обертання правого і лівого гвинтів, а перший і другий виходи відповідно з першим та другим силовими перетворювачами каналів виконавчих механізмів лівого і правого гребних гвинтів, апроксиматор, зв'язаний шістьма входами відповідно з третімвосьмим виходами обчислювача, першим і другим виходами - відповідно з сьомим і восьмим входами обчислювача і оснащений програмою на базі штучних нейронних мереж для апроксимації залежності приростів лінійної і кутової швидкостей руху підводного апарата від його поточного стану та керуючих сигналів по правому і лівому каналах на основі попередньо отриманих даних. 3 UA 101200 C2 Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomatic control system of linear and angular velocities of underwater vehicle
Автори англійськоюBlintsov Serhii Volodymyrovych
Назва патенту російськоюСистема автоматического управления линейной и угловой скоростями подводного аппарата
Автори російськоюБлинцов Сергей Владимирович
МПК / Мітки
МПК: B63G 8/00, B63H 25/00
Мітки: апарата, система, автоматичного, кутовою, керування, лінійною, підводного, швидкостями
Код посилання
<a href="https://ua.patents.su/6-101200-sistema-avtomatichnogo-keruvannya-linijjnoyu-ta-kutovoyu-shvidkostyami-pidvodnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система автоматичного керування лінійною та кутовою швидкостями підводного апарата</a>
Система автоматичного керування глибиною підводного апарата
Номер патенту: 4782
Опубліковано: 15.02.2005
Автор: Блінцов Сергій Володимирович
МПК: B63G 8/00
Мітки: система, підводного, апарата, автоматичного, керування, глибиною
Формула / Реферат:
Система автоматичного керування глибиною підводного апарата, що містить програмний пристрій, датчики глибини (висоти над ґрунтом) та вертикальної швидкості, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що в ній додатково введено суматор, зв'язаний з датчиком глибини (висоти над ґрунтом) та програмним пристроєм, апроксиматор залежності гальмівного...
Система керування безпілотного літального апарата
Номер патенту: 45231
Опубліковано: 26.10.2009
Автори: Честних Тимур Володимирович, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: літального, апарата, керування, безпілотного, система
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також датчиків кута та кутової швидкості, виходи яких з'єднані з входами відповідно першого та другого нормуючих підсилювачів, виходи яких з'єднані з другим та третім входами мультиплексора,...
Відмовостійка система керування боковим рухом безпілотного літального апарата

Номер патенту: 35088
Опубліковано: 26.08.2008
Автори: Симонов Володимир Федорович, Амеліна Ірина Вікторівна, Бандура Іван Миколайович
МПК: B64C 13/00, G05D 1/03
Мітки: апарата, літального, керування, система, рухом, боковим, відмовостійка, безпілотного
Формула / Реферат:
Відмовостійка система керування боковим рухом безпілотного літального апарата, що містить перший датчик кутової швидкості рискання, перший та другий суматори, перший та другий підсилювачі, привід керма напрямку, датчик положення керма напрямку, перший датчик кутової швидкості крену, привід елеронів, обчислювач значень кута крену, перший, другий датчики тиску, датчик положення елеронів, блок віднімання, формувач значень сигналу кута ковзання,...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Величко Надія Вікторівна, Симонов Володимир Федорович
МПК: G05D 1/03, B64C 13/00
Мітки: апарата, безпілотного, літального, стабілізації, система
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Система керування безпілотного літального апарата

Номер патенту: 65814
Опубліковано: 12.12.2011
Автори: Антонєвич Ганна Олександрівна, Кописов Олег Едуардович, Фірсов Сергій Миколайович
МПК: B64C 13/00
Мітки: керування, літального, безпілотного, система, апарата
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також трьох датчиків кута та трьох датчиків кутової швидкості, виходи яких з'єднані з входами відповідно першого, п'ятого, шостого, другого, сьомого, восьмого нормуючих підсилювачів,...
Попередній патент: Спосіб та пристрій для удосконалення pcc для мобільності на основі потоків
Наступний патент: Система автоматичного керування швидкістю руху підводного апарата по одній осі координат
Випадковий патент: Підшипник кочення