Система автоматичного керування глибиною підводного апарата
Формула / Реферат
Система автоматичного керування глибиною підводного апарата, що містить програмний пристрій, датчики глибини (висоти над ґрунтом) та вертикальної швидкості, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що в ній додатково введено суматор, зв'язаний з датчиком глибини (висоти над ґрунтом) та програмним пристроєм, апроксиматор залежності гальмівного шляху підводного апарата від його вертикальної швидкості, зв'язаний з датчиком вертикальної швидкості, та обчислювач, входи якого зв'язані з суматором, апроксиматором і датчиком вертикальної швидкості, а вихід - з силовим перетворювачем.
Текст
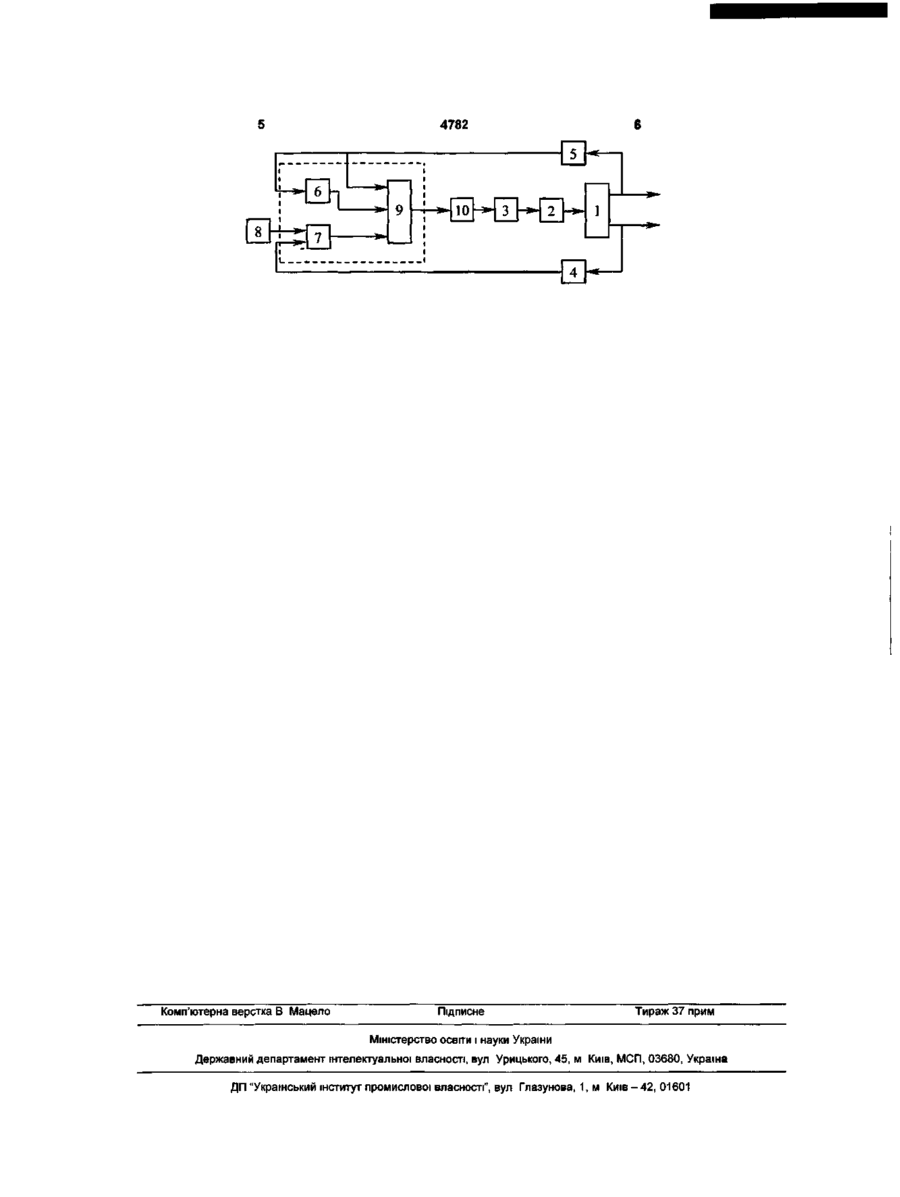
Система автоматичного керування глибиною підводного апарата, що містить програмний пристрій, датчики глибини (висоти над ґрунтом) та вертикальної швидкості, послідовно з'єднані сило вий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що в ній додатково введено суматор, зв'язаний з датчиком глибини (висоти над ґрунтом) та програмним пристроєм, апроксиматор залежності гальмівного шляху підводного апарата від його вертикальної швидкості, зв'язаний з датчиком вертикальної швидкості та обчислювач, входи якого зв'язані з суматором, апроксиматором і датчиком вертикальної швидкості, а вихід - з силовим перетворювачем Корисна модель відноситься до галузі суднобудування і може бути застосований на підводних апаратах (ПА), які змінюють глибину (висоту над ґрунтом) за допомогою вертикального рушія та до яких висуваються вимоги високої швидкодії та точності керування глибиною (висотою) ПА Відомо про системи автоматичного керування рухом ПА, зокрема, стабілізацією глибини занурення ПА (Бровинская Н М , ТкаченкоА Н Системы управления подводными аппаратами Учебное пособие - Николаев НКИ, 1987 - с 67, [1], Автоматические подводные аппараты / Агеев М Д , Касаткин Б А , Киселев Л В и др - Л Судостроение, 1981 - с 83-88, [2]) Такі системи керування містять датчики глибини або висоти над ґрунтом, пристрій, що задає необхідну глибину ПА, суматор, зв'язаний з датчиками та пристроєм задавання глибини, пропорційно-інтегральний (ПІ) або пропорційно-інтегро-діференціальний (ПІД) регулятор, зв'язаний з виходом суматора і через силовий перетворювач з приводом виконавчого механізму, виконавчий механізм - руль горизонту, ПА як об'єкт керування В таких системах зміна глибини занурення або стабілізація глибини виконуються шляхом утворення диференту ПА, що ускладнює керування іншими приладами й системами ПА Основною проблемою таких систем керування є наявність мінімальної швидкості горизонтального руху ПА, нижче якої керування неможливе, при відсутності ходу ПА зміна його глибини неможлива без додаткової баластної системи, яка має малу швидкодію й точність Найбільш близьким аналогом є система автоматичного керування глибиною ПА за допомогою носового і кормового вертикальних гребних гвинтів, які приводяться у рух носовим і кормовим електродвигунами (Самоходные необитаемые подводные аппараты / Ю А Боженов, А П Борков, В М Гаврилов и др , Под общей ред И Б Иконникова Л Судостроение, 1986 - с 144-152, [3]) Система містить також програмний пристрій, який задає необхідну глибину ПА, пристрій обробки сигналів, зв'язаний з датчиками і програмним пристроєм, тахогенератори для внутрішнього зворотного зв'язку, силові перетворювачі, зв'язані з виходом пристрою обробки сигналів та електродвигунами, датчики глибини (висоти над ґрунтом) та вертикальної швидкості, об'єкт керування - ПА Така система керування має наступні проблеми - керування глибиною (висотою над ґрунтом) за пропорційним законом по відхиленню ([3], стор 145), що не забезпечує максимальну швидкодію переходу ПА з одної глибини на іншу та породжує перерегул ювання, - низька точність стабілізації глибини ПА ([3], стор 148), CM 00 О) 4782 - зайвина системи керування - наявність двох систем "електродвигун - гребний гвинт", що необхідно лише для штучного створювання диференту ПА, а безпосередньо для керування глибиною є зайвим. Ставиться задача удосконалення системи автоматичного керування глибиною ПА шляхом додаткового введення елементів обчислення керуючого впливу на електродвигун гребного гвинта для підвищення швидкодії системи, що приводить до підвищення якості керування ПА у цілому. Поставлена задача вирішується тим, що в системі автоматичного керування глибиною ПА, яка містить програмний пристрій, датчики глибини (висоти над ґрунтом) та вертикальної швидкості, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також ПА як об'єкт керування, відповідно до винаходу додатково введено суматор, зв'язаний з датчиком глибини (висоти над ґрунтом) та програмним пристроєм, апроксиматор залежності гальмівного шляху ПА від його вертикальної швидкості, зв'язаний з датчиком вертикальної швидкості, та обчислювач, входи якого зв'язані з суматором, апроксиматором і датчиком вертикальної швидкості, а вихід - з силовим перетворювачем гребного електродвигуна. Апроксиматор на основі закладеної у нього таблиці даних видає гальмівний шлях ПА по вертикалі у залежності від його поточної вертикальної швидкості. Обчислювач порівнює цей шлях зі шляхом по вертикалі, який потрібно пройти для досягнення нової глибини, і видає відповідний керуючий вплив на електродвигун (ЕД) гребного гвинта. За допомогою інформації з апроксиматора обчислювач визначає момент часу, коли потрібно включити реверс ЕД, щоб при гальмуванні ПА пройшов саме той шлях по вертикалі, який потрібен для його переходу на нову глибину. Завдяки цьому в системі з запропонованим регулятором час перехідних процесів зменшується в 1,5-2 рази, перерегулювання відсутнє, а усталена похибка залежить лише від точності датчиків глибини та швидкості. Структурна схема пропонованої системи показана на рисунку. Система автоматичного керування глибиною ПА містить: підводний апарат 1, як об'єкт керування; вертикальний рушій 2 - гребний гвинт, що розвиває вертикальний упор Fz; електродвигун 3, який забезпечує кутову частоту обертання ш рушія 2; датчик глибини занурення або висоти над ґрунтом 4; датчик вертикальної швидкості 5; апроксиматор 6, вхід якого зв'язаний з датчиком поточної швидкості 5, а виходом якого є гальмівний шлях пг; суматор 7, який обчислює похибку гіф між заданою глибиною h3, що надходить з програмного пристрою 8, та фактичною глибиною Н ПА, сигнал якої h надходить з датчика 4; обчислювач 9, на вхід якого подаються сигнали з апроксиматора 6, суматора 7 і датчика 5, а виходом якого є керуючий вплив u z , силовий перетворювач 10, входом якого є керуючий вплив u z з обчислювача 9, а виходом - напруга живлення U електродвигуна 3. До складу системи керування входять пристрої 6, 7 і 9. Апроксиматор 6 містить таблицю опорних значень залежності гальмівного шляху ПА по вертикалі hr від початкової вертикальної швидкості ПА v для всього робочого діапазону, та апроксимує її для кожного поточного значення вертикальної швидкості ПА. В ролі апроксиматора може бути використана нейромережа або нейрофаззіапроксиматор, алгоритми роботи яких відомі з літератури (Круглое В.В., Борисов В.В. Искусственные нейронные сети. Теория и практика. - М.: «Горячая линия - Телеком», 2002. - с. 10-20, с.89-134 [4]). Елементи: суматор, апроксиматор та обчислювач можуть бути реалізовані програмне на базі ЕОМ або загально відомих мікроконтролерів (Motorola, Intel, РІС-контролери). Пропонована система працює наступним чином. В усталеному режимі вертикальна швидкість ПА V=0, похибка Пф=0. При надходженні нової заданої глибини ги з програмного пристрою 8 суматор 7 обчислює нове значення похибки Пф=(п3-гі), тобто фактичний шлях по вертикалі, який ПА повинен пройти до нового заданого горизонту і зупинитися. Обчислювач 9 постійно порівнює цей шлях з гальмівним шляхом п г при поточній швидкості. Якщо Пф>пг, то обчислювач 9 видає максимальний позитивний керуючий вплив, електродвигун 3 переходить у режим максимальної потужності і гвинт 2 розвиває максимальний позитивний упор. При цьому ПА 1 рухається з максимально можливим прискоренням, а після розгону - з максимальною вертикальною швидкістю. Похибка ПА по вертикалі гіф зменшується максимально швидко. Якщо Пф п г! u z = - и 2 т а х , я к щ о п ф < пг; Ah j . m n Очевидно, що, оскільки ЕД постійно працює з максимально можливою потужністю, така система керування ПА має максимальну швидкодію. Порівняльні дослідження на ЕОМ відомої та запропонованої систем керування при вертикальних маневрах ПА показали, що при однакових умовах у запропонованого регулятора час перехідних процесів зменшується у 1,5-2 рази, перерегулювання відсутнє, а усталена похибка залежить лише від точності датчиків 4 і 5. 4782 5 0 8 1 9 -lr-*~ 10-i*• 3 -a* 1 2 / 4 Комп'ютерна верстка В Мацело Підписне Тираж 37 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул Урицького, 45, м Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул Глазунова, 1, м Київ-42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of automatic control of depth of underwater vehicle
Назва патенту російськоюСистема автоматического управления глубиной подводного аппарата
МПК / Мітки
МПК: B63G 8/00
Мітки: підводного, автоматичного, апарата, система, глибиною, керування
Код посилання
<a href="https://ua.patents.su/4-4782-sistema-avtomatichnogo-keruvannya-glibinoyu-pidvodnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система автоматичного керування глибиною підводного апарата</a>
Система автоматичного керування, контролю та реєстрації параметрів силової установки літального апарата
Номер патенту: 48884
Опубліковано: 15.02.2005
Автори: Безсчастний Микола Олексійович, БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28
Мітки: установки, автоматичного, силової, реєстрації, апарата, система, літального, контролю, параметрів, керування
Формула / Реферат:
Группа изобретений относится к области получения энергии за счет естественных факторов. Энергокомплекс имеет воздушную тяговую гелиоприемную трубу в виде трубопровода, проложенного по горному образованию. В трубе установлена первая ветротурбина. Выход трубы расположен на уровне холодного атмосферного воздуха. Секция подогрева насыщенного парами воды воздушного потока расположена на входе трубы возле подножия горы. На конечном участке трубы...
Система керування літаком
Номер патенту: 63672
Опубліковано: 15.01.2004
Автори: Бандура Іван Миколайович, Теницька Яна Миколаївна, Западня Артем Валентинович, Симонов Володимир Федорович
МПК: B64C 13/00
Мітки: літаком, система, керування
Формула / Реферат:
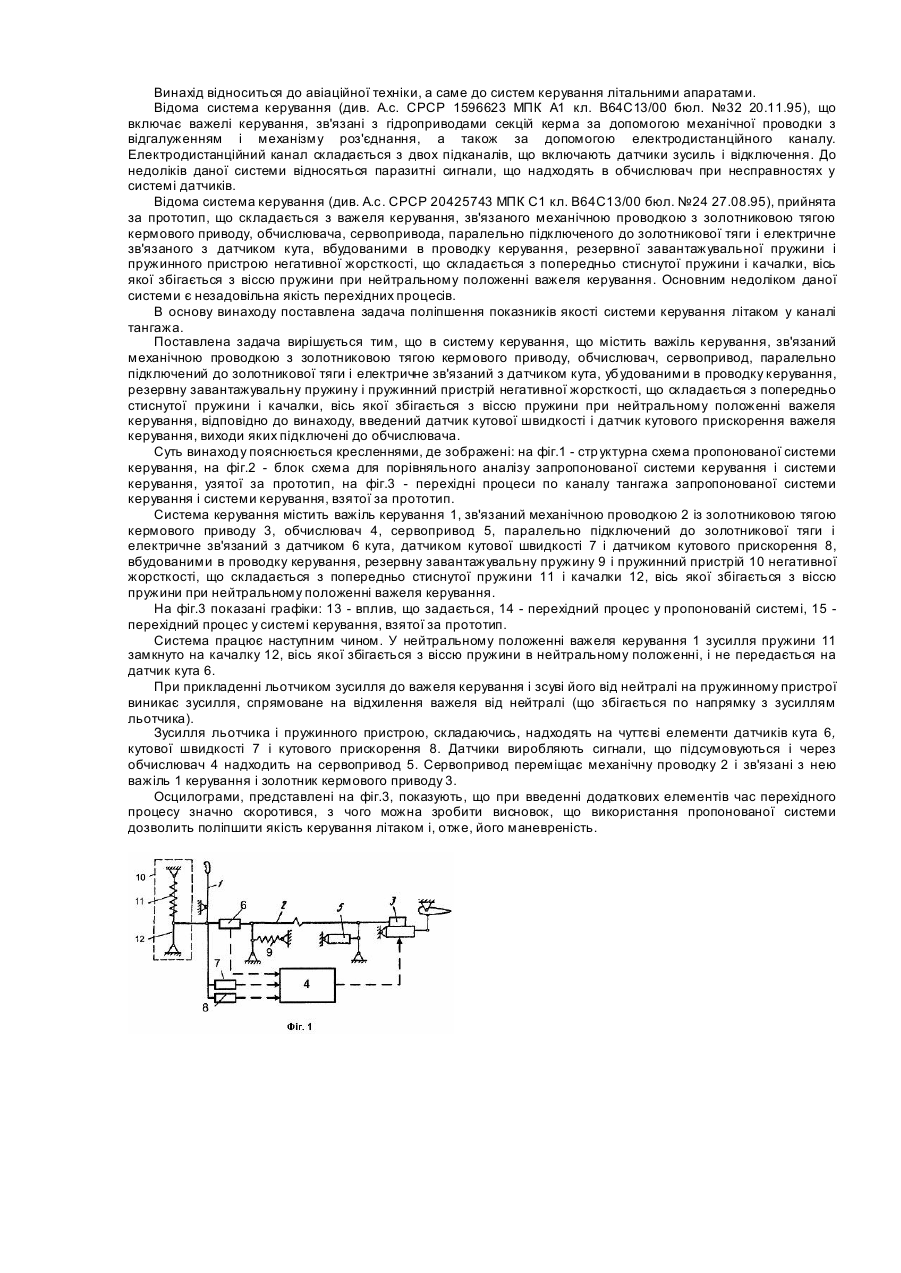
Система керування літаком, що складається з важеля керування, зв'язаного механічною проводкою з золотниковою тягою кермового приводу, обчислювача, сервоприводу, паралельно підключеного до золотникової тяги і електрично зв'язаного з датчиком кута, вмонтованими в проводку керування, резервної завантажувальної пружини і пружинного пристрою негативної жорсткості, що складається з попередньо стиснутої пружини і качалки, вісь якої збігається з...
Система керування двигуновою установкою літального апарата
Номер патенту: 61817
Опубліковано: 17.11.2003
Автори: Цехмейстер Олена Олексіївна, Бандура Іван Миколайович, Лазоркін Юрій Юрійович, Кулік Анатолій Степанович, Дигало Оксана Миколаївна
МПК: B64D 31/00
Мітки: установкою, система, літального, керування, апарата, двигуновою
Формула / Реферат:
Система керування двигуновою установкою літального апарата, що містить датчик частоти обертання ротора двигуна, електричний привід паливного агрегату, з'єднаний з паливним агрегатом, яка відрізняється тим, що в неї введені датчик тиску повітря за компресором, послідовно з'єднаний з блоком регулювань точності датчика тиску, датчик температури повітря за вентилятором, послідовно з'єднаний із блоком регулювань точності датчика температури, блок...
Система автоматичного керування процесом горіння
Номер патенту: 53941
Опубліковано: 17.02.2003
Автори: Бегунов Микола Павлович, Кашин Володимир Іванович, Грунський Віталій Павлович, Кашина Тетяна Олександрівна
МПК: F23N 1/02
Мітки: керування, горіння, автоматичного, процесом, система
Формула / Реферат:
Система автоматичного керування процесом горіння, що містить з'єднані в технологічній послідовності пальник, електроди підпалювання та наявності полум'я, трансформатор, автомат керування роботою пальника, клапан-відсікач газу, регулятор співвідношення газ/повітря, дросельну заслінку з електроприводом та перетворювач термоелектричний, яка відрізняється тим, що в електричний ланцюг регулювання потужності пальника введено мікропроцесорний...
Система автоматичного керування вивантажувальним транспортером коренеклубнезбиральної машини

Номер патенту: 71849
Опубліковано: 15.12.2004
Автори: Поляшенко Сергій Олексійович, Лебедєв Анатолій Тихонович
МПК: A01B 69/00
Мітки: машини, вивантажувальним, система, керування, транспортером, автоматичного, коренеклубнезбиральної
Формула / Реферат:
Система автоматичного керування вивантажувальним транспортером ко-ренеклубнезбиральної машини, що містить вивантажувальний транспортер, що включає головну і кінцеву секції, на яких установлені датчики безпеки, які своїми виходами підключені до входів електронного блока керування, у вивантажувальній частині кінцевої секції встановлений датчик відстані, виходом підключений до входу електронного блока керування, перший із виходів якого з'єднаний...
Попередній патент: Термофотовольтаїчний генератор
Наступний патент: Спосіб давидова для вільного редукування труб зі стоншуванням стінки
Випадковий патент: Шнековідцентровий ступінь насоса