Нелінійна пружна опора
Номер патенту: 108283
Опубліковано: 10.04.2015
Автори: Мосієнко Кирило Гарійович, Ткачьов Олексій Анатолійович, Ткачов Анатолій Вікторович, Сидоренко Ігор Іванович

Формула / Реферат
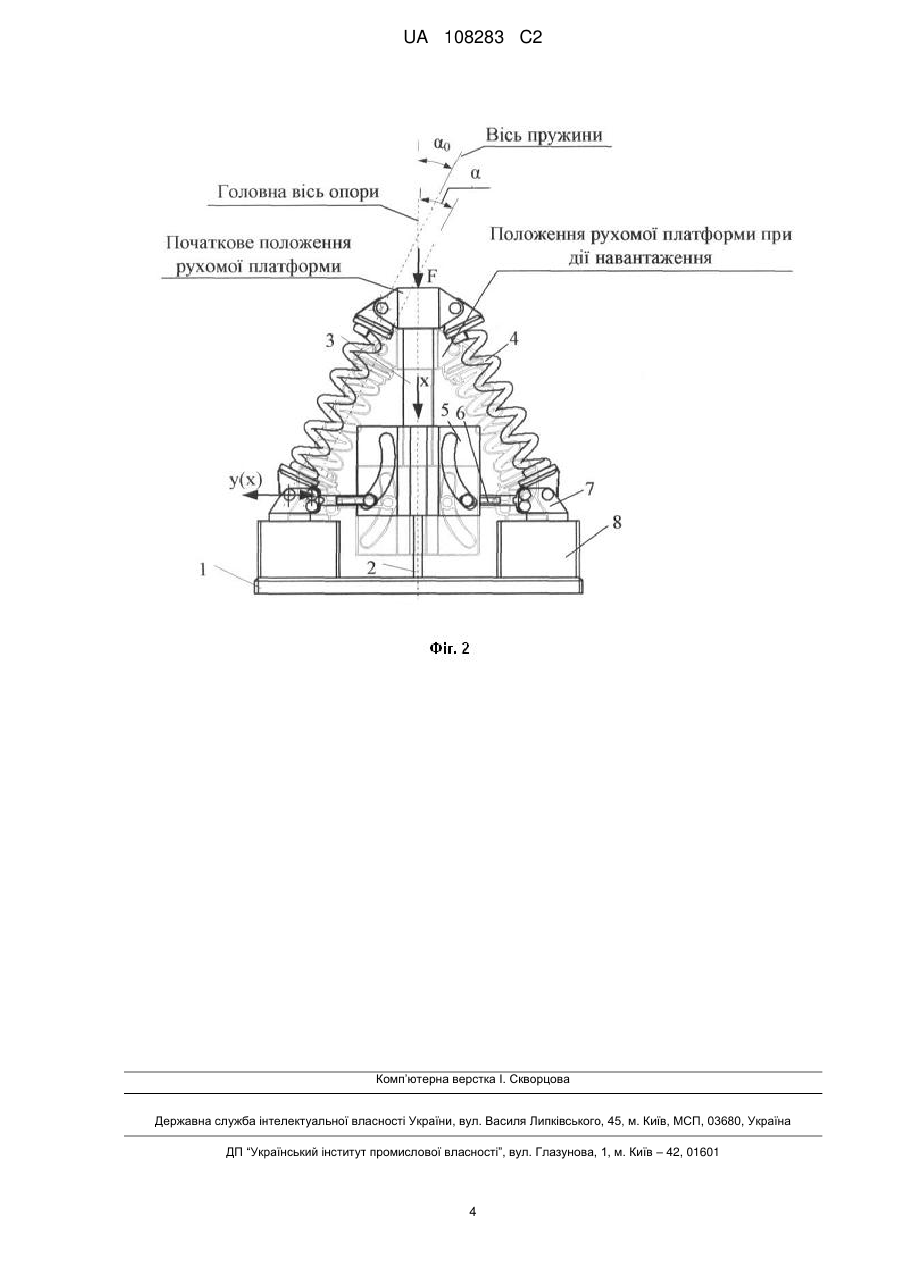
Нелінійна пружна опора, яка містить нерухому платформу з напрямними, рухому платформу та циліндричні пружини стискання, при цьому рухома платформа встановлена на напрямних нерухомої з можливістю переміщення вздовж них, а один кінець пружин закріплено на рухомій платформі, а осі пружин розташовані під кутом α0 до головної осі опори, яка відрізняється тим, що має в однаковій кількості штовхачі, пластини з направляючим пазом у вигляді профільованого вирізу, повзуни та напрямні для переміщення повзунів, причому пластини з направляючим пазом закріплено на рухомій платформі, один кінець штовхача розташований в направляючому пазу відповідної пластини, а інший закріплено на відповідному повзуні, також другий кінець кожної пружини закріплено на відповідному повзуні, а напрямні для переміщення повзунів встановлено на нерухомій опорі, при цьому штовхачами і направляючими пазами пластини утворена у вигляді кулачкового механізму система управління кутом α нахилу осей пружин стискання відносно головної осі опори.
Текст
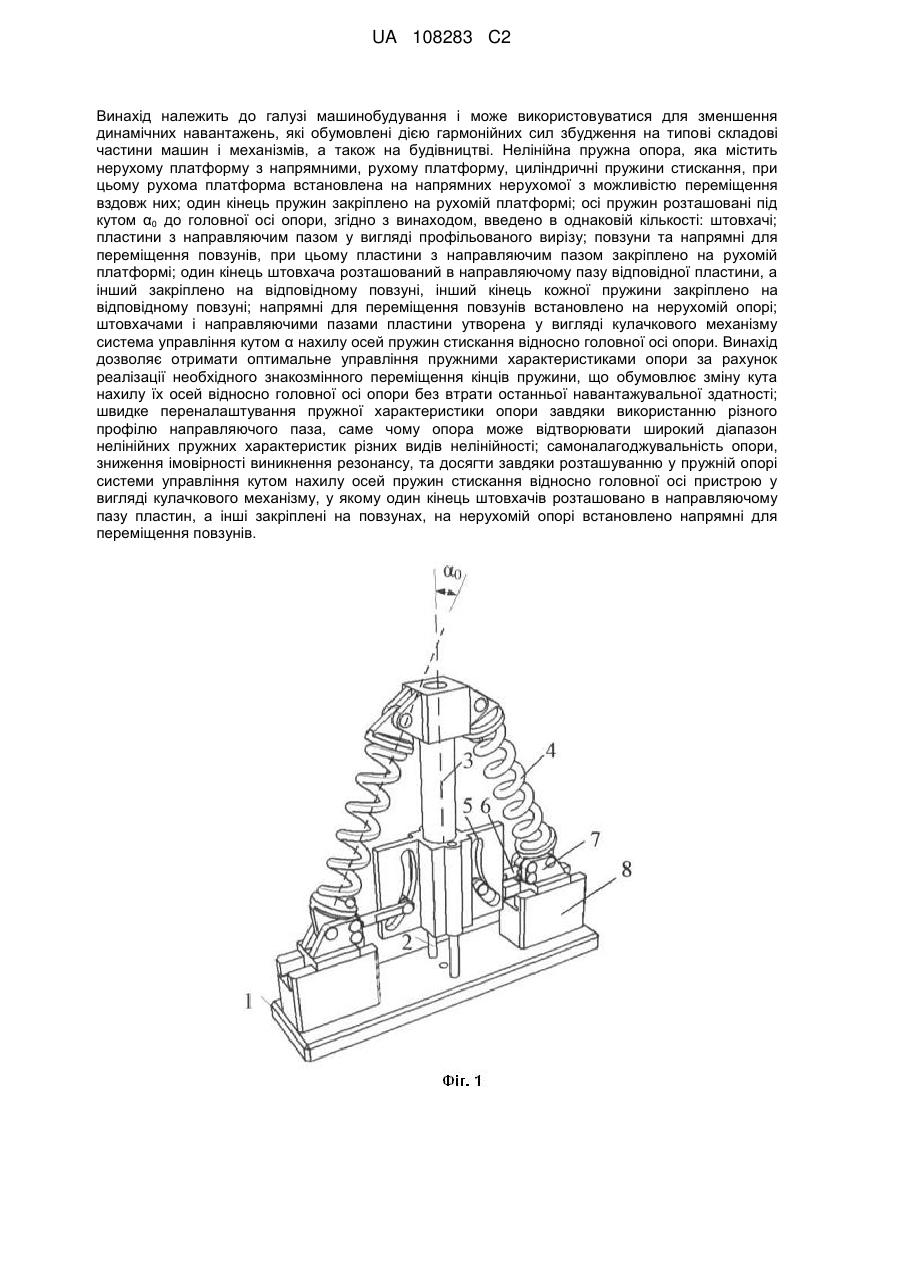
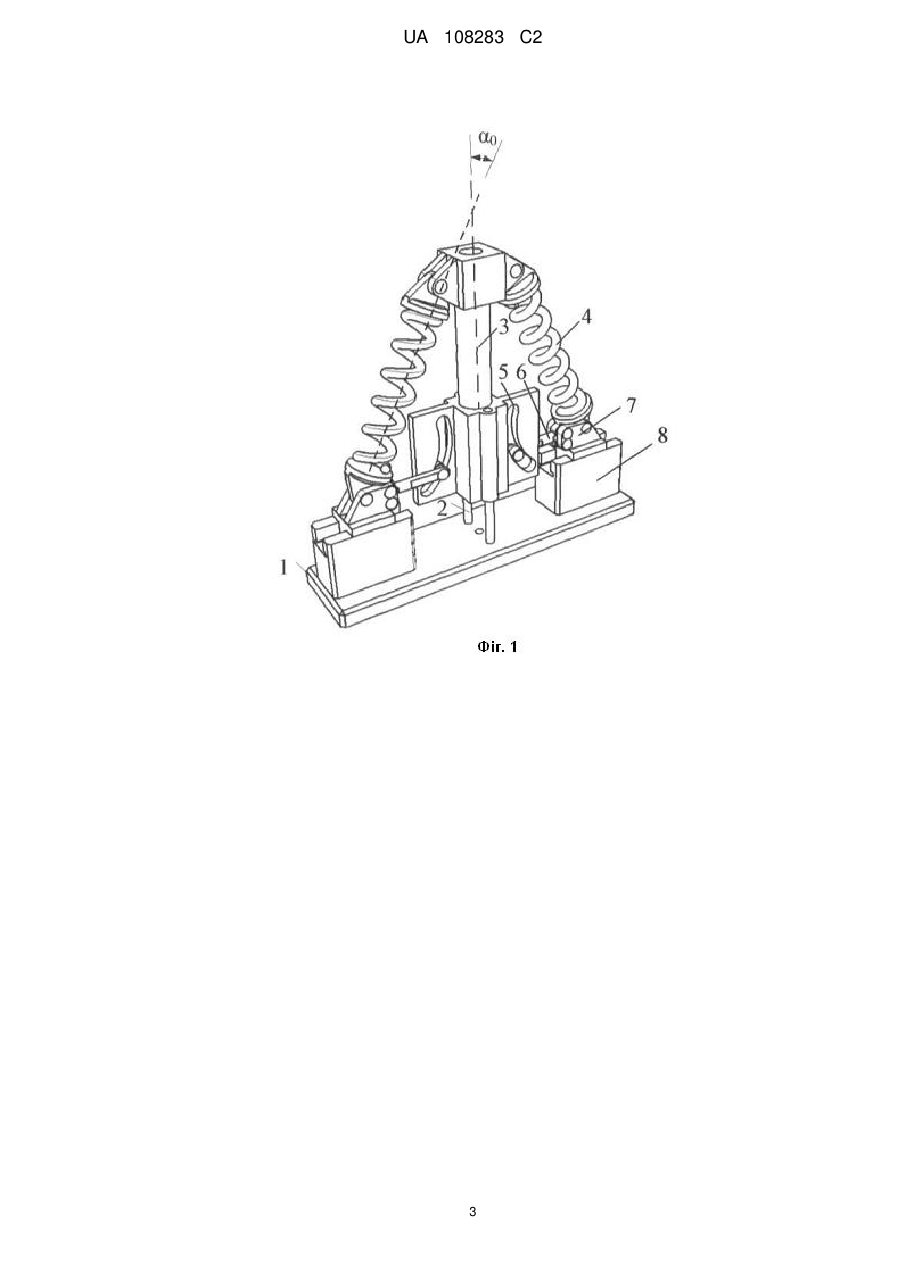
Реферат: (73) Власник(и): ОДЕСЬКИЙ НАЦІОНАЛЬНИЙ ПОЛІТЕХНІЧНИЙ УНІВЕРСИТЕТ, пр. Шевченка, 1, м. Одеса, 650044 (UA) (56) Перелік документів, взятих до уваги експертизою: UA 29327 А, 16.10.2000 UA 41553 С2, 15.12.2004 JP 2004065963 A, 04.03.2004 FR 2836094 A1, 22.08.2003 RU 2336516 С1, 2010.2008 CN 201215152 Y, 01.04.2009 Управление жесткостью механических систем при помощи виброизолирующих устройств с обратной связью. Сидоренко И. И. // Труды Одесского политехнического универститета. - 2005. - Вып. 2(24) - С. 3034. Нелінійний динамічний вібропогашувач з механічним зворотним зв’язком. Сидоренко І.І., Гутиря С.С., Атмажов С.В. // Труды Одесского политехнического универститета. - 2010. - Вып. 1(33) - 2(34) С. 28-31. Пружна муфта з нелінійним механічним зворотним зв’язком. Сидоренко І.І., Курган В.О. // Праці Одеського політехнічного универститету. - 2011. - Вип. 2(36) - С. 3744. Використання пасивного пружного пристрою з механічним пружним зв’язком як пружинного динамічного погашувача коливань. Сидоренко І.І., Ткачьов А.В., Ткачов О.А.// Праці Одеського політехнічного универститету. - 2012. - Вип. 2(39) - С .21-27. Синтез пасивного виброизолирующего устройства на основе модифицированного графа. Сидоренко И. И. // Проблеми обчислювальної механіки і міцності конструкцій. - 2009 .- Вип. 13 - С. 200-206. Саморегулируемая упругая опора. Сидоренко И. И. // Енергетика. - 2007. - С. 86-94. UA 108283 C2 (12) UA 108283 C2 Винахід належить до галузі машинобудування і може використовуватися для зменшення динамічних навантажень, які обумовлені дією гармонійних сил збудження на типові складові частини машин і механізмів, а також на будівництві. Нелінійна пружна опора, яка містить нерухому платформу з напрямними, рухому платформу, циліндричні пружини стискання, при цьому рухома платформа встановлена на напрямних нерухомої з можливістю переміщення вздовж них; один кінець пружин закріплено на рухомій платформі; осі пружин розташовані під кутом α0 до головної осі опори, згідно з винаходом, введено в однаковій кількості: штовхачі; пластини з направляючим пазом у вигляді профільованого вирізу; повзуни та напрямні для переміщення повзунів, при цьому пластини з направляючим пазом закріплено на рухомій платформі; один кінець штовхача розташований в направляючому пазу відповідної пластини, а інший закріплено на відповідному повзуні, інший кінець кожної пружини закріплено на відповідному повзуні; напрямні для переміщення повзунів встановлено на нерухомій опорі; штовхачами і направляючими пазами пластини утворена у вигляді кулачкового механізму система управління кутом α нахилу осей пружин стискання відносно головної осі опори. Винахід дозволяє отримати оптимальне управління пружними характеристиками опори за рахунок реалізації необхідного знакозмінного переміщення кінців пружини, що обумовлює зміну кута нахилу їх осей відносно головної осі опори без втрати останньої навантажувальної здатності; швидке переналаштування пружної характеристики опори завдяки використанню різного профілю направляючого паза, саме чому опора може відтворювати широкий діапазон нелінійних пружних характеристик різних видів нелінійності; самоналагоджувальність опори, зниження імовірності виникнення резонансу, та досягти завдяки розташуванню у пружній опорі системи управління кутом нахилу осей пружин стискання відносно головної осі пристрою у вигляді кулачкового механізму, у якому один кінець штовхачів розташовано в направляючому пазу пластин, а інші закріплені на повзунах, на нерухомій опорі встановлено напрямні для переміщення повзунів. UA 108283 C2 5 10 15 20 25 30 35 40 45 50 55 60 Запропонований винахід належить до машинобудування і може використовуватися для зменшення динамічних навантажень на типові складові частини машин і механізмів, які обумовлені дією гармонійних сил збудження, а також на будівництві. Відома пружна опора, що містить платформи - нерухому з напрямними і рухому, та циліндричні пружини стискання, при цьому рухома платформа встановлена на напрямних з можливістю переміщення вздовж них; осі пружин паралельні головній осі опори; один кінець кожної пружини закріплено на рухомій платформі, а інші - на нерухомій [1]. Недоліки: постійна жорсткість між циліндричними пружинами стискання не дозволяє використання пружної опори у широкому діапазоні частот збудження, оскільки постійна жорсткість пристрою при деяких умовах може стати причиною негативного прояву коливань у вигляді резонансу. Найбільш близьким по технічній суті і досягуваному результату є пружна опора, що містить платформи – нерухому з напрямними і рухому, основні та додаткові циліндричні пружини стискання, при цьому рухома платформа встановлена на напрямних з можливістю переміщення вздовж них; вісь основної пружини паралельна осі опори, а осі додаткових пружин розташовані під деяким кутом до неї; один кінець кожної пружини закріплено на рухомій платформі, а інші – на нерухомій. Недоліки прототипу - утворення пружного зв'язку між рухомою і нерухомою платформою шляхом встановлення основної і додаткових циліндричних пружин стискання, один кінець яких закріплено на рухомій платформі, інший на нерухомій, при цьому вісь основної пружини співпадає з головною віссю опори, а осі додаткових пружин складають з головною віссю опори деякий кут, призводить до зміни останнього при навантаженні пристрою лише у сторону збільшення, і тому реалізована нелінійна пружна характеристика, яка зазвичай обумовлює кубічну залежність між величиною навантаження, прикладеної до рухомої платформи і її переміщенням відносно нерухомої (характеристика Дюфінговського типу), це дозволяє застосовувати таку пружну опору лише у визначеному діапазоні частот збудження однієї гармоніки; втрата додатковими пружинами навантажувальної здатності характеризує пристрій як пристрій вузької області використання [2]. Задачею винаходу є створення нелінійної пружної опори, в якій шляхом введення штовхачів, пластин з направляючими пазами для штовхачів і повзунів з власними напрямними, поліпшено експлуатаційні властивості, реалізовано нелінійні пружні характеристики різного виду нелінійності з кращими робочими характеристиками у ширшому частотному діапазоні, забезпечена самоналагоджувальність опори при визначеній зміні її жорсткості, як наслідок, поширено область використання опори. Поставлена задача вирішується тим, що у нелінійну пружну опору, яка містить нерухому платформу з напрямними, рухому платформу, циліндричні пружини стискання, при цьому рухома платформа встановлена на напрямних нерухомої з можливістю переміщення вздовж них; один кінець пружин закріплено на рухомій платформі; осі пружин розташовані під кутом а 0 до головної осі опори, згідно з винаходом, введено в однаковій кількості: штовхачі; пластини з направляючим пазом у вигляді профільованого вирізу; повзуни та напрямні для переміщення повзунів, при цьому пластини з направляючим пазом закріплено на рухомій платформі; один кінець штовхача розташований в направляючому пазу відповідної пластини, а інший закріплено на відповідному повзуні, інший кінець кожної пружини закріплено на відповідному повзуні; напрямні для переміщення повзунів встановлено на нерухомій опорі; штовхачами і направляючими пазами пластини утворена у вигляді кулачкового механізму система управління кутом α нахилу осей пружин стискання відносно головної осі опори. Технічний ефект полягає у: можливості оптимального управління пружними характеристиками опори за рахунок реалізації необхідного знакозмінного переміщення кінців пружини, що обумовлює зміну кута нахилу їх осей відносно головної осі опори без втрати останньої навантажувальної здатності; швидкому переналаштуванню пружної характеристики опори завдяки використанню різного профілю направляючого паза, саме чому опора може відтворювати широкий діапазон нелінійних пружних характеристик різних видів нелінійності; самоналагоджувальності опори, зниження імовірності виникнення резонансу, та досягається завдяки розташуванню у пружній опорі системи управління кутом нахилу осей пружин стискання відносно головної осі пристрою у вигляді кулачкового механізму, у якому один кінець штовхачів розташовані в направляючому пазу пластин, а інші закріплені на повзунах, на нерухомій опорі встановлено напрямні для переміщення повзунів. Суть винаходу пояснюється кресленнями, де на фіг. 1 зображено загальний вид пружної опори, яка містить нерухому платформу 1 з напрямними 2 для переміщення вздовж них рухомої платформи 3, циліндричні пружини стискання 4, один кінець кожної закріплений на рухомій 1 UA 108283 C2 5 10 15 20 25 30 платформі 3, а інші на відповідних повзунах, осі яких складають з головною віссю опори кут α 0 пластини 5 з направляючим пазом, штовхачі 6, один кінець кожного розташований в направляючому пазу відповідної пластини 5; повзуни 7, кожний встановлено з можливістю переміщення вздовж власних напрямних 8, закріплених на нерухомій платформі 1. Пристрій працює таким чином (Фіг. 2): встановлена на нерухомій 1 платформі на напрямних 2, рухома 3 платформа під дією навантаження переміщується на відстань х. Циліндричні пружини стискання 4 закріплені одним кінцем на рухомій платформі 3, а іншим на відповідних повзунах, деформуються зі зміною кута α0 нахилу пружин 4 відносно головної осі опори. Направляючий паз пластин 5, жорстко закріплених на рухомій платформі 1, контактують з одним кінцем штовхачів 6, інші кінці яких закріплені на повзунах 7, це обумовлює переміщення повзунів 7, закріплених на них одних кінців пружин стискання 4 на величину у(х), вздовж власних напрямних 8, встановлених на нерухомій платформі 2. Величина і знакозмінний напрямок переміщення у(х) кінців пружин стискання 4, закріплених на повзуні 7, залежить від профілю напрямного паза пластин 5, величини і напрямку вертикального переміщення x, пов'язаного з одним з його кінців рухомої платформи 1. Приклад застосування: під дією навантаження F рухома 3 платформа, встановлена на нерухомій 1 платформі на напрямних 2, переміщується на відстань х. Циліндричні пружини стискання 4, закріплені одним кінцем на рухомій платформі 3, а іншим на відповідних повзунах, деформуються зі зміною кута α нахилу пружин 4 відносно головної осі опори, тобто: α=α0+α(х)±α(у(х)), де α(х) - геометрична зміна кута між головною віссю опори і осями пружин стискання 4, пов'язана з їх початковою орієнтацією і їх деформацією x у опорі; α(у(х)) - знакозмінний кут між головною віссю опори і осями пружин стискання 4, зміна якого пов'язана з напрямком і величиною переміщення у(х) кінця пружини стискання 4, закріпленої на повзуні 7. Направляючі пази пластин 5, жорстко закріплених на рухомій платформі 1, контактують з одним кінцем штовхачів 6, інші кінці яких закріплені на повзунах 7, це обумовлює переміщення останніх і закріплених на них одних кінців пружин стискання 4 на величину у(х), вздовж власних напрямних 8, встановлених на нерухомій платформі 2 Застосування запропонованого конструктивного рішення дозволить поліпшити експлуатаційні властивості пружної опори і розширити область її застосування: реалізувати нелінійні пружні характеристики різного виду нелінійності; значно знизити динамічні навантаження; скоротити час і кількість циклів коливань механізмів у перехідних режимах роботи. 35 40 Джерела інформації: 1. Заблонский К.И. Детали машин / К.И. Заблонский. - К.: Вища шк. головне изд-во, 1985. 518 с. 2. Алабужев П.М. Виброзащитные системы с квазинулевой жесткостью / Алабужев П.М., Гритчин А.А., Ким И.И. - Л.: Машиностроение, 1986. - 96 с. ФОРМУЛА ВИНАХОДУ 45 50 55 Нелінійна пружна опора, яка містить нерухому платформу з напрямними, рухому платформу та циліндричні пружини стискання, при цьому рухома платформа встановлена на напрямних нерухомої з можливістю переміщення вздовж них, а один кінець пружин закріплено на рухомій платформі, а осі пружин розташовані під кутом α0 до головної осі опори, яка відрізняється тим, що має в однаковій кількості штовхачі, пластини з направляючим пазом у вигляді профільованого вирізу, повзуни та напрямні для переміщення повзунів, причому пластини з направляючим пазом закріплено на рухомій платформі, один кінець штовхача розташований в направляючому пазу відповідної пластини, а інший закріплено на відповідному повзуні, також другий кінець кожної пружини закріплено на відповідному повзуні, а напрямні для переміщення повзунів встановлено на нерухомій опорі, при цьому штовхачами і направляючими пазами пластини утворена у вигляді кулачкового механізму система управління кутом α нахилу осей пружин стискання відносно головної осі опори. 2 UA 108283 C2 3 UA 108283 C2 Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16F 1/22
Мітки: опора, нелінійна, пружна
Код посилання
<a href="https://ua.patents.su/6-108283-nelinijjna-pruzhna-opora.html" target="_blank" rel="follow" title="База патентів України">Нелінійна пружна опора</a>
Пружна опора

Номер патенту: 103840
Опубліковано: 25.11.2013
Автори: Сидоренко Ігор Іванович, Ткачов Анатолій Вікторович, Ткачьов Олексій Анатолійович
МПК: F16F 1/22
Формула / Реферат:
Пружна опора, яка містить рухому і нерухому платформи, які з'єднані з можливістю переміщення одна відносно іншої вздовж напрямних, закріплених на нерухомій платформі, між якими для утворення зведеного пружного зв'язку встановлено циліндричні пружини стискання, один кінець яких закріплений на рухомій платформі, осі яких розташовані під деяким кутом до головної осі опори, яка відрізняється тим, що введено щонайменше один важіль та щонайменше...
Пружна опора одномасового вібраційного конвеєра
Номер патенту: 29327
Опубліковано: 16.10.2000
Автор: Свистун Леонід Андрійович
МПК: B65G 27/00
Мітки: опора, пружна, вібраційного, конвеєра, одномасового
Формула / Реферат:
Пружна опора одномасового вібраційного конвеєра, яка містить кронштейн, пружно з'єднаний з основою, яка відрізняється тим, що вона обладнана нерухомим упором жорстко прикріпленим до основи, і регульованими упорами, при цьому пружний зв'язок кронштейна з основою виконаний у вигляді вільно установлених на осях шатунів і пружних елементів розташованих між нерухомим упором і регульованими упорами кронштейна в напрямку коливань конвеєра.
Пружна опора
Номер патенту: 1718
Опубліковано: 25.10.1994
Автор: Рахманов Микола Миколайович
МПК: F16F 7/00
Формула / Реферат:
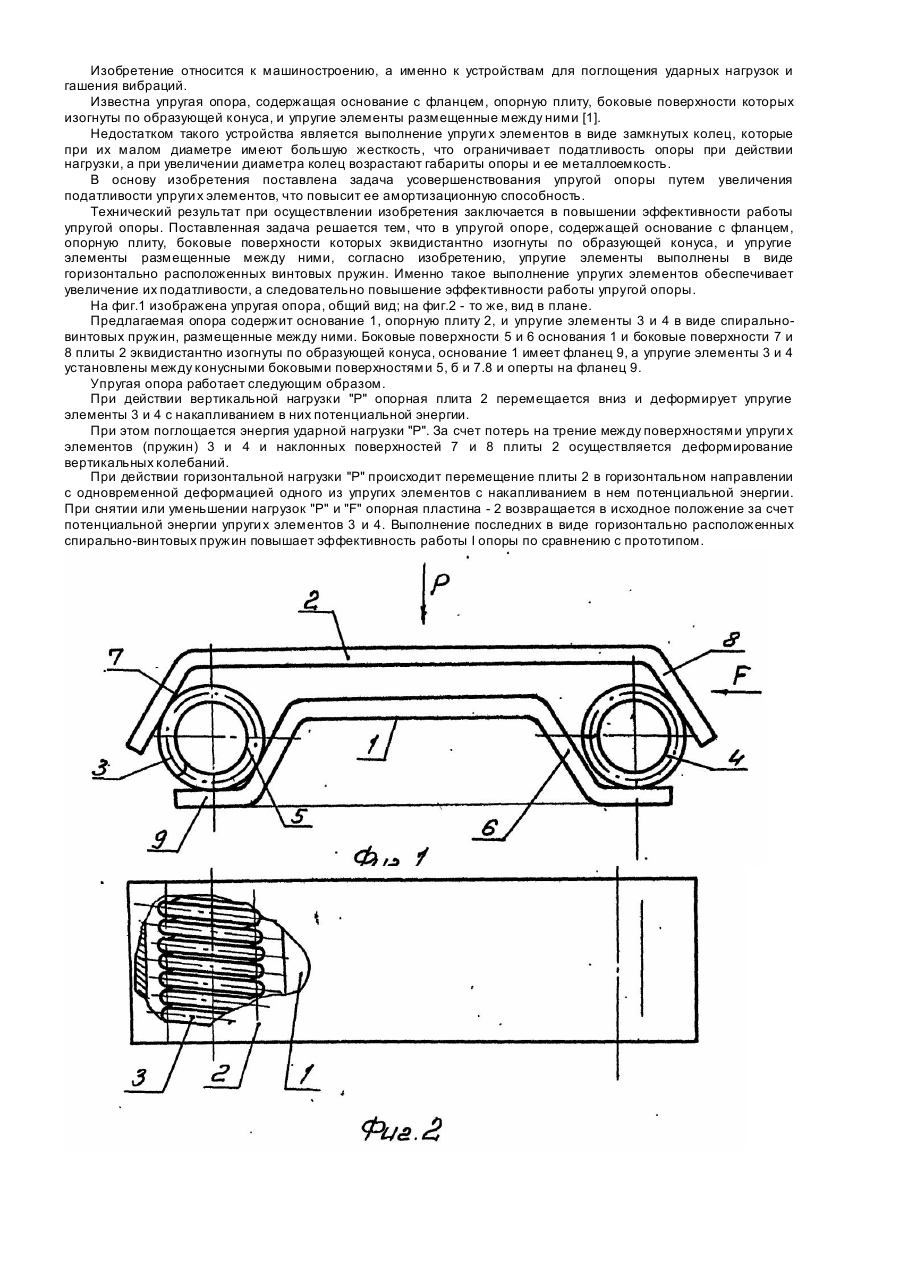
Упругая опора, содержащая основание с фланцем, опорную плиту, боковые поверхности которых эквидистантно изогнуты по образующей конуса, и упругие элементы, размещенные между ними, отличающаяся тем, что упругие элементы выполнены в виде горизонтально расположенных винтовых пружин.
Анізотропно-ротаційно-пружна опора
Номер патенту: 54142
Опубліковано: 25.10.2010
Автор: Чугуй Володимир Леонідович
МПК: F03G 1/00
Мітки: опора, анізотропно-ротаційно-пружна
Формула / Реферат:
Анізотропно-ротаційно-пружна опора, що містить нерухому основу з установленою упорною підшипниковою опорою, нею підтримуваний вал, крім того на валу встановлена друга упорна підшипникова опора, нею підтримувана плита, яка відрізняється тим, що вал з'єднаний з осями тіл кочення, а вони обперті об бігову доріжку, виконану у вигляді набору секторів, кожний з яких зв'язаний індивідуальним пружним елементом з основою, крім того, плита зв'язана з...
Пружна опора для вібраційних пристроїв
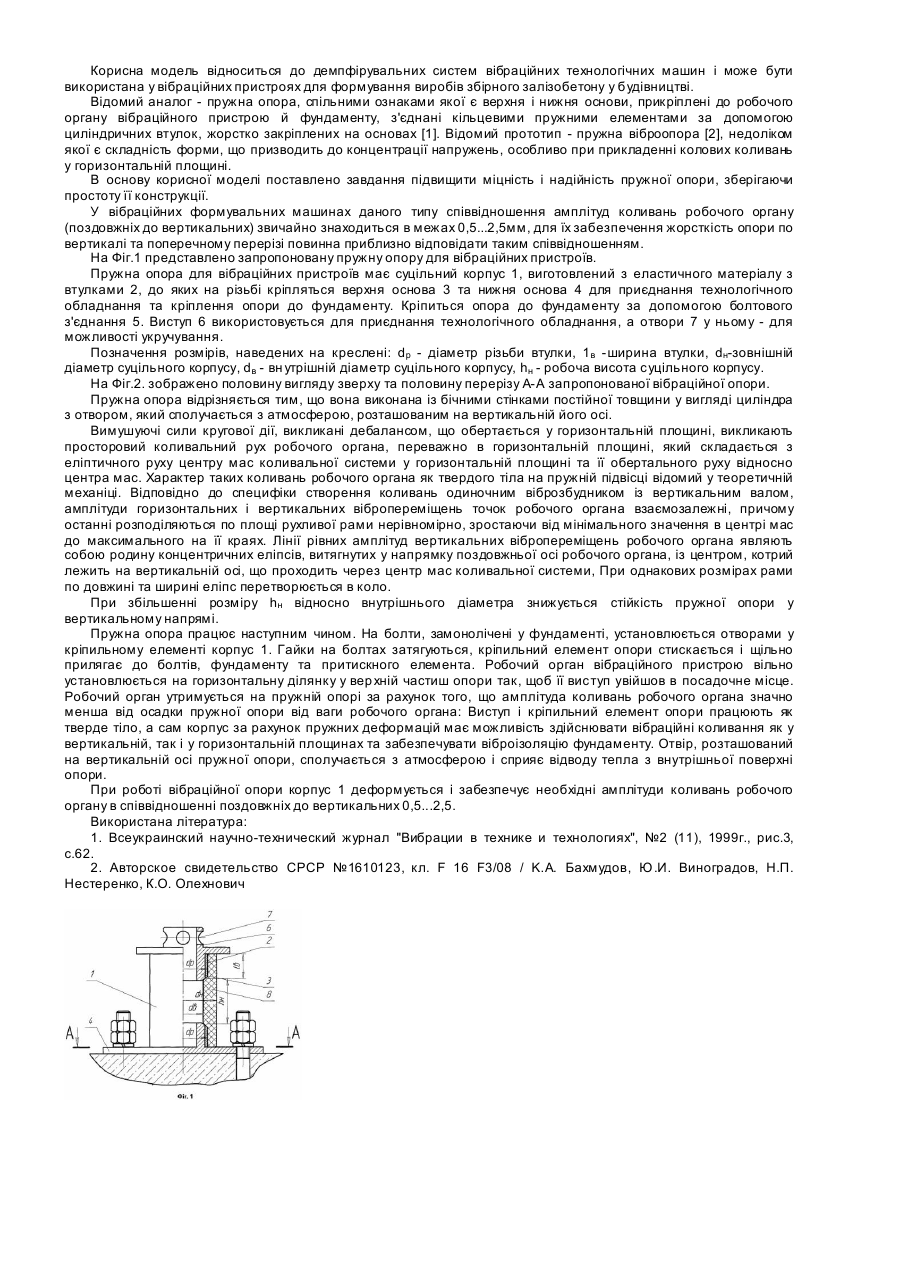
Номер патенту: 23325
Опубліковано: 25.05.2007
Автори: Нестеренко Микола Миколайович, Нестеренко Микола Петрович, Скляренко Тарас Олександрович
МПК: F16F 3/00
Мітки: опора, пружна, вібраційних, пристроїв
Формула / Реферат:
Пружна опора для вібраційних пристроїв, що містить суцільний корпус, виготовлений з еластичного матеріалу, з верхньою та нижньою основами для приєднання технологічного обладнання та кріплення опори до фундаменту, яка відрізняється тим, що виконана з бічними стінками постійної товщини у вигляді циліндра з отвором, що сполучається з атмосферою, розташованим на вертикальній його осі, через який здійснюють відведення тепла, причому співвідношення...