Спосіб та цифрова система спостереження для визначення та компенсації впливів неврівноваженості навантаження на роботу систем спостереження та приводів
Номер патенту: 108845
Опубліковано: 25.06.2015
Автори: Віноградов Сєргєй Міхайловіч, Кірячок Гєннадій Вітальєвіч, Ботєновскій Сєргєй Лєонідовіч, Гончарук Ігорь Анатольєвіч, Лєднік Гєннадій Васільєвіч, Шихов Алєксєй Алєксандровіч, Стріжнєв Алєксандр Гавріловіч
Формула / Реферат
1. Спосіб визначення та компенсації впливів неврівноваженості навантаження на точність роботи систем спостереження чи приводів, згідно з яким для визначення зазначених впливів використовують систему, яку переводять у тестовий режим спостереження, на вхід подають лінійно-змінні з постійною малою швидкістю по всьому діапазону робочих кутів для двох напрямків руху навантаження перевірні керуючі сигнали, в процесі функціонування оцінюють вплив неврівноваженості навантаження на точність спостереження, шляхом вимірювань і графічних відображень поточних змін помилок спостереження в функції кутів повороту навантаження, які в подальшому представляють і запам'ятовують у вигляді аналітичних виразів, для компенсації виявлених впливів неврівноваженості навантаження на контури систем спостереження або приводів вносять компенсаційні сигнали, які обчислюють за допомогою аналітичних виразів, які запам'ятали, для чого використовують сигнали кутового положення навантаження і знак поточної помилки неузгодженості, причому для здійснення більш повної компенсації впливів неврівноваженості навантаження компенсаційні сигнали можуть містити поправкові коефіцієнти, які підбирають при налаштуванні.
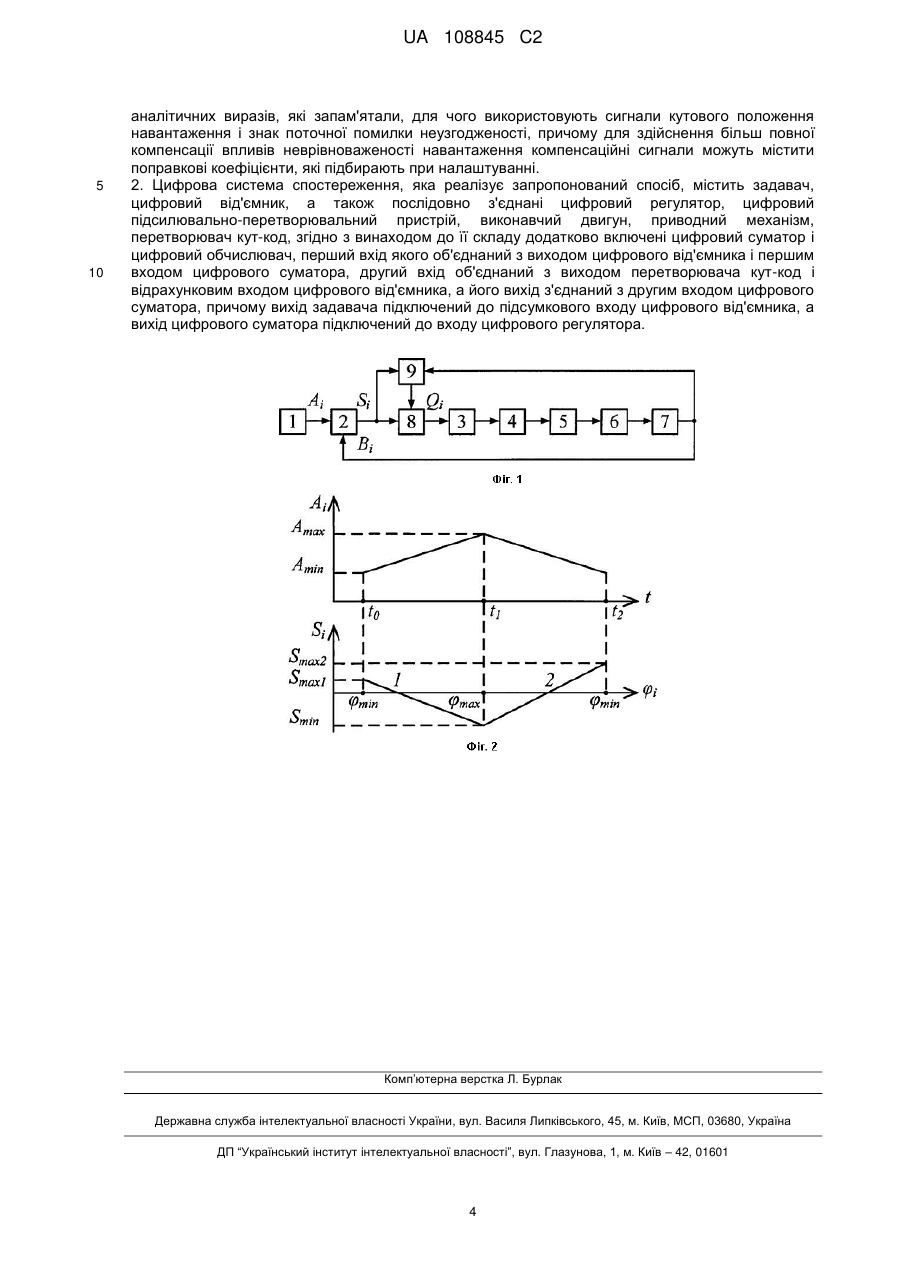
2. Цифрова система спостереження, яка реалізує запропонований спосіб, містить задавач, цифровий від'ємник, а також послідовно з'єднані цифровий регулятор, цифровий підсилювально-перетворювальний пристрій, виконавчий двигун, приводний механізм, перетворювач кут-код, згідно з винаходом до її складу додатково включені цифровий суматор і цифровий обчислювач, перший вхід якого об'єднаний з виходом цифрового від'ємника і першим входом цифрового суматора, другий вхід об'єднаний з виходом перетворювача кут-код і відрахунковим входом цифрового від'ємника, а його вихід з'єднаний з другим входом цифрового суматора, причому вихід задавача підключений до підсумкового входу цифрового від'ємника, а вихід цифрового суматора підключений до входу цифрового регулятора.
Текст
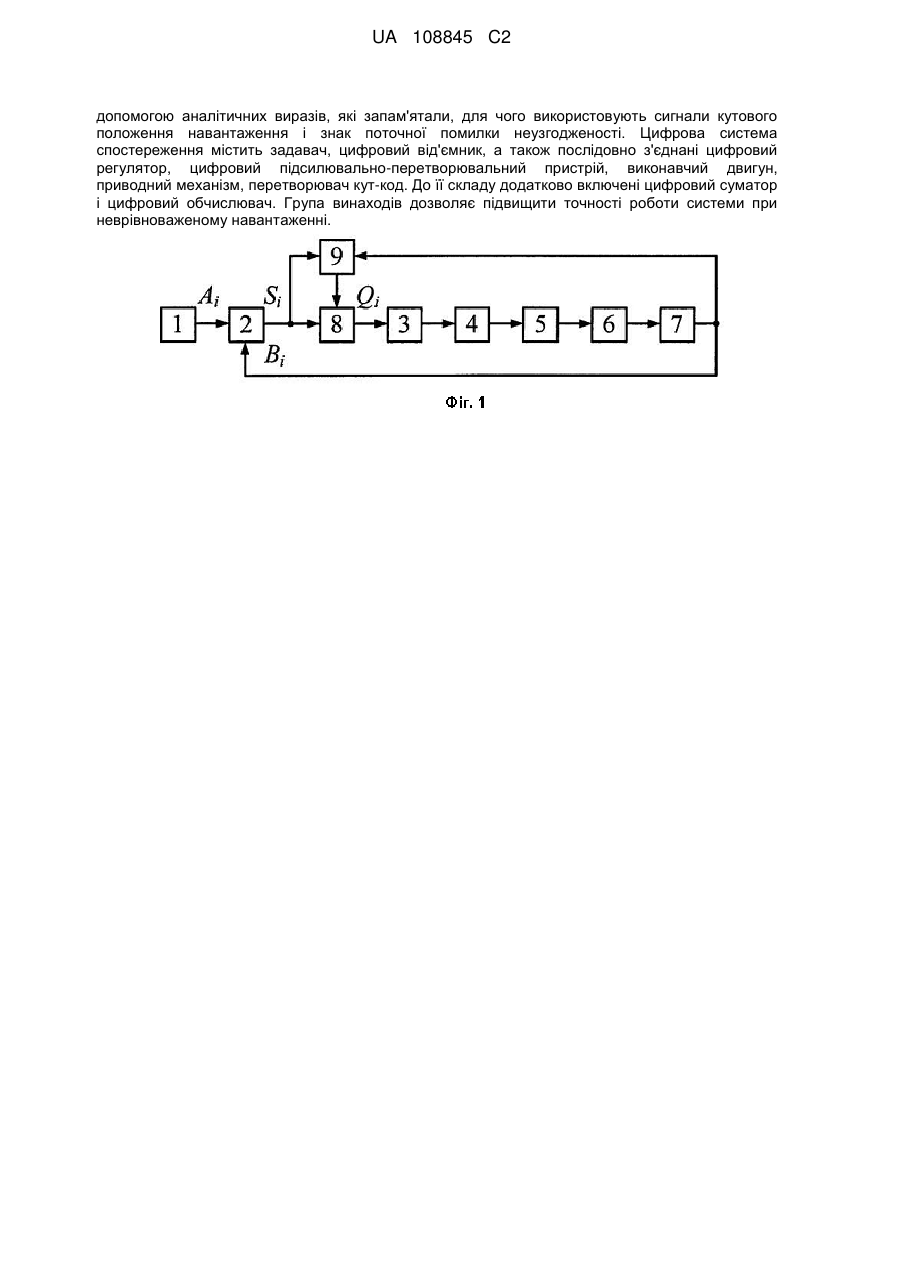
Реферат: Винахід належить до області автоматики та обчислювальної техніки і може бути використаний для побудови цифрових систем спостереження, зокрема для спостереження за рухомими об'єктами радіолокаційними антенними системами, оптичними телевізійними установками. Спосіб визначення та компенсації впливів неврівноваженості навантаження на точність роботи систем спостереження чи приводів, згідно з яким для визначення зазначених впливів використовують систему, яку переводять у тестовий режим спостереження, на вхід подають лінійно-змінні з постійною малою швидкістю по всьому діапазону робочих кутів для двох напрямків руху навантаження перевірні керуючі сигнали. В процесі функціонування оцінюють вплив неврівноваженості навантаження на точність спостереження, шляхом вимірювань і графічних відображень поточних змін помилок спостереження в функції кутів повороту навантаження, які в подальшому представляють і запам'ятовують у вигляді аналітичних виразів. Для компенсації виявлених впливів неврівноваженості навантаження на контури систем спостереження або приводів вносять компенсаційні сигнали, які обчислюють за UA 108845 C2 (12) UA 108845 C2 допомогою аналітичних виразів, які запам'ятали, для чого використовують сигнали кутового положення навантаження і знак поточної помилки неузгодженості. Цифрова система спостереження містить задавач, цифровий від'ємник, а також послідовно з'єднані цифровий регулятор, цифровий підсилювально-перетворювальний пристрій, виконавчий двигун, приводний механізм, перетворювач кут-код. До її складу додатково включені цифровий суматор і цифровий обчислювач. Група винаходів дозволяє підвищити точності роботи системи при неврівноваженому навантаженні. UA 108845 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до способу виявлення конструктивних недоліків цифрових систем спостереження для визначення та компенсації впливів неврівноваженості навантаження на роботу систем спостереження та приводів в області автоматики та обчислювальної техніки і може бути використаний для підвищення точності роботи систем спостереження та приводів, які мають неврівноваженість навантаження. Відомі способи визначення механічної неврівноваженості навантаження в системах з негативним зворотним зв'язком. Ці способи полягають у використанні інформації від давачів моменту або положення навантаження при формуванні керуючих сигналів системи (А.С. №2145724, МПК G05B11/01, В66В1/30; А.С. №2318232, МПК G05B11/01; А.С. №2318233, МПК G05B11/01). Для реалізації відомих способів використовують системи спостереження, із застосуванням додаткових давачів моменту або положення навантаження, що дозволяють визначити момент неврівноваженості навантаження безпосередньо чи опосередковано через положення і орієнтацію навантаження щодо осі обертання. Недоліками відомих способів визначення механічної неврівноваженості навантаження є складність і важкість налаштування систем, в яких вони використовуються, тому що при високій чутливості додаткових давачів робота систем стає нестійкою, а при низькій чутливості давачів знижується їх точність роботи. Відомі способи визначення статичної та динамічної неврівноваженості навантаження. (Левіт М.Є., Риженков В.М. Балансування деталей та вузлів. - М.: Машинобудування, 1986.-248 с., іл.; Довідник з балансування / М.Є.Левіт, Ю.А.Агафонов, Л.Д.Вайнгортін та інші; Під загал, ред. М.Є.Левіта. - М.: Машинобудування, 1992.-464 с., іл.). Ці способи відрізняються від попередніх тим, що додаткове обладнання і давачі застосовують тільки на стадії виготовлення механізмів і деталей. Недоліками цих способів визначення і усунення неврівноваженості навантаження є необхідність мати спеціальне обладнання і контрольно-вимірювальну апаратуру, а також велика трудомісткість вимірювальних і налаштованих робіт. Все це не дозволяє використовувати відомі технічні рішення як прототип способу. Найбільш близькою до винаходу по технічній суті є цифрова система спостереження, яка містить задавач, цифровий від'ємник, цифро-аналоговий перетворювач, підсилювальноперетворювальний пристрій, виконавчий двигун, редуктор і перетворювач кут-код (Теорія автоматичного керування. / Під ред. Нетушил. - М.: "Вища школа », 1976. – С. 285 - прототип системи спостереження). Недоліком відомої цифрової системи спостереження є низька точність роботи системи при неврівноваженому навантаженні. Задачею винаходу є спрощення налаштування і підвищення точності роботи систем спостереження і приводів, що мають неврівноваженість навантаження без застосування додаткових давачів і спеціального обладнання. Визначити неврівноваженість статичного навантаження і компенсувати її вплив пропонується способом, який описаний нижче. Ця задача згідно із запропонованим способом вирішується таким чином, що для визначення впливів неврівноваженості навантаження на точність роботи систем стеження чи приводів використовують саму систему, яку переводять в тестовий режим спостереження, на вхід подають лінійно-змінні з постійною малою швидкістю по всьому діапазону робочих кутів для двох напрямків руху навантаження перевірні керуючі сигнали, в процесі функціонування оцінюють вплив неврівноваженості навантаження на точність спостереження, шляхом вимірювань і графічних відображень поточних змін помилок спостереження у функції кутів повороту навантаження, які в подальшому представляють і запам'ятовують у вигляді аналітичних виразів, для компенсації виявлених впливів неврівноваженості навантаження на контури систем спостереження чи приводів вносять компенсаційні сигнали, які обчислюють за допомогою аналітичних виразів, які запам'ятали, для чого використовують сигнали кутового положення навантаження і знак поточної помилки неузгодженості, причому для здійснення більш повної компенсації впливів неврівноваженості навантаження компенсаційні сигнали можуть містити поправкові коефіцієнти, які підбирають при налаштуванні. Цифрова система спостереження, яка реалізує запропонований спосіб, містить задавач, цифровий від'ємник, а також послідовно з'єднані цифровий регулятор, цифровий підсилювально-перетворювальний пристрій, виконавчий двигун, приводний механізм, перетворювач кут-код, згідно з винаходом до її складу додатково включені цифровий суматор і цифровий обчислювач, перший вхід якого об'єднаний з виходом цифрового від'ємника і першим входом цифрового суматора, другий вхід об'єднаний з виходом перетворювача кут-код і входом 1 UA 108845 C2 5 10 15 20 25 30 35 40 цифрового від'ємника, який відраховується, а його вихід з'єднаний з другим входом цифрового суматора, причому вихід задавача підключений до підсумкового входу цифрового від'ємника, а вихід цифрового суматора підключений до входу цифрового регулятора. Запропонована цифрова система спостереження може бути використана для визначення впливу неврівноваженості навантаження і компенсації цього впливу вищезазначеним способом. Причому цифровий обчислювач обчислює компенсаційні сигнали, а цифровий суматор вносить їх у контур системи спостереження. Можливі й інші варіанти внесення компенсаційних сигналів в контури систем спостереження і приводів. Запропонований спосіб може бути використаний у будь-якій системі спостереження або приводі будь-якого типу. Далі винахід буде детально пояснений з посиланнями на що докладалися креслення, на яких зображені: на фіг. 1 - функціональна схема цифрової системи спостереження, що реалізує запропонований спосіб; на фіг. 2 - діаграми, що пояснюють суть реалізації цього способу при визначенні та компенсації впливів неврівноваженості навантаження для прямого і зворотного напрямів спостереження. Цифрова система спостереження містить послідовно з'єднані задавач 1, цифровий від'ємник 2, цифровий суматор 8, цифровий регулятор 3, цифровий підсилювальноперетворювальний пристрій 4, виконавчий двигун 5, приводний механізм 6, перетворювач 7 куткод, цифровий обчислювач 9, вихід якого підключений до другого входу цифрового суматора 8, а перший і другий входи відповідно підключені до виходів цифрового від'ємника 2 і перетворювача 7 кут-код, вихід якого підключений до другого входу цифрового від'ємника 2. Система працює наступним чином. Задавач 1 виробляє керуючий сигнал A i у вигляді цифрового коду, який надходить на підсумковий вхід цифрового від'ємника 2, де з керуючого сигналу відраховується сигнал B i , який надходить з перетворювача 7 кут-код. Сигнал різниці S i , який отримали у цифровому від'ємнику 2 по формулі Si Ai Bi , надходить через цифровий суматор 8 на цифровий регулятор 3. Цифровий регулятор З забезпечує необхідні динамічні показники системи і формує сигнали управління для цифрового підсилювально-перетворювального пристрою 4. Пристрій 4 посилює і, якщо необхідно, перетворює ці сигнали в напруги, необхідні для управління виконавчим двигуном 5. Двигун 5 через приводний механізм 6 повертає перетворювач 7 кут-код на такий кут, при якому Si 0 . При роботі цифрової системи спостереження в діапазоні робочих кутів і за наявності неврівноваженості навантаження, що діє на приводний механізм, помилка спостереження не залишається постійною, а змінюється. Величина помилки спостереження залежить не тільки від швидкості спостереження, але і від характеру неврівноваженості навантаження. Балансування навантаження за допомогою механічних пристроїв є досить важким, а часом і не здійсненним завданням. Досить просто можна вирішити це завдання шляхом компенсації. Спочатку необхідно визначити закон зміни помилки спостереження як функцію кута повороту навантаження, для чого пропонується використовувати саму цифрову систему спостереження, яку переводять у тестовий режим спостереження. За допомогою задавача 1 формують керуючий сигнал A i лінійно - змінних з постійною малою швидкістю по всьому діапазону робочих сигналів у двох напрямках руху від Amin до Amax та від Amax до Amin . Причому зміна керуючого сигналу A i у двох напрямках руху є істотним і обов'язковим, особливо 45 для систем, що працюють у кутоподібній площині. Графік зміни керуючого сигналу A i для двох напрямків руху, які зображені на фіг. 2. Цей керуючий сигнал подають на вхід системи та в процесі її роботи записують поточні значення помилки S i та кута i повороту навантаження. Використовуючи отримані дані, будують графіки залежностей поточної помилки S i у функції кута повороту i . 50 Закон зміни поточної помилки S i у функції кута повороту i може бути будь-яким і, як приклад, він зображений на фіг. 2 у вигляді лінійних функцій 1 і 2. 2 UA 108845 C2 В діапазоні кутів min...max цей закон (лінійна функція 1, фіг. 2) може бути представлений у S1 C1 1 , C2 Sn1 C1n1 ; Si1 C1i C2 , де C1 , C2 - постійні коефіцієнти, вигляді рівняння: S1 , 1 - діапазон зміни помилки та кута, S1 Smin Smax 1 , 1 max min ; Sn1 , n1 фіксовані значення помилки і кута (наприклад, Sn1 Smin , n1 max ). 5 Аналогічно для діапазону кутів min...max (лінійна функція 2, фіг.2): Si2 C3i C4 , де C3 , S2 C3 2 , C4 Sn2 C3n2 ; S2 , 2 - діапазон зміни помилки та C4 - постійні коефіцієнти, кута, S2 Smax 2 Smin , 2 min max ; Sn2 , n2 - фіксовані значення помилки і кута Bi i K АЦП K АЦП (наприклад, Sn2 Smax 2 , n2 min ); i - кут повороту навантаження, ; B K АЦП ; B - діапазон зміни коду B i , коефіцієнт перетворення перетворювача 7 кут-код, 10 15 20 25 30 35 40 45 B Bmax Bmin ; - діапазон зміни кута i , max min ; Bmin , Bmax - мінімальне та максимальне значення коду B i , яке відповідає аналогічним значенням кута повороту i . Отримані таким чином закони записують у цифровий обчислювач 9, а систему переводять у штатний режим роботи. Цифровий обчислювач 9 у процесі роботи системи за сигналами перетворювача 7 кут-код обчислює поточні значення сигналів Si1 та Si2 . Сигнали (Si1, Si2 ) надходять на другий вхід цифрового суматора 8. При цьому при негативному знаку сигналу помилки S i , який формує цифровий від'ємник 2, цифровий обчислювач 9 видає сигнал Si1 , а при позитивному - сигнал Si2 . В результаті керуючий сигнал, який подається на вхід цифрового регулятора 3, обчислюють за формулою Q1 Si Si1 де Si 0 , або за формулою Q2 Si Si2 де Si 0 . Після практичної реалізації цього способу потрібно знову перевірити роботу системи в тестовому режимі спостереження за перевірним сигналом (фіг.2) та у разі неповної компенсації керуючий сигнал відповідно обчислюють за формулами: Q1 Si K1Si1 , Q2 Si K 2Si2 , де K1 , K 2 - постійні поправочні коефіцієнти, які підбирають при налаштуванні. Таким чином, реалізація нового способу в запропонованій цифровій системі спостереження та включення додаткових елементів цифрового суматора і цифрового обчислювача дозволяє не тільки визначити вплив неврівноваженості навантаження на точність роботи системи, але й компенсувати помилку спостереження, яка викликана неврівноваженістю навантаження, тим самим підвищити точність роботи системи без застосування додаткових давачів і механічних балансувальних пристроїв, а процедура налаштування системи значно спрощується і зводиться до підбору поправкових коефіцієнтів за необхідністю. Авторами був розроблений, виготовлений та випробуваний повномасштабний діючий макет цифрової системи спостереження для визначення та компенсації впливів неврівноваженості навантаження на точність роботи систем спостереження чи приводів. ФОРМУЛА ВИНАХОДУ 1. Спосіб визначення та компенсації впливів неврівноваженості навантаження на точність роботи систем спостереження чи приводів, згідно з яким для визначення зазначених впливів використовують систему, яку переводять у тестовий режим спостереження, на вхід подають лінійно-змінні з постійною малою швидкістю по всьому діапазону робочих кутів для двох напрямків руху навантаження перевірні керуючі сигнали, в процесі функціонування оцінюють вплив неврівноваженості навантаження на точність спостереження, шляхом вимірювань і графічних відображень поточних змін помилок спостереження в функції кутів повороту навантаження, які в подальшому представляють і запам'ятовують у вигляді аналітичних виразів, для компенсації виявлених впливів неврівноваженості навантаження на контури систем спостереження або приводів вносять компенсаційні сигнали, які обчислюють за допомогою 3 UA 108845 C2 5 10 аналітичних виразів, які запам'ятали, для чого використовують сигнали кутового положення навантаження і знак поточної помилки неузгодженості, причому для здійснення більш повної компенсації впливів неврівноваженості навантаження компенсаційні сигнали можуть містити поправкові коефіцієнти, які підбирають при налаштуванні. 2. Цифрова система спостереження, яка реалізує запропонований спосіб, містить задавач, цифровий від'ємник, а також послідовно з'єднані цифровий регулятор, цифровий підсилювально-перетворювальний пристрій, виконавчий двигун, приводний механізм, перетворювач кут-код, згідно з винаходом до її складу додатково включені цифровий суматор і цифровий обчислювач, перший вхід якого об'єднаний з виходом цифрового від'ємника і першим входом цифрового суматора, другий вхід об'єднаний з виходом перетворювача кут-код і відрахунковим входом цифрового від'ємника, а його вихід з'єднаний з другим входом цифрового суматора, причому вихід задавача підключений до підсумкового входу цифрового від'ємника, а вихід цифрового суматора підключений до входу цифрового регулятора. Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05B 11/01
Мітки: впливів, роботу, визначення, компенсації, система, неврівноваженості, приводів, спостереження, систем, навантаження, цифрова, спосіб
Код посилання
<a href="https://ua.patents.su/6-108845-sposib-ta-cifrova-sistema-sposterezhennya-dlya-viznachennya-ta-kompensaci-vpliviv-nevrivnovazhenosti-navantazhennya-na-robotu-sistem-sposterezhennya-ta-privodiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб та цифрова система спостереження для визначення та компенсації впливів неврівноваженості навантаження на роботу систем спостереження та приводів</a>
Цифрова система компенсації несинхронних імпульсних завад
Номер патенту: 58183
Опубліковано: 15.07.2003
Автори: Чорнобородова Наталя Петрівна, Часовський Валентин Олександрович, Чорнобородов Михайло Петрович
МПК: G01S 7/36
Мітки: несинхронних, імпульсних, система, цифрова, завад, компенсації
Формула / Реферат:
Цифрова система компенсації несинхронних імпульсних завад, що містить запам'ятовуючий пристрій, вхід якого з'єднаний з входом системи і входом блока фазових фільтрів, вхід якого також приєднаний до входу системи, а його вихід приєднаний до його ж входу, блок виявлення та обчислення параметрів несинхронної імпульсної завади, основний вихід якого приєднаний до другого входу суматора, перший вхід якого приєднаний до виходу запам'ятовуючого...
Цифрова система компенсації несинхронних імпульсних завад
Номер патенту: 46625
Опубліковано: 15.05.2002
Автори: Часовський Валентин Олександрович, Чорнобородов Михайло Петрович
МПК: G01S 7/36
Мітки: імпульсних, цифрова, завад, система, компенсації, несинхронних
Формула / Реферат:
Цифрова система компенсації несинхронних імпульсних завад, у якій використовується дворазове перетворення Фур'є для визначення параметрів несинхронної імпульсної завади, що містить запам'ятовуючий пристрій, вхід якого з'єднаний із входом системи, суматор, один із входів якого з'єднаний з виходом запам'ятовуючого пристрою, а вихід з'єднаний з виходом системи, блок фазових фільтрів, вхід якого з'єднаний із входом системи, яка відрізняється тим,...
Цифрова система компенсації активних завад
Номер патенту: 19756
Опубліковано: 15.12.2006
Автори: КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Лаврентьєв Володимир Миколайович, Каспирович Олександр Геннадійович
МПК: G01S 7/36
Мітки: активних, система, компенсації, завад, цифрова
Формула / Реферат:
Цифрова система компенсації активних завад, що містить основний і допоміжний входи, основний і допоміжний блоки фазових фільтрів, кожний з яких містить по п фільтрів, основний і допоміжний комутатори, блок обчислення вагового коефіцієнта, основний і допоміжний блоки запам`ятовуючого пристрою (ЗП), суматор, помножувач, при цьому основний вхід системи підключений до входів основного блока фазових фільтрів і до входу основного блока ЗП, вихід...
Цифрова система спостереження

Номер патенту: 108844
Опубліковано: 25.06.2015
Автори: Гончарук Ігорь Анатольєвіч, Віноградов Сєргєй Міхайловіч, Шихов Алєксєй Алєксандровіч, Ботєновскій Сєргєй Лєонідовіч, Стріжнєв Алєксандр Гавріловіч, Лєднік Гєннадій Васільєвіч
МПК: G05B 11/01
Мітки: цифрова, спостереження, система
Спосіб розподіленої обробки інформації в мережі систем спостереження
Номер патенту: 49924
Опубліковано: 11.05.2010
Автори: Обод Іван Іванович, Охрименко Максим Юрійович, Заволодько Ганна Едвардівна
МПК: G01S 13/02
Мітки: спостереження, мережі, розподіленої, інформації, спосіб, обробки, систем
Формула / Реферат:
Спосіб розподіленої обробки інформації в мережі систем спостереження, який полягає в тому, що за допомогою систем спостереження, включених до мережі, приймають, оброблять та виявляють інформаційні сигнали, на основі міжперіодної обробки інформаційних сигналів проводять первинну обробку інформації, формують єдину шкалу часу мережі систем спостереження, який відрізняється тим, що позначають часом результати первинної обробки інформації систем...
Попередній патент: Цифрова система спостереження
Наступний патент: Скребок для ланцюгового скребкового конвеєра
Випадковий патент: Вентиляційна решітка