Спосіб керування безконтактним двигуном з постійними магнітами
Формула / Реферат
Спосіб керування безконтактним двигуном з постійними магнітами, при якому під час гальмування двигуна формують гальмівний момент, який відрізняється тим, що задають величину прямої складової статорного струму у прямокутній системі координат, жорстко зв'язаної з ротором, таким чином, щоб модуль миттєвої потужності гальмування механізму не перевищував величину сумарної потужності втрат в обмотках двигуна, елементах схеми комутатора та механізму.
Текст
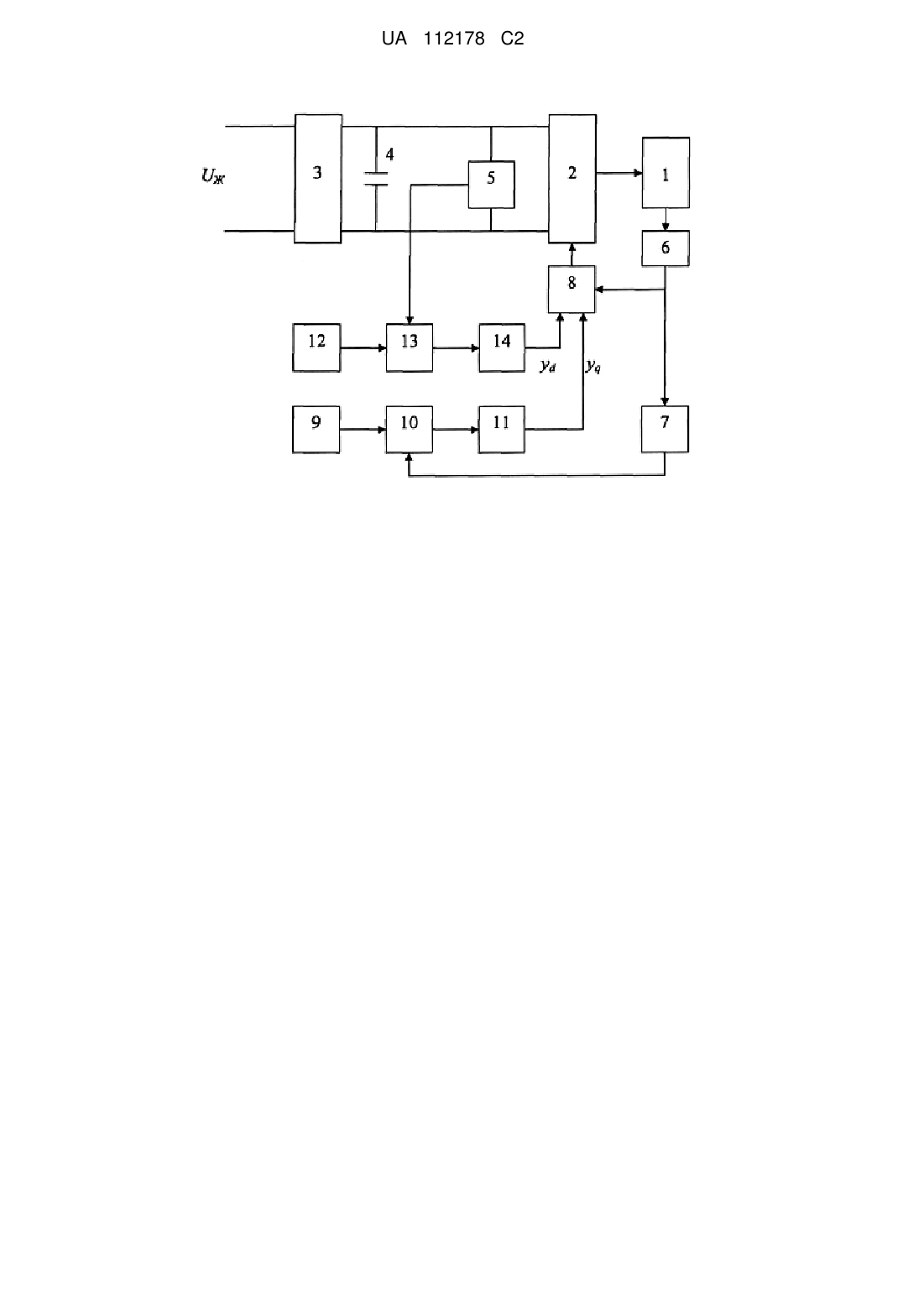
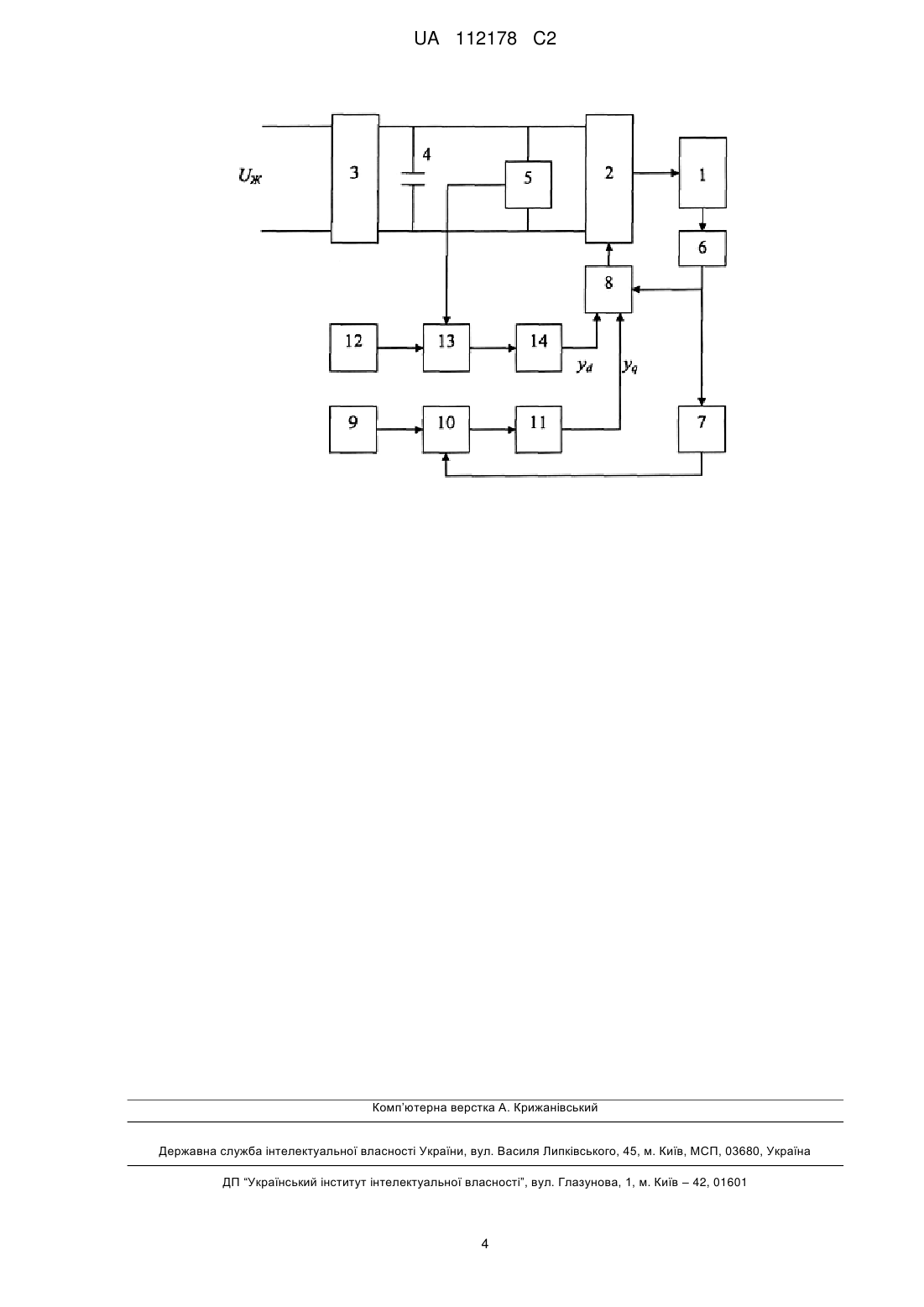
Реферат: Винахід належить до галузі електротехніки. Спосіб керування безконтактним двигуном з постійними магнітами полягає в тому, що під час гальмування двигуна задають величину прямої складової статорного струму у прямокутній системі координат, жорстко зв'язаної з ротором, таким чином, щоб модуль миттєвої потужності гальмування механізму не перевищував величину сумарної потужності втрат в обмотках двигуна, елементах схеми комутатора та механізму гальмування. Технічним результатом , що досягається даним винаходом, є забезпечення безпечного без перенапруг гальмування безконтактного двигуна з постійними магнітами, за рахунок розсіювання надлишків кінетичної енергії у активних опорах статорних обмоток, спрощення схеми електроприводу. UA 112178 C2 (12) UA 112178 C2 UA 112178 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області електротехніки, зокрема до електроприводів невеликої потужності на базі безконтактних двигунів з постійними магнітами, і може бути використаний при реалізації режиму гальмування двигуна без використання допоміжних гальмівних пристроїв. Відомий спосіб [1], при якому гальмування безконтактного двигуна змінного струму, що живиться від дволанкового перетворювача частоти, відбувається за рахунок рекуперації енергії гальмування до мережі живлення за допомогою керованого реверсивного перетворювача. Недоліком цього способу є складність реалізації керованого реверсивного перетворювача, використання якого є недоцільним при побудові електроприводів невеликої потужності. За прототип узятий найбільш близький по технічній суті спосіб керування, реалізований у електроприводі на основі безконтактного двигуна змінного струму та дволанкового перетворювача частоти із некерованим випрямлячем із гальмівним резистором у ланці постійного струму [1]. Спосіб полягає у тому, що при формуванні гальмівного моменту двигуна та його керованому гальмуванні, енергія гальмування розсіюється у резисторі у ланці постійного струму, за рахунок чого досягається безпечне гальмування з обмеженою величиною напруги у ланці перетворювача частоти. Недоліки прототипу полягають у тому, що для розсіювання енергії гальмування необхідне використання спеціального резистора, який вмикається під час гальмування за допомогою керованого силового ключа, що ускладнює апаратну частину схеми електропривода. Задачею винаходу було забезпечення керованого безпечного без перенапруг гальмування безконтактного двигуна з постійними магнітами без використання спеціальних допоміжних гальмівних пристроїв, що ускладнюють схему електропривода, шляхом розсіювання енергії гальмування у статорних обмотках двигуна за рахунок цілеспрямованого керування під час гальмування прямою складовою статорного струму у прямокутній системі координат, жорстко зв'язаної з ротором. Ця задача вирішується тим, що при використанні способу керування безконтактним двигуном з постійними магнітами, основаному на формуванні гальмівного моменту двигуна під час його гальмування, задають величину прямої складової статорного струму у прямокутній системі координат, жорстко зв'язаної з ротором, таким чином, щоби модуль миттєвої потужності гальмування механізму не перевищував величину сумарної потужності втрат в обмотках двигуна, елементах схеми комутатора та механізму. Досягнення нового позитивного ефекту обумовлено таким. Кероване завдання величини прямої складової статорного струму у прямокутній системі координат, жорстко зв'язаної з ротором, під час гальмування безконтактного двигуна забезпечує керований вплив на рівень втрат в активних опорах статорних обмоток двигуна, а це дозволяє розсіювати у цих активних опорах надлишку кінетичної енергії, що накопичена у масах ротора безконтактного двигуна та механізму. Таким чином, досягається безпечне кероване гальмування безконтактного двигуна з постійними магнітами без можливих перенапруг на елементах схеми електроприводу без використання допоміжних апаратних гальмівних засобів. Тому на підставі викладеного можна зробити висновок про те, що сукупність істотних відмінностей, що запропоновані у формулі винаходу, необхідні і достатні для досягнення нового технічного результату. Як приклад реалізації запропонованого способу представлений електропривод, робота якого пояснюється за допомогою креслення. На кресленні представлена функціональна схема електропривода, що реалізує спосіб керування безконтактним двигуном з постійними магнітами. Електропривод містить безконтактний двигун 1 (Фіг.), статорні обмотки якого підключені до виходу комутатора 2, входи живлення якого з'єднані з вихідними виводами однофазного мостового випрямляча 3, виводами конденсатора 4 та входами датчика 5 напруги, на перший та другий входи випрямляча 3 подано вхідну напругу живлення мережі живлення, вихід блока 6 визначення положення ротора, з'єднаного з двигуном 1, подано на вхід датчика 7 частоти обертання та перший вхід блока 8 формування керуючих сигналів, вихід якого з'єднано з входом керування комутатора 2, вихід блока 9 задання частоти обертання з'єднаний з першим входом першого блока 10 віднімання, другий вхід якого з'єднаний з виходом датчика 7 частоти обертання, а вихід - з входом регулятора 11 частоти обертання, вихід якого з'єднаний з другим входом комутатора 2, вихід блока 12 задання обмеження напруги з'єднаний з першим входом другого блока 13 віднімання, другий вхід якого з'єднаний з виходом датчика 5 напруги, а вихід з входом регулятора 14 напруги, вихід якого з'єднаний з третім входом комутатора 2. Спосіб здійснюють таким чином. У сталому стані режиму роботи електроприводу вхідна напруга мережі живлення UЖ за допомогою однофазного мостового некерованого випрямляча 3 випрямляється, згладжується завдяки дії конденсатора 4, на виводах якого встановлюється напруга UC , та подається на 1 UA 112178 C2 5 10 входи датчика 5 напруги та входи живлення комутатора 2, на виході якого відповідно до керуючого впливу блока 8 формування керуючих сигналів формуються напруги, що подаються на статорні обмотки безконтактного двигуна 1. На виході блока 6 визначення положення ротору формується відповідний сигнал, що подається на вхід датчика 7 частоти обертання та перший вхід блока 8 формування керуючих сигналів. На виході датчика 7 частоти обертання формується сигнал, пропорційний частоті обертання безконтактного двигуна 1, який віднімається від сигналу завдання частоти обертання з виходу блока 9 задання частоти обертання, а одержана різниця подається на вхід регулятора 11 частоти обертання. На його виході формується сигнал y q керування, що відповідає квадратурній складовій Iq статорного струму у прямокутній системі d, q координат, жорстко зв'язаної з ротором. Момент MД двигуна 1, що врівноважується моментом MН навантаження механізму, визначається пропорційно до квадратурної складової Iq MД 0,5 m km Iq , 15 де m - кількість фаз статорних обмоток двигуна; k m - постійний коефіцієнт двигуна 1. При цьому у сталому стані режиму роботи електроприводу випрямлена напруга UC дорівнює номінальному значенню UСН , при якому вихідний сигнал регулятора 14 напруги y d , що відповідає прямій складовій Id статорного струму, дорівнює нулю, оскільки ця складова не впливає на величину моменту MД двигуна 1, а лише викликає підвищення діючого значення 20 струму I Д статора та відповідне підвищення втрат у активних опорах статорних обмоток. Діюче значення струму I Д статора визначається як 2 2 IД 0,5 Iq Id . 25 30 35 40 45 Відповідно до керуючих сигналів y d та y q , а також сигналу з виходу блока 6 визначення положення ротора у блоці 8 формуються керуючі сигналів, що впливають на роботу комутатора 2. При переводі двигуна 1 із сталого режиму роботи у режим його гальмування на виході блока 9 задання частоти обертання відбувається поступове зменшення сигналу задання частоти обертання та відповідне до заданої інтенсивності гальмування формування квадратурної складової Iq статорного струму та гальмівного моменту MГ двигуна 1. При цьому кінетична енергія WK , що накопичена у масах ротора двигуна 1 та механізму, що обертаються, розсіюється у статорних обмотках двигуна 1, елементах схеми комутатора 2 та у механізмі. Визначимо миттєву потужність PГ гальмування механізму, що витрачається у процесі гальмування двигуна 1 механічним акумулятором кінетичної енергії у вигляді мас ротора та механізму, що обертаються, а також потужності втрат PЕл у активних опорах статорних обмоток та втрат PMx у механізмі dWK J d2 2 2 ;PЭл 0,5 m R Id Iq ;PMx MН , dt 2 dt де J - сумарний момент інерції двигуна 1 та механізму; - частота обертання двигуна 1; R - активний опір статорної обмотки; MН - момент навантаження на валу двигуна 1 в залежності від частоти обертання . Потужність втрат PK в елементах схеми комутатора 2 визначається падіннями напруги на силових ключах, величинами струмів, частотою комутації та динамічними втратами у силових ключах. Визначення цієї потужності є досить складною задачею, але враховуючи, що сучасні напівпровідникові комутатори мають високий ККД, то величина PK має незначний вплив порівнюючи з іншими складовими втрат. Таким чином, потужність втрат визначається сумою складових P PЭл PK PMx . За умови, якщо миттєва потужність гальмування механізму PГ менше потужності втрат P , кінетична енергія гальмування розсіюється у статорних обмотках двигуна 1, елементах комутатора 2 та у механізмі, напруга на конденсаторі 4 залишається на номінальному рівні, а PГ 2 UA 112178 C2 регулятор 14 напруги налаштований таким чином, що при виконанні умови PГ P на його виході формується керуючий сигнал y d , що забезпечує виконання рівності Id 0 . Якщо миттєва потужність PГ гальмування механізму починає перевищувати потужність втрат P , надлишок кінетичної енергії WK починає накопичуватись у конденсаторі 4, що 5 призводить до зростання напруги UC . При досягненні заданого рівня напруги на конденсаторі 4, що відповідає сигналу задання на виході блока 12 задання обмеження напруги, на виході регулятора 14 напруги починає формуватись сигнал y d , що забезпечує зростання прямої складової статорного струму Id , що викликає відповідне зростання діючого значення струму I Д статора та втрат PЕл у активних опорах статорних обмоток. Таке зростання буде відбуватися 10 15 20 25 30 доти, поки не почне виконуватись умова безпечного гальмування двигуна 1 - PГ P (тобто модуль миттєвої потужності PГ гальмування механізму не перевищує величину сумарної потужності P втрат в обмотках двигуна, елементах схеми комутатора та механізму), при цьому небезпечне зростання напруги UC припиняється. У разі, якщо усі умови гальмування двигуна 1 та параметри електроприводу відомі заздалегідь, можливе виконання умови безпечного гальмування PГ P без використання датчика 5 напруги шляхом попереднього розрахунку та задання відповідної залежності прямої складової Id статорного струму від величини частоти обертання . Тим самим, забезпечують безпечне гальмування двигуна 1 за рахунок розсіювання надлишку кінетичної енергії, що накопичена у масах ротора та механізму, у активних опорах статорної обмотки без використання допоміжних гальмівних апаратних засобів. Таким чином, у новому технічному рішенні шляхом керованого задання у відомому способі керування безконтактним двигуном (при якому під час гальмування двигуна формують гальмівний момент) величини прямої складової статорного струму у прямокутній системі координат, жорстко зв'язаної з ротором, таким чином, щоби модуль миттєвої потужності гальмування механізму не перевищував величину сумарної потужності втрат в обмотках двигуна, елементах схеми комутатора та механізму, досягається безпечне кероване гальмування безконтактного двигуна з постійними магнітами без можливих перенапруг на елементах схеми електроприводу без використання допоміжних апаратних гальмівних засобів за рахунок розсіювання надлишку кінетичної енергії, що накопичена у масах ротора двигуна та механізму, у активних опорах статорних обмоток двигуна. Джерела інформації: 1. Крутиков К.К., Рожков В.В Применение многофункциональных силовых активных фильтров в составе мощного частотно-регулируемого электропривода// Электричество - 2011. № 2. - С. 32-38. 35 ФОРМУЛА ВИНАХОДУ 40 Спосіб керування безконтактним двигуном з постійними магнітами, при якому під час гальмування двигуна формують гальмівний момент, який відрізняється тим, що задають величину прямої складової статорного струму у прямокутній системі координат, жорстко зв'язаної з ротором, таким чином, щоб модуль миттєвої потужності гальмування механізму не перевищував величину сумарної потужності втрат в обмотках двигуна, елементах схеми комутатора та механізму. 3 UA 112178 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюAnikin Kostiantyn Pavlovych
Автори російськоюАкинин Константин Павлович
МПК / Мітки
МПК: H02P 6/24
Мітки: постійними, двигуном, керування, безконтактним, магнітами, спосіб
Код посилання
<a href="https://ua.patents.su/6-112178-sposib-keruvannya-bezkontaktnim-dvigunom-z-postijjnimi-magnitami.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування безконтактним двигуном з постійними магнітами</a>
Спосіб керування безконтактним двигуном з постійними магнітами

Номер патенту: 66449
Опубліковано: 10.01.2012
Автор: Акинін Костянтин Павлович
МПК: H02P 6/00
Мітки: магнітами, керування, двигуном, безконтактним, постійними, спосіб
Формула / Реферат:
Спосіб керування безконтактним двигуном з постійними магнітами, що включає формування по сигналах двох датчиків Холла сигналу зворотного зв'язку, порівняння його із сигналом задання і вплив на підсилювач потужності в ланцюзі обмотки статора двигуна, який відрізняється тим, що інвертують первинні сигнали двох датчиків Холла, із квазілінійних ділянок первинних та інвертованих сигналів формують кусково-лінійний сигнал, який порівнюють із...
Спосіб керування безконтактним двигуном
Номер патенту: 98265
Опубліковано: 25.04.2012
Автори: Акинін Костянтин Павлович, Баранніков Олександр Володимирович
МПК: H02K 29/00, H02P 6/00
Мітки: керування, спосіб, двигуном, безконтактним
Формула / Реферат:
Спосіб керування безконтактним двигуном, при якому на комутатор в ланцюзі обмотки статора безконтактного двигуна впливають напругою живлення та сигналами управління частотою та напрямком обертання ротора, який відрізняється тим, що вхідну напругу живлення попередньо випрямляють, формують перший та другий сигнали, пропорційні першій та другій напругам між одним із вхідних виводів живлення комутатора та відповідно з першим та другим входами...
Пристрій керування безконтактним двигуном
Номер патенту: 104079
Опубліковано: 25.12.2013
Автори: Баранніков Олександр Володимирович, Акинін Костянтин Павлович
МПК: H02K 29/00, H02P 7/06
Мітки: керування, безконтактним, пристрій, двигуном
Формула / Реферат:
Пристрій керування безконтактним двигуном, який містить безконтактний двигун, статорна обмотка якого з'єднана із виходом комутатора, перший та другий датчики напруги, перші входи яких з'єднані із входом нижнього рівня живлення комутатора, функціональний перетворювач, вихід якого з'єднаний із третім входом комутатора, другий вхід першого датчика напруги з'єднаний з одним із двох виводів джерела живлення постійного струму, а вихід - з входом...
Спосіб керування безконтактним магнітоелектричним двигуном
Номер патенту: 89845
Опубліковано: 10.03.2010
Автори: Кіреєв Володимир Георгійович, Акинін Костянтин Павлович, Антонов Олександр Євгенович
МПК: H02P 6/00
Мітки: магнітоелектричним, двигуном, спосіб, безконтактним, керування
Формула / Реферат:
Спосіб керування безконтактним магнітоелектричним двигуном, при якому по сигналах двох датчиків Холла формують сигнал зворотного зв'язку, порівнюють його із сигналом задання і впливають на підсилювач потужності в ланцюзі обмотки статора двигуна, який відрізняється тим, що амплітуди сигналів датчиків Холла, принаймні один із яких виконаний аналоговим, на кожному періоді приводять до єдиного нормованого рівня, порівнюють поточні значення...
Спосіб керування асинхронним двигуном при важкому рушанні та пристрій для його реалізації
Номер патенту: 84176
Опубліковано: 25.09.2008
Автори: Ємець Валерій Васильович, Конох Ігор Сергійович, Романенко Катерина Георгіївна, Гомілко Володимир Іванович, Гладир Андрій Іванович, Хребтова Оксана Анатоліївна
МПК: H02P 1/00
Мітки: рушанні, керування, спосіб, реалізації, пристрій, двигуном, важкому, асинхронним
Формула / Реферат:
1. Спосіб керування асинхронним двигуном при важкому рушанні, що полягає в підключенні асинхронного двигуна до трифазної мережі через перетворювач частоти, формуванні протягом часу t = tT електромагнітного моменту двигуна у функції часу з поступовим збільшенням до значення МП0, що дорівнює пусковому моменту двигуна, контролі процесу запуску впродовж часу t = tB шляхом обчислення ковзання s за миттєвими значеннями струму та напруги статора,...
Попередній патент: Силовий ступеневий перемикач
Наступний патент: Спосіб настройки компенсації ємнісного струму замикання на землю в електричних мережах
Випадковий патент: Спосіб виготовлення нерозбірних конвеєрних ланцюгів